ADVA has released new software that extends its Oscilloquartz timing assurance technology to synchronization networks using Network Time Protocol (NTP).
ADVA’s Ensemble Sync Director management system provides assurance control, helping mission-critical services across many industries that depend on reliable and accurate NTP timing.
The new NTP capabilities are extended from ADVA’s robust Oscilloquartz Precision Time Protocol (PTP) product range and supported by Syncjack GNSS monitoring. They also leverage multiple form factors with redundant synchronization devices, multiple holdover options and versatile multi-technology gateways between GNSS, PTP and NTP, ensuring robust, scalable and highly resilient NTP timing architectures.
“Despite the availability of PTP, NTP remains the most widely used time synchronization protocol,” said Gil Biran, GM of Oscilloquartz, ADVA. “It’s applied in many legacy networks as well as new IoT (internet of things) applications. What’s more, the sophistication of NTP timing is increasing, while the NTP protocol itself remains unchanged. Now we’re enabling our customer to deploy robust, reliable and secure NTP implementations built on our unique expertise and experience in delivering assured synchronization.”
ADVA uses a combination of NTP architecture and highly accurate GNSS timing backed up with PTP timing domains.
Because ADVA’s products now support assured NTP technology, they offer customers virtually unlimited scale, Biran said. “With hardware-implemented NTP functionality, even the smallest SFP (small-form factor pluggable) NTP server can support up to 500,000 transactions per second.”
To ensure NTP delivery is able to withstand a broad range of risk scenarios, ADVA’s resilient synchronization solution is engineered for both device and network redundancy. It features multiple backup options such as PTP- and GNSS-delivered time, as well as a variety of oscillator solutions that allow different levels of holdover.
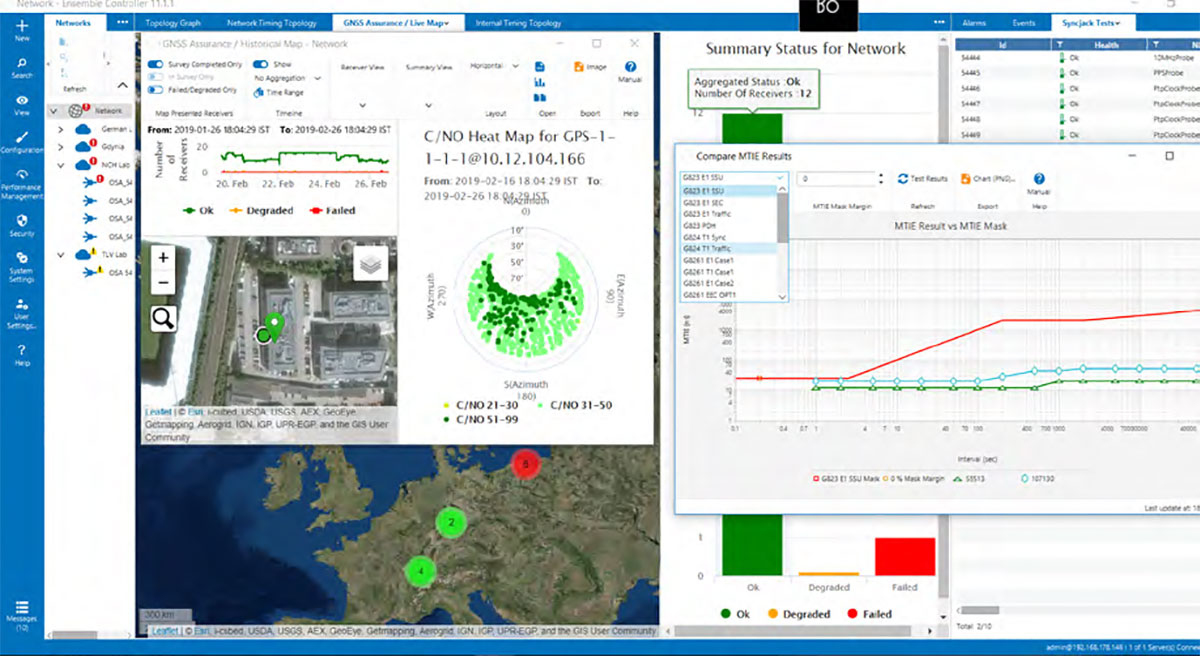
Comprehensive monitoring by ADVA’s Ensemble Sync Director management system helps guarantee the levels of performance required for time-critical network applications. Designed from the bottom up to support continuous assessment and assured timing precision, it automatically responds to any issues before applications can be disturbed by timing inaccuracies.
