Last week, I conducted a webinar along with Dr. Michael Whitehead titled “SBAS, DGPS or Post-processing? Which Should You Use?” It was one of the best webinars I’ve conducted to date. More than 600 people registered. We barely squeezed it into 65 minutes and could have kept going for the better part of two to three hours, given the subject matter to cover and the number of questions we received before and during the webinar. Thank you for attending, if you did. If you weren’t able to you, can download it by registering here. After registering, you’ll be provided a link to download it.
I knew that only having 65 minutes would be a serious issue for the webinar because the discussion could take many worthwhile tangents. And it was. But alas, we stuck to the presentation agenda, stayed on schedule, and were able to address several audience questions.
We had a lot of questions before and during the webinar. As customary, I’d like to address some of those as well as present the poll results here. First, the poll questions and results with accompanying pie charts to illustrate the results.
Poll #1: For those of you who use post-processing, what are the reasons you use it?

Total votes: 117
Gakstatter comment: This is an interesting spread with no clear dominating reason. Based on data I’ve seen and data we collected, I’m not convinced that post-processing is more accurate. If it is, is it worth the extra 10%, 20%, or ??% accuracy? I understand the votes for more reliable corrections. There’s something to say for reverse processing (forwards and backwards).
Poll #2: For those of you using post-processing, from where do you access GPS base station data?

Total votes: 129
Gakstatter comment: These answers don’t surprise me. National and regional CORS have become very prolific in the past 10 years.
Poll #3: For those of you who use real-time DGPS/SBAS, what is the reason you use it?

Total votes: 110
Gakstatter comment: These answers surprised me a little. I thought more people would vote for “less complicated.” Does that percentage of users really need corrected coordinates in the field? Why? E-mail me a quick answer if you have a chance.
Poll #4: For those of you using real-time DGPS/SBAS, from where do you access DGPS/SBAS corrections?

Total votes: 129
Gakstatter comment: This answer doesn’t surprise me at all. I suspect RTK networks will increase due to their continued proliferation and different levels of accuracy offered.
Poll #5: When I purchase GPS/GNSS equipment in the future, I will likely select equipment that utilizes the following correction method (select all that apply):

Total votes: 144
Gakstatter comment: This was the only multi-answer poll. People could select more than one answer. These answers were surprisingly close. That surprised me. It didn’t surprise me that SBAS was the leader. It surprised me that post-processing is still as predominant as it is. If you have a chance, e-mail me a quick explanation as to why you will use post-processing in the future.
Before diving into some audience questions, I’d like to clarify the slide illustrating the post-processing plot shown below.

During the webinar, we were discussing PPP (precise-point positioning) when this slide was displayed. This data was not corrected via PPP, but rather post-processing the pseudorange data, which is the equivalent of L1 SBAS and L1 DGPS. The point was to show how SBAS/DGPS accuracy compares to post-processing. In the real world, you won’t post-process 24 hours of data. Some of you will post-process only a few minutes of data per session in cases where you need to turn off the receiver and travel between points. In other cases, users will keep the receiver tracking between points, allowing reverse processing to work more effectively.
On to the Questions
Question #1: Will there ever be a way in which the position of a rover can become fixed by using two fixed base stations?
Gakstatter comment: SBAS does this already. SBAS’s consist of a number of base stations within the coverage area (e.g., WAAS has 38). Data from many base stations is used to compute the correction information sent to an SBAS-enabled GPS receiver.
I’m assuming your reasoning is to improve position integrity.
Another method of accomplishing this is by post-processing against more than one base station or switching between DGPS beacon stations. If they differ significantly, then you might want to compare against a third base station.
Question #2: At what point in time will the strength of the GPS signal be increased? To what strength will this occur? 500 times more powerful? What improvements in signal reception will be experienced? Indoor my house reception?
Gakstatter comment: The GPS broadcast strength is increased with new GPS satellite model. For example, the current Block IIF satellite broadcasts the new L5 signal about four times stronger than L2C. While no one can be sure yet as to how much this will improve indoor positioning, there will be some marginal improvement in conditions where GPS doesn’t operate very well today. Also helping will be the improved code and error-correcting techniques that should make operating in difficult conditions a bit better, especially where there are a mixture of satellites with strong and weak signals.
Also, it raises the issue of a viable L5 single frequency receiver, which should outperform the L1 C/A single frequency receivers of today.
