(fFrom left) Congressman LoBiondo, UrsaNav CEO Chuck Schue and Harris Division President Pam Drew. (hoto Credit: Andrei Grebnev, UrsaNav)
As of June 19, eLoran is on the air in the United States. The low-frequency signal emanates from a single station, a former U.S. Coast Guard Loran Unit in Wildwood, N.J., which sports a 625-foot signal mast that has been out of action for five years. The signal is receivable at distances of up to 1,000 miles.
The facility began generating eLoran pulses at the press of a command button by Congressman Frank LoBiondo (R, N.J). Present for the ceremonial start of a 12-month demonstration and research program under the aegis of the Department of Homeland Security were project participants Charles Schue, CEO of UrsaNav; Pam Drew, president of Harris Information Systems; and Dana Goward, president of the Resilient Navigation and Timing Foundation.
Brief remarks delivered at the turn-on collectively made the key points that:
GPS services are essential to national and economic security, yet are vulnerable to disruption.
The eLoran navigation and communications signal has features that are complementary to GPS, making it difficult to disrupt; further, it could be an important part of enabling UAVs to fly safely in our airspace.
The U.S. Federal Radionavigation Plan cites not being critically dependent upon a single system for positioning, navigation, and timing as a national policy objective. The plan specifically identifies eLoran testing as an important step toward reaching that objective.
The two engineering companies, UrsaNav, a supplier of eLoran technology, equipment, and services, and Harris (which recently acquired Exelis), provide funding and technology for the tests supported by the U.S. Coast Guard, Department of Defense, Department of Homeland Security and other federal agencies under a Cooperative Research and Development Agreement (CRADA) announced in May.
The team will evaluate eLoran as a potential complementary system to GPS, exploring the capabilities and use methods of eLoran in depth to identify all strengths, capacities, and potential vulnerabilities of the technology. One goal of the CRADA is to reduce the size, weight, cost, power needs and other aspects of Loran, similar to what has evolved with GPS.
“This is a phoenix arriving. We have the opportunity to add 2015 technology to the older idea,” said Schue of UrsaNav, once Coast Guard commanding officer at the former Loran station. “A prudent mariner always has two systems to navigate.”
Dana Goward, also a retired Coast Guardsman whose non-profit Resilient Navigation and Timing Foundation is working on the project, stated that eLoran can attain positioning accuracy of six meters or better.
“We will explore many places eLoran can be deployed where GPS isn’t available such as deep canyons, through buildings, in foliage and under water,” added Harris Corp.’s Drew. “We’re involved with unmanned aerial drones, and eLoran could be key. There are applications for civilian and military uses.”
In this GPS World exclusive video, Admiral Thad Allen, former commandant of the U.S. Coast Guard, discusses PNT alternatives to GPS for navigation, including eLoran and the activation this week of the signal on the eLoran tower in New Jersey.
eLoran in Europe
Matters have moved a little further along in Europe. In 2013, the General Lighthouse Authorities of the UK & Ireland (GLA) established prototype eLoran Initial Operating Capability (IOC) in the United Kingdom, where eLoran now delivers PNT data at the 10-meter level from a network of high-power, low frequency, terrestrial transmitters.
“To get high accuracy from eLoran requires accurate calibration of Additional Secondary Factor (ASF) through measurement,” according to paper delivered at the Institute of Navigation’s 2015 Pacific PNT meeting. “Can eLoran Deliver Resilient PNT?” was authored by Nick Ward, Chris Hargreaves, Paul Williams, and Martin Bransby of the GLA.
The older Loran-C system suffered from significant positioning bias errors due to a number of radio frequency signal propagation delay factors, they write. “The Primary Factor (PF) is due to the signal travelling slower in air than free-space, the Secondary Factor (SF) is due to the presence of the Earth’s surface and the electrical properties of the oceans. Additional Secondary Factor (ASF) is due to the additional electrical resistance encountered by non-seawater terrain, land, mountains, deserts, and so on. PF and SF can be modeled, but to get high accuracy from eLoran requires accurate calibration of ASF through measurement.
“To do this,” they continue, “ASF surveying and mapping has been conducted along the port approach channels at Aberdeen; along the Firth of Forth; Middlesbrough; Hull and the Humber Estuary Traffic Separation Scheme (TSS); Harwich and Felixstowe; The ports of London, Medway and the approaches past the London Array wind-farm and also through the Dover Straits.
“To complement these services, seven differential-Loran (DLoran) Reference-Stations, one located close to each of these survey areas have been established. These stations monitor the time of arrival of the received eLoran signals, and generate differential-corrections that are broadcast via the Anthorn Loran Data Channel (LDC), to account for temporal variations in these ASF maps.
“Making use of these ASF maps, combined with the locally-produced differential corrections, can allow a maritime user of eLoran IOC to obtain position accuracy of the order of 10m (95%), within a radius of 30 to 50 km of the DLoran reference station.”
eLoran can deliver Resilient PNT and this has been demonstrated on several vessels.
Seamless handover from primary (GPS) to secondary (eLoran) positioning source has been successfully implemented.
Surveying and mapping of ASF has been carried out for several major ports and the required levels of performance demonstrated.
DLoran reference stations to correct for short-term, temporal variations have been installed and commissioned.
Good levels of performance have also been demonstrated for coastal voyage phase away from the ASF surveyed areas.
eDLoran in Rotterdam. The July 2014 issue of GPS World presented a cover story showing results of a newer version, enhanced differential Loran (eDLoran), yielding position accuracies of approximately 5 meters.
Potential GNSS Back-up Improves to GPS-Level Accuracy
A new enhanced differential Loran system demonstrates 5-meter accuracy not achievable by the current DLoran system, and requires less expensive reference stations. A prototype tested in Rotterdam’s Europort area uses standard mobile telecom networks and the Internet to reduce correction data latency — a key source of error — by one to two orders of magnitude.
By Durk van Willigen, René Kellenbach, Cees Dekker, and Wim van Buuren
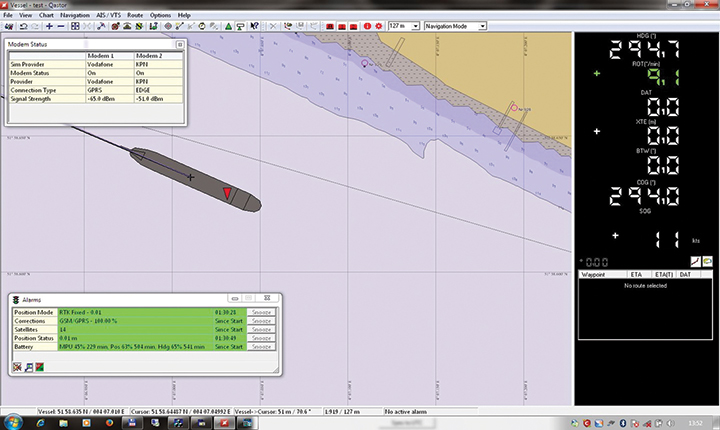
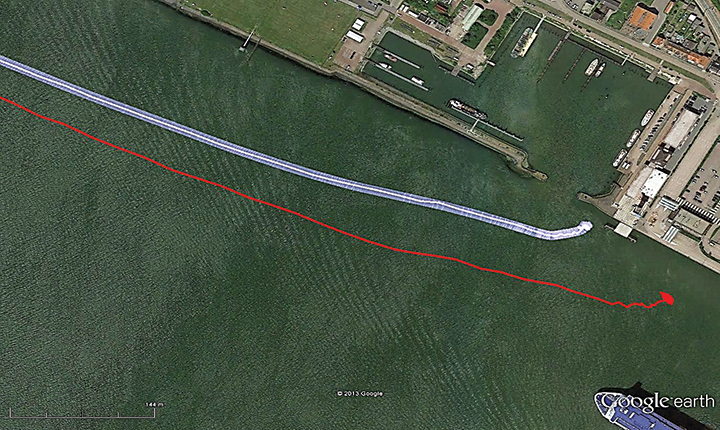
Figure 12. The large ship symbol (grey) is derived from the GPS-RTK receiver of the Rotterdam pilots. The width of the ship symbol is 10 meters and the speed-over-ground was 11 kts. The red triangle is generated by the eDLoran receiver and remains between the required ± 5 meter limits for eDLoran.Figure 13. The red track is based on raw eLoran data without any corrections. The transparent blue line is made by GPS-RTK and is widened to 10 meters giving the required ± 5 meter limits of eDLoran. The white line is output from the eDLoran receiver which stays within the borders of the 10 meter wide transparent blue line.
