“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Photo: Space Norway
Norway to get radar assist
Norway’s sea areas are seven times larger than its land area. Now the country is creating a radar satellite system to surveil and locate ships in waters of interest, including the High North. On Aug. 25, Space Norway signed contracts with vendors to build the MicroSAR system, which will launch in 2025. Plans are to make a constellation of radar satellites that can detect small vessels in a large area simultaneously. While the system will use GNSS for orbit tracking, the radar function is independent of GNSS during acquisition. This will solve a flaw in the Automatic Identification System (AIS) now used for maritime surveillance — estimates are that 5% of vessels either do not send out AIS information or are transmitting false information.
Photo: Yandex
Russia’s driverless autos hit the brakes
Russian driverless projects are facing hurdles following the invasion of Ukraine, reports TU-Automotive. For instance, Russian IT giant Yandex had hoped to launch robo-taxis in the United States but has suspended street tests and robotic delivery pilots and laid off employees in its U.S. office. Russian freight carriers are experiencing a shortage of new vehicles and spare parts from Western trade sanctions and countermeasures by the Russian government. Meanwhile, Russia’s pilot tests of connected road infrastructure are still taking place, according to V2X vendor Sreda Software Solutions.
Nathaniel Frissell and team. (Photo: University of Scranton)
Bunches of grapes
A University of Scranton collaborative research project will use daily Doppler shift receiver measurements to study how dawn, dusk and solar eclipses affect the ionosphere. The team, led by Nathaniel Frissell, will use a network of GNSS-stabilized and synchronized high-frequency receivers known as Grapes, developed as part of another National Science Foundation project in 2019. The last solar eclipses to traverse the continental United States until 2044 will occur Oct. 14, 2023 and April 8, 2024. “This project takes advantage of the unprecedented opportunity to study the ionospheric impacts of the 2023 and 2024 solar eclipses and the daily ionospheric variability associated with dawn/dusk transitions,” Frissell said. A better understanding of the effects of ionospheric disturbances is imperative, because the changes affect GNSS navigation and communications systems.
Screenshot: Anonymous TV
Moscow navigation fail
The hacker collective Anonymous managed to disrupt Yandex’s Moscow taxi fleet on Sept. 1, sending dozens of taxis to an address on Kutuzovsky Prospekt. The hacking caused a two-hour traffic jam in the center of Moscow near the Stalinist-era building Hotel Ukraina (Hotel Ukraine), now a Radisson. Hackers likely bypassed Yandex’s safety measures, creating multiple fake orders that prompted drivers to simultaneously go to the same location.
The company tested Driver 2.0, a Level 4 production-ready autonomous driving solution
New video highlights navigating heavy traffic safely and efficiently
Photo: DeepRoute.ai
DeepRoute.ai, an international autonomous driving technology company, has announced the results of its latest fully driverless test of its Driver 2.0 Level 4 production-ready autonomous driving solution.
DeepRoute.ai released a video exhibiting a driverless vehicle retrofitted with the solution on Central Business District roads in Shenzhen, demonstrating its advanced capacity in complex and challenging traffic environments. It was the first legal driverless test in China — Shenzhen unveiled China’s first regulation on intelligent connected vehicles on July 6.
The fully driverless vehicle drove just under 14 miles in one hour, navigating through significant traffic and narrow lanes safely and efficiently. The vehicle:
intelligently maneuvered around double-parked cars and counterflow e-scooters and pedestrians
negotiated with oncoming vehicles to calculate the right timing and trajectory to pass busy intersections
conducted multiple lane changes and unprotected left turns.
“The recent legislation permitting driverless robotaxis in Shenzhen is the first of its kind, a major milestone in advancing autonomous driving technology to wider and faster adoption,” said Maxwell Zhou, CEO of DeepRoute.ai. “As we advance our mission for commercial deployment of autonomous driving vehicles, we will collaborate with automakers to refine our L4 solution to make it as safe and efficient as possible.”
DeepRoute.ai has made significant improvements to achieve driverless capability, with both software and hardware meeting auto-grade standards. The safety mechanism was also upgraded to guarantee driverless safety on the road. In the case of long tail scenarios, the system will alert the remote monitoring center to intervene or take other safety measures.
