As we approach the holidays and if I get tired of writing about weighty scientific, technical and policy issues, I might apply for a copywriting position at Hallmark Cards. But for now we begin to think concretely about the coming year. In fact, due to our production timelines, as you are reading this issue we are busy completing the January one. So, what can you expect to see in these pages in 2025?
First, more of the same… excellent content. Our cover stories will continue to bring you case studies from key GNSS application areas based on interviews with equipment manufacturers and end users. Our secondary features will cover bathymetric surveying; GNSS/PNT applications for consumers, science and business; autonomous vehicles; and indoor mapping. Our System of Systems section will continue to keep you informed about developments in GNSS, other PNT, and space exploration around the world. Our guest columnists — including Lisa Dyer of the GPS Innovation Alliance and Dana Goward of the Resilient Navigation and Timing Foundation — will continue to bring you their valuable perspectives. Our annual Directions section will continue to provide updates on all four GNSS and the regional constellations.
Launchpad will continue to showcase the latest product releases and Market Watch will continue to bring you a roundup of timely industry news. Our buyers guides will continue to provide a handy reference to who makes what. Our Mapping Marvel, Research Roundup and Seen & Heard sections will continue to bring you beautiful and interesting maps, summaries of scholarly articles, and glimpses of interesting and amusing GNSS/PNT applications around the world, respectively.
Our Authoritative Reference section will feature an article on the GPS budget, an update to “Who Runs GPS?” (see the February 2023 issue), an almanac of GNSS satellites and signals, and a survey of augmentation and corrections services. Our Inside the Box occasional section will explain the workings of different aspects of GNSS/PNT technology.
Following Richard Langley’s fantastic 35-year run with his great Innovation column — if you missed it, see his last one, and a celebration of his work, in the November issue — the February issue will launch a new quarterly technical column and its editor (and, sometimes, author). Many of you will start guessing who this person is and the new column’s name… but my lips are sealed until then.
I will engage our Editorial Advisory Board in more in-depth discussions of technical and policy issues and ask some of its members to write full articles. I will expand our coverage of low-Earth orbit (LEO) PNT and corrections services and introduce new content categories — such as legal issues, the consumer market and book reviews.
I am looking for new authors, including a Washington correspondent, to report on relevant budget negotiations, legislation and policy discussions; a surveyor to report from the field about new equipment, techniques and challenges; a technology writer to cover the growth in LEO PNT constellations and other types of complementary PNT and one to cover developments in the consumer market.
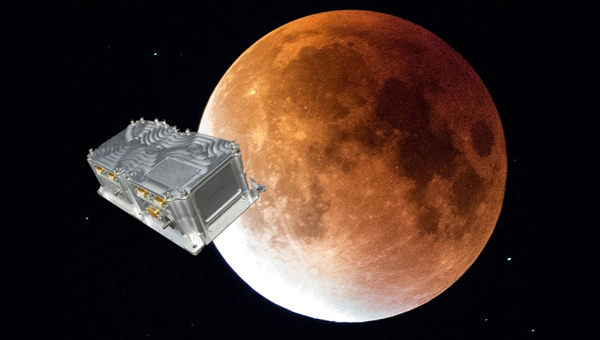
SpacePNT and European Engineering and Consultancy (EECL) delivered the final presentation of the European Space Agency (ESA)-funded project, “Earth Moon GNSS Spaceborne Receiver for In-Orbit Demonstration.” This project aims to develop the NaviMoon GNSS receiver for lunar applications. (Photo: SpacePNT)
GNSS researchers presented hundreds of papers at the 2024 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 16-20 in Baltimore. The following papers focused on lunar and space applications. The papers are available here.
Clock and Orbit Determination for LEO Satellites
More than 50 years after the Apollo program, there is a growing interest in establishing a sustainable human presence on the moon, with various missions being planned in different lunar orbit regimes to support lunar exploration. To address the challenges of navigation in the lunar environment, researchers have proposed a technique leveraging time-differenced carrier-phase (TDCP) measurements from GPS satellites, which offer millimeter-level accuracy when integer ambiguities are correctly fixed.
