Iris Automation has announced the commercial availability of Casia G, a ground-based version of its detect-and-avoid surveillance solution.
Using the same patented artificial intelligence (AI) and computer-vision technology as Iris Automation’s onboard solutions, Casia G provides 360° optical detection with alerts. It enables operators to avoid both cooperative and non-cooperative aircraft for safe beyond-visual-line-of-sight (BVLOS) flight.
Casia G creates a perimeter of monitored airspace for UAVs to perform work safely, without additional payload. It’s suitable for operations in fixed or temporary locations, supporting drone-in-the-box operations and augmenting or replacing human visual observers. BVLOS flight for unmanned systems has been challenging due to right of way concerns, specifically the inability for unmanned aircraft to successfully see and avoid other aircraft.
“A human has sufficient visual acuity to see airborne traffic only within a +/-5 degree field of view around our focal point. We have to scan the sky, and are frankly not very good at it,” said Jon Damush, CEO, Iris Automation. “Casia G sees the entire sky, with uniform probability and resolution, 10 times per second — without distractions or breaks. This solution for airspace awareness covers a large majority of small UAS use cases, but at a price point that is economically viable and without complex integration.”
Casia G can be expanded by adding additional units in a mesh to create a network of detection nodes for large-area air risk mitigation. The system then provides a single feed of cooperative and non-cooperative air traffic, available to an operator’s traffic management system. This provides a path to approvals for both larger area and one-to-many operations by enabling a holistic view of the airspace, the company said.
Casia G has already obtained a BVLOS waiver on behalf of the City of Reno. Iris Automation is in the process of proving additional deployment patterns and concepts of operation with the FAA.
The U.S. Department of Transportation’s Federal Aviation Administration (FAA) has announced $4.4 million in drone research, education and training grants to seven universities.
Research will focus on three areas:
electromagnetic compatibility
detect-and-avoid classifications
cybersecurity oversight.
“This funding and our ongoing partnerships with these universities will allow the FAA to safely integrate the airspace that has a growing number of diverse aircraft users,” said FAA Acting Administrator Billy Nolen.
The research initiatives and grant awardees include:
Evaluate Unmanned Aircraft Systems (UAS) Electromagnetic Compatibility
This research will assess the risks, identify drone design vulnerabilities, identify material and procedural mitigations, and propose guidance for safer electromagnetic compatibility with emitted and static fields.
University of North Dakota, $325,042
University of Kansas, $325,000
Drexel University, $325,830
Investigate Detect-and-Avoid Track Classification and Filtering
This research will provide proposed metrics, guidance and test methods to assess the effects of false or misleading information on detect-and-avoid capabilities. The findings will support beyond-visual-line-of-sight operations.
The Ohio State University, $732,441
Embry-Riddle Aeronautical University, $371,000
Mississippi State University, $330,000
University of North Dakota, $80,000
Illustrate the Need for UAS Cybersecurity Oversight and Risk Management
This research will address UAS cybersecurity oversight and risk management as it pertains to the National Airspace System and other FAA systems.
The ASSURE Center of Excellence is one of six that the FAA has established to help advance technology and educate the next generation of aviation professionals. Research conducted through ASSURE is focused on helping the drone market safely grow and integrate into the nation’s airspace.
More than 800,000 recreational and commercial drones are in the active drone fleet, and that number is expected to grow.
Autopilot platform developer UAV Navigation is integrating Iris Automation’s detect-and-avoid Casia software into its advanced autopilot solution, Vector. UAVs equipped with Vector and Casia now can detect uncooperative crewed aircraft in their airspace and autonomously or manually take corrective action, avoiding potential collisions.
The integration comes as Iris Automation releases Casia Software v2.2. The release also includes improvements to performance, track fusion and flight data uploads. Casia Software is embedded in all Casia systems and uses computer vision and artificial intelligence to detect and classify aircraft intruders, similar to human pilots.
Vector autopilots are specifically designed to execute flight completely autonomously, even if the remote-control datalink becomes unavailable or fails. They are used by a wide range of commercial clients flying rotary wing, target drone, fixed wing, and VTOL uncrewed aerial vehicles, worldwide.
UAV Navigation specializes in the design of guidance, navigation and control solutions for unmanned aerial vehicles (UAVs). Iris Automation is a safety avionics technology company pioneering detect-and-avoid (DAA) systems and aviation policy services that enable customers to build scalable operations for commercial drones.
It’s only a few weeks into the new year, yet there’s plenty happening in “UAV land” already. I expect another year of innovations, novel developments and groundbreaking firsts in unmanned aircraft.
This month’s question: What’s a Skyborg? The U.S. Air Force (USAF) has awarded contracts to Kratos, Boeing and General Atomics to prove their approaches to the UAV program.
All three have fielded existing, company-developed drones which are intended to fly alongside and be controlled by the latest frontline U.S. fighter aircraft. The idea is to have expendable force-multiplier unmanned aircraft support the capabilities of high tech, hugely expensive aircraft in order to undertake perhaps more risky missions, with the potential improvement acceptable versus unacceptable losses.