ADVA’s solutions also offer centralized GNSS monitoring and assurance, protecting timing networks from vulnerabilities, including jamming and spoofing attacks.
Customers can build NTP-based networks today and switch to PTP with one click, commented Nir Laufer, vice president of product line management at Oscilloquartz, ADVA. “Our customers no longer need to hope for the best from their NTP servers,” Laufer said. “With real-time GNSS monitoring and comprehensive probing and analysis of timing quality, they can rest assured that their synchronization services have the highest levels of accuracy, integrity, availability and scale.”
A new monitoring system developed through an ESA-backed project works like a bodyguard for satellite navigation in use at strategic or safety-critical sites. Known as GIDAS, the scalable system immediately detects, identifies and pinpoints satnav interference sources in its vicinity.
It is estimated that there are currently the same number of satnav receivers on Earth as there are people. Positioning, navigation and timing signals from space-based constellations such as Galileo and GPS form an invisible, essential infrastructure, underpinning numerous modern aspects of modern life: communications, power and transportation.
Satellite navigation helps guide a growing number of aircraft, boats, trains and autonomous vehicles. Meanwhile satnav-based time stamps authentic multi-billion euro financial transactions, and coordinate the synchronised running of power grids. Satellite navigation is always on, available everywhere on Earth, so it is easy to take its availability for granted. But as crucial as these signals from space are, they are also vulnerable to ground-based interference.
“It’s simply a matter of output power,” said Andreas Lesch of Austria-based OHB Digital Solutions. “A navigation signal on the ground is equivalent to the light from a 60-watt lamp aboard a satellite, some 23,222 km away in space in the case of Galileo. So these faint signals can be jammed by more powerful local radio signals, either accidentally or deliberately, or even misleading fake navigation signals, known as spoofing.”
“Our new GNSS Interference Detection and Analysis System, GIDAS, is designed to safeguard critical infrastructure against jamming or spoofing, by performing continuous monitoring of key signal bands. By doing so, GIDAS can raise the alarm in real time, identify the type of interference then pinpoint the location of these dangerous portable devices causing the interference so the authorities can take immediate remedial action.”
GIDAS can provide interference detection and directionality with a single reporting station, although a minimum of three stations are required for pinpointing interference sources, linked to an overall monitoring center. Monitoring centers can also be connected together, making the GIDAS system easily scalable, from safeguarding an individual harbour, airport or system critical site up to an entire city or region.
GIDAS can provide interference detection and directionality with a single reporting station, although a minimum of three stations are required for pinpointing interference sources, linked to an overall monitoring center. (Photo: ESA)
“People are only now catching up to the seriousness of this problem,” adds Andreas. “Surveys of the highest-density parts of Europe surveys report around three to four jammers hourly.
“These small devices are technically illegal but are easily available online for a few hundred euros or less, often marketed as personal privacy devices. Jammers are sold as having a range of only a few metres, but can turn out to have a practical range of dozens of metres or more — leading to unintentionally widespread interference, like the famous jammer-equipped U.S. truck driver who shut down Newark Airport navigation systems whenever he drove past.
“Spoofing is more serious still, with a strong criminal element, where false satellite navigation signals replace real ones, to mislead receivers about their position, employed in the past to down put drones or divert boats.
“Working in this field for eight to nine years, we have seen a strong growth in interference, even as GNSS becomes ever more crucial. With our passion for GNSS and signal processing, we decided to something practical to combat this development, delivering rapid detection, classification and localisation of interference to our customers.”
GIDAS was developed by OHB Digital Solutions and Joanneum University through ESA’s Navigation Innovation and Support Programme (NAVISP), working with European industry and academia to develop innovative navigation technology.
“The company initiated the project through NAVISP’s second element, focused on strengthening European competitiveness in the navigation arena, proceeding on a co-funded basis,” said engineer Thomas Burger, overseeing GIDAS project for ESA. “The plan was to enable a commercially attractive business to get started, and I’m happy to say we made it.”
“Considering the budget, the project had a wide scope, including the development of a multi-constellation GNSS receiver with all processing stages, an extended digital front end for jamming and spoofing detection, processing blocks transferred to a parallel processor based on a customised fully programmable gate array.