The proposed framework utilizes an extended Kalman filter that combines intermittently available terrestrial GPS TDCP values with gravitational accelerations predicted by an orbital filter. To handle the unique challenges of the lunar environment, such as weak gravity and strong third-body perturbations, the researchers implement an adaptive state noise compensation algorithm and introduce an augmented state vector to address time correlations across TDCP measurements. Through Monte Carlo simulations of lunar satellites in various orbits, the technique demonstrates improved positioning and onboard timing accuracy compared to pseudorange-only navigation solutions.
Keidai Iiyama, Sriramya Bhamidipati and Grace Gao, “Precise Positioning and Timekeeping in a Lunar Orbit via Terrestrial GPS Time-Differenced Carrier-Phase Measurements.”
Satellite Ephemeris Parameterization for Lunar Navigation
This paper explores the development of satellite ephemeris parameterization methods for lunar navigation systems. As space agencies plan to establish satellite networks around the moon for communication and positioning, navigation and timing (PNT) services, the authors investigate optimal techniques for efficiently and accurately broadcasting satellite ephemeris data to lunar users. They propose a framework that directly approximates satellite position and velocity in the inertial frame, using signal-in-space-error requirements as constraints to guide the search for the best ephemeris parameter set.
The study evaluates different methods based on ephemeris prediction precision, fit interval and message size. It demonstrates the framework’s ability to approximate satellite ephemeris for both low lunar orbits and elliptical lunar frozen orbits while meeting signal-in-space-error requirements. The research considers polynomial and Chebyshev basis types for surrogate models and evaluates performance based on precision and orbital coverage. By quantifying the broadcast message’s fit interval and size, the authors aim to guide the selection of optimal parameterization methodologies for lunar navigation systems.
Marta Cortinovis, Keidai Iiyama and Grace Gao, “Open Access Satellite Ephemeris Parameterization Methods to Support Lunar Positioning, Navigation, and Timing Services.”
Improving Navigation Accuracy in GEO
The authors introduce a new approach to improving the accuracy of satellite position determination in geostationary equatorial orbit (GEO). They propose integrating a regional navigation satellite system (RNSS) with GNSS. Specifically, they suggest using RNSS signals, such as those from the Quasi-Zenith Satellite System (QZSS), to complement the signals provided by GNSS for GEO satellites.
The research addresses the challenges faced by GEO satellites in using GNSS signals, including poor dilution of precision (DOP) and significant radial errors due to limited observability. By incorporating RNSS signals, the researchers aim to improve the diversity of signal directions and enhance navigation precision. The paper demonstrates the feasibility of receiving QZSS signals across a substantial range in GEO through link budget analyses. Two comprehensive simulations were conducted: a point solution and an extended Kalman filter-based orbit determination. The results confirm the anticipated improvement in navigation precision indicated by the DOP analysis.
While RNSS signals can be received from any longitude in GEO, enhanced navigation precision depends on the distance between the satellite and the RNSS. The authors suggest that this concept can be adapted to various longitudes within GEO by selecting appropriate RNSS options and promoting stable, high-precision navigation.
Yu Nakajima and Toru Yamamoto, “Enhancing Navigation Accuracy in a Geostationary Orbit by Utilizing a Regional Navigation Satellite System.”
Integrating Orbit and Attitude Precision for CubeSat Positioning
This research paper addresses ways to enhance CubeSat capabilities for demanding missions, particularly in low Earth orbiting positioning, navigation and timing (LEO-PNT) systems. The authors propose an array-aided combined precise orbit and attitude determination model that offers an optimal solution to improve orbital accuracy and provide reliable attitude information. By utilizing multi- and affine-constrained models for precise attitude determination and reconstructing highly precise observations for an antenna array, the method addresses the challenges of higher orbital accuracy and reliable attitude information required for advanced applications.
