
This month, we look at new applications that might interest even the most tech-savvy. From military Reaper unmanned vehicles being turned into civilian fire-fighters, through continuing drone flights on Mars, to e-scooters monitored by AI-system, the autonomous arena continues to grow.
Reaping Disaster-Response Benefits
The General Atomics Reaper unmanned aerial vehicle (UAV) is usually a weapon of war. Most of us picture them loaded with missiles to be fired on terrorist hideouts, with video of the impact appearing on the six-o’clock news. Soldiers in small control shacks guide these worldwide attacks, while politicians watch the outcomes remotely with their own direct TV coverage. This is how we tend to think of these destructive systems.
However, Reapers recently have been helping fight the huge fires devastating the California landscape — a more humanitarian, supportive role for a military asset.

The California Air National Guard (ANG) has been assisting firefighters for many years by using helicopters and fixed-wing aircraft to determine the intensity of large California fires and to plot their boundaries.
In the past 10 years, with the availability of large reconnaissance UAVs and assistance from the Federal Aviation Administration to develop and approve operational procedures, an approach has been formulated to employ Reapers, with the potential to reduce costs and greatly improve response times.
Having large UAVs at altitude in civilian airspace requires an accompanying chase plane to ensure safe operation. With proven onboard detect-and-avoid capability and visibility through crew monitoring, the chase aircraft only monitors the Reaper’s climb to operational altitude. Using infrared and video from onboard cameras, data is downlinked and post-processed to create fire maps. Artificial intelligence (AI) automates this procedure to provide incident commanders with a near-real-time situational overview.
Besides mapping the fire, the incident commander can keep track of firefighters on the ground and gain a clearer picture of the fire’s intensity, rate of growth and direction. With a high altitude view of the landscape, Reaper pilots also help determine the best evacuation routes. Video downlinks provide real-time fire dynamics to commanders and even to firefighters on the ground who carry handheld devices.
When equipped with long-range fuel tanks, Reapers can remain on task for up to 18 hours. The pilot and systems operator in their remote mission-control shack can hand over control to a new crew for such a long mission. The new crew can even be in a different location when it assumes control.
The experience gained in California regarding flight approvals, operations and use of data is being shared with remote UAV crews and emergency-response controllers in other U.S. jurisdictions as well as other countries. The procedures can be used not only for firefighting, but also for earthquake, flooding and hurricane response.
Our Martian Adventure
NASA has extended the mission on Mars of its Ingenuity UAV, which arrived on the planet attached to the belly of the Perseverance rover. The original mission was to establish that controlled flight on the planet’s surface was possible.
Ingenuity has now spent more than one year on the surface of Mars and has 21 flights under its belt. The diminutive copter has taken on an extended role of scouting out potential routes for its SUV-sized mother ship.
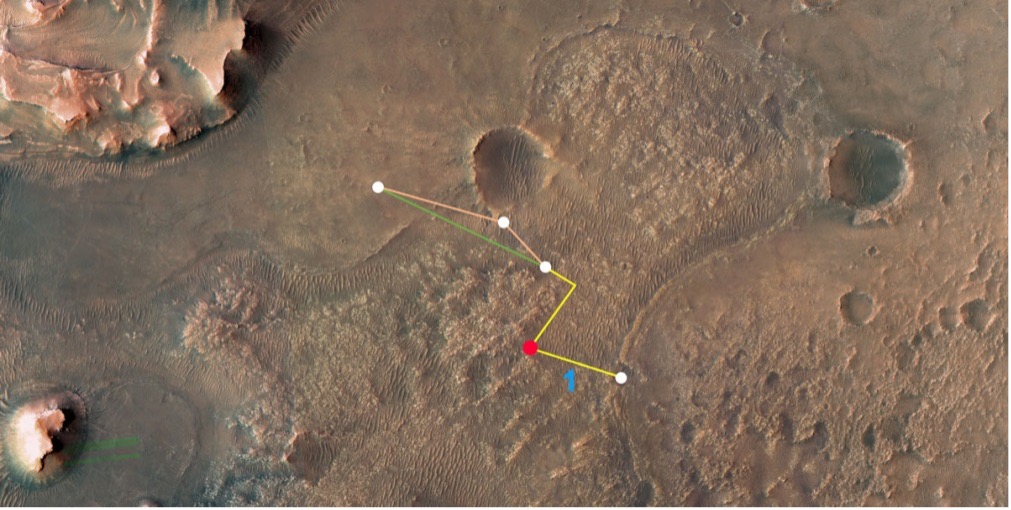
Ingenuity’s 21st flight is the first of at least three needed to transverse the Séítah region to reach its next base. From there, it will make flights to examine an old river delta. The whole relocation trip will cover about 1,150 feet as Integrity navigates around a large hill. While flying these investigative routes, the NASA team continues to gently push the drone’s capabilities to better understand improvements that can be applied to future Mars UAV designs.
Once at the river delta, Ingenuity will encounter higher ground — up to 130 feet above the floor of the Jezero Crater, where it previously flew. The new area is expected to present significant obstacles: jagged cliffs, angled surfaces, rocky outcroppings and sand-filled traps. These obstacles could hamper the Perseverance rover or tip over the small drone on landing. But it’s also a place NASA thinks could harbor evidence of past life.
On arriving at the delta, Ingenuity’s first task will be to help decide which of two river channels Perseverance should take to climb to the delta. Data from the drone will also pick out science targets that Perseverance could investigate on the way. Once established in the delta region, NASA also hopes to fly Ingenuity to scout other features the rover might not be able to reach, but which might be accessible on future missions.
NASA has uploaded several upgrades to Ingenuity. They enabled higher, faster and longer flights and speed changes. The upgrades also have improved the drone’s perception of landing areas. Potential upgrades include adding terrain elevation maps and a hazard-avoidance capability for safer landing.
E-Scooters Adopt Pedestrian Defense
An outfit that rents e-scooters in more than 60 cities worldwide is adopting a “pedestrian defense” AI upgrade to prevent renters from abusing others around them and keep them riding within acceptable rules of operation.

Previous efforts have only give riders visual and audio warnings that they should not enter a sidewalk. This new e-scooter active defense system slows the scooter to a stop and will not allow it to resume operation until it is moved outside the prohibited area.
Other unsafe behaviors — riding the wrong way up one-way streets, parking in the wrong place or aggressively swerving — also can be detected and actively deterred.
Sensors on the scooter provide data that relates location and activity to onboard stored city maps and geofenced areas. This enables application of enforcement commands within a second of them being detected.
The system provides cities and operators with visibility for the whole fleet of scooters. It shows what renters are doing within existing street safety restrictions, allowing both city and rental company officers to address perceived operational issues.

