SpaceX launched into orbit for the U.S. Space Force the fifth GPS III satellite (SV05) on June 17.
Photo: U.S. Space Force
GPS III SV05 eventually will replace one of the legacy GPS IIR satellites. Once GPS III SV05 is operational, about 16% of the 31-satellite constellation will be modernized with GPS III’s new capabilities.
M-Code Requirement Met
GPS III SV05 is the 24th M-code satellite on orbit, completing the constellation’s baseline requirement to provide U.S. military forces a more-secure, harder-to-jam and spoof GPS signal.
GPS III SV05 is the fifth Lockheed Martin-built, next-generation GPS III space vehicle. The SpaceX Falcon 9 rocket is the first U.S. Space Force mission to reuse a previously-flown booster, the company said.
The U.S. Space Force contracted Lockheed Martin to design and build GPS III/GPS IIIF satellites to help modernize today’s GPS satellite constellation with new technology and advanced capabilities. Lockheed Martin said the GPS III provides three-times greater accuracy, eight times improved anti-jamming capability for U.S. military forces; a new L1C civil signal to the constellation that is compatible with other GNSS; and a new modular design that allows new technology and capabilities to be added in the future to better address changing mission needs and emerging threats.
Future GPS III Satellites
GPS III Space Vehicles 06, 07 and 08 already are complete and waiting to be called up for their launch dates, which are to be determined.
In addition, GPS III SV09 was core-mated, meaning it reached a major production milestone in which two major satellite components — the mission module and the propulsion core — are paired to form one space vehicle. The GPS III SV10 currently is in the component build up stage.
Lockheed Martin has been contracted to design and build up to 22 additional GPS III Follow On – or GPS IIIF – satellites (SV11-32), with even more capabilities. Contract options for the first four GPS IIIFs, SV11-14, have been exercised so far.
The U.S. Space Force contracted Lockheed Martin to design and build GPS III/GPS IIIF to help modernize today’s GPS satellite constellation. Photo: Lockheed Martin
Avalanches can be a danger for skiers as well as for the resort towns that welcome them. For protection, towns erect steel fences to act as barriers along the ski slopes. But before these snow barriers can be built, steep rock faces and cliffs need to be surveyed.
Darnuzer Ingenieure AG, a Swiss-based surveying and mapping company, uses a drone with a built-in high-performance GPS receiver to survey these harsh areas in hours.
“Drones have made mapping workflows faster, safer and more efficient,” said Septentrio’s senior market access manager Gustavo Lopez. “GNSS technology has led to the evolution of post-processing kinematic (PPK) methods, which help make the photogrammetry process efficient and accurate.”
Every year, thousands of tourists visit Davos in the Swiss Alps. To protect the town and the skiers, avalanche barriers were built along the steep slopes. To plan the work along the uneven rock face, a detailed 3D reconstruction of the area was needed, but getting to the survey site would be a rock-climbing feat.
Darnuzer Ingenieure used the WingtraOne fixed-winged drone, which features a top-quality camera and a Septentrio high-performance GNSS receiver. A single surveyor took the drone to the rocky Parsenn slope during the summer season, capturing ground images — without snow — that were needed for the 3D model.
WingtraOne PPK enabled high-precision mapping without the need for ground control points. During the flight, each image was accurately time-stamped and raw GNSS data from the Septentrio AsteRx-m2 receiver was carefully logged.
Even in this mountainous region, where peaks obstruct the sky, the receiver delivered continuous positioning. The GNSS data was processed by the GeoTagZ software library, which used corrections from a nearby base station to generate real-time kinematic (RTK) centimeter-level positioning.
The GeoTagZ software library incorporated Septentrio’s core GNSS algorithms to assure the best positioning performance. Accurate positioning was then synchronized with the images in the next step of the post-processing workflow.
It only took Wingtra a few days to integrate the GeoTagZ library into its WingtraHub software package. Integration of GeoTagZ into WingtraHub simplifies mapping jobs for customers like Darnuzer Ingenieure.
“The beauty of this solution is that the drone benefits from the receiver’s high-quality raw measurements without the need for a real-time corrections link for accuracy,” Lopez said. “The quality of the measurements comes from the technology built into Septentrio’s receivers, which is designed to be resilient to radio frequency interference and multipath. In post-processing, the GeoTagZ software enables the most accurate positioning, thanks to its high-performance RTK engine.”
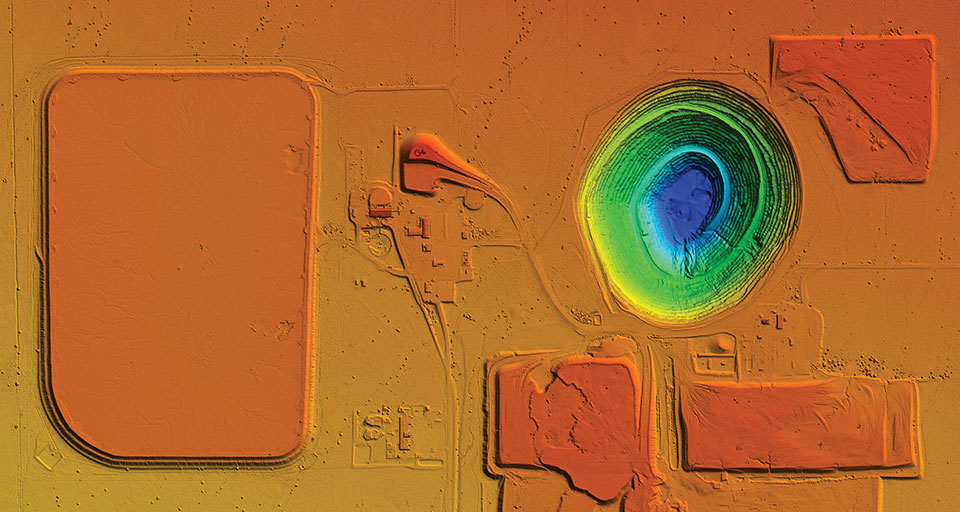
UAVs provided Synergy Geomatics with the safest and most effective way to survey and map a 2,400-acre open-pit mine, and collect about a gallon of water from the bottom of the pit.
The Phoenix, Arizona-based survey, mapping and inspection company took on these two tasks at the Sacaton Mine in Casa Grande, Arizona, which shut down in 1984.