The Driver 2.0 System
Driver 2.0 includes five solid-state lidar units, eight cameras and other sensors, and a computing platform integrated with its proprietary inference engine. The perception algorithm with sensor fusion can achieve precise object detection up to nearly 220 yards. The planning and control algorithm based on game theory can choose optimal routes and make decisions based on real-time situations when negotiating with oncoming vehicles and other road agents.
With its deep learning approach, the inference engine optimizes compute resources, allowing the algorithm to run on its low-cost and power-efficient computing platform effectively and stably. As a result, Driver 2.0 can be priced at $3,000 for automakers in mass production and the algorithm can work with 2 to 5 solid-state lidars for automakers’ customization needs.
The latest legal and regulatory framework is aligned with autonomous-driving industry developments and is considered the prelude to mass production and commercialization of autonomous-driving vehicles. DeepRoute.ai is working with automakers to mass produce consumer vehicles integrated with Driver 2.0, expected to be available for consumer purchase in 2025. It is also being integrated into robotaxi operations.
According to a report by InForGrowth, the global GPS tracking devices market was valued at $1,567 million in 2018 and is expected to grow at a CAGR of 12.2% during the forecast period 2026.
Increasing demand for fleet telematics and affordable prices of GPS tracking devices are expected to drive the growth of the GPS tracking devices market.
However, the report says, environmental obstacles and non-standard products are expected to impede the growth of the market in the coming years.
The growth of the GPS tracking devices market is attributed to the increasing demand for fleet telematics in the transportation and logistics sector. Government authorities are making rules and regulations for fleet tracking systems in commercial vehicles for improving the safety of passengers, the report said. In addition, vehicle rental companies are deploying an increased number of GPS tracking devices in their fleets.
Next, technological advancements such as self-driving vehicles and connected car technology mainly rely on GPS-based tracking systems for improving the accuracy and reliability of navigation. According to the report, many developing countries, such as India, are focusing on the advancement of their navigation technology. The adoption of 5G communication technology will also help in the advancement of driverless cars technology, which uses GPS tracking devices for movement and route planning.
Finally, the affordability of GPS tracking devices has encouraged market growth, the report said. This in turn has increased competition between manufacturers to develop updated technology-enabled GPS tracking devices.
Growing awareness of the vulnerabilities of GNSS signals — weak, unencrypted and easily jammed or spoofed — have made GNSS less important to steering the driverless vehicle. What’s up with that?
Extensive visual map databases are being created that, when coupled with cameras, radars and lidars on the vehicle and processed by artificial intelligence (AI) algorithms, enable the driverless car to be steered much the way humans drive. Pattern recognition processing in the vehicle allows it to “read” street signs and recognize landmarks, registering its position on the map.
This is the way a person drives in his or her home town, where they always know their orientation and don’t need GNSS. The AI processing “brain,” with access to huge map databases, either through local storage or a network connection, will always be in its familiar home environment: continuously knowing its own position and properly oriented for navigation.
So, will GNSS become unnecessary in the car of the future? Probably not.
First, no one method of navigation is foolproof, and today, GNSS is our primary method of navigating our cars. It is a cost-effective, accurate way of determining position in real time, and with the integration of inertial navigation sensors to handle cases when GNSS is intermittently unavailable, it is improving.
Second, it is not just the car itself that needs to know its location for navigation, but also others outside the car. Ride-sharing apps like Uber and Lyft, car-sharing, usage-based insurance apps, dynamic toll charging, and parking apps all depend on knowing where the car is at all times. GNSS offers sufficient accuracy for all these apps by providing location coordinates. Therefore, a GNSS receiver will most likely remain in the car.
The case for jamming and spoofing
Recall, however, that one of the weaknesses of GNSS is its open, unencrypted format. It is becoming increasingly easier to spoof these signals. Car-sharing, usage-based insurance and dynamic toll charging apps all create a monetary incentive for fraud that can be implemented with a spoofer. For example, a car in a car-sharing network can report a fake position indicating that it is safely parked in a secure area — while in reality, a thief is busy driving it away.