The GLA authors from the UK give a perspective on the Rotterdam project, as follows:
“A compatible system (eDLoran) has been developed for operation by ships’ pilots on the Europort approach to the Port of Rotterdam.
“However, Loran is a regional system dependent on international collaboration. The 9 transmitters in northern Europe are operated by Denmark, France, Germany, Norway and the UK.
“Both Norway and France have declared an intention to cease Loran transmissions at the end of 2015. Moreover, France intends to dismantle its Loran infrastructure in 2016. Arrangements for the commercial operation of the infrastructure are being investigated, but this depends on some form of regional agreement. The European Union appears to have no policy for resilient PNT, the European Radio Navigation Plan having twice been drafted but never published. The view seems to bee that the introduction of Galileo will achieve resilient PNT, which it will not.”
And Elsewhere
South Korea is implementing a national eLoran service, and it is understood that similar plans are being considered in Russia and China.
Potential GNSS Back-up Improves to GPS-Level Accuracy
A new enhanced differential Loran system demonstrates 5-meter accuracy not achievable by the current DLoran system, and requires less expensive reference stations. A prototype tested in Rotterdam’s Europort area uses standard mobile telecom networks and the Internet to reduce correction data latency — a key source of error — by one to two orders of magnitude.
By Durk van Willigen, René Kellenbach, Cees Dekker, and Wim van Buuren
For maritime applications, Loran is considered as the most promising backup for GNSS for situations where the use of navigation satellite signals is denied. For this reason, the Dutch Pilots’ Corporation askedReelektronika to investigate whether differential Loran could meet the Dutch Pilots’ 5-meter accuracy requirement for a harbor navigation system. This proved to be an enormous challenge, as preliminary tests showed that even 10 meters was difficult to achieve with differential Loran (DLoran) as promoted by Trinity House, the UK lighthouse authority. This led to a thorough renewed investigation of all possible error sources of a complete differential Loran system. The outcome of this research is very promising, as a couple of major error sources could be isolated. This made the complete system better understandable, so adequate countermeasures could be taken.
Loran History
The development of Loran-C started in the United States about fifty years ago. It is a terrestrial low-frequency (100 kHz) system organized as chains, each consisting of a master station with two or more secondary stations. Each station broadcasts in a strict time format series of 8 or 9 pulses of approximately 250 µs. The effective radiated power is in the range of 100 to 1,000 kW, depending on the required working range. These high powers are required by the high levels of atmospheric noise in the 100 kHz frequency band.
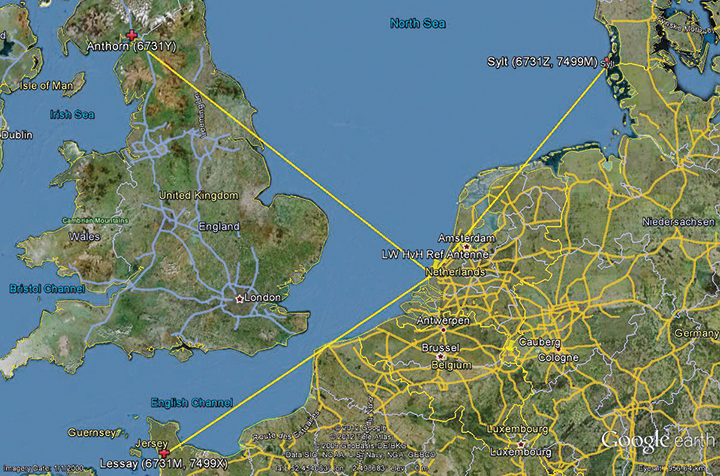
Figure 1 shows the test area of enhanced Differential Loran (eDLoran), using the Loran stations of Lessay (France), Sylt (Germany), and Anthorn (UK).
Figure 1. The Loran configuration in the test area of Europort.
Radiating such high-power pulses requires large vertical transmitting antennae of about 200 meters height (Figure 2). These high power levels have long been seen as a drawback of Loran-C. However, the upcoming GNSS interference risks changed this apparent drawback into an advantage, as jamming such high field strengths is hardly achievable unnoticed. Loran-C is, unfortunately, less accurate than GNSS but it is nearly impossible to jam over large areas. This is one of the major reasons that Loran gets so much renewed interest by all who face risks in life-critical and environment-critical applications of radio navigation.
Figure 2. Left, the antenna park of 13 masts of ≈200 meters at Anthorn, UK. Right, the 200-meter mast at Sylt, Germany.
Differential Loran
Standard Loran does not meet accuracy requirements for harbor entrance and approaches. The International Maritime Organization requires 10 meters (95 percent), which is at least 5 times more demanding than standard Loran can provide. So, differential techniques have been developed and implemented, which are comparable with differential GPS. Although the error sources of GPS and Loran are quite different, the major common error source in both systems is the lack of accurate propagation models.
Several years ago, the General Lighthouse Authorities (GLAs) of the UK and Ireland implemented Differential Loran (DLoran) in the test area around Harwich. DLoran is based on a Loran reference station in the area of interest which measures temporal deviations of the measured pseudoranges. These “errors” are then sent to the user receiver through the Eurofix Loran Data Channel. This technique strongly resembles that of differential GPS. Unfortunately, for a number of reasons it proved to be impossible to achieve absolute accuracies of better than 10 meters with DLoran.
This has led to a new research project to find a more accurate differential Loran technique. All possible error sources have been investigated again where possible, producing unexpected solutions regarding accuracy and cost.
Error Sources
The total position error of Loran depends on the accuracy in time of the high-power generated Loran pulses feeding the antenna, the stability of the physical phase center of the Loran transmitter antenna, stability of the tuning of the antenna circuit, the accuracy of the measured additional secondary phase factor stored in the Additional Secondary Factor (ASF)database, and the quality of the Loran receiver. ASF is the additional delay when Loran signals propagate over land with a varying conductivity. As the ASF data are not fixed but vary slightly over time, temporal de-correlation, differential techniques have been developed to counteract that effect. In standard DLoran systems, the differential corrections are sent to the user through the Eurofix data link. Particular error sources include:
Transmitter Timing Accuracy. A Loran transmitter sends about 100 pulses per second. Each station has three cesium clocks time-synchronized to Coordinated Universal Time (UTC) via a time-transfer network. A two-way satellite time-transfer system will make it simpler and more accurate.
Antenna Phase-Center Stability. Loran transmitter antennas are vertical towers approximately 200 meters high to provide vertical polarization. Its phase center, at the published position, does not move more than about 1 meter according to the station crew at Sylt.