With an old mine of that size, the topographic survey was a large undertaking that lasted several days, said Synergy Geomatics CEO Doug Andriuk. A JAVAD-1M receiver and Triumph-LS real-time kinematic land survey machine were used to set and collect about 80 ground control points.
“This is outstanding survey gear for a large project like this,” he said. “The batteries last 24 hours, the setup takes a couple of minutes, and the multitude of radio options keep us connected all over the project. The dataset was comprised of more than 6,000 images and took several days to process.”
One day of field work followed by 1.5 hours of image capture using a Cessna 172 equipped with the Syn-Cam was required to map the mine.
The company used a proprietary method to collect high aspect imagery of the mine pit, because it allowed for a greater level of accuracy on steep surfaces. Manual and algorithmic filtering removed all the vegetation and structures on the site, and then generated 1- and 5-feet contours.
Collecting water from the bottom of the mine pit presented Synergy Geomatics with several challenges. It had been 30 years since anyone had been to the bottom of the pit, and the roads that led there had washed away long ago.
The use of a manned helicopter was briefly considered, but was not going to work in the tight, 1,500-foot-deep pit.
“We had a better, safer and less expensive solution,” Andriuk said. “We proposed the use of a drone carrying a water-sampling bailer, which is a poly tube with only a one-way check valve on the end. You can dip it in the water, and it will just keep filling up.”
Not only did the drone have to descend 1,500 feet, it had to collect water, too. Testing the drone’s capabilities to collect and carry nearly a gallon of water helped ensure the company would complete the task successfully with a few modifications.
“Multicopters don’t like to descend straight down, as they hit their own propwash, so a spiraling descent has to be made without hitting the walls of the pit,” he explained. “Then the drone must dip the bailer and ensure that it collects the right amount of water.”
Holes were drilled into the bailer to limit the amount of water collected. That way, the drone was not overloaded and could travel safely back to its landing zone with the additional weight.
Determining how high the drone needed to be above the water surface also posed a challenge.
“We opted to use two drones, a large one for the water sample and a smaller drone with a high-definition camera to give the pilot of the first drone clear visibility of the bailer over the water,” he said. “It took four trips, each lasting about 10 minutes, to collect a full gallon of bright green highly alkaline mine pit water.”
Positioning, navigation and timing (PNT) orbs guide 50-ton robots carrying containers at the Ports of Auckland.
In a world-exclusive report, GPS World visited with officials at the Ports of Auckland, New Zealand, and the Australian company Locata to reveal a revolutionary port automation system. Locata’s navigation system could change the way containers are handled around the globe, and open the floodgates for next-generation automation of Critical National Infrastructure sites.
Global shipping lines, ports and container terminals are at the heart of the immense, multi-trillion-dollar global logistics market, and ports are classed as critical infrastructure in many nations.
Much of the world’s port infrastructure is old, has no space to expand, and strains at the seams as it faces the reality of handing larger cargo volumes and massive new container ships —some with more than 22,000 containers on board. Efficiently managing the huge spike in container moves caused by the arrival of these gigantic new vessels is a critical requirement for container terminals and their logistics chains, and the problem will only become more acute.
Once arriving at port, container vessels are offloaded by ship-to-shore (STS) cranes. (Photo: bfk92/E+/Getty Images)
Automating operations at ports and intermodal hubs to accelerate their throughput is an obvious solution. “Automate or die” is now an accepted industry mantra, and indeed a small number of terminals around the world have been automated in the past. Early attempts at using GPS for positioning autonomous machines promptly fizzled, however. A chaotic environment of gigantic moving metal machines and constantly changing metal container stacks creates insurmountable blockage and multipath position errors. The environment makes it impossible to guarantee ultra-reliable, centimeter-level GNSS positioning.
In the past, the industry had to resort to providing basic-level positioning by drilling holes to install (with no exaggeration) between 50,000 and 500,000 RFID transponders or magnets in the port’s pavement. This was extremely tedious and labor intensive, and came with serious downsides. The transponders do not work well for differing machine sizes because they usually require reader antennas, the size of two regular house doors, under the machine. Furthermore, the drilling deteriorates the pavement — the ports’ most valuable asset.
The biggest problem, however, was that for a fully operational site like Auckland — known as brownfields in the industry — the port often would have to be closed for years to allow the transponders and pavement to be installed. Such a shutdown isn’t feasible for most operating ports; hence, brown-fields were considered next-to-impossible to automate.
Although this may seem to be less of an issue for new greenfields ports (those built from scratch), buried transponders essentially lock in the mobility and usage patterns for any port, requiring another shutdown to make changes. In all, the logistics industry and its machine manufacturers urgently need a viable, flexible, reliable positioning solution for terminal automation — and soon.
A New Solution
It’s now been revealed that a new solution for this urgent requirement had, in fact, been in stealth mode development for many years. Due to commercial competitive considerations, all the work had taken place under the radar and without publicity. Konecranes, the largest port machine manufacturer, had been developing fully autonomous straddle carriers specifically to address this market, in partnership with Australian company Locata Corporation.
This totally new automation system is being rolled out now at multiple terminals around the world. The first port to emerge with this trailblazing capability is the Ports of Auckland.
Locata’s ground-based GNSS-like positioning system is changing the game for logistics terminals. The Ports of Auckland is the first of many ports and logistics hubs around the globe currently operating or installing Locata (see Figure 1). In the process, the port is delivering the global logistics industry a raft of world-first capabilities.
Figure 1. The Ports of Auckland covers 140 acres at the doorstep of Auckland’s central business district. The outline shows the approximate coverage of the LocataNet local positioning system (landside only). (Photo: Ross Clark/Ports of Auckland)
Partners on this project — the government owners of the Ports of Auckland; its system supplier Konecranes; and Locata — are breaking new ground and in the process opening the floodgates for next-generation machine automation of critical national infrastructure sites.
Groundbreaking Capabilities
Living on an island means every-day items are delivered via cargo ships. That’s certainly the case in Auckland, New Zealand’s largest city, which has a harbor on the Pacific Ocean.
The Ports of Auckland is the largest terminal for commercial freight that arrives in New Zealand. Its 140-acre international trade port is in the heart of the city and surrounded by water, so expansion by reclaiming land is out of the question, even as the country continues to grow.