(Image: Orolia)
Let’s assume that all wireless connections to and from the car are secure. This is a reasonable assumption, although recently there have been demonstrations of carjacking via unsecure remote links. Standard SSL encryption, similar to what is used to enter credit card information on the internet, works well here. We have both the awareness and the technology now to prevent such carjackings from ever reoccurring.
However, even if communication links are secure, a GNSS spoofer in the car can fool the GNSS receiver into reporting a fake “safe” position right as it is being stolen. The same is true for insurance or toll apps. And the fraud does not have to be sophisticated. A simple, low-cost jammer can deny proper position just long enough to skirt payment. A secure location method is needed.
Other signals for localization
What would an ideal signal for localizing a driverless car look like?
It needs to be much stronger than GNSS so it is not easily jammed.
It needs to be encrypted so it cannot be spoofed.
It must be ubiquitous, available worldwide.
It must be reliable and robust — with 99.999% availability or better.
It must be practical and priced for the mass-market automotive application.
Though accuracy is always important, the signal used for localization does not have to be as accurate as GNSS is today. Accuracy to 10s of meters is sufficient for all these applications needing fraud protection since it would not be used for steering the car, but rather, only localization. It can also be used in tandem with GNSS to authenticate a reported position when a GNSS signal is available.
Such a signal is available today, worldwide: STL (Satellite Time and Location). Carried on the Iridium satellites, it is a special purpose signal that is more than 30 dB stronger than GNSS and encrypted for anti-spoof protection. Decoding of this signal is available via a subscription model to users.
Here’s how it would work using a car-sharing example. A group of people subscribe to a car-sharing service that provides X number of cars to serve Y number of people, where X is less than Y. The service optimally schedules people when and where a car will be available. The service provider needs to know the whereabouts of the cars at all times to maximize utilization of the fleet, so every car has a GNSS receiver in it.
But to ensure the authenticity of these reports, they also have a secure localization receiver. This receiver is assigned a unique ID that is authorized to decode the encrypted signal. (Eventually, we expect this receiver and GNSS to converge into one device much the way multi-GNSS receivers operate today).
If a position report does not agree with the authentic localization report, the fleet manager can act to recover the car immediately. Insurance providers who cover secure localization-equipped cars would also give preferential rates as an anti-theft device.
(Image: Pavel Vinnik/Shutterstock.com)
Could PRS do it?
The new Public Regulated Service (PRS) from Galileo is encrypted and could provide a similar level of authentication protection, if made available. However, it is still a weak GNSS signal that can easily be jammed. Of course, any signal can be jammed, even one that is a thousand times stronger than GNSS.
However, given the robust nature of a very strong signal, the managing system that is monitoring the cars — the insurance, toll or car-sharing system, for example — can alarm upon the loss of positioning information. Such alarms on a GNSS-only car would be frequent and often erroneous due to simple fades, yielding so many false alarms that it would render the monitoring system useless. But a loss of both the strong localization signal and GNSS would likely be considered suspicious and result in a valid alarm.
GNSS navigation is truly one of the great advances of the modern era, giving us precise time and location for any place in the world. Its two major weaknesses — that it is easy to jam and spoof — can be overcome by augmenting it with other stronger encrypted signals, such as STL, providing robust jam-resistance and positive authentication.
Swift Navigation has released Skylark, a cloud-based GNSS corrections service delivering centimeter-level accuracy without deploying and maintaining a GNSS network. Skylark targets autonomy applications at scale and enables high-precision positioning for mass market automotive and autonomous vehicle applications.
Skylark works with both of Swift’s multi-band, multi-constellation GNSS receivers, the Piksi Multi and the Duro ruggedized industrial receiver. Swift added GLONASS support in its 1.4 firmware upgrade, announced earlier this month, and aims to include Galileo and BeiDou in the near future.
Previously known as a hardware company, Swift Navigation appears to be shifting its focus a bit, including an Internet-delivered service in addition to its GNSS receivers. It has recently focused more closely on the automotive sector; it also has customers in drone technology, robotics and precision agriculture.
Its new platform for high-precision GNSS navigation of autonomous vehicles, via Internet connectivity, Skylark delivers fast convergence times measured in seconds, using positioning algorithms to provide a continuous stream of data to individual devices from the cloud. The data stream allows for quick and robust positioning and high reliability and availability, even in challenging environments, according to the company.