Question #3: NAD83, WGS84, ITRF differences, how to make the best choice?
 
;
Gakstatter Comment: I don’t think there is an incorrect choice, except maybe that NAD83 is a 2D system and will eventually give way to a 3D system, but that won’t happen in the U.S. for many years.
Otherwise, it’s a question of matching disparate data sets. Probably the #1 question I hear from users is “why doesn’t my GPS data line up with my basemap?” The answer is almost always a difference in datums. Many papers have been written on this.
Click here for a good PowerPoint presentation created by Dave Doyle of the National Geodetic Survey.
Question #4: Are there any open source post-processing software programs available?
Question #5: If a person uses real-time correction satellites, is there a need to post-process?
Gakstatter Comment: It’s rare that someone would do both, but not out of the question. For example, one might rely primarily on real-time corrections and record raw data for post-processing in case there is a problem receiving the real-time corrections. The opposite is true, too. One might rely primarily on post-processing and use real-time corrections as a back-up in case there is a problem with post-processing.
Caveat emptor: There are probably datum differences between the sources of real-time and post-processing corrections. This needs to be reconciled when combining data that has used the two sources.
Question #6: Is it possible to post-process data without using a DGPS?
Gakstatter Comment: Yes, all that is required for post-processing is the ability to record raw observation data.
Question #7: Are there geographic areas in the U.S. that are not covered by NGS CORS stations?
Gakstatter Comment: No, not for pseudorange (L1) differential corrections. The distance to the base station will vary depending on where you are located and thus may affect your accuracy to some degree, but the density of CORS in the U.S. is such that you will never be more than a couple of hundred kilometers from a base station and likely much closer.
A side note: Back in the mid-1990s, I remember experimenting with post-processing software we were developing. At that time, I tried post-processing data collected in Oregon with a base station located in Atlanta, Georgia. This was a 2,500 km baseline. It produced a result, albeit not one I would necessarily trust. The only limitation is that the two units must track common GPS satellites. With that length of baseline, it’s possible that only half of the satellites tracked may be in common.
Question #8: What is the ideal distance range from a CORS station to your site to use post-processing?
Gakstatter Comment: Ideally, as close as possible. The further you are from a base station, the more potential error will be introduced due to atmospheric differences between the two locations. As stated above, the density of CORS (at least in the U.S. and many parts of the world) are such that the nearest base station is quite near and likely no more than a couple of hundred kilometers away.
Question #9: What is the trade-off between short observation time (couple of minutes) to position accuracy when using post-processing?
Gakstatter Comment: Ok, remember we are talking about pseudorange corrections (as opposed to carrier phase). Given that the receiver has been tracking satellites for a period of time (let’s say two minutes), the observation times only need to be a few seconds for each feature to be mapped.
For example, if you are mapping utility poles and don’t turn off the receiver between poles, you only need a few seconds (5-10 seconds) of data for each pole and average it for the final coordinate. Think about if you’re mapping a road centerline. You’ll likely record data while moving, so each second you are recording a new position.
Question #10: What about the vertical correction? I see in the slide an antenna carried in a backpack. Is the antenna placed at ground level for point? Is there a constant correction required?
Gakstatter Comment: Vertical accuracy is typically worse than horizontal accuracy by a factor of 1.5-2.0 due to the inferior satellite geometry, especially in areas of hilly terrain and/or trees/buildings where the horizon is blocked. Good geometry for vertical positioning requires tracking a number of GPS satellites that are low on the horizon.
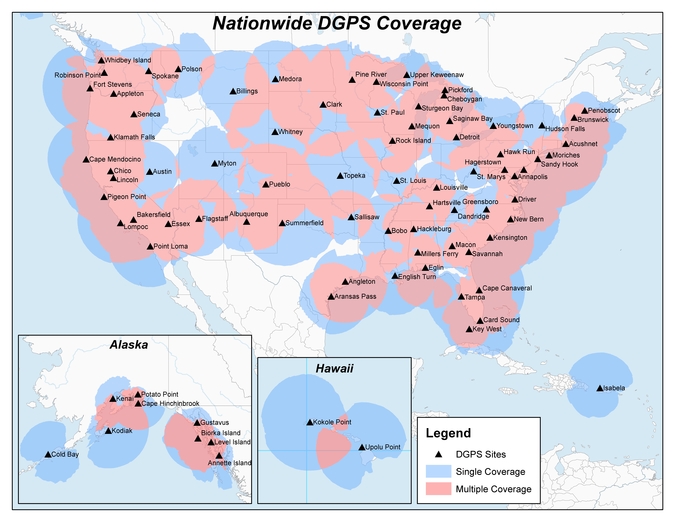
Question #11: What is the future of DGPS? I heard Coast Guard beacons were going away?