The authors recorded significant improvements in orbital accuracy and attitude determination. Validation results show that reconstructed observations outperform original ones, leading to improved orbital components with a three-dimensional root mean square (RMS) of 4.1 cm. Additionally, observation residuals are smoother, with an RMS of 6 mm, half of that obtained via a single antenna. The results show a promising solution for enhancing CubeSat capabilities, particularly for applications requiring high-precision orbit and attitude information.
Amir Allahvirdi-Zadeh and Ahmed El-Mowafy, “Array-Aided Precise Orbit and Attitude Determination of CubeSats using GNSS.”
In 2024, we witnessed emerging trends, challenges and opportunities that significantly impacted the GNSS/PNT industry, ranging from advancements in surveying technology to ways to combat the increasing threats of jamming and spoofing. In this year in review, we highlight notable stories from 2024.
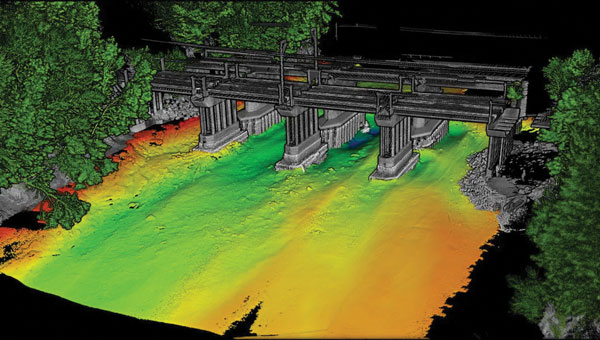
This article discussed advancements in bathymetric surveying techniques, highlighting three projects — from SBG Systems, CHC Navigation (CHCNAV) and Advanced Navigation — that are charting underwater environments. It showcased the exploration of the Great Blue Hole in Belize using submarine-mounted sonar, creating a digital twin flood model for China’s Yellow River using unmanned surface vehicles (USVs) and UAVs and the development of an autonomous vessel for surveying wet gaps in military operations.
February
Aligning the trades: GNSS for architecture, engineering and construction
Surveying is an ongoing process on construction sites. Surveyors are the first on the site before any other work begins and the last ones there to map the project “as built.” Total stations with GNSS receivers, tablets and other mobile digital devices are their essential tools, increasingly complemented by UAVs and lidar scanners. In this story on architecture, engineering and construction (AEC), we highlighted three building projects — from ComNav Technology, CHCNAV and Eos Positioning Systems — as well as photos from Juniper Systems.
Photo: Safran Federal Systems
March
2024 GPS World simulator buyers guide
In our 13th annual Simulator Buyers Guide, we featured simulator tools, devices and software from nine prominent companies that aid GNSS receiver manufacturers in product design.
April
L5-first for improved resilience in mass market GNSS
Paul McBurney, co-founder and CEO of oneNav, emphasized the advantages of L5-first GNSS receivers in enhancing resilience against GNSS interference and jamming in mass market applications. He shared how traditional receivers prioritize L1 signals, limiting their effectiveness in high-interference environments, while L5 signals, which have a higher chipping rate and power, can improve jamming resistance by up to 15 dB. The article advocated for the development of L5-first systems to boost GNSS resilience, particularly for critical infrastructure, although challenges such as acquisition complexity and cost must be addressed before widespread adoption.
May
(Photo: CAST Navigation)
Combating jamming and spoofing: PNT on the battlefield
Jamming and spoofing continue to be the key challenges to military use of GNSS. While the production and adoption of M-Code receivers is delayed, defense contractors are developing several approaches to identify, locate and neutralize these threats — including CRPA antennas, embedded GPS inertial (EGI) navigators, software-defined radios and cryptography. In this cover story, executives from seven companies presented their perspectives on the GNSS/PNT challenges faced by U.S. and allied military forces, their market niche in this area and their latest products.