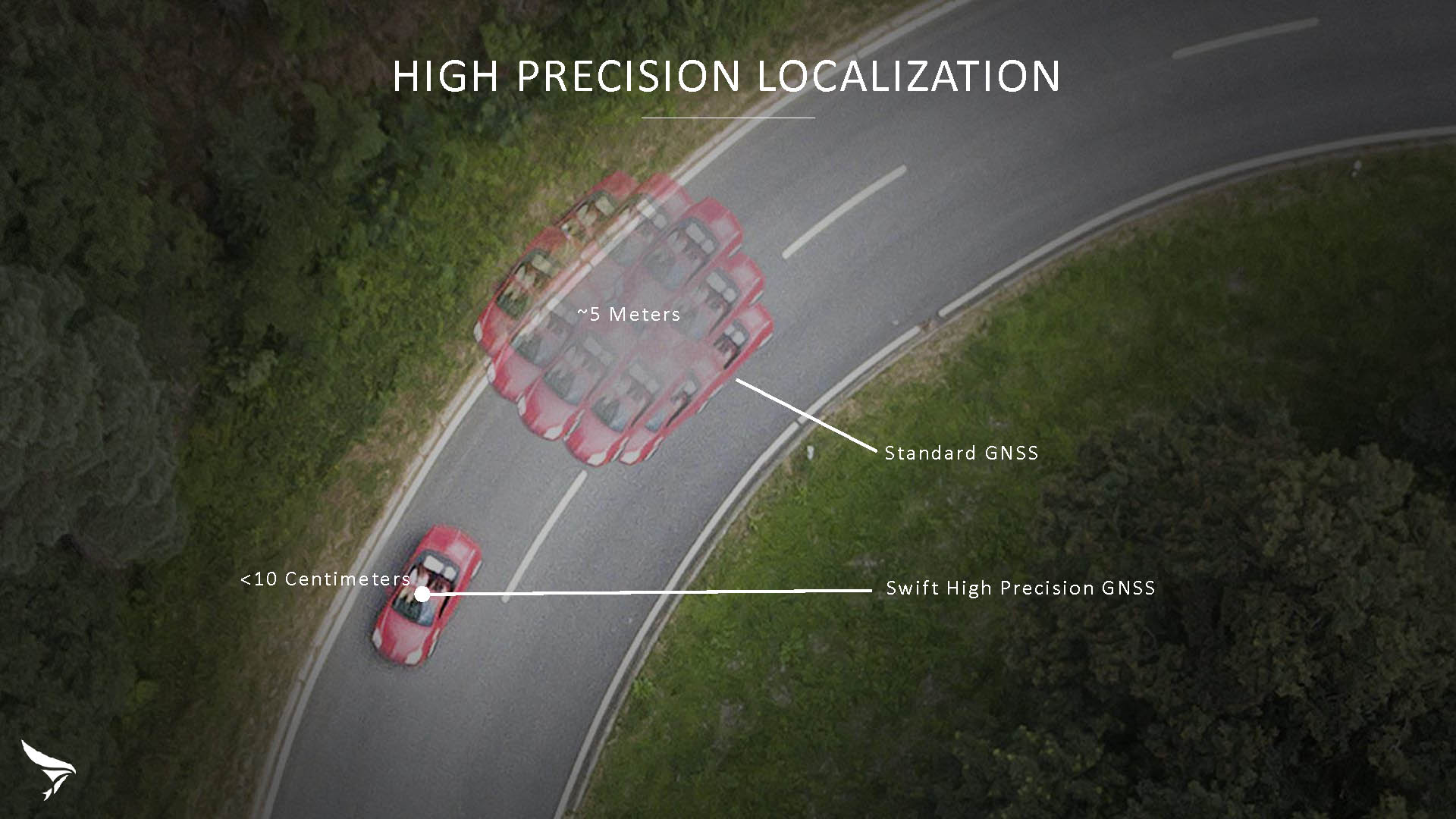
The Skylark service offers accuracy at the centimeter level. (Image: Swift Navigation)
Critical requirements for real-time absolute localization through GNSS for the automotive sector, according to Fergus Noble, co-founder and CTO of Swift Navigation, are:
high accuracy; centimeter level
availability; fast convergence, measured in seconds
integrity
scalability to support a large vehicle population
low cost.