With this situation, the port’s operator was faced with the seemingly impossible: double the handling capacity of the port in a few years without reclaiming any more land. They turned to automation and cutting-edge technology to find a solution.
Everything that arrives at the port is in a standardized shipping container. The port’s plot of land is usually crammed with the maximum number of containers it can hold. The Ports of Auckland had to seek out automation that increases the terminal’s capacity by stacking containers higher, stacking them close together, and generally making things move faster and more efficiently.
For inbound cargo, once a container is unlocked from its ships, ship-to-shore (STS) cranes unload them to ground level. Straddle carriers then lift and move each container to a ground-level holding area, where it is stored and then transferred to a truck or a train that will deliver it to its ultimate destination.
Export cargo arrives at the port via truck or train, and the straddle carriers handle them through the port’s storage areas to be loaded onto a ship.
The port also handles trans-shipments; containers that arrive via a ship destined to be loaded onto another ship. These handling processes are repeated over and over around the clock, operating pre-automation at a capacity of around 900,000 containers per year.
Straddle carriers are the workhorses of the operation, moving containers within the port. Manual straddles are operated by trained onboard drivers and can stack containers two high. In a traditional manual environment, a driver’s time is divided between tasks that require skill such as picking up a container from the STS crane, or on repetitive work — like organizing containers for efficient loading onto ships, trains and trucks — which are tasks that can readily be automated.
By adding automation, the Ports of Auckland created a mix of manual and automated straddles working together at the terminal. Drivers are assigned the more interesting and skillful tasks, while the automated robotic straddles carry out the repetitive, “boring” tasks.
“Very soon, when the automation system is fully implemented, our straddle carrier fleet will consist of 27 Konecranes Fully-Automated Straddle Carriers (A-STRAD), and 24 manned straddle carriers,” said Ross Clarke, program manager of Auckland’s Port Automation Project. “This interaction of manned and automated machines, without any physical infrastructure separating them, is a world first.”
The A-STRADs are bigger than the manual straddles. The 50-ton, four-story-high machines can move 40-foot containers weighing 50 tons around the port at up to 30 kilometers per hour. Each can stack containers up to three high and closer together.
Five fully autonomous Konecranes A-STRADs at work in the Ports of Auckland. The Locata VRay Orb antennas can be seen at the top of each straddle. (Photo: Photo: Ross Clark/Ports of Auckland)
With the new automated system, the Ports of Auckland will almost double the capacity of the terminal to 1.7 million containers per year once automation is fully implemented in early 2021.
The Ports of Auckland chose Konecranes to supply the fully-autonomous straddle carriers. With no cab, A-STRADs are uniquely identifiable as autonomous. A-STRADs can drive around the port, lifting and moving containers in the same way as their manual predecessors, using their spreader and assisted by the onboard sensors. A critical difference is how they position themselves and how they safely operate in an environment with many other objects, manual straddles, A-STRADs and container stacks.
At the heart of this capability is the Locata local positioning system. It allows A-STRADs to reliably position themselves to centimeter-level accuracy throughout the terminal work area. Every A-STRAD has two Locata antennas, each attached to a Locata Rover receiver, that enable an A-STRAD to accurately determine its position and orientation.
Driver Assistance. Both the A-STRADs and the manual straddles at the Ports of Auckland are positioned using Locata technology. The manned straddle carriers are fitted with a driver-assistance system, which is also positioned by Locata, so their operations can be monitored and coordinated in lock-step with autonomous A-STRADs.
“The driver assistance system operates a lot like the auto-parking system in a car,” Clarke said. “When manned straddles are near the interchange area where they interact with A-STRADs, operators change to driver-assist mode and can take their hands off the steering wheel, allowing the system to autonomously guide the straddle carrier to the correct stack location with an accuracy of +/–3 cm.”
Roots of a New Strategy
The groundbreaking positioning system has been in the works for several decades.
“Locata has been working on this ‘terrestrial replica of GNSS’ capability for 25 years,” Locata CEO Nunzio Gambale told GPS World. “It didn’t spring up one day just because co-founder David Small and I thought, hey, we’d like to replace the GPS satellites.
“Our driving vision has been to provide accurate performance in myriad environments where we always knew GNSS was going to fail to deliver,” Gambale continued. “Importantly, what you see today is not just ‘a lab experiment’ or a prototype test system. It’s operationally deployed, enabling some of the most demanding positioning applications on Earth. Our team has been laser-focused on developing real technology which improves on GPS-like positioning, and delivering solid solutions for real-world problems modern applications now face.”
The Locata System
Two LocataLite transmitter antennas, installed 23 meters up a light pole, provide high-accuracy positioning coverage over part of the Ports of Auckland. (photo: Photo: David Small/Locata)
LocataLites. Locata is a local positioning system that uses a network of synchronized transmitters, known as LocataLites, installed in and around the port to cover all straddle work areas. The LocataLites work like miniature GPS satellites, transmitting GPS-like signals using two frequencies in the 2.4-GHz ISM band.
LocataLites are strategically installed and configured to deliver reliable centimeter-level accuracy, with particular attention paid to the geometry available from the network when the installation layout is designed. This LocataLite network (called a LocataNet) enables the equipment on each straddle carrier to trilaterate its position using a method similar to GNSS positioning.
Locata technology is built upon two critical proprietary capabilities developed and perfected over many years: TimeLoc and multipath mitigation. To date, Locata has been granted more than 160 patents on these core advances.
Sub-Nanosecond TimeLoc. First, LocataLites use their own broadcast signals to time synchronize with each other using a proprietary technology called TimeLoc. This allows all the LocataLites in a LocataNet to time synchronize with each other to sub-nanosecond levels without requiring atomic clocks.
Mutipath Mitigation. Second, Locata’s proprietary multipath mitigation technology enables Locata receivers to correctly track direct signals, even in an environment filled with reflected signals. Multipath is the main reason GNSS can’t deliver the accuracy and reliability required at a port.
Locata’s multipath mitigation technology has two components: the Locata receiver and the VRay Orb antenna.
Locata receivers. The receivers incorporate a proprietary signal-processing technique, correlator beamforming (CBF), which delivers beam-forming capability comparable to advanced phased-array antennas.CBF allows the Locata receiver to combine signal samples from its multiple antenna elements to form virtual “beams,” and any signal outside of a given virtual beam is ignored.