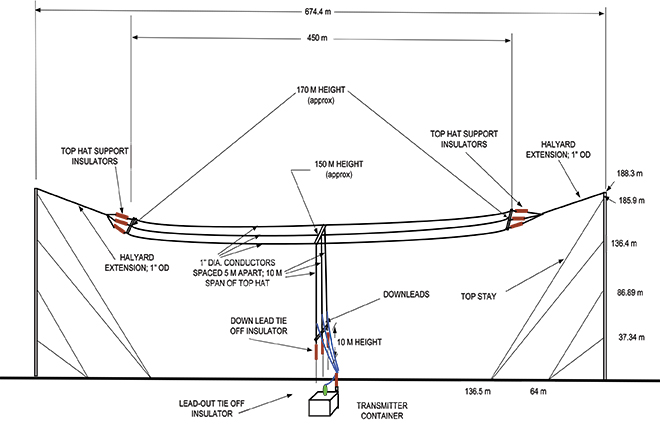
This situation is very different for a wire antenna as installed at the station at Anthorn in Northern England. The top-loaded wire antenna is installed between two towers 200 meters tall and separated by 675 meters (Figure 3). In stormy weather, the antenna position is not stable and does not continuously coincide within 1 meter of the published position of the antenna.
Figure 3. The enormous top-loaded Loran wire antenna at Anthorn. This type of antenna is not rigidly stable during storm. By courtesy of Babcock International Group.
ASF Data. The net travel time of the Loran signal from the transmitter to the receiver antenna is the sum of the propagation through the atmosphere (primary factor or PF), some extra delay due to traveling over seawater (secondary factor or SF), and finally ASF. The PF and SF are calculated from models, while the ASF must be measured. These calculations can only be accurate if the net travel time can be accurately determined and the distance between transmitter and receiver can be calculated with the help of GPS-RTK. The time stamps of the signal when leaving the antenna are not sufficiently accurate. The time stamps on the received signals are established by using a GPS-disciplined rubidium (Rb) clock. In conclusion, we cannot accurately measure and compute the absolute ASF values. All mentioned possible errors led to the use of differential techniques.
Differential Loran
As it is not possible to measure ASF data to sufficient accuracy, time-stamp errors at the transmitter can be circumvented by applying differential techniques over a limited area of interest. The receiver at the reference site and the rover receiver experience the same transmitter timing error, which makes it a common error and harmless in differential Loran. It is more difficult to cope with the offset of the Rb clocks at the reference and the rover sites, which is, unfortunately, not common-mode. Differential clock errors of a moving rover receiver may easily rise to 20 ns, equivalent to 6 meters. This type of error limits the achievable accuracy of an ASF data base.
The measured/calculated ASF data are due to weather effects on propagation slightly moving with time. That is the reason to use a reference receiver to measure these temporal variations and send these as AFS corrections to the rover receiver via the 30 bps Eurofix data link. Unfortunately, this rather slow data link introduces significant data latency, which turned out to be the source of significant differential Loran errors.
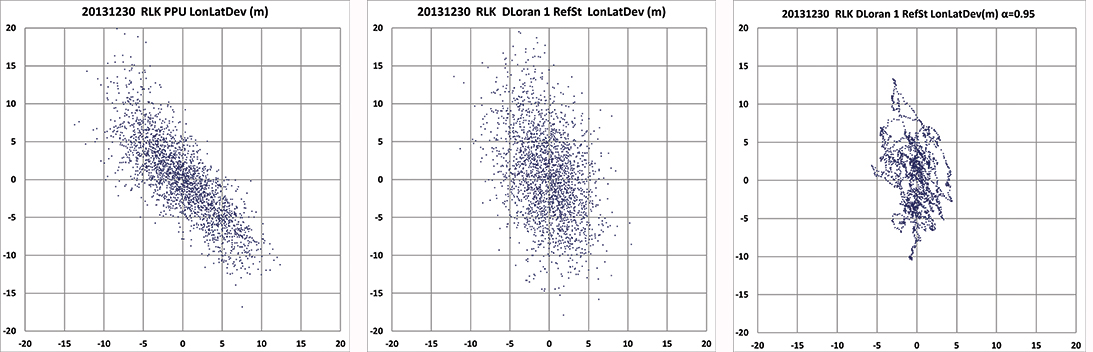
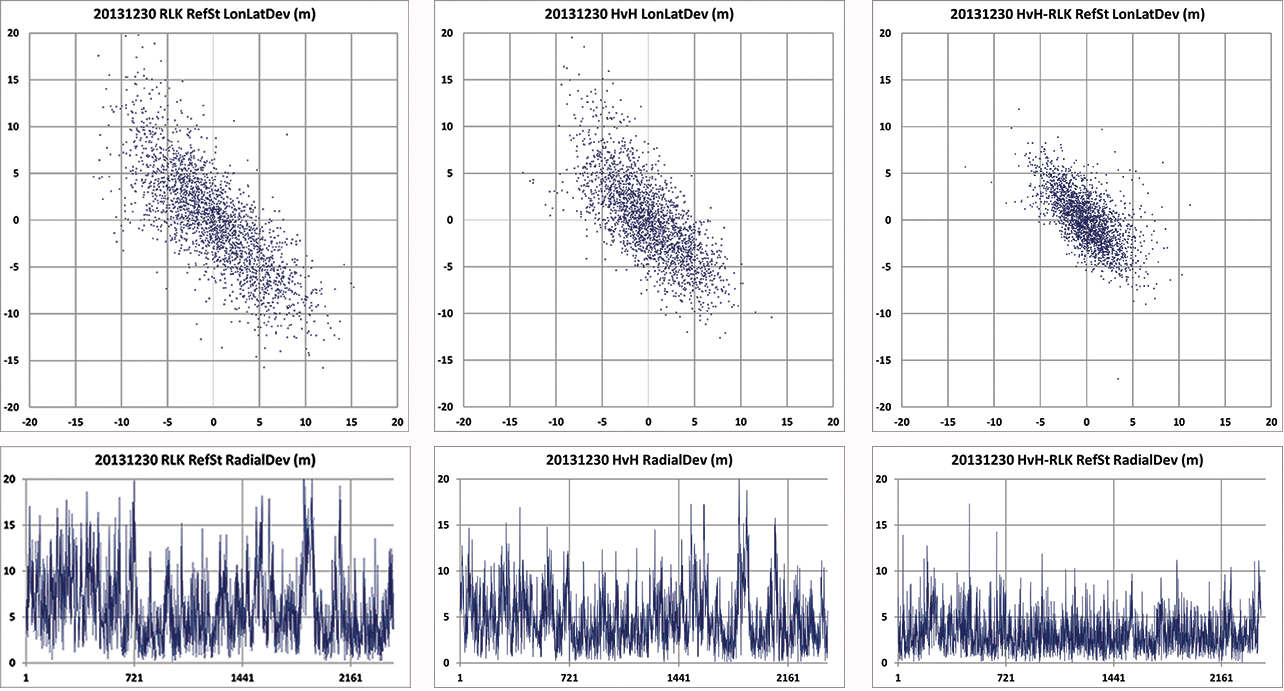
In the UK, many tests have been conducted to measure these ASF shifts and use the Eurofix data link for sending correction data to the user receiver. DLoran data are sent as pseudorange corrections per station. A complete set of DLoran correction data takes about 90 seconds. The UK plans to send correction data from multiple reference stations via a single Eurofix channel. The resulting very large data latency will preclude accuracies any better than 10 meters. The main reason of this conclusion was found by further analysis of measurements of the position of the rover receiver. These positions are shown as a scatter plot in Figure 4.
Figure 4. On the left the position deviation scatter plot at the rover receiver. The middle plot is the result after applying DLoran corrections from a reference station. The right plot of the same DLoran plot after being low-pass filtered indicating the slow moving of the phase center of the Anthorn transmitter. The axes are in meters.