Internet-Delivered via Cell Network
The last two requirements are fulfilled by the cloud-based approach. He characterized Skylark as a hybrid of RTK (Real Time Kinematics) and PPP (Precise Point Positioning) approaches augmented by Swift’s intellectual property, with corrections delivered over the Internet as provided by the cellular network, which he described as “robust to outages.” Cell coverage along road networks is good, Noble asserted, and 5G applications are increasing that coverage and will further enable connected vehicles. Automotive OEMs are comfortable with the level of cell coverage for this application, according to him. There has been testing to show robustness in most rural areas, and network operators are dedicated to increasing this.
“Skylark operates like a utility,” said Noble. “It is a simple, low-cost Internet data stream that provides customers with a complete high-integrity GNSS solution. Simply supply a Swift receiver with power and Internet connectivity and get real-time corrections for highly-dynamic GNSS applications.”
To realize the Skylark service, the company hired a team of cloud-based engineering experts who had a role in building Amazon and Oracle critical infrastructure. Swift Navigation is initially launching only with its own devices, but is making the service publicly-available for any customer in any vertical requiring precise positioning. “Every car company is building in autonomous functionality,” noted Noble, making clear who the company is ultimately targeting.
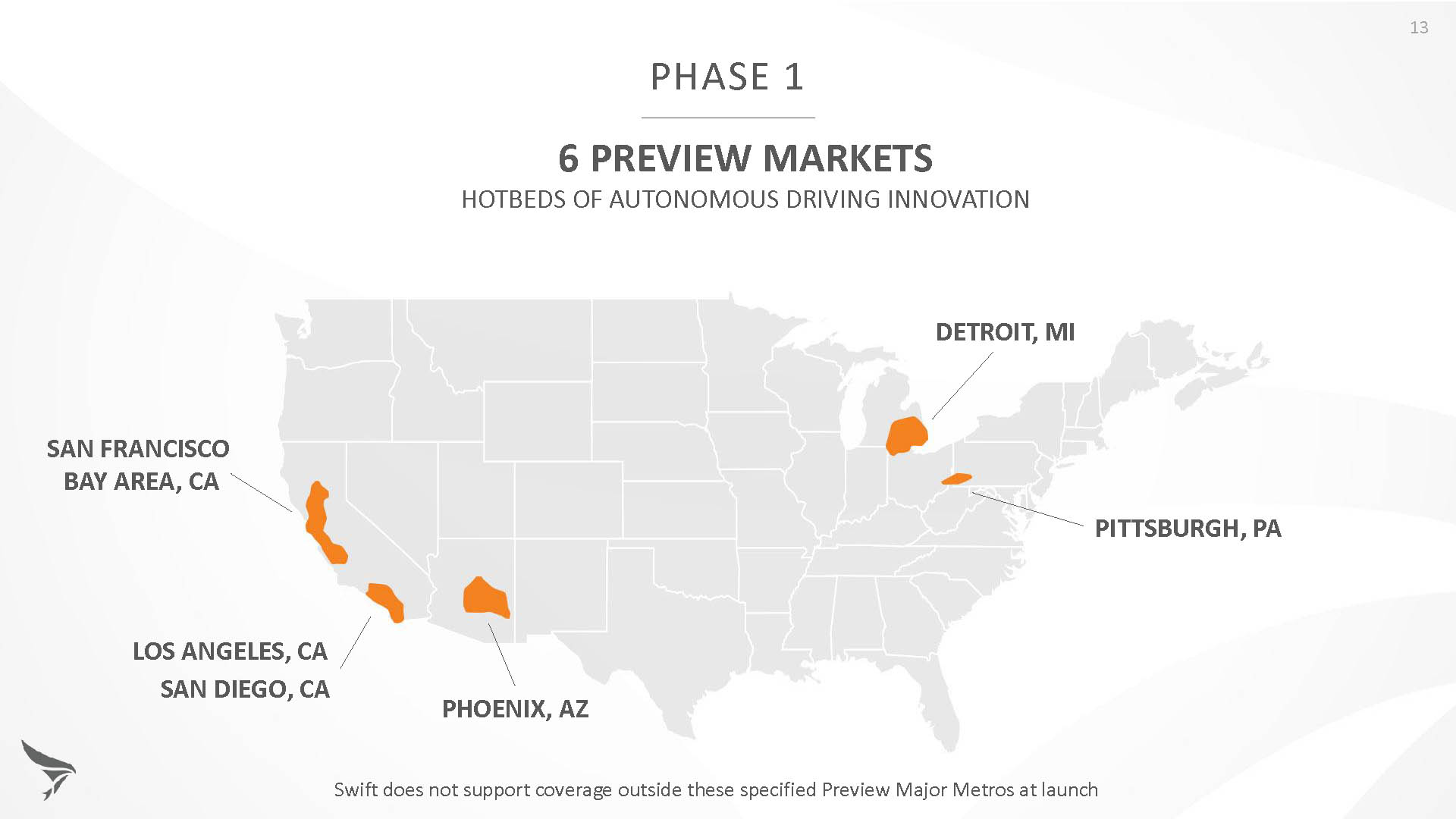
Skylark is currently offered in six metropolitan markets. (Image: Swift Navigation)
Swift has been working with beta customers for more than a year and is now previewing the service to all customers in six metropolitan markets: the San Francisco Bay Area, Los Angeles, San Diego, Phoenix, Pittsburgh and Detroit. The company envisions full contiguous U.S. and ultimately global expansion. Customers in preview areas with Swift receivers can sign up for Skylark and immediately start receiving corrections.
The service maintains low bandwidth to save on data costs and is offered with a free 30 day trial and flexible pricing plans. Skylark’s pricing structure includes a monthly plan and an annual plan. Enterprise pricing is available for volume orders.
Voyage Self-Driving Car Active Service and Coming Expansion
An early beta user of the service, Voyage deploys self-driving taxis in private communities across North America. “Skylark and Piksi Multi are working safely and efficiently in a real-world application today at The Villages, a retirement community in San Jose, California,” said Oliver Cameron, co-founder & CEO of Voyage.