Flying alongside frontline fighter aircraft, these jet-powered unmanned aircraft could undertake more risky close support parts of the mission, where loss of the UAV might be more likely, while the manned aircraft remains outside the high-risk envelope. Hence the term attritable is now being applied to these unmanned accompanying vehicles, which are intended to have a reduced cost profile so that loss of the UAV might be more tolerable.
The Air Force Life Cycle Management Center (AFLCMC) has awarded Skyborg Vanguard Program contract amounts to Boeing ($25.7 million), General Atomics ($14.3 million) and Kratos ($37.8 million) for initial prototyping. All appear to have Skyborg prototypes in development.
Kratos has subsequently announced other contract modifications related to the U.S. Air Force Research Laboratory (AFRL) Low Cost Attritable Aircraft Technology (LCAAT) program.
Boeing will offer a variant of the Airpower Teaming System (ATS) drone being developed in Australia for the Australian Air Force. Engine runs and initial taxi tests were recently completed, however the program went into a short hiatus at the end of 2020 because of high COVID-19 infection rates in and around Sydney.
Boeing will offer a variant of the ATS drone being developed for the Australian Air Force. (Photo: Boeing)
General Atomics Aeronautical Systems Inc. (GA-ASI) is in the process of modifying two company-owned Avenger UAVs to incorporate upgraded datalinks and the Skyborg System Design Agent (SDA) software. Flight trials will investigate Artificial Intelligence capability for autonomous control of the UAVs while operating alongside manned aircraft – with the object of demonstrating that “a mix of manned and unmanned aircraft can communicate, collaborate, and operate together,” said David R. Alexander, president of GA-ASI.
General Atomics Avenger unmanned aircraft. (Photo: GA-ASI)
The jet-powered Avenger aircraft has been under development and evaluation for more than 10 years so it is well characterized, and its performance as a UAV is already understood.
The XQ-58A Valkyrie UAV has benefited from earlier generations of Kratos high-speed jet-powered target systems — something none of the other Skyborg competitors have in their bag of tricks. Kratos has been providing high-speed target drones to the military for a number of years, so jet powered drones are something they have been developing and fielding for a long time.
The Valkyrie UAV was developed under the LCAAT program to demonstrate unmanned low-cost capabilities, and to fly as a stealthy companion to manned aircraft. It is intended to carry internal and wing mounted weapons. The turbine division of Kratos is also investigating lower cost jet engine options for attritable UAVs.
Meanwhile, continuing developments in detect and avoid (DAA) are progressing, moving towards a solution for one of the main problems holding back integration of unmanned aircraft into controlled airspace.
A number of these solutions are based on ADS-B or Automatic Dependent Surveillance Broadcast, whereby the UAV location – usually position provided by onboard GPS — is transmitted at a regular interval by an equipped UAV. So any similarly equipped manned or unmanned aircraft can receive the ADS-B signal, has knowledge of where such flying obstacles might be and is therefore able to avoid a potential collision.
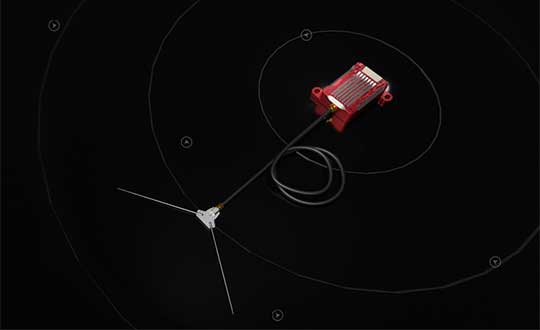
And for pseudo-satellite applications like the Airbus Zephyr which must transition between low-level airspace and the stratosphere, having on-board certified ADS-B is essential so that other aircraft and FAA air-traffic control have full visibility of such a delicate airframe which is lacking great maneuverability during climb-out, on station at altitude and during descent.
Zephyr pseudo-satellite UAV with uAvionix ADS-B transponder and GPS. (Photo: uAvionics)
Since Zephyr transitions through Class A airspace, the manufacturer Airbus decided that it should be equipped with an ADS-B transponder and GPS source which had undergone FAA recognized qualification testing and which meets known Technical Standard Order (TSO) requirements.
The equipment also needed to be small and use little power — at 70 grams and using only 2 watts, the uAvionix ping 200X transponder and truFYX GPS provide high power (54 dBm), high integrity transmissions of ADS-B and transponder mode data to Air Traffic Control (ATC) and other suitably equipped aircraft.
Zephyr is an all-electric vehicle, using sunlight to derive power from large photo-voltaic arrays which cover its upper surfaces. Batteries store surplus energy which is not consumed during daylight and provide power in order to maintain aircraft station through the night hours. From a perch at around 70,000ft, Zephyr is apparently focused on Earth-observation capability with payloads envisaged to include Electro Optical, Infrared, Hyper spectral, Passive Radio Frequency (RF) Radar, Synthetic Aperture Radar (SAR), plus Early Warning, Lidar and Automatic Identification System (AIS).