June
NextNav petitions FCC for new spectrum band
NextNav’s petition to the FCC seeks to reconfigure the 902-928 MHz band for a new terrestrial positioning, navigation and timing (TPNT) service. This service aims to complement GPS, enhancing location reliability in urban areas. The integration with 5G technology could further improve positioning services. However, the petition has raised significant concerns within the GNSS industry. Industry leaders argue that granting NextNav access to this spectrum could disrupt existing technologies that rely on the same band. The proposed higher power levels could lead to interference, jeopardizing the operational reliability of various sectors, including supply chains and healthcare. The Federal Communications Commission (FCC) has received more than 1,700 comments highlighting concerns about harmful interference and calling for careful evaluation before any regulatory changes are made. The outcome of this petition could significantly influence the future landscape of positioning technologies in the United States, affecting both GNSS capabilities and the viability of critical applications that depend on current spectrum usage.
July
PNT without GNSS
For the fourth year in a row, the topic for our July cover story was complementary positioning, navigation and timing (PNT). The ongoing challenges of combating jamming and spoofing, as well as enhancing resilience in PNT systems, have been prominent themes in our articles and industry throughout 2024. The U.S. National Space-Based Positioning, Navigation and Timing Advisory Board has been actively working on strategies to “protect, toughen and augment” GPS. The term “augment” refers to enhancements made to GPS and the integration of complementary PNT sources that can partially or fully replace GPS. For this cover story, Editor-in-Chief Matteo Luccio interviewed executives from four companies that design, produce and operate various complementary PNT technologies, highlighting their diverse approaches to this challenge.
Genesis satellite.
August
Innovation: ESA’s Multi-Modal space mission to improve geodetic applications
The European Space Agency (ESA) has established the Genesis mission, a groundbreaking space project that will collocate four space-based geodetic techniques — GNSS, VLBI, SLR and DORIS — on a single satellite for the first time. This mission aims to improve the accuracy and stability of the International Terrestrial Reference Frame (ITRF) to 1 millimeter with long-term stability of 0.1 mm per year, which is crucial for detecting small variations in Earth’s solid, fluid and gaseous components. The Genesis satellite, set to launch in 2028, will orbit at an altitude of about 6,000 km with an inclination of 95° and will operate for at least two years. Members of the Genesis mission team shared how it has the potential to significantly impact various GNSS and Earth observation applications by improving geodetic and geophysical observations, as well as enhancing precise navigation and positioning capabilities.
(Photo courtesy of ION)
September
ION GNSS+ 2024
ION GNSS+ 2024, held Sept. 16-20 at the Hilton Baltimore Inner Harbor, showcased more than 400 technical presentations spanning six sectors. GPS World had the opportunity to engage in a series of discussions and panels, including a plenary session with a presentation on a space project and one on circumnavigating the globe in a sailboat using only paper charts, a compass and a sextant to navigate.
INTERGEO 2024
The GPS World team touched down in Stuttgart, Germany, for INTERGEO 2024, held from Sept. 24-26. This year’s expo and conference showcased solutions to address critical global issues such as GNSS jamming and spoofing. GPS World Publisher Brian Kanaba and Account Manager Tim Carolin made their debut at the show, joining show veteran Editor-in-Chief Matteo Luccio. The show attracted more than 17,000 visitors from 121 countries and featured 579 exhibitors.
October
Lidar helps unlock secrets in Amelia Earhart mystery
The October edition of “Mapping Marvel” focused on research conducted for The Discovery Channel’s documentary, “Finding Amelia.” This film explores the latest expedition aimed at uncovering the mysterious fate of Amelia Earhart. It featured contributions from SPH Engineering and investigated the theory that Earhart and her navigator, Fred Noonan, may have crashed in Papua New Guinea during their 1937 attempt to circumnavigate the globe.
The team utilized lidar technology to conduct low-altitude flights that produced detailed maps of the ground beneath the dense jungle. This approach revealed potential hidden features, including Japanese troop trails and a structure resembling Earhart’s Lockheed Electra.