Voyage incorporates Skylark GNSS corrections in controlled road networks in private communities. (Image: Swift Navigation)
Voyage’s passenger cars carry a roof-racked suite of sensors: the Swift Navigation Piksi Multi GNSS receiver, LiDAR, cameras, radar, and an inertial measurement unit. A computer in the trunk integrates all sensor signals and uses the car’s CAN bus to operate steering, braking, and other functions. An operator sits behind the wheel at all times, sometimes with a co-pilot: one to watch the road ahead, and one to watch the software. “Safety is our first priority,” said Cameron.
The service is especially valuable to customers with mobility limitations that might prevent them from walking to an event or moving within the community. (Image: Swift Navigation)
The Voyage fleet stays within the bounds of a given community, where all roads have been precisely mapped, speed limits are lower and traffic patterns are more clearly defined than in metropolitan cities. The first in the San Jose area serves private community of more than 4,000 residents, with a 15-mile road network. Today, residents are able to summon a Voyage self-driving taxi using a smartphone app and have a ride waiting at their front door. This service is especially valuable to customers with mobility limitations that might prevent them from walking to an event or moving within the community. Voyage takes residents of The Villages to and from the gym, to visit with friends, to the golf course and to community center events.
Image: Swift Navigation
Voyage will next deploy the Swift product suite in its upcoming deployment launching to 160,000 retirees at The Villages complex in Florida, over a road network of 750 miles. It is currently in a “Q/A” testing phase on that site, working the technology and the local mapping through their paces.
Helix Technologies Ltd., a U.K.-based developer of high-performance, ceramic-based helix antennas, has secured funding that will enable continued development of antennas for a wide range of applications including autonomous vehicles, drones, internet of things and machine-to-machine communications.
Photo: HelixAntenia
The company closed its Phase B funding round with GBP 650,000 of financing provided by private investors.
The company said that the driverless car segment, both GNSS and vehicle-to-everything (V2X) dedicated short-range communications (DSRC) applications, represents the most immediate and compelling need and business opportunity for its helix antenna technology.