The Hover DAA solution. (Photo: Sagetech)
“Sagetech is another DAA supplier which is currently working with both fixed and rotary wing UAS customers who are incorporating DAA systems in their design and type certification projects,” said Tom Furey, CEO of Sagetech. “Sagetech is providing regulatory guidance, transponders and interrogators, and system design to ensure these UAV systems in development will satisfy the anticipated certification requirements. Sagetech itself, through technology development and partnerships with companies including Hover Inc., expects to offer a complete DAA prototype system by the end of this year.”
So, lots of progress towards Skyborg drone teaming systems with $78min awards by the Air Force Life Cycle Management Center from an anticipated budget of around $400m, while certified Detect and Avoid solutions help move commercial drones towards potential regular flight in controlled airspace.
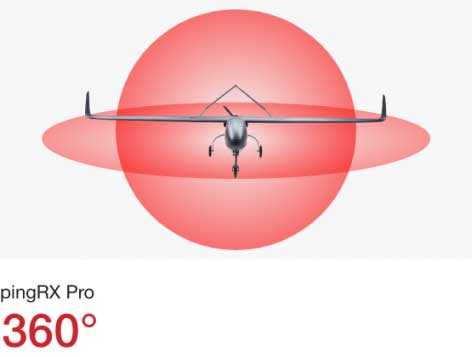
uAvionix has announced pingRX Pro, a detect-and-avoid ADS-B receiver for professional unmanned aircraft systems (UAS). PingRX Pro is expected to be available in the fourth quarter of this year.
pingRX Pro detects private and commercial aircraft operating on 978 MHz and 1090 MHz. The received aircraft’s identity, position and altitude are visualized on a moving map in real time, allowing the UAS operator or autopilot to remain well clear.
The new pingRX Pro continues uAvionix’s lineage of easy to integrate receivers with direct support for popular Ardupilot-based autopilot systems. By adding the protection of an aircraft-grade aluminum case and detachable remote mount antenna, pingRX Pro provides an ADS-B receiver for professional UAS operators who need performance, quality and flexibility for limitless UAS applications.
“UAvionix has led the way in ADS-B solutions for unmanned aircraft since our founding.” said Christian Ramsey, president of uAvionix. “Industry leaders and BVLOS operators continually choose ADS-B receivers as their primary detect-and-avoid solution. pingRX Pro now offers manufacturers and integrators the installation flexibility they need for their enterprise aircraft. ”
Weighing less than 8 grams, pingRX Pro features uAvionix ping ADS-B, proven in over a half-million ADS-B solutions worldwide, from UAS to airport vehicles to certified general aviation solutions.
PingRX Pro offers an external antenna, allowing operators to install it anywhere on the airframe. UAS are often designed from materials that can block radio frequencies and impair radio performance. By providing an external remote mounted antenna, performance can be maximized while providing critical protection of the receiver mounted inside the fuselage.
ADS-B Out
Diagram: uAvionix
ADS-B uses precision GPS information to broadcast the position of an aircraft in real time. The technology allows aircraft to share the skies more efficiently by telling each other where they are.
With ADS-B already widely adopted by manned aircraft, the task of detect and avoid is eased because the manned aircraft are broadcasting their position directly to the drone operator with no intermediary. While many aircraft not yet equipped with ADS-B OUT, nearly all large commercial operators are equipped.
The United States requires ADS-B OUT on all manned aircraft with an engine-driven electrical system operating near medium and large cities from the surface to 4,000 feet above ground.
Given the likelihood of ADS-B OUT on manned aircraft, and the density in these prime areas for inspection and package delivery, pingRX Pro ADS-B IN enables drone operators to meet their requirement to remain well clear of surrounding aircraft.
PingRX Pro tracks 100 simultaneous aircraft at ranges exceeding 150 miles, all at nearly 200% less power consumption of the alternatives.
MVT Geo-solutions, in partnership with Iris Automation, has been granted the first beyond-visual-line-of-sight (BVLOS) Special Flight Operations Certificate (SFOC) by Transport Canada using only onboard detect-and-avoid (DAA) systems.
The approval was granted based on the utilization of Iris Automation’s DAA system, called Casia, which provides commercial drones with automated collision avoidance maneuvers.
The waiver permits flights within the Unmanned Aircraft Systems (UAS) Center of Excellence’s controlled airspace Remotely Piloted Aircraft System (RPAS) test range in Alma, Quebec. This is the first BVLOS flight at the location leveraging only onboard DAA for air risk mitigation, and does not require ground-based observers or radar.
BVLOS flights unlock autonomous drone use for economically beneficial commercial applications including infrastructure inspection, mining, mapping, agriculture, emergency response and package delivery.