November
Richard Langley
The last one: A look back at 35 years of ‘Innovation’
The November 2024 issue of GPS World featured Professor Richard Langley’s 300th and final “Innovation” column. His first one appeared in the January/February 1990 issue, the magazine’s very first. In celebration of Richard’s decades-long contribution to GPS / GNSS / PNT, we published a selection of testimonials and photos from some of his colleagues and friends, gathered by his former students Sunil Bisnath and Attila Komjathy.
December
Directions 2024: GNSS constellation updates
This year’s “Directions” feature offers updates on all four GNSS constellations and a regional one. Representatives from each program — BeiDou, GPS, Galileo, GLONASS and QZSS — reflect on the year’s developments, sharing how PNT technologies aim to enhance both defense and civilian applications, ultimately improving navigation capabilities worldwide. The feature highlights significant milestones, including the modernization efforts within each constellation.
Transportation continues to be a key application area for GNSS and related technologies — both directly, as with receivers on trains, and indirectly, as in airport construction. For this month’s cover story, I chose three transportation-related projects that showcase different aspects of this relationship:
The project to triple the size of the international airport in Lima, Peru, and transform it into the Jorge Chávez Airport City. I posed a few questions to Carlos Ruiz Miranda, chief surveyor at the Lima airport project with SACYR, a Madrid-based global concessions, engineering and infrastructure and services company that specializes in large-scale infrastructure projects.
A train safety project in Vélizy, France. I talked with Joel Korsakissok, president of Syntony GNSS, a French company, which partnered for this project with Hitachi Rail, a global company headquartered in London.
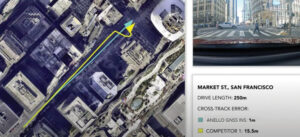
A navigation test on San Francisco’s Market Street using an INS-GNSS integration from ANELLO Photonics, which specializes in silicon photonics and sensory technology. I spoke to Kirstin Schauble, Ph.D., director of systems engineering.
Trimble: Peru builds South America’s first airport city
A construction worker at Lima’s airport uses a Trimble GNSS receiver and a TSC7 controller. Requirements included precisely positioning the bolts for more than 700 seismic isolators. (Photo: Trimble)
On April 3, 2023, the first commercial plane took off from a new 2.2 mile-long runway at the Jorge Chávez International Airport, in Lima, Peru, headed for Tarapoto with 140 passengers. That same day, a Peruvian Air Force jet was the first aircraft to land on the runway. Both aircraft were monitored from a new 213 ft.-high control tower with a 360° view of the airport.
The new infrastructure is part of a larger $2 billion project to triple the size of the airport, turning it into Jorge Chávez Airport City. Additionally, third-party investment for the construction will exceed $400 million in the first phase. The continent’s first such venture, it will enable Peru to become one of its principal aviation hubs. Spanning 2,310 acres, in addition to the new runway and control tower, it includes a 67-acre passenger terminal designed to handle about 40 million passengers a year.
Construction began in January 2022, and the expanded airport is scheduled to open in January 2025. It is a joint project of Lima Airport Partners — which operates more than 30 airports around the world — the Peruvian Ministry of Transportation and Communications, the Peruvian Airports and Commercial Aviation Corporation, and the aviation community in general, under the supervision of Ositran.
The modernization project’s scope and scale are matched by the means and methods used to build it. They include advanced surveying, grade control and coordination techniques in the field and about 2,700 active building information models (BIM) containing more than 50 miles of utilities that multiple contractors will construct. To fully synchronize the digital workflow between the field and the office, Ruiz led the transition from cloud-based collaboration software to a digital workflow. This improved coordination and productivity across departments and helped to keep the project on track.
The transition began by implementing a cloud-based common data environment (CDE), using Trimble Connect to provide a real-time, centralized collaboration platform for the construction crew, the field surveyors and the project’s managers. The CDE became a hub for managing data from field solutions, including laser scanners, UAVs, grade control systems, total stations, GNSS receivers and machine control systems on heavy earthmoving equipment.
A critical part of the terminal expansion is the airside airplane parking area around the terminal, which requires about 70,000 cubic meters of concrete and asphalt. The systems developed by the construction team enable the paving crew to achieve 10 mm accuracy, well below the 18 mm requirements.
