A: The availability and quality of GPS in the application is critical. Industrial-grade MEMS IMUs can provide survey-grade performance when high-quality GPS is continuously available, but even tactical-grade MEMS cannot provide more than a couple of minutes of GPS-denied navigation. The level of integration between the two technologies is also important. Even comparing two systems using the same sensors, the performance is highly dependent on the ability of the system designer to leverage their respective strengths.
A: Successful integration of inertial sensors with GNSS requires understanding both the goals and environment of the application. Consider the required accuracy of attitude and position, severity of GNSS obstructions, expected dynamics and environmental conditions. Tradeoffs in size, power and cost narrow the choices, but achieving the desired performance is more nuanced. Data sheets for IMUs can also be notoriously difficult to compare. My advice is to focus on the goals and listen to the experts.
A: There is a clear need for reliable consumer-grade GNSS/INS in GNSS-degraded environments. In this case, two key aspects are: removal of measurement outliers, mostly caused by multipath; and adequate modeling of inertial errors. The first aspect is efficiently addressed via residual monitoring, especially with GNSS carrier phase. A 15-state INS error model is generally sufficient. Yet, modeling parameters and contribution of other terms such as axis misalignment must be evaluated using test data.
A: Anti-spoofing is a receiver function. It is the ability of a GNSS receiver to distinguish between actual navigation signals and false signals. Simulators allow a receiver developer to play “what if” games with their receiver. A simulator user controls every variable that a receiver processes. Time, satellite information and almanac are all specifiable.
A: With a simulator, a user may include spoofing signals in a variety of test scenarios. The results from the receiver under test may then be compared to the “truth” data available from the simulator, in order to demonstrate any susceptibility to spoofing. As anti-spoofing measures or product features are developed and applied, the same tests may be repeated, in order to evaluate the effectiveness of the countermeasures.
A: Since live-air spoofing is illegal, simulators provide a fully controlled and repeatable environment for evaluating spoofing resilience of algorithms and products. Newly available low-cost simulators may also reduce the overall cost and time, and increase the confidence level as well as reduce the environmental impact compared to having to go to a military test-range for live testing. Simulators also provide the ability to test spoofing scenarios that may not yet be possible with today’s technology, such as multi-GNSS spoofing.
A: Simulation is of great benefit when developing product features due to its repeatability. By replaying a consistent scenario, new products can have GNSS capabilities edge-tested for criteria such as receiver sensitivity, programming robustness and latency. Additionally, by replaying two scenarios created with signal-generator software on a multi-constellation simulator, starting at the same position and time and using the same constellation(s) but with one that diverges in position, spoofing vulnerabilities can be assessed.
A: One of the most effective methods for mitigating GNSS spoofing is spatial discrimination. This supposes two or more receiving antennas are used. To test such systems and help designers to tune their algorithms in a controlled environment, the spoofing and truth GNSS signals must be simulated by a wavefront approach. This ensures that the signals’ code and carrier-phase offsets at the antennas’ phase center will be a function of the relative receiver/transmitter geometry.
A: A flexible, high-quality RF constellation simulator provides the capability to model a multitude of scenarios in realistic environments. Users can configure signals and data to perform spoofing attacks, echoing both those observed and those purely theoretical today. Performing these tests via RF simulation provides highly controlled, repeatable system tests while providing flexibility to evaluate performance thresholds. The ability to assess risk and evaluate system robustness using simulation is vital in the evolving GNSS threat environment.
A: A spoofer is a simulator that has been modified to be a slave of a master system, which defines the signal and trajectory to be emitted. To test an anti-spoofing system, it is necessary to have two simulators: the first will emit the real GPS constellation and the second will emit the spoofing signal, which will be probably synchronized in time and position at the beginning, but with divergent evolution in time.
A: Simulation is currently the best method to develop and test anti-spoofing algorithms. To ensure realism, it is often necessary to simulate both the true and spoofed signals from separate simulators. This provides flexibility for the threat to be modeled differently than the real satellites, a critical nuance that is often overlooked. Without the repeatability and control that such simulation provides, it would be impossible to adequately test the anti-spoofing capabilities of a GNSS receiver.
Q: What are the key criteria in selecting a GNSS antenna for a particular application?