The left-hand plot gives the position deviation of 2,500 independent measurements, where the scattering was thought to be caused by noise on the measurements. The middle plot is the result after being corrected by DLoran data with a 90-second data latency, which shows a somewhat modified form but still quite noisy plot. However, when the DLoran data were low-pass filtered, it appeared that often all separate measurements more or less formed lines, which would not happen with just atmospheric noise. Further, the scattering after filtering did not decrease much, which would happen if the disturbances were due to noise. See the right-hand plot in Figure 4.
This demonstrates that the source of the problem is the slow data rate through the Eurofix channel, in combination with the movements of the phase center of the transmitter antenna at Anthorn. Apparently, the solution had to be found in a much faster data link which could neither be offered by Eurofix (30 bps) nor by the U.S.-proposed OFDM technique with a data rate of approximately 1 kb/s. This unexpected result forced us to drastically change the concept of differential Loran to get much better accuracy results, as requested by the Rotterdam pilots.
Enhanced Differential Loran
The above mentioned difficulties with DLoran have led to a new concept of differential Loran which had to fulfil three important primary improvements. The first is a significant reduction in the latency of the data in the data channel; the second is that a large number of reference stations should be allowed to send correction data to the user without saturating the data channel. Finally, it is necessary to measure ASF data more accurately without being dependent on atomic clocks.
The simple conclusion was that Eurofix could not meet the first two improvements. As Eurofix is an invention of Delft University in the Netherlands, it was somewhat painful for the Dutch to admit that a much faster data link is absolutely needed to achieve a two-fold better differential Loran position accuracy. However, Eurofix is still the prime GNSS backup candidate for distributing accurate UTC over very large parts of Europe. Further, Eurofix has the capability to send short messages, which might be encrypted for secure communication purposes that might then form a terrestrial backup for Galileo PRS.
Finally, the third improvement to generate more accurate ASF data cannot be found on a pseudorange method but has to be established on position bases.
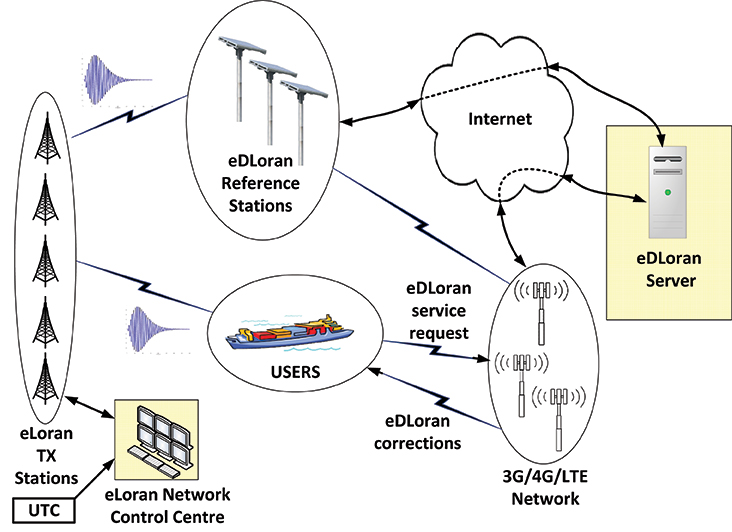
Instead of using the Eurofix channel, eDLoran uses the public Global System for Mobile (GSM) network to send the differential corrections to users. eDLoran receivers therefore contain a simple modem for connection to the GSM network. The eDLoran reference stations are also connected to the Internet, which may be implemented via a cabled access or also via a GSM modem.
Fortunately, today many GSM networks are robust in respect of GPS outages. The eDLoran concept is quite simple and is shown in Figure 5.
Figure 5. Concept of eDLoran. By courtesy of Babcock International Group.
The eDLoran infrastructure is not connected with any Loran transmitter station and operates completely autonomously. An eDLoran reference station is connected to a central eDLoran server by its connection to the Internet.
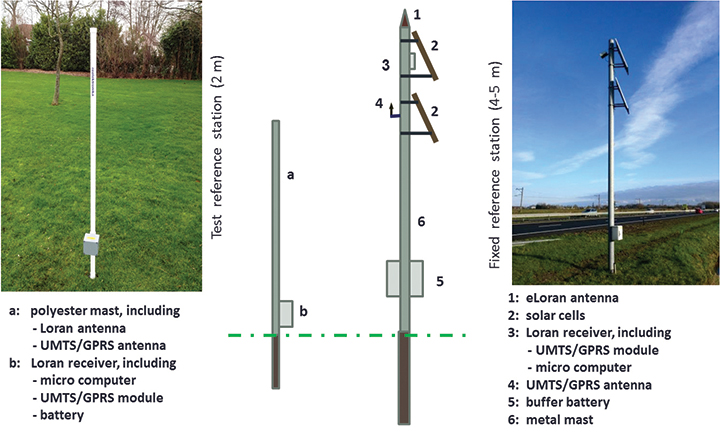
The measured positions of these reference receivers are processed in the eDLoran server, which returns the resulting correction data to the user, also via the Internet. Data latency will be not more than 2 seconds. The rover receiver starts the entire process by sending the raw position to the server, which will then return the optimal ASF database for that particular area. Corrections can be calculated by using data from multiple reference stations. Reference stations for eDLoran are small and consume not more than 10 Watts. Two types of reference stations are under development. A portable simple battery-powered version, not larger than 2 meters, can operate for 8 hours. This version is meant to do interference analysis on selected candidate locations. For a permanent installation, a continuously operating solar-powered unit is also under development. See Figure 6.
Figure 6. Concepts of a mini reference station (left) and a permanent eDLoran reference station.
It has been mentioned that measuring accurately the departure and arrival times of Loran pulses is difficult. It is however needed in order to work out the ASF data on the pseudorange measurement for each Loran station in view. Therefore, a DLoran ASF measurement receiver concept uses Rb clocks and is relatively large and power-hungry. With eDLoran, position offsets due to ASF effects are measured and an eDLoran reference server outputs position- instead of pseudorange-corrections. Measuring positions is much simpler and more accurate and can be done with standard miniature low-power eLoran receivers. No GPS-disciplined Rb clock is needed, and total costs are significantly lower. The gain in accuracy of this simpler ASF measurement receiver together with the very low data latency is one of the reasons that the resulting eDLoran position accuracy is now approximately 5 meters instead of 10 meters with DLoran.
eDLoran Results
We conducted real-life static and dynamic tests to demonstrate the capabilities of this new concept. The static tests were done in post-processing with logged data from Hook of Holland and at Reelektronika, about 40 kilometers to the east. Only standard eLoran receivers, mostly equipped with E-field antennae, were used, and no atomic clocks were applied. At Reelektronika ,we used two 2-meter mini-reference stations, while in Hook of Holland the Loran antenna was mounted on top of the 30-meter lighthouse. Dynamic tests were done on board of the MS Polaris, the new pilot-station vessel of the Dutch Pilots’ Corporation.