“And that was only one ingredient of the overall GIDAS system, also including the actual interference detection machinery, the interference locating subsystem, and all the communication, database, and graphical user interface elements needed to create a distributed, human-usable system — which is able to go on working autonomously, only asking for human involvement when events are detected.”
Now that its two-year NAVISP project has concluded, GIDAS is now being rolled out to several Europe-based governmental and private sector customers.
Cost-effective, high-performance antenna designed for GNSS networks and monitoring applications
Photo: CHC Navigation
CHC Navigation has released the AT661 geodetic antenna for GNSS networks or monitoring applications. The AT GNSS antenna series is the result of years of expertise in GNSS technologies. The compact geodetic GNSS antenna offers performances rivaling those of high-cost and bulky conventional GNSS choke ring antennas, according to CHC Navigation.
The AT661’s supports all current and future GNSS signals, including GPS, GLONASS, BeiDou, Galileo, QZSS, IRNSS, SBAS and L-band. The antenna features both high-gain LNA and wide beamwidth to provide excellent flexibility in applications requiring low-elevation satellite reception and high availability of GNSS signals, especially in obstructed situations.
“By further integrating the design and manufacture of GNSS antennas, CHC Navigation is broadening its presence as a global provider of GNSS solutions.” said George Zhao, CEO of CHC Navigation. “Mastering the entire GNSS positioning and navigation value chain allows us to deliver the performance our customers demand at the price they expect.”
The accuracy of the antenna’s phase center reaches the millimeter level with extremely high stability and repeatability to ensure perfect processing of GNSS data regardless of the length of the baselines.
Built to last, the AT661 withstands all types of weather, including high and low temperature fluctuations, and is protected by a waterproof radome.
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Photo: Nuro
Hey, R2, Where’s my pizza?
Domino’s pizza will start using Nuro’s R2 unmanned vehicles for delivery in Houston, Texas, later this year. Once customers have opted in, they can track the R2 vehicle via the Domino’s app and will be provided with a unique PIN code to unlock a compartment to get their pizza. Nuro is already at work in Houston delivering goods from dinner to dry cleaning.
Screenshot: BBC
Drone Attack
A BBC documentary has sent the drone industry into a tizzy. “Britain’s Next Air Disaster? Drones” begins with the December 2018 Gatwick Airport incident when two drones entering airport airspace led to a disruption of operations for three days. Dronemakers dislike the documentary’s thrust that drones are a threat to public safety and a tool for terrorists, while barely mentioning their positive contributions in fields such as search and rescue, plant inspections and agriculture.
Photo: Rawpixel.com/Shutterstock.com
NavIC Rising
The Indian Space Research Organisation is in talks with chipmakers Qualcomm and Broadcom to substitute GPS in Indian mobile phones with its own satellite system (NavIC). The Times of India noted that cellphones hold the biggest commercial potential for NavIC, with more than 650 million mobile users in India. ISRO and the Indian Air Force are also working to equip fighter jets with the navigation system, and commercial vehicles registered after April 1 are mandated to have NavIC trackers.
Photo: Monitum Pty Ltd.
Infrastructure sensors are Mthing
Internet of things (IoT) project Mthing is researching GNSS monitoring sensors to record near-real-time measurements of infrastructure construction. The 18-month project in Brisbane, Australia, aims to develop GNSS IoT sensors that will provide cost-efficient, constant and high-precision monitoring that will connect to cloud services and provide instant alerts. Mthing aims to produce low-cost sensors with broad market potential. The research team includes Queensland University of Technology, survey company Monitum, and the Innovative Manufacturing Cooperative Research Centre.
The second satellite of Japan’s Quasi-Zenith Satellite System (QZSS) has started transmitting navigation signals. QZS-2, or Michibiki-2, was launched on June 1, 2017, and joins its predecessor QZS-1 (Michibiki-1), which has been in orbit since September 2010.
Both satellites have been placed into inclined geosynchronous, elliptical orbits, which enable extended satellite visibility periods over Japan and are characteristic features for this regional navigation system.
The third satellite QZS-3 was launched on Aug. 19, 2017, into a geostationary orbit. If all goes according to plan, a fourth satellite in an eccentric orbit will follow by the end of this year and complete the constellation.
Three of six new Lockheed Martin-developed receivers are now deployed at U.S. Air Force monitoring stations to maintain the accuracy of GPS satellite signals.