Jerry Freestone, Chief Engineer, Antennas and Anti-Jam, NovAtel
A: Performance, size and cost. Size and cost are easy for the integrator to assess; determining the necessary antenna performance to achieve the desired system-level performance is difficult to evaluate. Obtaining the complete GNSS solution from a single source is ideal; vendors that sell both antennas and receivers will generally understand the minimum system-level performance their solutions can provide for a given application and deliver the optimized solution to meet all three criteria.
Brandon Oakes, Director, North American Sales and Marketing, OriginGPS
A: Antenna selection for GNSS applications must consider performance, size and cost. Successful GNSS deployments start with the antenna selection in mind rather than waiting until the end and letting other design constraints drive the antenna selection. Patch antennas are always our preferred solution due to polarization, robustness and our patented integration method that minimizes bandwidth shift. Chip antennas are attractive due to their size, but consideration must be paid to ground-plane size and detuning.
Q: What is the biggest challenge facing designers of multi-constellation GNSS receivers today?
Javad Ashjaee, founder of Javad GNSS: The biggest challenge now is spoofing.
Some years ago the issue was jamming —the hot issue of LightSquared — that would hurt GNSS. To solve that problem we created the J-Shield and showed that J-Shield technology could protect against LightSquared and similar signals. We manufactured dozens of units that were successfully tested by several independent laboratories.
Now GNSS faces the spoofing issue. Reports of Black Sea spoofing and other examples show the urgency of paying attention to this problem. When a spoofer is successful, both position and time are spoofed.
A Nov. 3 CNN video report on this subject gives an example of how little people know about spoofing and about the work that has been done on this subject. The report claims that GNSS technology companies have not done much or spent money on this subject. Obviously the reporter doesn’t know what we have done, as I will report here.
I’ll review the spoofing methods and how we counter them.
Source: Javad GNSS
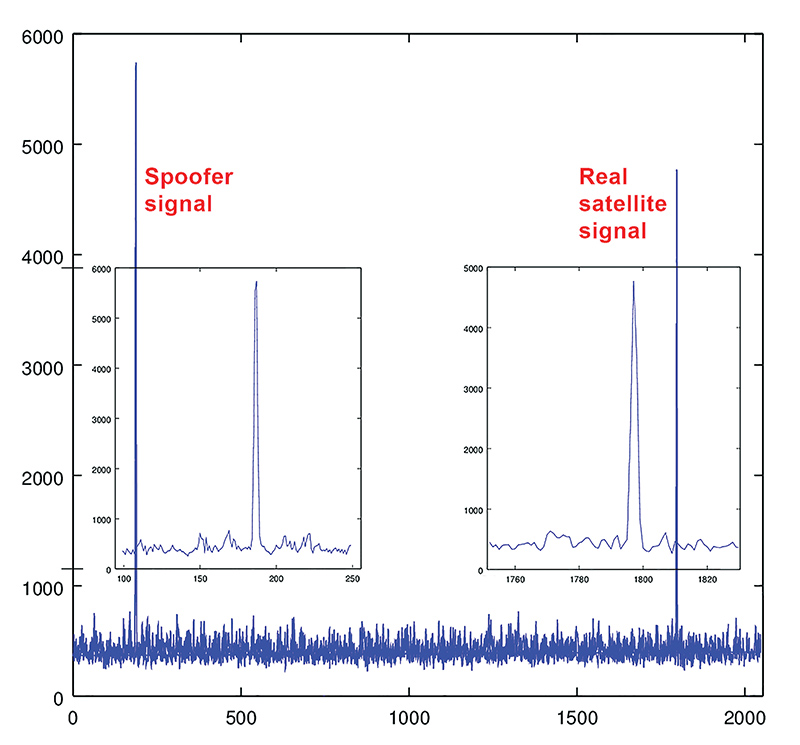
Spoofers use three methods: One simple way is to broadcast GNSS-like signals that provide the wrong ranging information which, when used, creates wrong position and time solutions. Most probably this is the method that Prof. Todd Humphreys used to spoof the GNSS receiver on the $80 million yacht [“GNSS Lies, GNSS Truth,” November 2014 GPS World.] This method fools the GNSS receiver into ignoring the correlation peak of the real satellite signal and using the correlation peak of the spoofer signal. To deal with this type of spoofer we take advantage of the 864 tracking channels and over 130,000 fast acquisition channels of our TRIUMPH chip. We assign more than one channel to each satellite signal and we track all their peaks: The real peak and the spoofer’s peaks. Then in Step 1, below, we exclude all signals with more than one correlation peak.