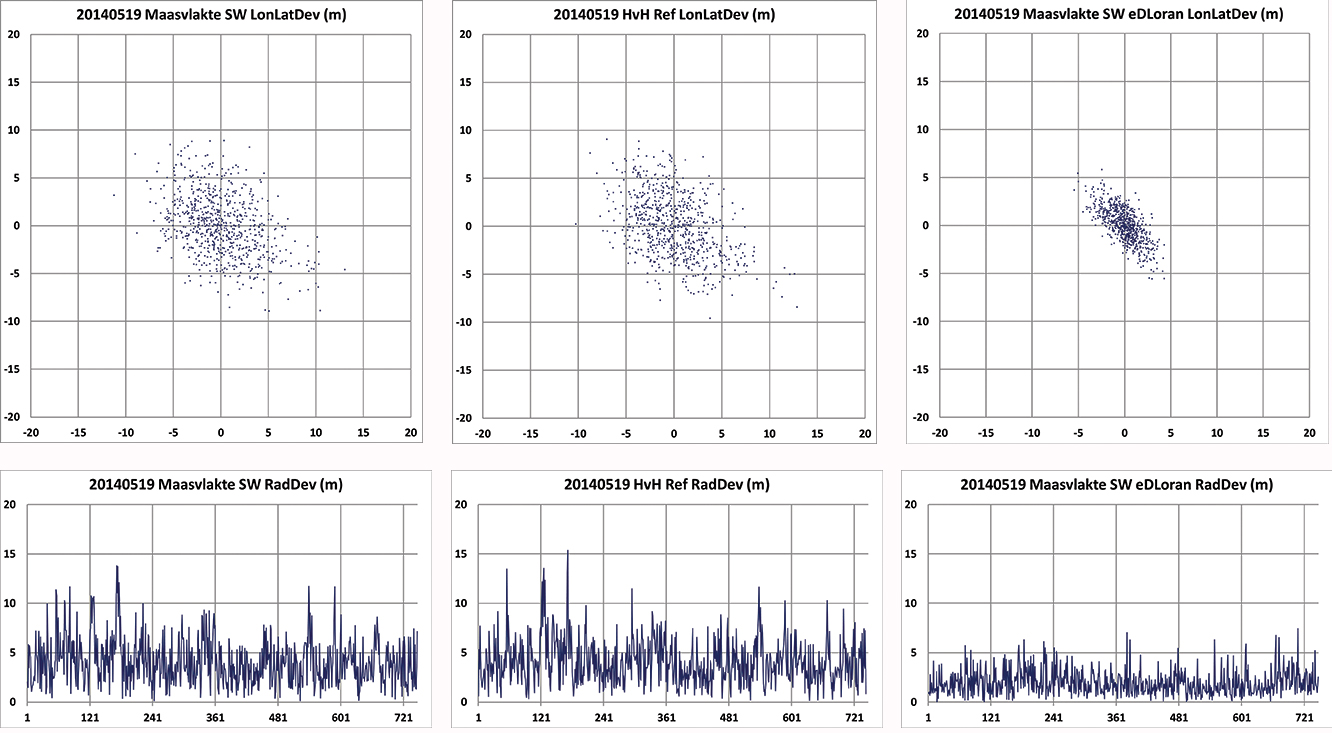
Static Tests. To give a realistic image of the resulting errors of eDLoran, the scatter plots in Figures 7 and 8 are depicted in the position domain. The radial errors are shown in the time domain where the horizontal axis gives the 5-second epochs. The left and the middle plot show the results of the rover and the reference receiver, respectively. The eDLoran plots on the right depict interesting results, as those variations in ASF are largely cancelled while the scattering is smaller than that of the measurements at the rover and the reference receiver, individually. The scattering at the two locations was apparently partly due to low-frequency disturbances, for example because of the moving phase center of the antenna at Anthorn, or instabilities in the time-control loops in the transmitters.
Figure 7. Position scatter plots in the upper row and radial error plots in the lower row of the user receiver on the Maasvlakte and the reference receiver at Hook of Holland. The right-hand column depicts the results for eDLoran. The two sites are separated by about 11 km. The horizontal axis shows the 5-second epochs.Figure 8. Position scatter plots in the upper row and radial error plots in the lower row of the receivers at Reelektronika and Hook of Holland. The right-hand column depicts the results for eDLoran. The two sites are separated by about 40 km. Some eDLoran accuracy degradation around events 250 and 500 may be due to local interference at Reelektronika.
Figure 7 shows the situation where the rover and the reference receiver were separated by 11 kilometers, while Figure 8 depicts the results when the rover receiver was at Reelektronika, more than 40 kilometers from the reference site at Hook of Holland.
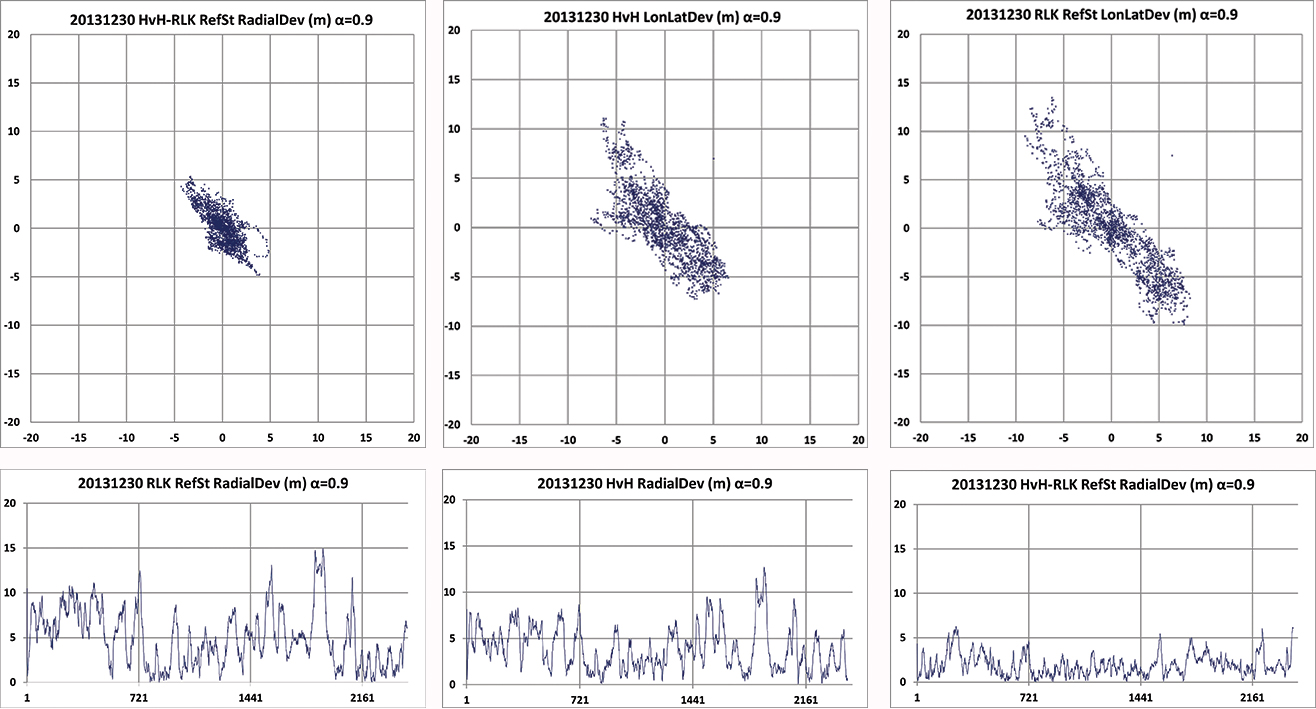
This effect of movement of the phase center of the transmitter antenna is further made visible by applying an alpha-tracker (α = 0.9) on the position data of both receivers, which have an update rate of 5 seconds. The lining-up of dots on some parts of the scatter plots in Figure 9 are believed to be due to swaying of the transmitter antenna. Due to the low-pass filtering, the disturbances now contain fewer high-frequency terms.
Investigating the radial error plots of Figure 9, it is remarkable that the large excursions at event 1880 largely cancelled. The disturbance at event 1880 might be caused by antenna movement at Anthorn, which is nearly perfectly cancelled by eDLoran.