Unlike traditional phased arrays, however, the Locata CBF system is markedly less complex and orders of magnitude less expensive. CBF uses only one RF front end, yet it can form millions of individually-steered beams per second.
VRay Orbs. The straddle carriers at the Ports of Auckland are the first commercial operating deployment of Locata’s VRay Orb antennas, with two orbs atop every A-STRAD as well as the manual straddles (Opening Photo).
A row of Locata VRay Orb60 antennas atop Konecranes A-STRAD machines stretch into the distance toward Auckland’s business district. (Photo: David Small/Locata)
Bespoke Positioning
The placement of LocataLite positioning transmitters on any site is entirely within the control of the LocataNet designer. “Our partners can place them where they want, in as high a density as they want, and as accurately as they need to get their job done,” Gambale said. “The LocataNet delivers rock-solid, super-reliable positioning in environments where that wasn’t possible before.”
With GNSS, users have no control over the geometry of the satellites in view. “That’s a huge problem in many of these high-accuracy applications because it can greatly affect your DOP [dilution of precision] geometry,” he added. “Engineers trying to rely on GNSS can see huge variability — or complete failure — in a machine’s position. Unreliable positioning is not acceptable when an enterprise is relying on 50-ton autonomous machines, doing critical work that you cannot afford to stop.”
According to Clarke, “Locata is well-suited to our requirements as it offers high precision, high resistance to interference, and high reliability.”
Breakthroughs at the Port
Locata’s enabling technology has brought multiple breakthrough advantages to terminal automation. Critical among them is the ability to automate a terminal while in full operation.
“Because our container terminal is working at high utilization, with no spare space to operate, we are deploying the automation in two phases,” Clarke said. “The first phase started commercial operations in August 2020, and we have now handled more than 35 ships using the automated system. The next phase, with the entire terminal running fully operational automation, is scheduled to enter service in early April 2021.”
Flexibility. The new system also provides extreme flexibility to alter the layout of operations in real time, something never possible with transponders embedded in the ground. A-STRADs drive around using a digital map. With Locata, this map can be changed as often as needed without having to change anything in the infrastructure.
Reduced Wear and Tear. Before automation, line markings on the pavement guided operators on paths and in storage areas. While this kept operations orderly, following the marked lines caused ruts in the pavement that eventually require costly and time-consuming repairs.
“With A-STRAD positioning being so precise and repeatable, this accuracy could have caused serious ruts and also become a problem,” Clarke said. “With Locata and the ‘invisible’ digital pavement markings, we came up with a cool solution to this that we call ‘stack shuffling.’ We shift the digital drive paths and storage plots over time so that wear and tear on the pavement is spread more evenly, requiring fewer repairs to the tarmac.”
The shuffling is imperceptible to a human, but the A-STRADs are spreading the wear across the entire tarmac and greatly extending the service life of the terminal surface, according to Clarke.
Less Fuel. The automation also brings significant environmental benefits. “A-STRADs use approximately 10% less fuel, which means they are indeed cheaper to run,” Clarke said.
Locata-enabled manned straddles near STS cranes unload a ship at dusk. (Photo: Photo: David Small/Locata)
Autonomous and Manned
Ensuring the safety of workers, machinery and cargo is a critical requirement at any port. All parts of the Ports of Auckland’s new system were tested for two years, including system software from both Konecranes and Locata.
The software was tested in pieces as it was developed. Then, full system functionality was delivered and tested. Both automated and manual straddles are centrally monitored and coordinated by this terminal operating system.
Working Together. Auckland’s port is the first in the world to use autonomous and manned machines together without a physical separation. This allows skilled operators to manually handle operations in specific areas, while the autonomous A-STRADs are tasked with monotonous and time-consuming jobs with no practical limitation on the machine’s repeatability.
Within the access-controlled premises in Auckland, all work areas are constantly monitored by the centralized system. The Locata system tracks the location of all straddle carriers at all times.
Training. All manual straddle drivers go through virtual and hands-on training with specific attention paid to safety protocols.
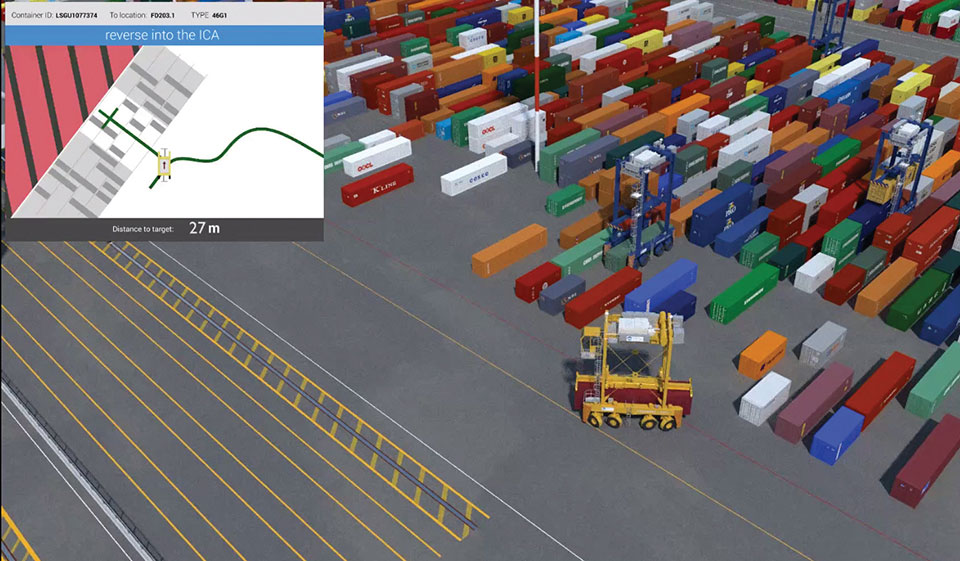
“Once they’ve first learned what to do in a simulator,” Clarke said, “they then carry out the same tasks with an instructor in a real straddle carrier. We also train our control room staff in a virtual training environment that’s a bit like a container terminal version of a flight simulator.” Figure 2 shows the screen of the operator training simulator.