Method Two is broadcasting spoofed signals for satellites that are below the horizon in the spoofed area or for satellites that do not exist. In this case only one correlation peak exists. Our equipment and OEM boards can download valid and certified almanac data from our website to know the status of satellites and their visibility ahead of their mission. Almanac data can be used for several weeks.
Method Three is to cover the signal of a visible satellite with noise and on top of the noise add the spoofer signal with more power. We recognize such spoofers by their unreasonable signal power and the background noise.
In the first counter-spoofing step we ignore these signals:
Those with more than one peak;
Those that according to our almanac should not be visible;
Those with unreasonably high or inconsistent signal-to-noise ratio (SNR);
Systems whose satellites all have similar SNR.
Satellites that do not generate complete multi-frequency signals (spoofers usually generate only C/A code).
After removing all questionable signals, we use the remaining signals to compute our approximate position. We need at least 4 signals from the many available signals of GPS L1, L2P, L2C, L5, GLONASS L1, L2, L3, and the many signals of BeiDou, QZSS and IRNSS.
In the second step we validate all questionable signals against the approximate position that we have calculated and keep only those that pass our validation. We then re-compute the more precise position using all good signals. We consistently throw away the spoofer correlation peak and use the real satellite signal.
If all signals of all satellites are spoofed, then we warn the user to ignore the GNSS signals and use some other sensors (like compass and gyro) to get out of the spoofed area. A spoofer that can spoof all signals of all satellites will be very expensive to build and deploy.
In a very difficult situation, the user can enter their approximate position to quickly understand if spoofers exist, and then identify them.
All the counter-spoofing methods that I have discussed here are the subject of patents for which we have applied.
Since currently most of spoofers spoof the L1 C/A code, we can simply initially ignore the C/A signals to compute the initial approximate position and use it to identify the spoofed signals.
It is vital that in areas that spoofing danger exists, users employ OEM boards that provide more satellite systems and more signals, rather than using a simple GPS C/A code, for example.
Finally I would like to challenge Prof. Todd Humphreys [professor and director, Radionavigation Laboratory, University of Texas-Austin] to spoof any of our receivers that have this anti-spoofing option. We offer this as an option on all of our OEM boards.
Q: How will safety issues raised by increasing autonomous traffic — in the air and on roads — affect the GNSS industry?
Sanchit Agarwal, VP, Field Operations, Nearmap
A: Due to increasing autonomous traffic, the GNSS industry will have to adopt the concepts of collective tracking mechanisms in the shared ecosystem. Inherently, all the cars/drones (rovers) will have the sensors to track the traffic “on-the-fly” and make intelligent navigation decisions, but in case of any system malfunction, the collective tracking of devices can facilitate “social” interactions between the rovers. This will serve as an added layer of security in case an autonomous social member goes rogue!
Zak M. Kassas, Assistant Professor, University of California, Riverside
A: Future autonomous vehicles will demand full situational awareness and extremely reliable, accurate and secure navigation systems. GNSS will not meet the stringent demands of these autonomous vehicles. To address the inevitable situations where GNSS signals become unusable (due to attenuation or interference) or untrustworthy (due to spoofing), receivers should be coupled with sensors such as IMUs, lidar and cameras, and exploit the plenitude of ambient signals of opportunity such as cellular, digital TV and Wi-Fi.
Jonathan Auld, VP of Engineering and Safety Critical Systems, Novatel
A: Safety issues raised by increasing autonomous automotive and airborne traffic will escalate the product development standards and performance requirements of GNSS software, hardware, and correction services used. The GNSS industry is challenged to increase accuracy on lower cost platforms by utilizing multi-frequency, multi-constellation, sensor fusion and precise point positioning. To be able to rely on GNSS in auto-guidance applications, the industry also needs to incorporate GNSS integrity functionalities into our products.
A: During development of dual-frequency GLONASS RTK support for the Piksi Multi GNSS receiver, GNSS signal simulation was used to test corner cases that are infrequent but catastrophic, such as whole constellation failures. We combined this with our custom-built hardware-in-the-loop infrastructure to test nightly on relevant GNSS scenarios, gaining statistical significance through thousands of runs of the receiver. This iterative approach allowed us to develop GLONASS RTK support in a mere five months.