Given the number of elements to this project in the terminal and surrounding areas, the SACYR survey team found that one of the best ways to facilitate the data flow between the office and the field is to use augmented reality (AR). “Initially, we tried using paper printouts to manually check for issues in the field. We tried Google Earth, but that was not satisfactory,” said Ruiz. Instead, SACYR turned to Trimble’s SiteVision AR software to provide real-time visualization of data, which improved decision-making and planning and reduced errors and costs.
Nearly 20 Trimble solutions were used in this project (see the sidebar), which helped to synchronize communication between field and office during construction, provided high accuracy results, and improved visualization and collaboration with the customer.
An aerial image shows the new terminal at Lima’s airport under construction. It will be able to handle up to 40 million passengers a year. (Photo: Trimble)
I asked Ruiz a few questions about the GNSS part of the project.
Q: What were the key challenges in surveying for this airport expansion project? Given the nature of the project and its location, multipath was probably not a problem. Also, the new runway and control tower were built away from existing air traffic, so that presumably was not a problem either.
A: The challenge has been organizing workflows between the field and the office. The location was not an issue for the project, but the limited space between the existing runway and the new one was. Nevertheless, it was not really an issue for construction.
Q: The airport will be the first one in South America to have seismic isolators to allow it to serve humanitarian flights following an earthquake. Did that pose any special challenges for surveyors?
A: Yes, it was a challenge for surveyors because there are more than 700 seismic isolators, and they each have anchor bolts that have precise tolerances to be embedded in the concrete. For this they used Trimble total stations.
Q: Did this project have any special requirements?
A: Special requirements were the precision of the seismic isolators, the precision of the plumbness of the columns and beams, and the precision of the leveling of the concrete of the parking spaces and the asphalt for the aircraft.
Q: What total stations were used?
A: A S5 1 second with TDC600, software access, a UHF 35Watt GPS data radio, and different GNSS receiver models for the project.
Q: The airport expansion is part of Lima’s new airport city. How was surveying for the former tied into the latter?
A: The benchmark control points certified by the Peruvian IGN will be left in place and become part of the LAP airport geodetic network.
Autonomous railway track detection
Redundant ssm receiver installation inside a test train in France. (Photo: Hitachi Rail and Syntony GNSS)
Around the world, efforts are underway to increase the safety of rail transportation — both for passengers and for communities along rail lines that are vulnerable to derailments that can lead to spills of harmful chemicals. The most notable recent example of the latter in the United States was the derailment of 38 cars of a freight train in East Palestine, Ohio, in February 2023, which forced the evacuation of a 1-mile radius around the spill.
Hitachi Rail and Syntony GNSS are collaborating on a train safety project in Vélizy, France. Members of the Hitachi Rail team wrote a paper1 on the project that they presented at the Institute of Navigation’s GNSS+ 2024 conference in Baltimore in September 2024. “Everybody is now trying to locate trains with the highest possible Safety Integrity Level (SIL), which is SIL 4,” said Korsakissok, discussing the project. “The partnership between Hitachi Rail and Syntony aims to reach this level by the end of 2025.”
Many modern automatic train operation (ATO) systems — an advanced technology that enables trains to run automatically without the need for a human driver — provide real-time information to the train about its location, speed and other important operational parameters. They use small radio beacons placed along the railway track, typically every third of a mile to half a mile, and an onboard antenna to collect the data. The problem with this positioning system is that it has high installation and maintenance costs. Therefore, the use of GNSS is seen as a major step toward train autonomy. However, due to local disturbances (masking and multipath), classical GNSS positioning methods can be inaccurate by up to many meters, which does not meet railway safety requirements.
The Hitachi Rail safety project in Vélizy is part of a global next-generation train positioning architecture. It supplements a stand-alone GNSS positioning solution with a satellite signal map matching technique and derived integrity methods. It uses cold start for track detection and requires neither motion nor a priori knowledge of the train’s position. The GNSS receiver used in this project is from Syntony GNSS.