Gakstatter Comment: The beacon stations operated by the U.S. Coast Guard are not in jeopardy and never have been. Neither have the marine beacons in the other 40+ countries that broadcast GPS corrections. However, the U.S. Department of Transportation operates 29 inland stations in the U.S. which have faced budget challenges the past few years. In April 2008, the U.S. DOT
issued a policy decision to continue operating the 29 inland sites. Construction of seven sites remains that would allow the Nationwide DGPS to reach Initial Operating Capability (IOC), which would provide coverage to 99% of the continental U.S. No budget has been approved for the construction of those seven sites.
Question #12: Can you briefly explain the difference between DGPS & RTK?
Gakstatter comment: Here are a couple of good websites that explain each of these techniques. Essentially, DGPS is a real-time GPS positioning technique accurate to about 30 centimeters at the very best. RTK is a real-time GPS positioning technique accurate to about 1 centimeter.
Question #13: How much time do you need to get the position from the base station for real-time DGPS?
Gakstatter comment: Assuming both receivers are already tracking satellites, your receivers will begin using the base-station corrections as soon as the data link is made between the two.
Question #14: Can you comment on advantages (if any) of using corrections from a network RTK service for DGPS corrections. Any advantages on eliminating base separation?
Gakstatter comment: I’ve heard that DGPS corrections are optimized within an RTK Network. However, I need to research this a bit further to better understand the true advantages, if any.
Whitehead Comment: A virtual base station (VBS) solution could be formed using the network. Thus differential GPS could exhibit the same advantages using such a network that RTK does (cancellation of atmosphere errors). The software would have to support this.
Note though that if close to one of the Reference Stations in the network, it is probably best to just use the nearest Reference station as this will best cancel the atmosphere errors. When in the middle the network, the VBS solution would use surrounding reference stations to provide a good approximation of atmospheric errors and then output a correction that looked like it originated from a reference station (virtual station ) near to the users receiver.
Question #15: What is up with PRN 135? Still on station?
Gakstatter comment: Communication has be re-established with WAAS PRN 135 and is being tested by its owner, Intelsat, as well as the Federal Aviation Administration (FAA). See a detailed article by clicking
here. The latest information I heard is that it’s currently at 93
°W longitude undergoing testing. If the testing is successful, it will be re-located back to 133
°W longitude and brought back into WAAS service. A timeline has not been published, but I’m guessing within the next 30-60 days.
Question #16: We used to hear that your point accuracy degraded as the distance from the base station increased. One reason we used to post process. Is this still a factor?
Gakstatter Comment: Due to advancements in GPS technology, it’s not as much of an issue as it used to be. I think this is illustrated in the results we achieved in our 24 hr test data.
Ten years ago, it would be hard to find a GPS L1 receiver that would receive DGPS corrections from a beacon station 184km away and still achieve sub-meter horizontal accuracy at the 95% confidence level.
I’m not saying the distance is negligible. There still the issue of tropospheric, ionospheric and satellite orbit errors as you move farther away from the base station. But, it’s certainly less of a factor than it was before.
Whitehead Comment:
Question #17: If we use WAAS correction, does it really help to try to use a post-processing type of software afterward? So far we just use WAAS correction.
Gakstatter Comment: One of the reasons we collected data using several sources of real-time corrections and also showed the results of post-processing was to illustrate the differences between the two.
If you follow proper procedures, there’s no reason to think that accuracy obtained using WAAS will differ significantly from accuracy obtained using post-processing. This is assuming that you’re using a single-frequency GPS receiver and post-processing using pseudorange corrections and not carrier-phase processing. Some receivers like the Trimble GeoXH are actually dual-frequency receivers and so data from it will likely surpass the accuracy of WAAS if you’re using its dual-frequency antenna and equivalent post-processing software.
By proper WAAS procedures, I mean letting it track for five minutes upon initial start-up to allow it to download a current ionospheric map.
Question #18: Does SBAS use 1 receiver and no base station? Expensive?