Andreas Warloe, Senior Director, Systems Engineering, Broadcom Limited
A: GNSS signal simulation was used in all stages of our GNSS chip design and development. Simplified single- or multi-satellite simulations were used to verify search and track channel designs, and carefully calibrated simulations were used to characterize receiver losses. Later, full system simulations were used in large-scale regression testing, interference testing and corner case tests. Simulator testing has been critical for supporting new signals that weren’t widely available in the early chip design phases.
A: We use GNSS simulators throughout the design cycle, from prototyping to mass production. The benefits of testing in a reliable, repeatable lab environment became very clear when we needed to exercise co-location of Bluetooth and GNSS in a module. Testing in a controlled signal environment allowed us to keep the GNSS signals constant while adjusting the Bluetooth signal levels, allowing us to verify the robustness of our design over the full temperature and voltage range.
Q: What is the GNSS/PNT industry “Issue of the Year”?
Jose Angel Avila Rodriguez, signal and security implementation engineer, European Space Agency
A: The growth of PNT applications has been impressive and will continue. Assurance of PNT will thus gain an ever-increasing role, in both the security and the civil domains.
For GNSS, the key PNT contributor, there is in addition another challenge: its piece in the PNT cake will be contested by newcomers, such as telecom networks. Whether we will continue talking about A-GNSS or instead talk about Assisted 5G, with GNSS in that case taking on the role of signal of opportunity — that will depend on today’s decisions about future GNSS upgrades, the modernized versions of Galileo second generation, GPS III, and Beidou/Compass III, that will be flying around 2040.
Gyles Panther, president and CTO, Tallysman Wireless, Inc.
A: The key issues for PNT going forward, and into the indefinite future, are simply stated: availability and accuracy. Re-deployment of the eLoran infrastructure is a no-brainer. A potentially highly negative step would be the introduction of communication services within the mobile satellite L-band downlink frequency band (1525 MHz to 1559 MHz). Multi-constellational receivers track a much larger number of satellites and better disposed SVs (space vehicles) provide a lower horizontal DOP and hence greater accuracy.
Finally, GNSS needs to be defended against interference both intentional and accidental. Why on earth would we want to damage something that is providing so much utility to mankind?
Q: How can the safety, security, and full utility of GNSS applications be ensured while evolving to the best and most efficient use of limited and extremely valuable electromagnetic spectrum?
Mitch Narins, principal consultant, Strategic Synergies, LLC
A: (1) Agree that “No electromagnetic spectrum use will be approved, now or in the future, that impacts GNSS PNT users.” – a common mission statement essential to establishing trust!
(2) Determine how best to migrate today’s GNSS PNT users to be more resilient to both interference and planned future adjacent band services.
(3) Provide detailed architectures, network layouts, and implementation plans for rollout of new adjacent band services compliant with (1) and supportive of (2).
A: We cannot ignore fielded legacy systems, but neither can we chain ourselves to old technology and hinder progress.
Spectrum usage cannot be solved by less regulation, but it can be with innovative regulatory ideas adhering to minimalist principles. For example, would a “cash for clunkers” program work to eliminate weak receivers from the field to enable more efficient spectrum use?
This is one of those situations where government involvement can spur an innovative solution.
A: Integration with GNSS and other sensors in most every military vehicle or weapon-control system will enable inertial sensor developers to focus on driving improvements in performance for the two fundamental parameters that a sensor-fusion INS filter cannot estimate: noise and in-run bias stability. Ultra-tightly coupled sensor fusion of GNSS with range-, speed- and video position-sensing, with tactical and navigation grade inertial sensors optimized for noise and in-run, will enable design of robust GPS chip-level solutions for high-dynamic, high-performance navigation for nearly any military environment or engagement.
Michael Whitehead, chief technology officer, Hemisphere GNSS
A: Previously used for military applications, inertial technology has become mainstream as performance-to-cost has improved with the emergence of low-cost microelectromechanical systems (MEMS). Precise point positioning (PPP) advancements have driven GNSS accuracies to 4 cm or better, but long PPP initialization times are problematic in challenging environments where reconvergence is often required. Tightly coupled integration of PPP and navigation-quality MEMS will overcome limitations of both technologies, yielding high accuracy with high availability, even in challenging environments.