Helix Technologies said its dielectric-loaded helix antennas will provide significant performance advantages over incumbent antenna technologies for next-generation GNSS and V2X applications.
The use of a dielectric ceramic core gives its antennas unique properties including unsurpassed gain/efficiency per unit of volume and more effective and predictable behaviour in a wide range of challenging user scenarios.
“We are grateful for the support of our investors which allows us to develop innovative solutions for this exciting growth market,” said John Yates, managing director of Helix Technologies. “The first self-driving cars are widely forecast to be on the market between 2019 and 2021. Any navigation and communications equipment used onboard will have to fulfil the highest-possible standards on safety, integrity and accuracy.”
The company expects to have prototypes of its V2X DSRC antenna available by the second quarter of 2018 and its NEXTGEN GNSS antenna by the third quarter of 2018.
According to the company, the use of the ceramic core enables the fabrication of antennas that are physically smaller than conventional antennas, behave much more effectively and predictably in a wide range of challenging user scenarios and have many compelling technical advantages which include:
Maintaining radiation efficiency near absorbing objects (such as the human body)
Improving the accuracy of GNSS systems in multipath environments (such as in cities)
Operation in sub-optimal orientations towards the sky
Are able to be placed into very tightly integrated systems
Operation in slim devices without a ground plane
Unsurpassed gain/efficiency per unit of volume
Simple and robust design and construction for durability and reliability
Most activity so far in the PNT community has centered around the questions of “Where am I?” and “Where am I going?” and “How fast am I going?” Positioning, navigation and timing. Seemingly that should about cover it. But no.
Mapping comes into the picture: “What fixed objects are in my environment?” This is actually a corollary of “Where am I?” though let’s not put too fine a point on it.
All this “I” business. To get to driverless cars and other autonomous vehicles, we will have to look beyond the first person singular, what some researchers call “the ego vehicle.” We must know, with a high degree of precision and certainty, “Where are other moving vehicles?” and “Where are they going?” and “How fast are they moving?” Another order of magnitude, if not several. PNT squared, as it were.
In the fast oncoming intelligent transportation systems (ITS), future driving (very much present and evolving now) will rely on accurate, reliable and continuous knowledge of the position of other so-called road participants. That’s not just cars, trucks, motorcycles and buses, but includes pedestrians and bicycles and who knows what else — skateboards?
The first approaches to this requirement use on-board ranging sensors such as camera/vision systems, radar, laser scanners and more. (Some of this “more” is explored in this May’s print cover story, “Look Around.”) This already calls for a significant level of integration with GNSS and inertial systems of the ego.
But it’s still not enough. A cooperative approach must develop, in which the other road participants actively support the continuous estimation of all relative positions. Not only must they have all the sensors the ego possesses, they must continually communicate all that data with the ego, and conversely. This is what’s called “connectivity.”
It’s almost as if vehicles are becoming sentient, expressive beings. A bit like us. Bringing new meaning to the expression “the automobile as an extension of the self.”
All poll takers will be entered in a drawing for a $50 gift card.
____________
Meanwhile, here’s a preview of the V2V Countdown article from the May issue, introduced by Chaminda Basnyake, an engineer at Locata Corporation:
The U.S. Department of Transportation (USDOT) released a Notice of Proposed Rulemaking (NPRM) in December 2016 for the deployment of Dedicated Short Range Communications (DSRC)-based vehicle-to-vehicle (V2V) safety applications as part of the connected vehicles (CV) and automated vehicles (AV) initiative. If all goes well, this mean a V2V deployment mandate for new passenger vehicles likely starting in 2021 and reaching all new vehicles within 2–3 years.
Standards required for V2V deployment were published in 2016 or before, including the V2V Minimum Performance Requirements SAE 2945/1, leading the way for commercial product development. The USDOT, which has been the catalyst behind V2V industry R&D starting from the automaker collaboration CAMP (Crash Avoidance Metrix Partnership) in 2001, is conducting CV Pilot programs in New York, Wyoming and Florida. These offer the opportunity for state DOTs, vendors and all other stakeholders to test the technology in real-life scenarios.