“Achieving the first BVLOS approval in Canada further validates our technology alongside multiple permissions we have already received from regulators in the U.S. and South Africa,” said Iris Automation CEO Alexander Harmsen. ”This technology is critical to safely integrate drones into the airspace along with manned-aircraft, and we look forward to unlocking commercial operations for our customers in Canada.”
Iris Automation’s onboard computer-vision DAA system is an effective, scalable and cost-effective technology to enable commercial BVLOS operations.
“The UAS Center of Excellence is looking forward to leveraging Iris Automation’s DAA system and existing flight expertise within our network to conduct BVLOS flights with MVT Geo-solutions,” said UAS Center of Excellence Director William de Keiser. “We will continue to develop our partnership with Iris Automation to provide training to local operators and enable BVLOS flights in Canada.”
The first BVLOS flights are scheduled to take place within weeks. The resulting data will inform more complex BVLOS operations in the future.
Kansas receives approval for first beyond-visual-line-of-sight drone flight in the nation using only onboard detect and avoid.
The Kansas Department of Transportation (KDOT) has received permission to conduct the first beyond-visual-line-of-sight (BVLOS) drone operation in the nation leveraging only onboard detect-and-avoid systems.
This is the first U.S. Federal Aviation Administration (FAA) authorized operation to fly without a requirement for visual observers or ground-based radar. It is the result of the 31-member Kansas UAS Integration Pilot Program (IPP) team efforts to advance drone technologies.
In a collaborative effort among Kansas State University Polytechnic Campus (K-State Polytechnic), Westar Energy, Iris Automation and KDOT, the Kansas IPP team will fly a nine-mile track to evaluate technologies to inspect power lines in rural Kansas. This approval is the first of its kind for long line linear infrastructure and is the first step to enable routine commercial infrastructure inspection across the state.
This is the first unmanned aerial vehicle (UAV) flight to leverage onboard sense and avoid systems alone for collision avoidance. It also marks the first required automated avoidance action.
Historically, all FAA-issued Part 107 BVLOS waivers have required visual observers or ground-based radar. These mitigations limit the possibility of true BVLOS flights, as they are typically prohibitively expensive and limit operations to pre-defined corridor areas with radar coverage.
This important milestone is facilitated by Kansas UAS IPP partner Iris Automation’s Casia onboard collision-avoidance system.
“The UAS industry has worked over 10 years to demonstrate the most significant commercial benefit of drone operations within the United States,” said Bob Brock, KDOT director of aviation. “We are proThe Applied Aviation Research Center on the K-State Polytechnic Campus, which assisted in development of the safety case that ultimately led to FAA approval, will be responsible for the training and flight operations with a cross-functional team from the KDOT IPP. Flights will take place over the next few months, providing the FAA with much-needed data on true BVLOS activity.d of the joint state, university and industry team that made this landmark decision possible.”
“The ability to fly BVLOS missions without ground-based radar or visual observers is a significant advancement, and Westar Energy views this as an opportunity to play a key role in shaping the future of UAS operations within the utility industry,” said Mike Kelly, Westar Energy Senior UAS coordinator. “Being able to operate under this waiver allows the Kansas IPP team the ability to research and develop truly scalable BVLOS UAS operations for the automated inspection of linear infrastructure.”
“We look forward to leveraging this waiver to integrate UAS technology into the transmission line inspection process,” said Kurt Carraway, UAS Executive Director of the K-State Polytechnic Applied Aviation Research Center. “We are certain that utilities will be able to quickly realize a return on investment while mitigating safety to their maintenance personnel and increasing the reliability of their infrastructure to the general public.”
“Flying rural missions like these without a human pilot onboard or costly radar on the ground is exponentially safer and more cost effective,” said Iris Automation CEO and Co-Founder Alexander Harmsen. “The FAA is trusting us to pave the way for a safer, scalable future together with this precedent-setting second approval of our system.”
The U.S. Department of Transportation selected Kansas Department of Transportation as one of nine participants in the FAA UAS IPP. This program allows state, local and tribal governments to conduct advanced UAS operations to gather data to assist the rulemaking process that will set the boundaries for UAS operations in the United States.