Gakstatter Comment: SBAS uses 1 receiver and a lot of base stations. You just don’t have to pay for the SBAS base stations (or to use them.) The signal, like GPS, is provided free of charge.
SBAS consists of a network of base stations (WAAS has 38) and communications satellites that broadcast corrections to users on the ground (or aviation users in the air).
Question #19: How far north in Alberta is WAAS coverage available and useful?
Gakstatter Comment: The primary concern would be visibility of the WAAS GEO satellite that broadcasts the correction data. Following is a map that illustrates the coverage. The contour lines are degrees above the horizon for which the two WAAS GEO satellites are visible.
Solid line = PRN 138, Dashed line = PRN 133
Question #20: Do you have any comments about CDGPS in Canada/US?
Gakstatter comment: Sadly, the CDGPS service is being decommissioned March 31. You can read about it
here.
Question #21: I am hearing from my state specialists (NRCS) regarding the LightSquared issue. We are advising working through the PNT ExComm and our cooperating partners.
Gakstatter comment: This is a potentially serious issue for GPS users.
Click here for the latest news as of February 1.
Question #22: Where do you find the DGPS beacon station list and what is available to you?
Gakstatter comment: I’m not sure if this is 100% complete, but it’s the most complete list I’ve seen.
Click here.
Question #23: Are most mapping-grade GPS receivers (for example Trimble GeoXh) equipped off the shelf to receive beacon signals?
Gakstatter comment: Some receivers are equipped off-the-shelf, others are not (such as the GeoXH) and require additional hardware.
Question #24: In which areas is it possible to use corrections from OmniSTAR?
Gakstatter comment: Click here to view worldwide maps of OmniSTAR coverage.
Question #25: Was the Garmin set to WAAS?
Gakstatter comment: Yes, during the 24-hour data collection session, the Garmin unit was receiving WAAS 100% of the time as far as we could tell. The purpose of the 24-hour test period was to able to randomly sample data during that period to arrive at the accuracy statistics we presented. I randomly sampled the dataset several time
s (averaging 10 seconds worth of positions 200 times) and the results were consistent with what we presented.
Question #26: How does post processing account for ionosphere or troposphere errors if receiver is geographically far away from the base station? If not, does DGPS and WAAS provide better accuracy and integrity?
Whitehead comment: Post Processing using a CORS station would take the nearest station and do differential GPS which cancels common errors in ionosphere and troposphere (ionosphere and troposphere are both temporally and spatially correlated) so if the CORS station is close, there will be good cancellation. If the receiver is far, the algorithms could use a troposphere model to account for the differential troposphere (as was done in the Presentation for BeaconT) and this would probably cancel troposphere so that remaining errors were sub-decimeter level. Differential Ionosphere errors could also be easily modeled with good results. It is likely that the performance could be made to easily surpass SBAS.
DGPS would suffer from the same effects as does post processing, and maybe even more so since a model of differential atmosphere errors is rarely used. SBAS will likely provide better accuracy in situations where you are far from a base station.
Question #27: What is Beacon T?
Gakstatter Comment: While collecting data to present at the webinar, Mike noticed there was a bias in the beacon measurements. The beacon station is located ~184km away at about 7,000 ft elevation while the test site was at about 1,000 ft elevation. Initially, Mike wasn’t modeling the troposphere difference between the base and rover.
To model the troposphere, Mike said he used a troposphere model to figure out troposphere in both locations, and then subtract the two. Although the models are not necessarily that accurate in an absolute sense, the differential tropo between the two locations is fairly accurate using the models. This differential tropo allows the receiver to correct the tropo in the base station differential to make it appear as if it originated in the rover location. Mike said he could’ve done the same for the ionosphere, but he didn’t since that is it usually less of a factor. After using the modified tropo model (Beacon T), the height bias was around 1/2 meter, which could be attributable the ionosphere. The horizontal bias is small, as you can see in the results.
Using this troposphere model resulted in a significant improvement over the original solution.
Question #28: Why is VBS better than WAAS?
Gakstatter Comment: It surprised me too. The receiver used was the same that was used for beacon and WAAS. I contacted OmniSTAR for their opinion.
John Pointon of OmniSTAR responds: “There have been incremental improvements in the VBS service over the years, mostly improvements in modeling and processing. We have added two or three extra reference stations but that hasn’t been the most critical improvement, just helped in some specific areas. These, combined with the relatively benign solar environment, result in VBS accuracy which, although not equivalent to our dual-frequency and multi-system solutions, is consistently better than either Beacon or WAAS.”