Chris Wheeler, manager, telematics and connected sites, Trimble Navigation
A: The availability of multi-frequency GNSS receivers with inertial components on a small lightweight board can now deliver centimeter-accurate INS/GNSS solutions, so that OEMs and integrators can significantly improve reliability and robustness in harsh or GNSS-denied applications or for solutions such as UAVs. The advances provided by MEMS inertial components increase overall efficiency by reducing the number of ground control points while still meeting the needs for a low weight and power consumption solution.
Q: Where is leading technology trending for UAV navigation in complex, unstructured, and uncertain (GNSS-denied) environments in industrial applications?
A: Tight integration between GNSS and inertial navigation systems (INS) can provide accurate, reliable navigation in GNSS-challenged environments, and advances in MEMS inertial technology continue to push the performance of systems that meet the size, weight and power requirements for UAV systems. These GNSS/INS sensors will continue to improve and form the core of the navigation system as additional navigation aids, such as computer vision, are added to address more demanding GNSS-denied applications.
Alexis Guinamard, Chief Technical Officer, SBG Systems
A: Industrial UAVs need trustworthy navigation units. Drastic sensor selection, thermal calibration, and signal processing techniques are mandatory to cope with high temperature / vibrating environments. Advanced algorithms design is also a key to make UAV navigation more reliable in challenging environments: An extended Kalman filter that fuses inertial and GNSS data maintains an accurate trajectory, even during GNSS outages. Next challenge is to get real-time inertial data fusion with GNSS, and vision or Lidar sensors!
Jan Van Hees, Director Business Development, Septentrio
A: Inertial sensors, vision and radar-based distance sensors provide positioning in GNSS-challenged environments. However, experience teaches that even there, GNSS signals can often be received, albeit intermittent or badly disturbed. And GNSS is still the easiest absolute positioning reference available. Therefore, much effort goes into developing robust GNSS technology with reliable quality information, which continues to play a crucial role in the positioning solution, fused with the aforementioned technologies.
Q: What is the potential for low-Earth orbit constellations to augment services provided by the four medium-Earth orbit GNSS?
Doug Taggart, President, Overlook Systems Technologies, Inc.
A: With more than one hundred GNSS satellites broadcasting on three or more frequencies, our international constellation of medium-Earth orbiting (MEO) satellites will provide a combination of path diversity and frequency diversity. However, satellites in low-Earth orbit (LEO) should be added to our MEO mélange to provide orbital diversity and thus cyber safety. The LEO satellites would have 20 dB less path loss and compel jammers and spoofers to become conspicuous. Even with only one LEO in view, we would be able to use the LEO signal as a hot clock to improve the robustness of GNSS signal acquisition by our users. For timing applications, a solitary LEO satellite would enable time transfer to fixed locations worldwide.
Per Enge, Professor and Director, Stanford university Center for Position Navigation and Time
A: While it is prudent to take advantage of multiple PNT sources, the devil is in the details. Are users seeking more availability, accuracy, integrity and/or resilience to fill gaps? What is the complexity and cost for integration in user equipment, the reliability compared to other augmentations, the applications to be supported, vulnerability to interference, and so on? Additionally, all things from space may not be the best solution when all user needs and vulnerabilities are factored in.
A: Very worried. Just about any connected device can be hacked, including iPhones or Android phones, regardless of fingerprint recognition technology or complex passwords. Hackers can listen to conversations or access the location positioning via flaws in a portion of mobile networks called Signaling System 7. Hackers using common software-defined radio tools have discovered a cheap way to make a GPS emulator to falsify the GPS location of smartphones and in-car navigation systems.
Headshot: Paul McBurney
Paul McBurney, Founder, CEO, Gopherhush Corp.
A: Mobile phone users will share location-based information of business travel mileage, driving
behavior for usage-based car insurance, toll-road usage, or even time cards. The best way for the receiving party to protect against location hacking or even errant fix data is to require cross-checking of the location data with multiple location sources based on GNSS, OS network location, Wi-Fi and Bluetooth reference points, and even the phones sensors. It’s RAIM against hacking.
Headshot: Todd Humphreys
Todd Humphreys, Professor, Director, Radionavigation Lab, University of Texas
A: We usually don’t mind some people knowing our position some of the time, but it’s uncomfortable to think that a hacker or a government could accurately track our position whenever they want. Your credit card number is a lot more valuable to the average hacker than your location, so the danger of location theft is low, unless you’re the special target of someone’s profiling or blackmail scheme. As for a hacker corrupting a location, this is a serious problem that needs addressing if connected cars are ever to trust one another’s data.