In June, the first Monitor Station Technology Improvement Capability (MSTIC) receiver became operational at Cape Canaveral Air Force Station, Florida. Upgrades continued at USAF monitoring stations at Kwajalein Atoll and Hawaii. These upgrades from early 1990s technology are part of an overall effort to modernize the current GPS ground control system, known as the Architecture Evolution Plan Operational Control Segment.
MSTIC software-defined radio technology replaces legacy receivers’ hardware-based application-specific integrated circuit platform. MSTIC leverages commercial off-the-shelf hardware without the need for custom firmware. Standard interfaces and architecture configurability simplify sustainment and enable MSTIC software to migrate to new hardware platforms as commercial vendors increase processing power, improve reliability and enhance cybersecurity. MSTIC enables remote application of mission-specific software updates to improve performance and enable reception of modernized GPS signals, according to the company.
The three remaining GPS Monitoring Stations will be upgraded with MSTIC receivers by the end of 2017.
The navigation payload before integration into the second GPS III SV, which now is in environmental testing. (Photo: Harris)
GPS III Payloads Delivered
Harris Corporation has delivered the third of 10 advanced navigation payloads to Lockheed Martin. The payloads will increase accuracy, signal power and jamming resistance for GPS III satellites. They feature a Mission Data Unit (MDU) with a 70-percent digital design that links atomic clocks, radiation-hardened computers and powerful transmitters, enabling signals three times more accurate than those on current GPS satellites. The new payloads also boost satellite signal power, increase jamming resistance by eight times and help extend the satellite’s lifespan.
The payload was integrated into GPS III SV03 over the summer. The first navigation payload is integrated aboard GPS III SV01, which is in storage awaiting expected 2018 launch.
Harris announced it is in full production and on target to deliver the fourth GPS III navigation payload to Lockheed Martin in fall. Harris is also developing a fully digital MDU for the U.S. Air Force’s GPS III Space Vehicles 11+ acquisition. The new MDU will be demonstrated in fall 2017 and provides even greater flexibility, affordability and accuracy versus existing GPS satellites.
Next GLONASS-M Readied
The Russian navigation satellite GLONASS-M 52 moved from ISS-Reshetnev Company’s assembly plant to the Plesetsk Cosmodrome launch site about 800 km north of Moscow in August. One of the system’s ground spares, it was built more than two years ago and stored awaiting launch. The satellite is due to launch in September.
There are six GLONASS-M satellites in ground reserve.
A GNSS monitoring solution integrated into a stand-alone receiver detects fast movements of man-made and natural structures in real time.
The new product from Leica Geosystems, dubbed VADASE, runs onboard Leica reference stations and monitoring receivers. The Leica Velocity and Displacement Autonomous Solution Engine (VADASE) provides an in-depth look into fast movements using unique processing algorithms. In real time, accurate high-rate velocity and displacement information of various activities and structures are provided to engineers and researchers for a complete, precise and reliable monitoring solution, Leica said.
Leica VADASE delivers actionable information independent of any GNSS real-time kinematic (RTK) correction service in real time. Displacement events are recorded on board a single stand-alone GNSS receiver, and the user can be notified by email. With this instant information, professionals receive a deeper understanding of how structural movements occur and can take necessary actions to mitigate damages and potentially save lives, the company said.
Leica VADASE does not require additional hardware or infrastructure for differential processing (such as one or more reference stations or global correction services for precise point positioning); it provides autonomous processing capability with no extra equipment or services needed.
Users can also apply the latest versions of Leica SpiderQC, Leica GeoMoS or any other customized software for advanced data visualization, analysis, threshold verification and notification.
Multiple Constellation Processing in the International GNSS Service
By Tim Springer and Rolf Dach
Does combining GPS and GLONASS observations make a difference? The International GNSS Service (IGS) has been providing such data for several years. Representatives from two IGS analysis centers discuss the past, present, and future of IGS GNSS monitoring and product development.
INNOVATION INSIGHTS by Richard Langley
ARE WE THERE YET — at a multiple-constellation GNSS world? The European Galileo system only has two test satellites in orbit, with constellation completion not scheduled until 2014. The Chinese Beidou/Compass system has launched some test satellites, but global coverage is not promised until 2020. And the first Japanese Quasi-Zenith Satellite System space vehicle is scheduled for launch this year with the system not fully operational until 2013. So, does this mean GPS is still the only game in town? No, not by a long shot. We have overlooked Russia’s GLONASS.