Figure 2. The straddle carrier simulator used for manual straddle operator training shows (top left) the container drop-off location, designated path, and open and restricted zones. (Photo: Ross Clark/Ports of Auckland)
Laser Scanners. As a last line of defense, autonomous A-STRADs are equipped with laser scanners that detect obstacles and automatically engage collision prevention measures, if required.
More Locata Applications
Port machinery automation is the most recent industrial sector to reveal the adoption of Locata technology. However, Locata is already used by large industry partners for deep-pit mining where mine pit walls act like deep urban canyons and severely limit the sky view. (See GPS World, March 2017.)
Locata also is being used as the core truth reference positioning system at the U.S. Air Force (USAF) White Sands Missile Range. There, it is independently providing high-accuracy non-GPS-based positioning when GPS signals are heavily jammed; this is practically the Holy Grail for alternative PNT, and the USAF has been using the system operationally at White Sands since 2016. (See GPS World, January 2020.)
NASA is another Locata user, working with the Federal Aviation Administration on research for next-generation air traffic control. Numerous other applications are currently in stealth development.
Gambale said the company’s technology is not representative of a solution just for ports, mines, aviation, military or any other specific application. “Our ground-based technology has myriad advantages in the many environments where satellite-based positioning was never designed to work. We can change the game for many modern applications because Locata allows users to have total control over where transmitters are placed, the power they transmit, the design of their network structure, and much more.”
For more than 10 years, the company worked to develop technology to reduce multipath — the bane of high-accuracy GNSS positioning in urban, industrial, indoor and occluded areas.
“Those are all real-world environments where satellite-based signals cannot be tracked reliably enough for next-gen, extremely demanding applications like fully-autonomous operations,” Gambale said. “Our business is the direct result of GPS changing the world, and the industry then fueling a largely unqualified public expectation that centimeter-level positioning would be available everywhere. Clearly, that is not correct.
“The growing roster of huge, globally significant companies adopting our technology for applications that go beyond GPS limitations shows our developments deliver real benefits to many markets. Auckland is living proof that Locata is a true, terrestrial, centimeter-accurate alternative-PNT system.”
The UAV market has been growing rapidly for the past several years, especially in the U.S. with the Federal Aviation Administration (FAA) Part 107 regulations becoming active in August 2016. Before then, it was impossible to tell what systems were real and would weather the marketplace, and which were just a dream. Multicopters dominate the marketplace. (DJI’s M600 — out since 2016 — offers a 1–6-kilogram payload option). In late 2019, InnoFlight introduced the Galaxy 950 unmanned helicopter, a single-rotor platform capable of carrying more than 6 kilograms. It is available with battery power only, providing flights under an hour, but soon will support a gas-driven option for flights exceeding 2 hours. The system can be ready to deploy in less than 10 minutes.
Lidar USA provides a range of available lidar systems weighing about 5 kilograms, which work well with heavy-lift systems such as the Galaxy 950. In 2019, the Optech CL-90 was released; later the same year, the CL-360 hit the market. Lidar USA integrated each scanner into its product family and immediately saw the possibilities with the Galaxy 950.
The Lidar USA CL-series, together with the Galaxy 950, easily falls in the under-55-pound category set by the FAA. This means users can tackle small (5-acre) and large (500- to 5,000-acre) mapping jobs with confidence in their drone platform, the quality of the scan data, and the resulting lidar point cloud. The Galaxy 950 can easily support the CL-series with supporting cameras. The Optech CL-series provides survey-grade lidar accurate data: +/– 0.01 foot from a car on a paved surface. The system can operate from 400 feet with scan lines every inch at speeds of 14 mph (6.3 m/s). Of course, not all pulses make it to the ground due to vegetation, but the Optech CL-series provides up to four echos per pulse with a small beam size of 0.3 milliradians. Depending on the clipping angle, the scan width can range upwards of 1,200 feet, equating to about 34 acres per minute along a corridor. This system provides the surveyor with high-quality, accurate and dense lidar data.
The ability to capture and evaluate truth on the ground through aerial imagery is an ever-growing industry, thanks to the proliferation of UAVs and access to imagery on demand and online. Yet obstacles remain that could prevent organizations from capturing location intelligence.
For organizations that require timely, accurate and current aerial imagery, an additional capture program outside of drones could be necessary. One company, Nearmap, flies fixed-wing aircraft two to three times per year over 430 urban areas across the United States. Using proprietary camera technology, Nearmap captures aerial data in a variety of formats: vertical, oblique and 3D. The location content is then delivered to customers via a web browser application and can be easily integrated into GIS/CAD applications.
A mid-size tech company in New Mexico using a drone to capture digital surface model data ran into two obstacles: proximity to no-fly zones at Albuquerque International Airport and need for image consistency over an entire metro area. With a project due date looming, the company turned to Nearmap, which provided the necessary image data around the airport, as well as historical imagery. With the Nearmap data, the company was able to speed project planning from design to project completion.
Nearmap aerial imagery also provides data at scale (an entire city, not one city block). The clarity of the imagery is 2.8-inch ground sample distance, providing optimal data for seeing truth on the ground.
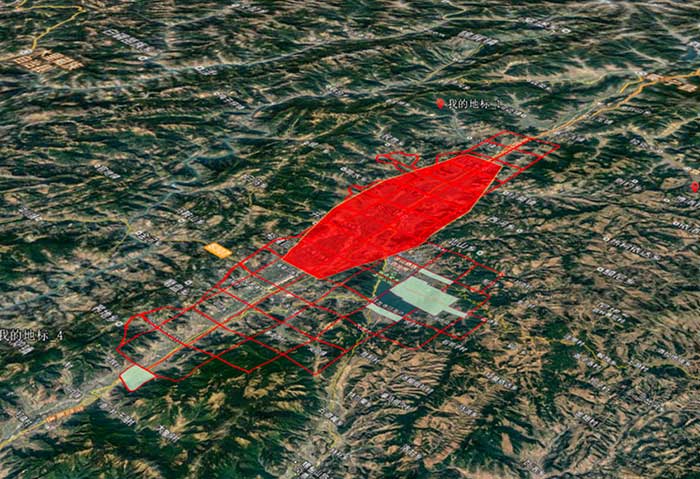
The CHCNAV P330 vertical takeoff and landing (VTOL) UAV has been deployed to complete orthophoto acquisition with a resolution of 15–20 centimeters of the city of Xichang in the Sichuan Province, China. The project involved a series of technical and operating challenges: several no-fly zones, a 700-meter flight ceiling by airspace control, tricky winds, and a total area of 900 square kilometers — all within a tight schedule.