Figure 9. Above plots are based on the same data as in Figure 8 but now after passing through an alpha tracker with α = 0.9. Note the correlation of the radial deviations around events 1800 in both 40 km separated receivers and the strong reduction in scattering.
Investigating the radial error plots of Figure 8 and 9, it is remarkable that the large excursions around epoch 1900 largely cancel, while this is not happening at epoch 250. There, some local interference might have been the cause. The disturbance at event 1900 might be caused by swaying of the Anthorn antenna which is then a common-mode error at both receivers and is therefore strongly reduced in the eDLoran plots.
Dynamic Tests. Dynamic testing on board the Polaris at sea (Figure 10) is somewhat more complex to do correctly. The eDLoran receiver was installed about 1 meter above the GPS-RTK reference receiver. In this way, the lever-arm problem of not installing the antennae of the two receivers at the same location was avoided. The next issue was measuring ASF position data, which should happen synchronously with the GPS measurements. Time synchronization can be achieved by using simple GPS receivers at both Loran receivers. Some months later, the eDLoran concept was tested by using the stored AFS data and using a Reelektronika eDLoran receiver as a portable pilot unit (PPU) which looks identical to the GPS-based units the Rotterdam pilots use, manufactured by AD Navigation in Norway.
Figure 10. Top right, the Pilot Station Vessel MS Polaris (80 meters) used to test eDLoran (photo copyright Loodswezen). Below is a complete eDLoran receiver with a ‘life-line’ connected to avoid losing the receiver by accident and to allow charging the internal batteries.Figure 11. Five test antennae on the MS Polaris. From left to right the ADNav Master Processing Unit, the ADNav Heading Unit, the ADNav Position Unit with the Reelektronika eDLoran receiver 1 meter above it and, finally, a second Reelektronika eDLoran receiver.
The results have been demonstrated to the harbor authorities in real-time on the laptop of the pilots on which the GPS-RTK and the eDLoran position were simultaneously shown. See Figure 12, where the large gray ship model represents the position and heading derived from GPS-RTK. The width of the ship model is 10 meters. The red triangle gives the eDLoran position; it remains within the borders of the ship symbol. For further demonstration purposes, the logged GPS-RTK data could also be plotted on a Google Earth map (Figure 13). The track was widened to 10 meters, as the accuracy requirements are 5 meters on either side of the track. The raw eLoran track is also shown, as well as the final white eDLoran track of unfiltered raw eDLoran data, which stays well within the 5-meter boundaries.
Figure 12. The large ship symbol (grey) is derived from the GPS-RTK receiver of the Rotterdam pilots. The width of the ship symbol is 10 meters and the speed-over-ground was 11 kts. The red triangle is generated by the eDLoran receiver and remains between the required ± 5 meter limits for eDLoran.Figure 13. The red track is based on raw eLoran data without any corrections. The transparent blue line is made by GPS-RTK and is widened to 10 meters giving the required ± 5 meter limits of eDLoran. The white line is output from the eDLoran receiver which stays within the borders of the 10 meter wide transparent blue line.
During the sea trials, the eDLoran receiver was connected to the eDLoran server on land via a miniature GSM modem to the Internet. All differential data were read via this mobile link. The required data bandwidth is very low, approximately 150 bps per ship (client).
Conclusions
The outcome of this research opens some new and quite surprising possibilities for multiple applications:
eDLoran offers the best possible eLoran accuracy, as it does not suffer from unstable transmitter antennas, sub-optimal timing control of the transmitter station, and differential data latency.
There is no need to replace older Loran-C stations with eLoran transmitters; this potentially would save large amounts of money. Further savings may be obtained by containerizing the transmitter and operating the stations unmanned.
Installing eDLoran reference stations is fast, simple, and very cost-effective.
The Eurofix Loran Data Channel can be freed from a relatively large stream of DLoran data, which leaves the full data bandwidth available for UTC and short-message services over very large areas.
As there is no data channel bandwidth limitation, multiple reference stations can be installed, offering increased reliability and making the system more robust to terrorism and lightning damage.
Single or multiple eDLoran servers can be installed in a protected area. There is hardly a practical limit to the number of differential reference stations to serve.
The server selects the most optimal differential data based on the raw position of the user (client) and the available reference stations.
As there is no need for any Loran data channel, eDLoran can be installed in all locations where Loran or Chayka coverage and access to the Internet are available. Required data bandwidth is approximately 150 bps per user.
Standard eLoran receivers used on controlled trajectories (for example, pilots and ferries) collect position data when accurate DGNSS is available. The collected GNSS and eLoran data can be uploaded to the server to further refine the ASF data base. It is basically a self-learning system.
All eDLoran reference stations monitor the eLoran and GNSS positions to offer alarm services in case of GNSS jamming or spoofing.
Acknowledgments We are very grateful for the near-endless hospitality of the Rotterdam Pilots and especially the crew of the MS Polaris and the MS Markab. Without their help, we would not have obtained the eDLoran results presented here. During the days at sea, we learned how much experience and professionalism is needed to bring those extremely large vessels safely in the harbor of Rotterdam.
We thank Martin Rumens and Dave Kelleher of Babcock International Group for their valued comments and diagrams.
DURK VAN WILLIGEN is a retired professor of electronic systems for navigation at the Delft University of Technology. He is founder and president of Reelektronika B.V., and started the development of Eurofix in 1985. He received the Thurlow Navigation Award of the Institute of Navigation (U.S.) and the Gold Medal of the Royal Institute of Navigation (UK).
RENÉ KELLENBACH graduated from Delft University of Technology in electrical engineering. After joining Reelektronika as a systems engineer, he has been involved in designing hardware and software for radionavigation and radar systems.
CEES DEKKER graduated from the Delft University of Technology in electrical engineering. He worked previously at Philips Research Labs and now assists Reelektronika B.V. with the development of Loran systems and GPS-related projects, and information systems.
WIM VAN BUUREN is a licensed maritime pilot in Rotterdam who took the initiative to develop a backup positioning system for the approaches to Rotterdam. He has been involved in the design and development of the hardware and software of Portable Pilot Units on a national and European level since 2000.
A sixth GPS IIF satellite was launched aboard a United Launch Alliance Delta 4 rocket from Cape Canaveral at 8:08 p.m. EDT May 16.
The satellite, designated GPS IIF-6 and built by Boeing, is one of the next-generation GPS satellites, incorporating improvements to provide greater accuracy, increased signals, and enhanced performance for users.
According to Boeing, each GPS IIF satellite has greater navigational accuracy through improvements in atomic clock technology and a new civilian L5 signal to aid commercial aviation and search and rescue operations.
Interestingly, the rocket is the first to be tracked via GPS instead of by radar.
United Launch Alliance’s Atlas and Delta rockets are transitioning to GPS metric tracking for range safety functions, which protect the public and property should a launch vehicle veer off course. The move is a money-saving upgrade to the military’s aging range infrastructure.
A special avionics system on the launcher transmitted the location. For decades, most rockets launching from Cape Canaveral, Florida, and Vandenberg Air Force Base, California, have been tracked by C-band radar.
Two more GPS IIF satellites are scheduled to launch before the end of the year.
Galileo FOC Satellites Reach Spaceport
Galileo’s first two full operational capability (FOC) satellites arrived in Kourou, French Guiana, on May 7, in preparation for launch this summer.
Manufactured by OHB in Bremen, Germany, with navigation payloads contributed by Surrey Satellite Technology Ltd. in Guildford, UK, these satellites — the first of 22 full-capability models — had spent several months at ESA’s Technical Centre, ESTEC, in Noordwijk, the Netherlands, where they underwent exhaustive testing in simulated space conditions.