Standing for Global’naya Navigatsionnaya Sputnikova Sistema, GLONASS was conceived by the former Soviet Ministry of Defence in the 1970s, perhaps as a response to the announced development of GPS. The first satellite was launched on October 12, 1982. But because of launch failures and the characteristically brief lives of the satellites, a further 70 satellites were launched before a fully populated constellation of 24 functioning satellites was achieved in early 1996. Unfortunately, the full constellation was short-lived. Russia’s economic difficulties following the dismantling of the Soviet Union hurt GLONASS. Funds were not available, and by 2002 the constellation had dropped to as few as seven satellites, with only six available during maintenance operations! But Russia’s fortunes turned around, and with support from the Russian hierarchy, GLONASS was reborn. Longer-lived satellites were launched, as many as six per year, and slowly but surely the constellation has grown to 21, with two in-orbit spares.
But are there any users outside Russia? Although dual-system GPS/GLONASS receivers have been around for at least a decade, manufacturers have taken notice of GLONASS’s recent phoenix-like rebirth. All of the high-end manufacturers now offer receivers with GLONASS capability. Does combining GPS and GLONASS observations make a difference? You bet — just ask any surveyor who uses both systems in the real-time kinematic (RTK) approach. Scientific applications requiring high-accuracy satellite orbit and clock data also benefit. The International GNSS Service (IGS) has been providing such data for several years, and in this month’s article representatives from two IGS analysis centers discuss the past, present, and future of IGS GNSS monitoring and product development.
So, getting back to our question, are we there yet? Many early adopters of GPS plus GLONASS data and products would reply with a resounding “yes.”
“Innovation” features discussions about advances in GPS technology, its applications, and the fundamentals of GPS positioning. The column is coordinated by Richard Langley, Department of Geodesy and Geomatics Engineering, University of New Brunswick.
In 2005, the International GPS Service (IGS) was renamed the International GNSS Service. With this change, the IGS governing board and the IGS community expressed their expectation to extend activities from the well-established GPS to other active and planned global navigation satellite systems such as GLONASS, Galileo, and Compass. Meanwhile, the GLONASS satellite constellation, as well as the IGS GNSS tracking network, have evolved significantly. Since 2003, the GLONASS satellite constellation has been improving steadily, leading to the current, May 2010, constellation with 21 operational satellites and two in-orbit spares. And starting in 2008, the GNSS capabilities of the IGS tracking network have been greatly enhanced giving rise to a truly global GNSS tracking system with more than 100 GNSS (GPS plus GLONASS) receivers. The almost-complete GLONASS satellite constellation, coupled with a readily available global tracking network with high-quality receivers, have greatly increased the interest in and need for GNSS products such as precise satellite orbit ephemerides. However, the IGS analysis center products are still mainly GPS-only. Only two analysis centers provide true multi-GNSS solutions. Two analysis centers provide GLONASS-only solutions (a GLONASS combined IGS product is available but without accurate clocks). No combined IGS GNSS product exists. In view of the large interest from the user community, this is a really disappointing situation. In particular, because experiences gathered with handling GPS plus GLONASS will make the incorporation of other GNSS such as Galileo, Compass, and the Quasi-Zenith Satellite System (QZSS) that much easier.
However, during a meeting of the IGS analysis centers in December 2009, it became clear that many of the centers had started to implement and enhance the GLONASS processing capabilities in their software. This was happening as a direct consequence of the improvements in the GLONASS constellation, the IGS GNSS tracking network, and increased user interest (if not demand). Throughout 2010 and 2011, we will therefore see a significant increase in the number of true GNSS solutions within the IGS. A very positive development for the GNSS world.
In this article, we give an overview of the recent developments in the area of multi-GNSS processing within the IGS in general, but with a focus on the activities of the two analysis centers in the IGS that are leading the GNSS efforts: the Center for Orbit Determination in Europe (CODE) and the European Space Operations Center (ESOC) of the European Space Agency.
Why GNSS?
Within the IGS, we are often confronted with the question: Why GNSS? Why should I go through the burden of adding GNSS capabilities to my software, having larger processing loads, and so on, for little or no benefit? Well, from an IGS analysis center point of view, this question is valid. The accuracies achieved with GPS alone are so good that there will be little visible benefit of including another system. Nevertheless, there are indeed benefits.