The project involved 15 people, a fleet of four P330s and the set up of 200 ground control points.
The hybrid P330 was selected for its ability to combine the advantages of a fixed-wing UAV with extended flight time with a rotor-based VTOL UAV, which enables aerial survey missions on complex terrain.
Project area. (Photo: CHC Navigation)
Each P330s was fitted with a Sony A7R2 camera and high-accuracy GNSS positioning system. Because of its innovative design, the P330 can be assembled in less than five minutes without tools, saving the survey crew considerable time. Plus, basic operation training was completed in 2 hours.
The P330 also has one-click take-off and landing, support for breakpoint flight resuming after temporary return to base, and self-diagnostic of all sensors before take off. It has dual-rotor and parachute protection in case of emergency landing.
Other features include take-off and landing positioning accuracy within 20 centimeters and automatic return to base in case of a data communication failure. It offers survey-grade PPK accuracy.
The P330’s battery life lasts up to 2.5 hours. It will operate safely under Class 5 wind conditions at an altitude up to 4,000 meters, providing stable attitude under bad weather conditions. It also meets imaging constraints under low-light conditions.
The ASTRALiTe Edge is a small-scale topographic and bathymetric scanning lidar that can detect underwater objects, measure shallow water depth and survey critical underwater infrastructure from a small UAV platform.
The patented 2-in-1 topo-bathy Edge can see beneath the water surface at depths of 0–10 meters. It is self-contained with its own INS/GNSS, battery and onboard computer. It weighs under 5 kilograms and is designed for deployment on UAV systems for faster, safer and more accurate bathymetric surveys. From coastal mapping and surveying to infrastructure inspection and military logistics, the applications of this innovative lidar are numerous and widespread.
Geo-Referencing Solution. ASTRALiTe needed a motion and navigation solution for its cutting-edge lidar. “Our requirements included high accuracy along with low size, weight and power,” explained Andy Gisler, director of Lidar Systems. Also, the system needed to be able to apply a PPK correction to the lidar data to provide higher accuracy results to ASTRALiTe’s customers.
Photo: SBG Systems
The company chose the new Quanta georeferencing solution from SBG Systems, an INS designed to be integrated into mobile mapping systems. “The weight of the INS solution was especially important to us,” Gisler said. The Edge scanner will be flown on UAVs, where light payload capacities are required. “The ability to use two GPS antennas was key in our choice as we required good heading knowledge at slow flight speeds,” Gisler said.
Quanta directly and precisely geotags the point cloud in real time and provides even higher performance in post-processing. One year of post-processing with Qinertia, SBG’s in-house PPK software, is offered for UAV applications.
“Accurate and lightweight IMU performance leads to high accuracy lidar point clouds,” Gisler said. “Combined with the ASTRALiTe scanner and lidar performance, point clouds with typical densities of 100-300 pts/m2 and centimeter-level resolution can be achieved.”
Two companies have integrated GPS/PNT tech into a growing autonomous vehicle market: driverless shuttles for retirement communities. Powering the service, a cloud-based GNSS corrections system delivers centimeter-level accuracy without deploying and maintaining a GNSS network. This leading-edge application targets autonomy at scale and enables high-precision positioning for mass-market automotive and autonomous vehicle applications.
Photo: Voyage
For many seniors, retirement communities offer the best of both worlds: the freedom to live in their own homes and access to immediate assistance when they need it.
Driverless cars are an option several retirement communities have embraced to better serve residents who no longer have the ability or desire to drive, but want to retain the ability to come and go as they please.
“Autonomous vehicles are a great fit for any community where the environment is well-understood, less complex than dense urban areas, and the transportation demand is high,” said Justin Erlich, vice president of strategy, policy and legal for Palo Alto, California-based Voyage, a company that employs existing technology to develop fleets of autonomous vehicles. “Retirement communities satisfy all of these characteristics.”
Serving Seniors
Voyage deployed driverless shuttles to serve 130,000 retirees at The Villages, a massive retirement community encompassing more than 50 square miles in Sumter County, Florida.
“The community’s residents enjoy an extremely active lifestyle, but often face challenges getting around,” Erlich said. “Autonomous vehicles are perfectly suited to meet this demand.”
The six vehicles in the fleet stay within the confines of the retirement community, where all roads have been precisely mapped, speed limits are lower and traffic patterns are more clearly defined than in a typical city. The vehicles travel over a network of roads that span 750 miles.
THE VILLAGES
Location: Sumter County, Florida Area: 50 square miles Road span: 750 miles Number of retiree residents: More than 130,000 Number of Voyage autonomous vehicles: 6
To request one of Voyage’s autonomous vehicles, a resident can summon the shuttle on-demand with a smartphone. Voyage is working with residents on the possibility of using other shuttle-request options, including text messages, phone calls and well-marked pickup zones in crowded downtown areas, Erlich said.
All passengers ride with Voyage safety drivers in the front seat. The drivers take note of any “events” during rides so Voyage can investigate how to improve the riding experience.
Photo: Voyage
Eventually, residents will be the only passengers in the vehicles. If they need assistance during a ride, they will be able to communicate with remotely located Voyage employees, Erlich said.
Testing and rolling out fleets of driverless vehicles in private communities like The Villages allows Voyage to develop and perfect the autonomous vehicle technology it uses. As a result, the company can deliver the service to new clients in mere months.
Voyage, which has been working on its autonomous technology for more than two years, uses daily customer feedback to constantly adjust to its technologies to better serve riders.
“Feedback collected during test drives is one of the biggest factors in shaping our technology roadmap,” Erlich said. “Driving data — collected across all sensors and traffic scenarios — is automatically processed each night, highlighting interesting ‘events’ for our engineering team to analyze and review.”
During Voyage’s beta test process at The Villages, residents applied to be part of the company’s Pioneer Program for early access to the autonomous vehicles and the ability to offer feedback early on. Riders who test the service complete scorecards after each trip to help improve the experience for all riders.