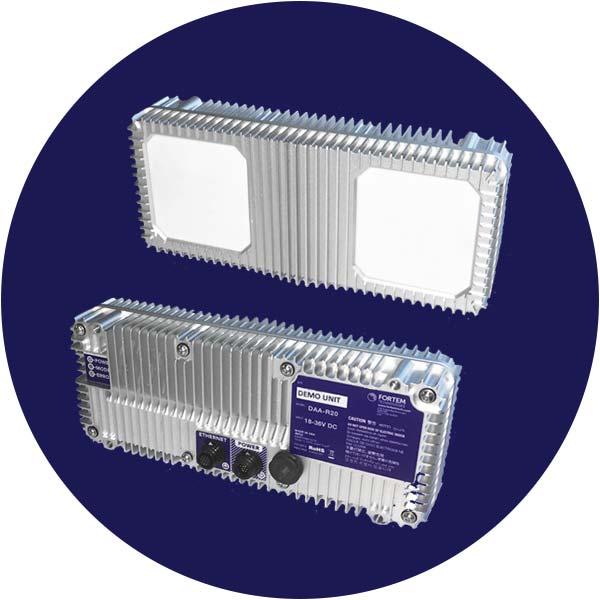
Fortem Technologies‘ new TrueView technology is being used in the U.S. Unmanned Aircraft Systems Integration Pilot Program to detect potential air-to-air collisions and enable unmanned aircraft to safely navigate beyond visual line of sight (BVLOS) day or night and in clouds, fog, smog and other challenging weather conditions.
The TrueView R20.
Fortem Technologies is working with Lead Pilot Partners to further the pilot program. The program aims to accelerate safe integration of UAS into the national airspace.
Fortem’s TrueView R20 meets critical selection criteria by putting safety and security data at the forefront to enable expanded drone operations such as BVLOS and operations at night. Using AI algorithms, TrueView provides accurate real-time situational intelligence and awareness for safe, autonomous, unmanned aircraft operations.
Fortem TrueView R20 weighs 1.5 lbs. and is a breakthrough technology because of its small form factor, weight, power requirements and low cost.
Fortem’s radar technology has been hardened over the past six years through rigorous testing with the U.S. Department of Defense.The company provides advanced radar systems and associated software systems for manned and unmanned aircraft as well as its own modern air defense system known as the Fortem DroneHunter.
In January, Fortem Technologies announced the close of a $5.5 million funding round led by Signia Venture Partners and Data Collective.
“One of the biggest challenges for the UAS industry is the ability to detect other aircraft and stay well clear from potential collisions,” said Jared Essleman, director, Utah division of aeronautics. “Achieving safe autonomous flight beyond-visual-line-of sight is going to be the next big chapter for the aviation industry. The announcement of TrueView R20 technology is an exciting development for safe autonomous operations, allowing UAS to course correct as needed to mitigate risk.”
“We are proud of our progress and ability to innovate around one of the most daunting challenges in the drone industry; namely safe BVLOS and nighttime operations,” saidTimothy Bean, CEO of Fortem Technologies. “With TrueView, we have responded to feedback from our customers to bring this needed detect-and-avoid product to a worldwide market.”
U.S. Secretary of Transportation Elaine Chao provided further details of the department’s new Drone Integration Pilot Program at a public event held Nov. 2 at the U.S. Department of Transportation (DOT) headquarters in Washington, D.C.
Chao was joined by hundreds of drone operators, industry leaders, members of the public, law enforcement and first responders, and local, state, tribal and federal officials.
The pilot program is designed to safely test and validate advanced operations through various partnerships across the country with oversight by the Federal Aviation Administration (FAA).
A Federal Register notice lays out the timeframe, requirements, and goals of the new program, which will pair local, state, and tribal entities with private sector players in the drone industry to develop and deploy new operational concepts that are not currently in widespread use.
The first step is for government officials to complete a Notice of Intent, signifying their intention to complete a full program application. Applicants will have 20 days to complete a Notice of Intent, followed by the requirement that they complete an application through the FAA/UAS Portal within 57 days. Within 180 days, initial program applicants who receive approval could begin deploying drones under the limitations coordinated and agreed to with the FAA. The program will last for three years.
After evaluating all the applications, DOT will select a minimum of five partnerships. Full details of the Federal Register Notice and Application process can be found here.
Webinars Scheduled. The FAA is hosting three webinars providing an overview of the program, application process and specific criteria and deadlines that must be met. The webinars will be held on the following times.
The pilot program will evaluate a variety of operational concepts, including night operations, flights over people, flights beyond the pilot’s line of sight, package delivery, detect-and-avoid technologies, counter-UAS security operations, reliability and security of data links between pilot and aircraft, as well as local management of UAS operations subject to FAA oversight.
Industries that could see immediate opportunities from the program include commerce, photography, emergency management, precision agriculture, and infrastructure inspections and monitoring.
The program will help tackle the most significant challenges in integrating drones into the national airspace while reducing risks to public safety and security. The program is designed to provide greater regulatory certainty and stability to local governments and communities, UAS owners and operators who are accepted into the program.
In less than a decade, the potential economic benefit of integrated unmanned aerial systems into the nation’s airspace is estimated to equal up to $82 billion and create up to 100,000 jobs,, according to AUVSI’s The Economic Impact of Unmanned Aircraft Systems.
Chao told attendees the program application and deployment process will move quickly because a priority for DOT is encouraging innovation in the drone industry while maintaining safety for communities involved.
“The drone pilot program will accelerate the safe integration of drones into our airspace by creating new partnerships between local governments, the FAA, and private drone operators,” Chao said. “These partnerships will allow local communities to experiment with new technologies like package delivery, emergency drone inspections, and more, on terms that work for them and in ways that support a unified and safe airspace.”