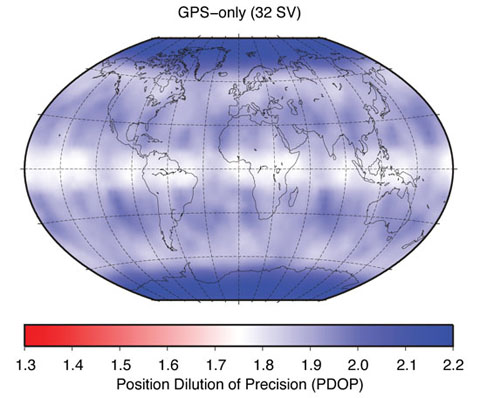
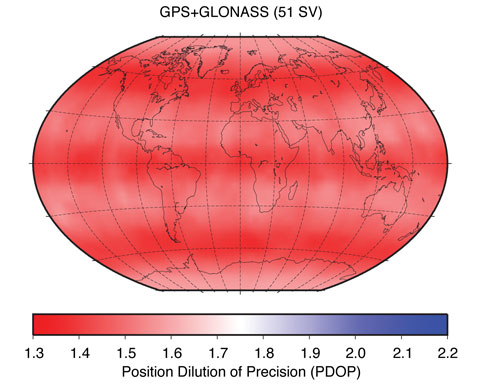
There is a large number of users worldwide who would see benefits of using GNSS products compared to GPS-only products. Clearly, all real-time users will benefit enormously from the increased number of satellites. Figure 1, showing the so-called position dilution of precision (PDOP), demonstrates this very clearly. The two panels in Figure 1 show the GPS-only PDOP and the GPS-plus-GLONASS PDOP using the satellite constellation of May 3, 2009.
FIGURE 1A. Effect of GLONASS on position dilution of precision.FIGURE 1B. Effect of GLONASS on position dilution of precision.
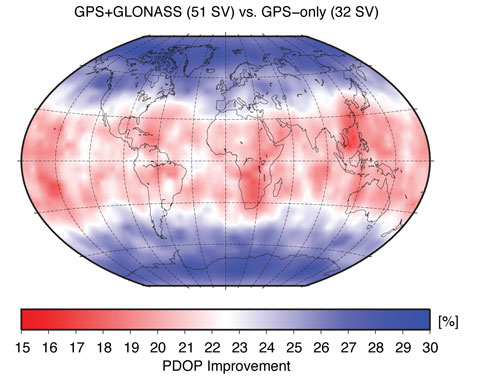
Figure 2 shows the PDOP improvement in percentage when comparing the GPS-only to the GPS-plus-GLONASS PDOP values. At high latitudes, that is, above 55 degrees, the improvement is at the 30 percent level. At mid-latitudes, the improvements are still well above 15 percent, demonstrating the significant improvements real-time GNSS users may expect compared to real-time GPS-only users.
Figure 2. Position dilution of precision improvement using GLONASS.
With the current GPS constellation, daily solutions are not limited by the number of available satellites, but rather by the analysis models (such as that for the troposphere), calibration uncertainties (such as models for antenna phase-center variation), and environmental effects (such as multipath). For these reasons, IGS-like processing strategies, in which data from reference stations are processed in 24-hour batches, will not show clear benefits from adding data from more satellites and other systems.
However, besides real-time users, users at high latitudes (including the whole of Canada and most of Europe) will see improvements. Recently, several researchers have noticed that for latitudes higher than 50 degrees, the addition of GLONASS brings benefit. This is, of course, thanks to the higher orbital inclination of the GLONASS satellites (about 64 degrees) compared to the inclination of the GPS satellites (about 55 degrees), which is also very nicely demonstrated in the PDOP (see Figure 1). So, from a service point of view — the “S” in IGS — there is a clear need to provide GNSS solutions to the user community. Besides offering significant benefits in terms of accuracy, the increased number of satellites will also make solutions more reliable and robust. The completely different repeat cycle of the GLONASS satellite orbits is especially important as it changes the sensitivity to multipath completely. Multipath effects in GPS-only data repeat almost perfectly from day to day with a 4-minute time shift giving rise to spurious, near yearly signals in GPS time series. Satellites from other constellations, such as GLONASS, introduce other system-related frequencies, which results in a general reduction of such GNSS-induced frequencies in a multi-GNSS solution.