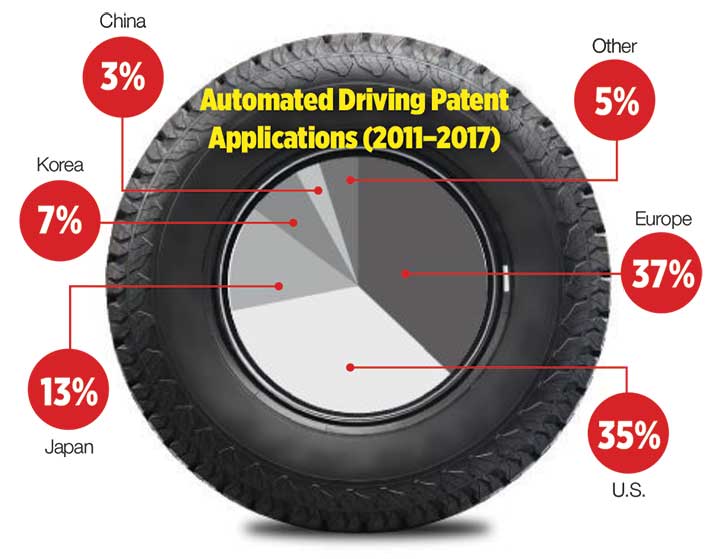
Europe Takes the Lead
(Tire photo: iStock.com / TANAPHONG)
Autonomous vehicle technology is taking off in Europe, shows a study published by the European Patent Office and conducted with the European Council for Automotive Research & Development. From 2011 to 2017, European patent applications related to automated driving increased 20 times faster than other technologies in recent years. The “Patents and self-driving vehicles” study reveals automated driving patent applications at the European Patent Office rose 330%, compared with 16% for all technologies during the same time.
“As one of the only self-driving car companies that are picking up actual passengers as a part of our Pioneer Program, we believe we can learn a lot from the feedback we hear from our initial Pioneer riders as we try to make this the best service for The Villages,” said Oliver Cameron, co-founder and CEO of Voyage. “We are excited to see so much interest from other residents to become a part of this program.”
When developing autonomous technology, safety is Voyage’s top priority, Erlich said. Every change to the hardware and software used undergoes a multi-stage validation process. Company engineers perform “on-desk” tests of every change using unit tests, functional tests and a driving simulation environment. Then, an operations team runs suites of real-world traffic and validation tests in a completely controlled environment at a closed-course testing facility in San Jose, California
“Voyage makes extensive use of simulation testing and closed-course validation before any of our vehicles are driven in our partner communities,” Erlich said. “All changes must pass these closed-course tests before making their way onto the roads of our partner communities.”
Vehicle design also ensures riders stay safe. “Our fleet vehicles have been designed with multiple levels of safety redundancies for braking, steering and power, and leverage an advanced diagnostics system to automatically detect anomalies and safely stop the vehicle,” he explained. “In addition, we have developed a remote teleoperations solution that allows the vehicle to request additional help when a driver is not physically in the vehicle.”
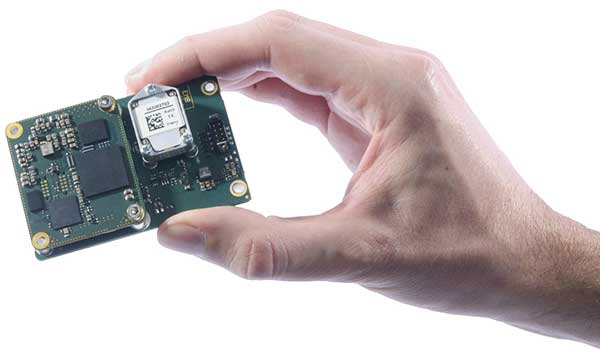
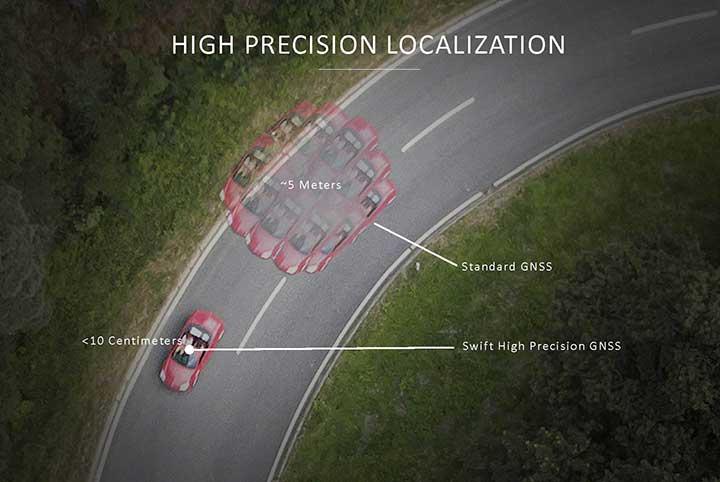
Skylark provides high-precision localization. (Image: Swift Navigation)
Making Autonomous Work
When building an autonomous system, localization — knowing exactly where you are in the world — is critical. Erlich said it’s often difficult to estimate your position within an accuracy of several feet when using more traditional GPS solutions.
“For autonomous driving, you need to be able to estimate within several centimeters,” he added.
Voyage uses Swift Navigation’s GNSS receivers and Skylark network as one of the primary inputs into its localization solution.
Swift Navigation is a San Francisco-based tech firm that develops GPS technology to power autonomous vehicles. It is working to extend the Skylark network across the contiguous United States, and then plans to expand globally.
“Coupled with high-definition maps, odometry sensors and other inputs, we’ve been able to use Swift Navigation’s differential GPS solution to achieve the localization results we needed to deliver a true autonomous driving service,” Erlich said.
Voyage’s autonomous vehicles are equipped with a suite of sensors on their roof racks that includes the Swift Navigation Piksi Multi GNSS receiver, lidar devices, cameras, radar and an inertial measurement unit. They create and constantly update a 3D map of the vehicle’s surroundings.
Swift Navigation’s Duro is one of two GNSS receivers Voyage uses for its autonomous vehicles. (Photo: Swift Navigation)
A computer in the trunk integrates all sensor signals and uses the vehicle’s Controller Area Network (CAN) bus to operate steering, braking and other functions.