The Galileo satellites are named for the children who won a painting competition organized by the European Commission in 2011. Doresa and Milena, the first two FOC satellites, will be launched together aboard a Soyuz rocket, joining the four Galileos already in orbit. Adam, the third Galileo FOC satellite, is now undergoing testing under space conditions at ESTEC. Anastacia, the fourth Galileo FOC satellite, will begin final testing at OHB in Bremen before being shipped to ESTEC.
“A steady stream of satellites is foreseen, coming from OHB to ESTEC for acceptance testing and then on to French Guiana,” said an ESA official.
Arianespace is already facing an exceptionally crowded launch manifest in 2014. A well-informed source opined, “If one were to hazard a guess, here is the most likely scenario: O3b arrives ready for launch several weeks ahead of Galileo and secures the June launch. Galileo moves to August and is promised a second launch in the autumn. O3b’s planned second launch in 2014 is moved to early 2015, as is the planned third launch of Galileo.
“The effect of these schedule slips on the cost of the Galileo program, which is about a year late — cost overruns that Tajani has vowed will not be paid by the commission — is a subject for another day.”
New Loran at 5 Meters
The red track is based on raw eLoran data without any corrections. The transparent blue line is made by GPS-RTK and is widened to 10 meters, giving the required ± 5-meter limits of eDLoran. The white line is output from the eDLoran receiver, which stays within the borders of the 10-meter-wide transparent blue line.
Dutch consultants Reelektronika showed results from a prototype enhanced differential Loran (eDLoran) system, extensively tested in the Europort (Rotterdam) area, at the European Navigation Conference held in April. The tests achieved accuracies of 5 meters. A full technical article describing the equipment, methodology, and test results will appear in the July issue of GPS World.
Harbor pilots require accuracies of 5 meters and some form of robustness or back-up for GNSS systems in case of jamming, unintentional interference, system failure, or other disruption.
The current eLoran system cannot get better than 10-meter accuracy. The new eDLoran opens up new possibilities for multiple applications:
Installing eDLoran reference stations is fast, simple, and cost effective.
As there is no data channel bandwidth limitation, multiple reference stations can be installed, which offers increased reliability and makes the system more robust against terrorism and lightning damage.
A single or multiple eDLoran servers can be installed in a protected area. There is hardly a practical limit in the number of differential reference stations to serve.
CNAV on L2C and L5 Initiated
On April 28, U.S. Air Force Space Command began broadcasting civil navigation (CNAV) messages on all operational GPS satellites capable of transmitting the L2C and L5 signals. L2C is designed for commercial needs and L5 meets safety-of-life transportation requirements.
“These new CNAV messages will enable manufacturers to develop and test advanced civil receivers and make for a more robust position, navigation, and timing (PNT) solution available to the civilian public,” said Maj. Gen. Robert E. Wheeler. “We do not anticipate any GPS satellite outages or legacy degradations as a result of the pre-operational deployment of these frequencies, and those currently using the GPS Standard Positioning Service should not be impacted.”
Initial CNAV broadcast occurs at a reduced data accuracy and update frequency compared to GPS signals in use today. In December 2014, CNAV data updates will increase to a daily rate, bringing L2C and L5 signal-in-space accuracy on par with legacy signals. However, derived position accuracy cannot be guaranteed during the pre-operational deployment. These signals are primarily used to test various equipment and should be employed at the users’ own risk; not used for safety-of-life or other critical purposes.
The Air Force will broadcast L2C messages with the health bit set “healthy,” as was the case during a June 2013 test. L5 messages will be set “unhealthy,” but as experience grows with L5 broadcast and implementation of signal monitoring is achieved, this status may change upon review.
At the ENC-GNSS Conference in Rotterdam, we delved into actions necessary to officially use EGNOS (giving me déjà vu from WAAS’s early days), heard sage words from Brad Parkinson, the father of GPS, and, on the last day, saw amazing proof of a claim many of us initially thought was outrageous — that differential (DLoran) with modern monitoring can result in consistent horizontal accuracies approaching five meters on a moving platform.
When I was asked if I could cover the European Navigation Conference 2014 (ENC-GNSS) in Rotterdam, The Netherlands, it took me about two seconds to answer in the affirmative. Let’s see… Travel to Europe in the spring, visit The Netherlands — my old stomping grounds where my daughter was born — see miles and miles of beautiful Tulips in bloom, and visit with some old friends. Gee, what a tough decision. Oh, and of course, cover the ENC. Almost forgot that
Seriously, my primary purpose, of course, was to cover the ENC and associated events such as the Resilient PNT Forum and a meeting of the European Maritime Radionavigation Forum (EMRF), but literally miles and miles of brilliant red, white, and yellow tulips interspersed with ancient windmills are hard to ignore. But I digress.
In past years the ENC, with approximately 400 attendees, has been naturally dedicated to European PNT matters, and in reality it concentrated almost exclusively on Galileo with a slight mention of EGNOS. That was about it. This year, the venue was the same, but the program was more open, with presentations on PNT augmentations such as EGNOS and DLoran, and maritime navigation to include radar and inertial systems.
For those of us that have been in the PNT (positioning, navigation and timing) or merely the navigation business, say, for the past 40+ years or so, in some respects it was more than slightly reminiscent of times past. As the great American octogenarian baseball philosopher and malapropism aficionado extraordinaire, Yogi Berra, once said, “It was déjà vu all over again.”
European Maritime Radionavigation Forum
The Port of Rotterdam today (2014).
The EMRF was the first official function to kick off in Rotterdam. When you consider that Rotterdam is one of the busiest ports in Europe and had been around since 1340, you would naturally expect one of the main conversations at the EMRF to concern the port of Rotterdam and navigating in less-than-perfect conditions. The Netherlands is known as the Low Country, and that is as an apt description since most of the country is below sea level — hence the persistent fog, dikes, sea walls, and windmills that pump water and grind grain and all those good things. Today, the modern versions of those windmills are huge — twenty stories tall — and generate electricity. Many of them are close to shore so precise navigation in foggy conditions is even more critical than in times past.
The main topic of conversation at the EMRF revolved around the actions necessary to officially use EGNOS (the European Geostationary Navigation Overlay Service) as a precision and official safety-of-life augmentation for GPS (similar to WAAS, Wide Area Augmentation System) and Galileo.
During those discussions, I swear when I closed my eyes, except for the accented English, I was propelled backward almost 20 years to discussions of WAAS as a safety-of-life system, not for maritime but for aviation purposes. Still, the dialogue and heated discussions echoed down through the years almost verbatim. The main difference, of course, being that in the U.S. it was 20 years earlier, we were embarking on virgin territory, and we had only ourselves, one nation, to debate. Whereas the Europeans are fighting the same battles two decades later, with a system that is purposefully almost an identical copy of WAAS technically, and they are working for maritime and aviation certifications simultaneously. And not with just one nation but the entire European Union. A truly daunting task.
The EMRF website is sponsored by Trinity House in London, which is responsible for the safety of [English and European] shipping and the well being of seafarers, which have been their prime concerns ever since Trinity House was granted a Royal Charter by Henry VIII in 1514. I planned to list the EMRF website for your further edification, but since the latest news on the site concerns the upcoming January 2011 EMRF meeting in Paris, I thought it was best left to molder in obscurity. The website, not the EMRF.
The bottom line for the EMRF is that while it fills an important role where EGNOS and maritime navigation are concerned, it still has a lot to learn and could benefit greatly by lessons learned from WAAS. However, I personally see no indication that will happen, so we wish them luck. Many of us are standing by to assist if asked. Even if it is only, “Been there, tried that, and here is why it did or did not work.” Quod homo non sit Island.