“This program will put community and industry partnerships at the leading edge of aviation technology,” said FAA Administrator Michael P. Huerta. “What we learn through testing operational concepts in these communities will be invaluable and give us clarity on rules that ensure safety and continued innovation.”
“More and more businesses and public safety providers are embracing UAS to expand and enhance their service offerings,” said Brian Wynne, president and CEO, Association for Unmanned Vehicle Systems International. “This growing demand illustrates a new renaissance in aviation and technology, which requires sustained collaboration and support by government at all levels.”
I didn’t get to this year’s IEEE/ION PLANS meeting in Savannah, Georgia, in April, but I did find a few papers that interested me. You might have read past articles of mine that looked at the challenges of indoor navigation. And, of course, unmanned vehicles technology also is one of my favorites.
So, I was pleased to find papers that addressed a few key issues for me:
An approach that employs cooperative smartphones to achieve about 3 meters indoor location.
Another look at the problems in using smartphone embedded GNSS for RTK positioning.
Relative positioning between UAVs using GNSS, radio and inertial, and also adding image processing in a GNSS denied environment.
Analysis of encounter-alerting issues for UAV detect and avoid systems.
Indoor navigation
Indoor navigation is an area which is seeing quite intense research, and several companies have now put initial products on the market. The general approach has been to use sensors within smartphones combined with radio-frequency (RF) signals which seem to be readily available in stores and malls which indoor location is finding commercial applications.
If a position can be generated by an internal GNSS receiver within the phone in an outdoor setting prior to entering a building, the trick is to carry that position forward as GNSS signals disappear when the user moves away from the entry area. Inertial sensors in the phone are usually not accurate enough to do this job on their own, so ranging using RF from Bluetooth and Wi-Fi transmitters/beacons may be integrated to provide a position solution. Magnetic sensors in the phone have also been used to detect fixed metal structures within a building and use this data to aid location determination.
The problem is that you need an up-to-date database of where the Wi-Fi and Bluetooth are located, and it has been taking a lot of work to map or “fingerprint” the interiors of buildings — and guess what, these “beacons” often are moved after a mall or store is mapped, so RF ranging can become quite inaccurate.
So, fearless investigators from the University of Buckingham and University of Northampton in the U.K. have come up with the concept of using ranging between cooperative smartphones to aid each other and achieve location accuracies of 5-10 meters.
While outdoors with good GNSS position, the inertial sensors in each phone are calibrated, each phone gets position using its internal GPS and a network is formed between the phones using their relative positions. Then when a phone goes inside the building, step counting is used to maintain relative positioning in the network. This can result in around 3 meters positioning for the interior phone.
Well, yes, not everyone has two other buddies waiting around so one guy can go in and find the classic comic store, but for applications such as firefighters, urgent/health care, and security/police, this approach might work well.
Cooperative smartphone location overview. (From “UNILS: Unconstrained Indoors Localization Scheme based on cooperative smartphones networking with onboard inertial, Bluetooth and GNSS devices,” H.S. Maghdid, A. Al-Sherbaz, N. Aljawad and I.A. Lami.)
Another paper looked hard at the options there might be to resolve problems with GPS performance which has previously precluded running RTK on smartphones. If we could achieve centimeter positioning on a mass-market basis, many current applications which are inhibited by cost, could become possible and revolutionize even the way we live. People have already used external solutions to solve some of the problems, but leading researchers at Texas U, with Broadcom and Radiosense support, may have come up with a self-contained solution.
It is known that there are issues with the capability of the GNSS chip and oscillator components in smartphones — the observables they produce are not currently of sufficient quality to sustain RTK performance. So these researchers worked with Broadcom, who supplied them with an Android smartphone, which provided access to raw code and carrier-phase outputs and was also able to process these measurements internally.
A smartphone’s Android software stack with the GNSS components and data flow highlighted. (From “On the Feasibility of cm-Accurate Positioning via a Smartphone’s Antenna and GNSS Chip,” T.E. Humphreys, M. Murrian, F. van Diggelen, S. Podshivalov, K.M. Pesyna, Jr.)
Carrier phase measurements in smartphones suffer from five anomalies not found in survey-grade GNSS receivers — but four of these can be fixed in post-processing. The remaining phase measurement error increases with time and precludes RTK centimeter-level positioning — it could be the result of round-off error due to processing limitations. Otherwise it seems possible that carrier-phase differential GNSS positioning might be achievable.
However, the researchers also studied antenna performance and found that its gain pattern was significantly affected by strong local multipath. The impact is that deep, unpredictable fading and large phase error will compromise centimeter-accurate positioning.
So we’re not quite there yet, but with a new smartphone version showing up almost every other year, it is always possible that researchers and manufacturers will eventually evolve designs in the right direction, and ultimately solve the problem.