A satellite signal map matching (SSM) algorithm developed for this project, in combination with accurate maps, computes the correlation between the received GNSS signal and a predicted PRN code for a chosen satellite, chosen epochs and a known georeferenced point from the map. In the absence of any errors, the user’s antenna would be expected to be located at the georeferenced point. However, this matching is never perfect, so the technique evaluates its quality based on its degree of correlation and the observed delays. It then uses several consolidation methods that take advantage of the whole set of available satellites.
“This approach is well suited to the track detection case of railway navigation when no previous knowledge of the position is given (at train cold start), as the algorithm is detecting a known position, while most of the current GNSS algorithms are estimating a position,” write the authors of the ION paper on the project, who are all members of the Hitachi Rail innovation team in Vélizy.
“The receiver embedded in the train is based on Syntony’s ORION receiver platform,” Korsakissok said. “ORION is a hardware platform that includes a system-on-chip (SoC) from Xilinx, inside which we put a GNSS software-defined radio (SDR) receiver that tracks the GPS L1/L5 and Galileo E1/E5a signals.” For Hitachi, Korsakissok continued, Syntony added a “map matching” feature to the receiver, “which is done in an original (and patented) way: All along the rail tracks, we define some ‘points of interest’ (POI) and the objective of the SSM algorithm is to detect the probability of going over one POI at a given time. Obviously, if there is only one track, and if the train goes from one station to the next, we know that it will pass over this POI, and the only question is when. Inversely, if there are two or more tracks, the most important question is on which track the train is, to avoid any collision. In this case, we define a set of POI on each track, and the key is for our SSM algorithm to tell us which one the train passed.”
The autonomous location software (ALS) used for this project runs on an industrial-grade computer approved for railway usage. Running tests are done in a lab with an antenna located both on the roof of the team’s building in Vélizy and on the train. A grid map from true line tracks is used in both cases.
“To our knowledge,” Korsakissok explained, “almost all train operators that are locating trains with GNSS for positive train control (PTC) or for the European Rail Traffic Management System (ERTMS) are solving this problem by measuring the distance between the position computed by the receiver and all present tracks, then choosing the lower one as the most probable. This can work well if the train is moving and if a hybridization algorithm is used with an inertial navigation system (INS) and odometry. However, it does not solve the so-called ‘cold start’ problem — which is that you cannot use the train’s last known position as the new starting point because it could have been moved without powering up its electronics. The SSM algorithm solves this issue, because it directly correlates each satellite signal that should be received if the receiver were exactly at the position of the targeted POI. This correlation algorithm will have a very strong peak as soon as the antenna is near the correct position. This method has been simulated and tested on real tracks and has shown very good and significant results.”
Once the project achieves SIL 4 — a milestone scheduled for late 2025 — Hitachi Rail will embed the receiver designed and manufactured by Syntony GNSS in its future lines and trains.
Inertial-assisted navigation in an urban canyon
San Francisco’s market street, like all urban canyons, is a very challenging environment for satellite navigation. (Photo: Spondylolithesis / iStock / Getty Images Plus / Getty Images)
Urban canyons — city streets lined with tall buildings on both sides — present two challenges to GNSS: a limited view of the sky, thus a reduced number of satellites in view and a higher positional dilution of precision (PDOP) than under open sky, and multipath, as signals bounce off the vertical faces of the buildings before reaching receivers on the ground. This greatly complicates the tasks of accurate positioning and navigation — which is especially important for vehicles in congested city traffic, where it is essential that they do not stray from their lane.
Hundreds of research papers on possible solutions to the challenge of urban canyons have been presented at satellite navigation conferences over the years. One standard way to compensate for both a reduced number of satellites in view and multipath is to couple a GNSS receiver with an INS. GNSS and INS are inherently complementary technologies.