Resilient PNT Forum
I was happy to see Dana Goward (USCG Ret), the head honcho at the Resilient Navigation and Timing Foundation, which conducted the Resilient PNT Forum at ENC 2014. Dana’s forum, which took place just before the official ENC 2014 kickoff, concentrated on the need for and strategies to achieve resilient position, navigation and timing (PNT) services. The event was well attended, and was jointly hosted by the European Group of Institutes of Navigation, the International Association of Institutes of Navigation, and the International Association of Marine Aids to Navigation and Lighthouse Authorities. There was no charge to attend the event, and the collaboration proved interesting, especially since Dana really wanted to talk eLORAN and GPS/Galileo augmentations.
Dana is retired U.S. Coast Guard and worked many years supporting LORAN-C and the USCG Navigation Center. Dana showed a brief video of his recent testimony before the U.S. Congress, where he lobbied for a cessation of the destruction of LORAN-C towers and their associated infrastructure. If recent congressional actions are any indication, he has been somewhat successful in that regard. Now all that is left is to help the U.S. Congress, services, and agencies realize how badly the United States needs LORAN as a backup, enhancement, and augmentation to GPS and other space-based PNT services on a global basis. No small task, but it is a task that Dana Goward and the Resilient Navigation and Timing Foundation have strapped on, and we wish them the best. Plus, as you will see later, a surprise presentation at ENC-GNSS may have given Dana and his cause just the boost they need. Keep reading.
As it turns out, many others thought these non-Galileo presentations were timely topics as well, and the discussions were enlightening, especially the Resilient PNT Forum keynote address by Professor David Last. Among many other titles he holds, Last is a consultant engineer and expert witness specializing in radio navigation and communications systems. He is a professor emeritus at the University of Bangor, Wales, and past president of the Royal Institute of Navigation. He acts as a consultant on radio-navigation and communications to companies and to governmental and international organizations and is active as an expert witness, especially in forensic matters concerning GPS.David and I are old friends, and it is always enlightening and entertaining to hear him speak. On this occasion, Professor Last spoke eloquently and authoritatively concerning the ubiquity of GPS/PNT and the resultant and inherent vulnerabilities of space-based systems. David made the essential point that while GPS remains the sine qua non of PNT, it is still vulnerable and subject to failures as are all space-based PNT systems, the recent GLONASS debacles being prime examples. More on these unfortunate Russian examples of PNT vulnerability at a later date.
David pressed the issue, as he has many times, that we desperately need a ground system or many different ground-based augmentations, backups, and enhancements to ensure that the user is never without navigation and timing data at a critical juncture, such as navigating through an insanely busy commercial port in thick fog.
This theme was carried forward in the ENC-GNSS very adroitly by none other than Dr. Bradford Parkinson, the Father of GPS. Dr. Parkinson spoke at length on the need to “Protect, Toughen, and Augment GNSS” against all enemies, be they manmade or natural. Brad made the point, with all due credit to Will Rogers, that “Rumors of GPS’ death are greatly exaggerated.” Indeed, the GPS constellation has never had more satellites on orbit, in residual status, and spares in the barn than we do today. The SIS or Signal In Space has never been more accurate, and the GPS atomic reference systems have never been more stable than today, and yet GPS remains incredibly vulnerable. But take heart, as Dr. Parkinson is convinced “There are actions such as PTA that can be taken to safeguard PNT for all users.” We will cover Dr. Parkinson’s 60+-slide presentation in depth at a later date.
Surprise! Loran Is the Answer
The big surprise came on the last official day of the conference during a group of alternate PNT presentations co-chaired by Dr. David Last. The rather startling enhanced differention LORAN (eDLoran) presentation was given by Professor Durk van Willigen, representing his colleagues René Kellenbach and Cees Dekker of the Dutch consulting firm Reelektronika, and Wim van Buuren of the Dutch Pilots’ [ed. maritime] Corporation, who helped with the DLoran research and authoring of the paper for the ENC presentation.
Professor van Willigen made what many of us initially thought was an outrageous claim, and then amazingly went on to prove that enhanced differential Loran with modern monitoring produced consistent horizontal accuracies approaching five meters on a moving platform. Needless to say, Professor van Willigen, who teaches at the Delft University of Technology in The Netherlands, was mobbed at the end of his presentation, but I did manage to catch him for a few minutes afterwards. Since then, GPS World Editor-in-Chief Alan Cameron has spoken with Professor van Willigen at length, and the result is the first of what I am sure will prove to be numerous articles on eDLoran in GPS World.
Shipboard DLoran receiver installation (orange boxes on rails).
One would hope that with this rather startling improvement in differential Loran accuracy and the decision by the U.S. Congress to halt the destruction of Loran-C infrastructure in North America, that there might once again be a future for Loran, especially eLoran and/or DLoran in North America, and hopefully globally as well.
As Professor David Last in his best imitation of John Cleese might say, “It is the answer to a maiden.s prayer.”
Until next time, happy navigating. I hope to see you all at the 30th Space Symposium May 19-22 in Colorado Springs at the Broadmoor Resort. More than 10,000 attendees are expected, and I hope you will be one of them. Stop by the GPS World booth and say hello.
In the wake of last month’s Expert Advice column on eLoran — “The Low Cost of Protecting America” by Dana Goward of the Resilient Navigation and Timing Foundation — come several positive comments and encouraging developments. Rather than rehearse all the arguments why we should care about this, I’ll repeat the one word that I heard most often in GNSS circles in 2013: jamming. Followed closely by: spoofing.
“I have been advocating strongly for reconsideration of the government’s domestic Loran decision for the last year or so,” writes one reader positioned on Washington’s Beltway, “and specifically working within the Department of Defense (DoD) to ensure it is aware of international developments for eLoran in the UK and South Korea, and the possibilities inherent in other former Loran chains.
“The DoD is beginning to recognize the value of eLoran as a complement to GPS, not only for international missions, but in cooperation with the departments of Transportation and Homeland Security for domestic critical infrastructure.”
Last fall, Don Jewell’s Defense PNT newsletter on the same subject drew this reply from another well-known expert:
“One of the key short-term actions is to prevent the decommissioned [Loran] sites from being sold off for subdivisions. These sites are a national treasure with unique properties: soil conductivity, water content, metal content, and more that are hugely important in siting low-frequency positioning systems. Those long-gone engineers of the 1940s and ’50s knew this and chose accordingly.”
Before last month’s issue appeared but after it had gone to press, President Obama signed the National Defense Authorization Act (NDAA) for 2014. It contained several favorable New Year’s auguries for positioners, navigators, and timers.The act evinced an acute awareness of the vulnerability of space systems to disruption. The act is also a law governing the land. Through it Congress requires the administration to, among other things, explain biennially in its “Space Protection Strategy” report exactly how, in the event space systems are disrupted, DOD and the intelligence community “plan to provide necessary national security capabilities through alternative space, airborne, or ground systems.”
Since said administration acted early in its first term to decommission Loran-C, the congressional directive is pointed.
The next big thing coming up on the GNSS international horizon takes place in Rotterdam, the Netherlands, April 15–17: the European Navigation Conference, ENC-GNSS 2014. It includes a track session on “eLoran and other Low-Frequency Systems,” and I’ll be there with pencil sharpened.
Brad Parkinson will give the ENC keynote, and he is on record as one of an august group of Institute for Defense Analyses experts who unanimously recommended that the existing Loran-C be greatly updated and modernized to eLoran. We should hear more from him on this subject amid the wharves, waterways, and docks of Europe’s largest port (world’s third busiest).
There’s barely room left to report the successful tests of Enhanced Differential Loran (eDLoran) by Dutch specialists Reelektronika: absolute accuracy of 5 meters in the North Sea and in the Rotterdam Europort harbor area.