Unmanned aerial vehicles
Meanwhile, researchers at West Virginia University have been investigating methods to maintain relative positioning between UAVs in flight. With drone “swarms” and cooperative drone missions becoming more common, if a simple method could be derived to maintain relative separation, these applications could become more prevalent, especially in a GPS denied environment.
So, with only noisy ranging radios between UAVs, and an onboard navigation system solution on each vehicle, the researchers set about developing an algorithm which can maintain relative position. The solution is complicated by the geometry between the UAVs, how often range measurements are made, and the noise in those measurements. To constrain these variables, the study was run assuming the UAVs travel at the same altitude.
The study concluded that— provided the UAVs travel in the same direction, parallel to each other — that their algorithm could find a solution all the time. The focus of the study appears to be on determining hearing and relative bearing between the vehicles and results were varied depending on the frequency of range measurements, the amount of noise and the geometry. So a few steps forward along the path towards making drones work together in a hostile environment where GPS is jammed. (See “Cooperative Relative Localization for Moving UAVs with Single Link Range Measurements,” J. Strader, Y.Gu, J.N. Gross, M. De Petrillo, J. Hardy.)
Another study on the same problem of maintaining relative position between drones was also undertaken by West Virginia University, Systems & Technology Research and the Air Force Research Laboratory. However, their solution didn’t only use ranging between vehicles. It took advantage of inertial measurements on each drone, computer vision calculations derived from downwards looking cameras on both UAVs, and finally magnetometer measurements were also added into a Kalman filter solution.
UAV platform payload diagram and assumptions. (From “Unmanned Aerial Vehicle Relative Navigation in GPS Denied Environments,” J. Hardy, J. Strader, J.N. Gross, Y. Gu, M. Keck, J. Douglas, C.N.Taylor.)
With several additional sensor measurements, the researchers were able to predict that relative positioning could be maintained in a GPS denied environment. They also considered ranging radio, magnetometer and vision update rates, and the performance/update rate of various quality inertial sensors. The principle objective is to enable accurate target hand-off between drones as one approaches the other. Overall, they found their model could support 10-meter-level position and 0.5 degree accuracy.
Finally, for safe operation of UAVs in the U.S. National Airspace System (NAS), minimum Detect and Avoid (DAA) standards for small to medium size UAVs are being developed for operations within drone-accessible airspace. DAA has to provide the “see and avoid” for unmanned aircraft systems (UAS) that pilots of manned aircraft use to avoid other aircraft. So surveillance sensor information needs to supply the UAV and the remote Pilot in Command (PIC) operator with the situational awareness needed to remain well clear of other aircraft.
Part of what DAA should provide are alerts working to universal standards for all UAS.
Zones used in alert evaluation. (From “Analysis of Alerting Performance for Detect and Avoid of Unmanned Aircraft Systems,” S. Smearcheck, S. Calhoun, W. Adams, J. Kresge, F. Kunzi.)
The research presented by CAL Analytics and General Atomics (with technical support and guidance by RTCA committee SC-228 and NASA) outlined the evaluation alerts generated when other aircraft are anticipated to penetrate into a well-clear volume around a UAV.
Alerts can be “missed,” “late” and “early” — all of which can impair DAA performance and safety and which need to characterized and mitigated. Sensors currently under consideration for use in DAA include Automatic Dependent Surveillance Broadcast (ADS-B), active surveillance transponder and airborne radar — this study looked at ADS-B and radar and the trade-off that they provide related to desirable and undesirable alerts.This analysis will likely feed into the development of UAS DAA alerting standards and requirements.
Typical DAA tracker approach. (From “Analysis of Alerting Performance for Detect and Avoid of Unmanned Aircraft Systems,” S. Smearcheck, S. Calhoun, W. Adams, J. Kresge, F. Kunzi.)
Radar surveillance errors were found to increase the probability of Missed, Late, Short, Early and Incorrect Alerts, all of which is bad news for radar. ADS-B surveillance errors increased the probability of Short, Early, and Incorrect Alerts. However, ADS-B did not lower performance as much as radar — better news for ADS-B. All levels of surveillance errors were seen to increase the amount of alerting jitter, with radar seeing the most significant undesirable effects.
Guardian UAS used in DAA tests.
Highly reliable, proven DAA systems are likely an essential part of the safety system for UAS if they are to become a regular part of operations in the NAS. General Atomics has tested a DAA system including GA’s Due Regard Radar (DRR) aboard a U.S. Customs and Border Protection (CBP) Guardian Unmanned Aircraft System (UAS), a maritime variant of the Predator B UAV. The DAA system also includes Honeywell’s Traffic Alert and Collision Avoidance System (TCAS) and Sensor Tracker, specifically designed for DAA.
Schiebel Camcopter S-100 demonstrating detect and avoid system.