Skylark, Swift Navigation’s cloud-based GNSS corrections service, provides Voyage’s autonomous vehicles with precise positioning to eliminate the complexity of deploying and maintaining GNSS networks.
Skylark offers a plug-and-play experience that delivers convergence times measured in seconds. Its positioning algorithms provide a continuous data stream to individual devices from the cloud. This data stream allows for quick positioning and high reliability and availability.
The correction service enables receivers to connect to a constantly adapting, cloud-based model to obtain GNSS observations. Dependence on base stations in each area of deployment is eliminated, increasing the geographic area in which they can travel. Skylark works seamlessly with both of Swift Navigation’s GNSS receivers — Piksi Multi and Duro.
In addition to Piksi Multi and Duro, Voyage uses third-party receivers and microprocessors that benefit from the lane-level positioning Skylark delivers.
Equipment Specs
Photo: Swift Navigation
GNSS receiver one. Swift Navigation — Piksi Multi
• Dual-frequency and multi-constellation
• Up to 20-Hz solution rates
• Raw data outputs from on-board MEMS IMU GNSS receiver two. Swift Navigation — Duro
• IP67 rated
• Centimeter-level positioning
• Raw data outputs from on-board MEMS IMU Lidar devices. Velodyne — VLS-128
• 128 channels
• Up to 300-meter range
• Up to 360-degree surround view Cameras. iDS — Global-Shutter units Proximity sensors. Chrysler OEM Inertial measurement unit. Xsens — MTi-300
• 375-Hz bandwith for accelerometers
• 415-Hz bandwith for gyroscopes Antenna. Swift Navigation — Mini-survey for the Duro RTK unit
• 1 L1/L2 GPS/GLONASS/BeiDou mini-survey
The Swift product suite delivers centimeter-level localization —important to riders who may have mobility issues that require vehicles with smooth starts and stops.
Skylark was built specifically to deliver the speed, security, precision and reliability demanded by automotive manufacturers with autonomous and safety applications architected to support ASIL-rated (Automotive Safety Integrity Level) systems.
Because Skylark is a network, it is fault tolerant. In the unlikely event an individual cloud reference station goes offline, Skylark’s positioning algorithms will continue to provide a continuous stream of corrections.
Once connected, Skylark creates a precise and constantly adapting model of the atmosphere and related errors affecting GNSS. Connected users simply turn on their devices to get the precise positioning data they need.
Safety Drivers
As drivers get older, their mental and physical health can affect their ability to operate vehicles safely. Vision and hearing loss keep many older drivers off the road. Fear of driving at night or in the rain also can be a problem for older drivers. According to the Centers for Disease Control and Prevention (CDC), about 7,400 adults over the age of 65 died as a result of car accidents in 2016. That same year, more than 290,000 of adults over the age of 65 were treated in emergency departments for injuries sustained in motor vehicle accidents.
Residents at The Villages who have used the autonomous vehicles report positive feedback, Erlich said. They consider the service a major improvement to their day-to-day activities because it’s convenient. Plus, they prefer the ability to be more carefree during happy hour, fewer hassles with traffic and parking, and lack of interactions with poor drivers.
Being on the cutting-edge of a generational technology also is a positive for many residents, Erlich said. “Autonomous vehicles create a clear path to safer, more accessible, and reliable transportation for everyone. From a safety perspective, autonomous vehicles have the potential to significantly reduce the more than 37,000 deaths attributed each year to driving. From a lifestyle perspective, there are also huge opportunities: from reclaiming daily commute time, to providing a reliable means of transportation to people with mobility challenges.”
Positioning Intelligence Key to Autonomous
Hexagon’s Positioning Intelligence (PI) division is an integral partner in many autonomous vehicle development projects, providing technologies such as SPAN (GNSS+INS technology), TerraStar-X corrections, and Automated Research and Development Platforms from its brands including NovAtel, VERIPOS and AutonomouStuff.
NovAtel hardware and software products, along with engineering support, address the need for accurate, reliable and robust GNSS positioning. TerraStar-X correction services deliver worldwide coverage and assured positioning with continuous availability, and provide the accuracy and rapid convergence needed to achieve lane-level precision for safe autonomous operation.
For developers of autonomous consumer transportation, integrated research and development automotive platforms from AutonomouStuff accelerate time to market.
Making It Safe. For large-scale automotive production, safety is the main focus. The Hexagon PI software positioning engine and TerraStar-X technology are being developed to ASIL-B (Automotive Safety Integrity Level B) standards to provide precise positioning for lane-level performance in autonomous applications.
Image: Trimble
Road Corrections
Incorporating precise and consistent absolute location information is an essential component of enabling advanced driver assistance (ADAS) and autonomous driving (AD) technology for vehicles.
To help meet this need, Trimble recently released Trimble RTX Auto. The Trimble RTX Auto correction service provides a precise point position (PPP) solution that can be used to correct the position of any auto grade GNSS chipset. RTX Auto works in parallel with other on-vehicle sensors to deliver a positioning solution that satisfies ADAS and AD requirements.
Absolute position contributes to many features:
Lane centering. Systems designed to keep a car centered in a lane, relieving the driver of the task of steering, is often achieved with cameras and absolute position data. Absolute position can be used when lines disappear, or weather prevents them from being seen.
Map aiding. a combination of precise map and location data helps to navigate junctions, lane changes, roundabouts or intersections where lane information is essential to safe driving.
Prediction of future road structure. Both allow a vehicle to begin slowing in advance of a bend in the road and to avoid harsh braking that would happen if the system only relied on short range sensors.
Adhering to the speed limit. This helps drivers anticipate changes in speed limits when a downpour prevents cameras from seeing the speed limit signs or when they might be obscured by natural surroundings or another vehicle.
RTX Auto is both Automotive Safety Integrity Level (ASIL) and Automotive Software Process Improvement and Capability Determination (ASPICE) certified. These certifications validate that Trimble RTX Auto meets functional safety requirements for ADAS and autonomous applications in the auto industry.
Super Cruising. Trimble is on the road today providing RTX-based absolute positioning within General Motors’ Super Cruise driver assistance feature, a hands-free driving system for the freeway. For more information on Super Cruise, visit www.cadillac.com/world-of-cadillac/innovation/super-cruise.