Automotive OEMs have been developing this technology for more than a decade, and the NPRM is the beginning of a race toward integrating V2V to production vehicles. Deploying V2V technology requires the close cooperation of OEMs, their suppliers and many other stakeholders.
This article captures the views of major players in the CV marketplace on expected deployment timelines, remaining challenges such as reliable positioning technology, integration with existing systems, and the implications on AV technology.
NVIDIA and TomTom announced they are partnering to develop artificial intelligence to create a cloud-to-car mapping system for self-driving cars.
The work combines TomTom’s HD map coverage, which spans more than 120,000 kilometers of highways and freeways, with the NVIDIA DRIVE PX 2 computing platform. Together, the solution accelerates support for real-time in-vehicle localization and mapping for driving on the highway.
“Self-driving cars require a highly accurate HD mapping system that can generate an always up-to-date HD map in the cloud,” says Rob Csongor, vice president and general manager of Automotive at NVIDIA. “DRIVE PX 2 for AutoCruise provides TomTom with a real-time, in-vehicle source for HD map updates.”
The NVIDIA DriveWorks software development kit now integrates support for TomTom’s HD mapping environment. The open solution is available for all automakers and tier 1 suppliers developing autonomous vehicles.
Low-cost, precision GNSS receivers will become a reality in the driverless car, drone and even smartphone markets by 2021, finds ABI Research. The automotive industry will be the main driver behind precision GNSS receiver adoption, in which centimeter-level accuracy is essential to complete driver safety systems with the redundancy necessary for autonomous vehicles.
“There is a variety of competing technologies currently under investigation by the automotive industry, but ABI Research forecasts it will move to a hybridized approach, combining LIDAR, HD maps, sensor fusion, machine vision and precision GNSS,” says Patrick Connolly, principal analyst. “As the receivers’ average selling price drops below $50, we expect to see a more immediate market for location technology services, such as AR Heads Up Displays (HUDs), in high-end vehicles. Vehicle-to-Vehicle, or V2V, communication might constitute another use case for high-precision GNSS.”
In addition to autonomous vehicles, the report also identifies opportunities for low-cost, precision GNSS receivers in autonomous unmanned vehicles (AUVs), as well as commercial and consumer devices. Though the average selling prices of such GNSS receivers is $1,000 and higher, ABI Research finds the cost to be one of the most addressable inhibitors to market growth today.
“Precision GNSS achieves sub-meter accuracy through a variety of methods, including a network of reference stations,” Connolly says. “The biggest question mark today is not cost-related, but instead how to achieve reliable, worldwide satellite navigation coverage to support correction techniques, such as real time kinematic, or RTK, and precise point positioning, or PPP. This is an extremely expensive undertaking, with currently no guarantee of a return on investment.”
Competition in the location technologies market ranges from crowdfunded startups to Internet giants, reflecting the scale of the opportunity. Traditional precision GNSS receiver vendors like NovAtel have the intellectual property, engineering experience and ownership of correction networks.
In the consumer GNSS receiver market, u-Blox and Skytraq lead the way, according to the report. Each developed low-cost single frequency PPP and RTK receivers, with a clear roadmap toward dual-frequency. Other consumer GNSS providers, like ST Microelectronics, Broadcom and Qualcomm, also appear active in this space.
Start-ups like North Surveying, NVS Technologies, REACH, and Swift Navigation continue to disrupt the industry, bringing low-cost precision receivers to market, said ABI Research. Their goal is to hit an ASP below $100 in the near future. And Radiosense is a startup that received a lot of attention for its previous work concerning precision GNSS on smartphones. It is now working on automotive solutions in a pilot in Austin, Texas.
Locata has the potential to be the wildcard in the deck, working on a powerful synchronization and location technology that may find its way into consumer technologies by 2021.
“Most interesting in the location technology competitive landscape is the involvement of Internet giants Google and Alibaba,” concludes Connolly. “Google recently announced it will make GPS pseudoranges available to developers, which, although extremely nascent, could open up the door for a lot of innovation. And in China, Alibaba is a major partner in the roll-out of Continuous Operating Reference Stations, or CORS, networks in the region.”















 How about 2032? 2035 or after?
How about 2032? 2035 or after?