And, also in December of last year, a Schiebel Camcopter S-100 flew demonstration flights with an NLR-developed AirScout Detect and Avoid System. Two helicopters flew “intruder” profiles against the UAV during the demonstration. The Camcopter S-100 flew several scenarios and “unexpectedly” encountered an intruder aircraft. The system determined in real time the corrective action to maintain separation from the intruder aircraft.
So, progress on indoor navigation, research towards running RTK on smartphones, relative positioning between UAVs, and advances in Detect and Avoid solutions for UAVs. Something of a mixed bag, but all promise further progress around different solutions for a number of market navigation segments.
Echodyne today announced the development of MESA-DAA, an Airborne Detect and Avoid (DAA) radar for small to medium-sized unmanned aircraft systems (UAS).
Echodyne made the announcement at AUVSI’s Xponential 2016 trade show and conference.
The small, lightweight and low power DAA radar will operate at K-band and be capable of rapidly scanning a broad field of view in azimuth and elevation at ranges out to 3 kilometers. MESA-DAA is based on Echodyne’s patented Metamaterials Electronically Scanning Array (MESA), which offers breakthrough cost, size, weight, and power (C-SWAP) improvements over traditional electronically scanning array technology.
The MESA-DAA radar is scheduled for release at the end of 2016 and will be an evolution of the MESA-K-DEV radar, which Echodyne released today.
“Detect and avoid is the single biggest technical hurdle to opening up the National Airspace System to UAS,” said Jim Williams, former head of the Federal Aviation Administration’s (FAA) UAS Integration Office and current Principal at Dentons US, LLP and Echodyne advisor.
“NASA, the FAA, industry and academia have spent years studying the DAA problem and have determined radar is by far the best sensor, if not the only sensor, capable of providing the all-weather, long-range, and broad field of view scanning that is necessary for safe, highly reliable DAA. MESA-DAA technology may well represent the key to safely opening up airspace for beyond visual line of sight operations.”
Detect and Avoid Requirement
One of the FAA’s central aircraft operating rules is that pilots maintain vigilance so as to see and avoid other aircraft. To fulfill this requirement, UAS need to remain within visual line of sight of their pilot.
Although the regulations for UAS are still in development, there is widespread acceptance that for UAS to fly beyond line of sight of their operator, they will need DAA sensors and systems that safely replace the pilot’s see and avoid capability. This DAA capability will need to detect both cooperative objects (those transmitting their position with a transponder) and non-cooperative objects (aircraft without transponders, birds, etc.).
Radar is the only sensor capable of reliably performing DAA in all weather conditions and at the ranges, broad fields of view and scanning speeds necessary for safe operation of UAS in the NAS. Radar is the only sensor that directly measures the position of an object (such as range, azimuth, elevation) as well as its relative speed of approach (via Doppler).
“We believe MESA-DAA will be a critical technology for safely opening up the National Airspace System to small UAS for beyond visual line of sight operations,” said Eben Frankenberg, founder and CEO of Echodyne. “Radar is the sensor of choice for DAA, but existing radar technology is too slow, too bulky and too expensive to provide DAA radar capabilities on small UAS. The C-SWAP characteristics of MESA and our DAA radar are completely unparalleled and uniquely well suited for small UAS.”
In the April 7 “FAA Aerospace Forecast,” the FAA reports that it has already granted more than 4,000 Section 333 Exemptions for commercial UAS operations, clear evidence of the high demand for UAS applications. The FAA forecasts that sales of commercial small UAS could exceed 600,000 for 2016 and grow to 2.7 million by 2020, noting that “the overall demand for commercial UAS will soar once regulations more easily enable beyond visual line of sight operations and operations of multiple unmanned aircraft by a single pilot.”
MESA-DAA Specifications. MESA-DAA is based largely on Echodyne’s existing MESA-K-DEV radar. Package size and weight are expected to be less than MESA-K-DEV, especially if the unit is placed inside the UAS. Range is expected to be 3 kilometers, and scanning speed is expected to be 1 Hz for the entire field of view and as fast as 10 Hz for updating locations on previously detected objects. The field of view for a single unit is expected to be ±60 degrees in azimuth (120 degrees total) and ±45 degrees in elevation. Multiple units can be combined if greater field of view is desired.
MESA-K-DEV. Echodyne also announced availability of MESA-K-DEV, an ultra-low C-SWAP, fast electronically scanning radar based on its patented MESA. The radar operates at K-band. The fully self-contained and packaged unit measures 22 by 7.5 by 2.5 centimeters and weighs 820 grams.
Unlike conventional mechanical apertures that steer a radar beam using motorized gimbals, Echodyne’s MESA requires no moving parts to steer its beam. And unlike phased array radars or active electronically scanning array radars that require complicated and expensive transmit/receive modules — including phase shifters, amplifiers, circulators and low noise amplifiers behind every single antenna element — MESA uses a simpler meta-materials architecture. The net effect of this simplified architecture is lower cost, size, weight and power.


















 Echodyne
Echodyne