An INS consists essentially of an inertial measurement unit (IMU) and a computer. An IMU measures an object’s linear acceleration (typically, with three orthogonally mounted accelerometers) and angular velocity (typically, with three orthogonally mounted gyroscopes) in three axes. Because an IMU requires no external inputs, it can operate in tunnels, inside buildings and underwater, and is unaffected by such vagaries of the radiofrequency environment as jamming and spoofing. An INS integrates IMU data to compute positions that are very stable epoch to epoch. However, all inertial systems accumulate measurement errors, an effect known as drift, and therefore must be periodically re-initialized.
Conversely, GNSS-based navigation systems offer consistent absolute positioning accuracy, but their performance is severely degraded by a restricted view of the sky and multipath, two conditions characteristic of urban canyons, as well as RF interference (jamming and spoofing) and ionospheric disturbances.
Therefore, GNSS and INS, when coupled, assist each other beautifully: The INS takes over when the performance of the GNSS receiver is degraded or entirely impeded, then the latter re-initializes the former once it returns to full operation.
An INS provides another benefit for vehicle navigation. In addition to providing data about a vehicle’s trajectory, it also measures its attitude (roll, pitch and yaw), thereby enabling the software to better correlate and interpret the data from the other sensors. For example, when a car breaks sharply, its front end goes down and any forward-facing sensors measure distances to points closer to the car than they did a moment earlier, when its chassis was parallel to the street surface. An INS can also detect unsafe conditions, such as excessive slip angle, which is the angle between the direction of the rolling wheels and that in which the vehicle is pointing (true heading). A slip angle as small as 0.5° can trigger skidding, spins or rollover, especially in the case of SUVs and tall trucks.
A recent test in one famous urban canyon proved once again the value of GNSS-INS integration.
Market Street in San Francisco is one of the major routes across the city, with a diverse urban landscape. It poses numerous challenges in effectively navigating vehicles, especially autonomous ones, due to narrow streets with skyscrapers, resulting in limited sky view and severe multipath. ANELLO tested its GNSS INS here and evaluated the system’s performance in real-world driving conditions compared to other established inertial navigation systems solutions on the market.
Anello’s GNSS INS remains accurate despite multipath and a limited view of the sky. (Photo: ANELLO Photonics)
Market Street is a 3.5-mile urban artery that winds through diverse neighborhoods and commercial zones, presenting a formidable challenge for vehicle navigation as much due to its bustling traffic as for its towering urban canyons. The ANELLO GNSS INS addresses this complex environment by integrating data from its optical gyroscope with those from a GNSS receiver and wheel speed odometers using its sensor fusion engine and unique optical gyroscope technology. In addition to autonomous vehicles, it is also a good solution for agriculture, robotics, construction, trucking, mapping/surveying and defense applications.
To evaluate the performance of its GNSS INS, ANELLO installed it on a test vehicle together with a comparable system made by a different company. The ANELLO team then conducted multiple drives along Market Street, focusing its assessment on the system’s overall heading and positional accuracy. According to ANELLO, the system maintained a close alignment with the vehicle’s actual position along the entire route with a drift of about 1 m on multiple occasions, “significantly outperforming its competitor’s drift rates of 15.5 m, over a drive length of 250 m.”
“The interplay between GNSS and INS is like a tightly choreographed dance,” said Schauble, “where the choreographer is a sensor fusion algorithm. This algorithm continuously evaluates the quality of the GNSS and IMU measurements, assigning weights to each based on their reliability and accuracy.”
The accuracy of an INS is inherently dependent on the quality of its IMU. “When an INS system containing a MEMS IMU is used in an urban canyon, the algorithm is forced to either lean more heavily on the degraded GNSS measurements or accept the noisy and biased IMU measurements,” Schauble pointed out. “This often results in a poor and unpredictable solution in such environments. On the other hand, ANELLO’s GNSS INS leverages a silicon photonics optical gyroscope (SiPhOG) that provides significantly better bias and noise compared to MEMS IMUs. This makes the algorithms less vulnerable to degraded GNSS and multipath effects, allowing the INS solution to maintain accurate positioning in an urban canyon.”