Because of the constellation design, each GPS satellite follows its own ground track in each orbit cycle. That means that at a ground station, each GPS satellite is observed on one and the same track each day so that a systematic influence of a satellite (such as a mismodeling of the satellite antenna position with respect to the satellite’s center of mass) has a systematic effect on the obtained (daily) station positions. This systematic translation of satellite-related errors into station-related parameters doesn’t happen for any other GNSS constellation.
IGS GNSS Analysis Centers
A detailed description of the IGS is beyond the scope of this article; an excellent overview was provided in an earlier Innovation column. We simply point out here that it is important to know that the IGS serves as the reference in many GNSS applications by providing data and products of the highest possible quality. Very well known and widely used are the tracking data from the IGS station network — the raw pseudorange and carrier-phase measurements — and the orbit and clock products of the GPS satellites. The IGS generates these products by combining the orbit and clock solutions of the individual analysis centers that contribute to the IGS. For the GPS-only products, 10 different analysis centers contribute to three different product series called the ultra-rapid, rapid, and final products. The final products deliver the highest possible quality but have the longest delay, as they become available 12 days after the end of the observation week. The rapid products are roughly comparable in quality to the IGS final products, but they are delivered daily with a delay of only 17 hours after the end of the observation day. The ultra-rapid products are delivered four times per day 3 hours after the end of the last used observation. For example, at 03:00 UTC, an ultra-rapid product is delivered that used data up to 00:00 UTC. It consists of two parts: an estimated part and a predicted part that may be used for real-time purposes. The quality of the estimated part is very similar to that of the rapid products. The predicted part is, of course, significantly less accurate, although the orbits have an astonishing precision of well below 30 millimeters — much better than that of the orbits in the satellites’ broadcast navigation messages.
In addition to these GPS-only products, there is also a GLONASS product. However, contrary to the GPS side of things, for GLONASS, only a final product is generated. Four analysis centers provide products for the IGS GLONASS combination: the Bundesamt für Kartographie und Geodäsie (BKG), Frankfurt am Main, Germany; CODE, based at the Astronomical Institute of the University of Bern, Switzerland; ESOC, Darmstadt, Germany; and the Information-Analytical Center (IAC) of Roscosmos, Moscow, Russia.
The analysis centers BKG and IAC determine the GLONASS satellite orbits, introducing the information for the GPS satellites from the IGS solution without further estimation. The analysis center CODE provides, since May 2003, orbits for GPS and GLONASS based on a rigorously combined analysis of the data of both GNSS, that is, a true multi-GNSS solution. Since January 2008, ESOC follows this strategy as well. From these four analysis centers, only two, ESOC and IAC, provide satellite clock estimates for the GLONASS satellites. This situation prevents the IGS from making a robust and reliable combined GLONASS clock product. With four analysis centers contributing to the orbits, the IGS can and does make an excellent GLONASS combined orbit product.
In our definition of true multi-GNSS solutions, the measurements from each system contribute to all relevant parameters to the same extent. This can only be achieved by the rigorous combined processing of the data from all available GNSS. The two-step approach, introducing the GPS solution when solving for the GLONASS orbits and satellite clocks, is regarded as an extension of a GPS-only solution to GLONASS. As the contributions from BKG and IAC in the IGS GLONASS product demonstrate, this two-step procedure provides excellent results.
From a user point of view, a big disadvantage is the fact that the IGS does not provide a real GNSS product. The IGS provides a high-quality GPS product and a high-quality GLONASS orbit product, but there is no combined GNSS product. Also, the IGS is only capable of generating final GLONASS products because only two analysis centers, CODE and ESOC, submit GNSS products for the rapid and ultra–rapid products. IGS policy requires contributions from at least three analysis centers for a meaningful and robust combined product.
Users of GNSS orbits and/or clocks therefore have to use the products of one of the individual analysis centers or combine the GPS-only and GLONASS-only products from the IGS. Here, the GNSS products of the CODE and ESOC analysis centers are clearly preferable over those of the IGS and other analysis centers since these are the only two true GNSS products that guarantee the full consistency between the two GNSS.