Whitehead Comment: In the past, we’ve seen similar performance from both OmniStar VBS and WAAS. Different atmosphere conditions and different locations can affect the performance of both. We’ve seen situations where WAAS is better. It is probably fair to say that OmniStar is more focused on accuracy, whereas WAAS is focused on integrity. It may be wise to do a comparison in the particular area where you operate. Note, however, that in the US, OmniStar is referenced to NAD83 whereas WAAS is references to ITRF so positions reports between the two can differ by several meters.
Question #29: When I look at your scatter plot, I have to ask if short-term point averaging is really effective at achieving more accurate positions?
Gakstatter Comment: I think it’s well accepted that you are wasting time by occupying a point for 180 seconds. That said, there’s something to be said for letting the receiver track satellites for a period of time (1-2 minutes) before storing 5-10 seconds of data. Of course, if the receiver is already tracking satellites, then it’s not necessary to wait. The idea is to let the measurements settle down and take advantage of carrier-phase smoothing if the receiver uses that technique.
Question #30: Could you go into PPP a bit more? How does it work?
Gakstatter Comment: We opened a can of worms by discussing PPP. It’s an entirely different subject that I will cover in a future article. In the meantime, you can read Dr. Richard Langley’s article on PPP here.
Question #31: How do you test the accuracy of SBAS collected data?
Gakstatter Comment: In the U.S., it’s easy. Find a local survey mark using the
National Geodetic Survey website. Printout the ITRF coordinates of the survey mark. If they aren’t on the datasheet, you can convert from NAD83/CORS96 to ITRF using the
HTDP program. Compare the coordinates output by your GPS receiver to the coordinates of the survey mark.
If you’re located outside of the U.S., look for a similar government agency in your country that maintains a record of survey marks. It’s vital that you are comparing coordinates referenced to the same datums.
Question #32: Will there be any disadvantage if we use a EGNOS corrections in Kuwait, if we receive EGNOS?
Whitehead Comment: Kuwait is outside the EGNOS coverage zone, so satellites to the south may not even have Clock and Orbit correctors available, which means the Receiver could not compute a correction for these satellites. Unless the receiver can mix differentially cor
rected ranges with non-differentially corrected ranges, it would likely drop the satellites in the south that had no corrections. This would then reduce PDOP and thus accuracy. Mixing differentially corrected ranges with non-differentially corrected ranges may give worse accuracy than no corrections at all since the SBAS system may have clock or other biases relative to GPS.
By the way, I wish the SBAS providers would get together and share data so that they each could provide world-wide orbits and clocks. Then it would matter less if you were outside the coverage area.
Gakstatter Comment: I’ve heard that EGNOS is planning an expansion to the south and east, so Kuwai may eventually be within the EGNOS coverage footprint. Also, you’ll want to monitor the progress of India’s GAGAN system, which is a similar SBAS. It’s possible you might fall within the GAGAN extrapolated footprint for non-aviation users.
We covered most of the questions posed by the audience. If we didn’t address yours or didn’t provide a complete enough answer for you,
please e-mail me and I’ll do my best to answer you.
As I mentioned above, we had quite a few questions about PPP. It’s a technology that’s worthy of further coverage and discussion. Look for a future article on it.
Thanks, and see you next time.


 In April 2013, announced that DHS and DOT were in the process of analyzing the need for NDGPS. “The response to the 2013 notice was limited, but the responses received were well informed on the NDGPS system, its use, and current and potential applications,” the notice reads. “While a limited number of responders found the broadcast of corrections to be beneficial, no respondents reported the discontinuance of DGPS broadcast to be detrimental or harmful. Ship pilots in particular noted that DGPS can be critical in confined waterways for precise ship-handling maneuvers.”
In April 2013, announced that DHS and DOT were in the process of analyzing the need for NDGPS. “The response to the 2013 notice was limited, but the responses received were well informed on the NDGPS system, its use, and current and potential applications,” the notice reads. “While a limited number of responders found the broadcast of corrections to be beneficial, no respondents reported the discontinuance of DGPS broadcast to be detrimental or harmful. Ship pilots in particular noted that DGPS can be critical in confined waterways for precise ship-handling maneuvers.”