GLONASS Tracking Network
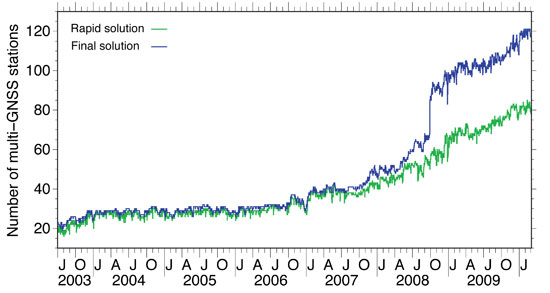
Until 2003, the IGS had established a GLONASS tracking network of merely 20 stations. In 2003, this number grew rapidly from 20 to 30, but after 2003 the number of stations remained stable for quite a long time with a very inhomogeneous distribution. For example, there were only a few stations in the whole western hemisphere. In 2006/2007, a new generation of combined GPS/GLONASS receivers became available, produced by several well–known GPS receiver manufacturers. With this new equipment available, the number of GLONASS tracking stations in the IGS network started to increase steadily. In 2008, the increase rate went up significantly (see Figure 3) and, more importantly, the global distribution of the receivers improved as, finally, significant numbers of stations started to emerge in both North and South America. Orbits and clocks of the GLONASS satellites are, since ear
ly 2009, determined from the data of more than 100 globally well-distributed tracking stations in the IGS network (see Figure 4). A good global distribution of observing sites is extremely important for orbit determination and even more so for the clock determination. Until early in 2008, the GLONASS clock determination suffered from gaps in the global tracking network, which had severe impact on the clock estimates. If tracking gaps cause an interruption of the carrier-phase tracking of a GNSS satellite, the clock estimates are basically reset and a jump will occur. The size of the jump is delimited by the accuracy of the code (pseudorange) observations, that is, at the 1-meter level, or 3 nanoseconds in clock terms.
We may state that today orbit and clock determination for the GLONASS satellites may be based on a truly global tracking network of high-quality geodetic–type receivers. This significant improvement is due to the efforts of many IGS station managers and their institutions.
Figure 3. Number of sites in the IGS network providing GLONASS data, used for orbit determination at CODE.Figure 4. Current distribution of IGS combined GPS and GLONASS tracking stations.
GLONASS Constellation
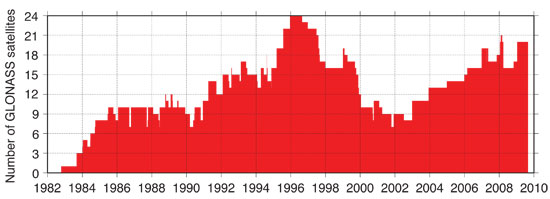
After reaching a full orbit constellation of 24 satellites in early 1996, the GLONASS constellation degraded rapidly due to Russia’s economic difficulties following the break-up of the Soviet Union coupled with the short lifetime of the GLONASS satellites. Since 2002, the GLONASS constellation has slowly but surely been rebuilt (see Figure 5). Currently, there are 21 active modernized GLONASS (GLONASS-M) satellites, which have a significantly longer lifespan compared to the original satellites. Additionally, there are two reserve satellites on orbit.
Figure 5. Development of the GLONASS satellite constellation since 1982.
Russia intends to have a full 24-satellite constellation in place by the end of 2010. To achieve this goal, two more triple-satellite launches are planned, one in August and one in November. The November launch could include a new type of GLONASS satellite, GLONASS-K. The GLONASS-K version is a lighter, unpressurized spacecraft, with a design lifetime of 10 years. In addition to the legacy frequency-division-multiple-access signals, it will transmit code-division-multiple-access signals and use an additional frequency band overlapping with the GPS L5 band.
Orbit and Clock Accuracy
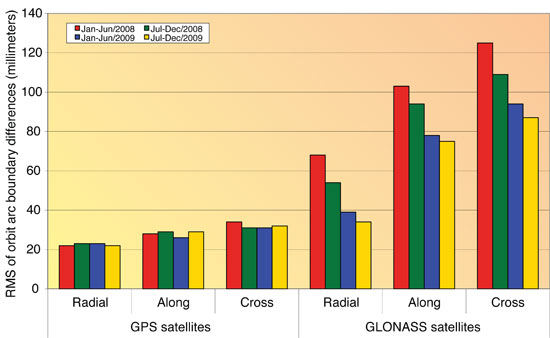
The developments of both the GLONASS tracking capabilities of the IGS station network as well as the steady increase in the number of GLONASS satellites has had a positive influence on the accuracy of the GLONASS orbits and clocks. It also has significantly increased the interest in the GLONASS system. The enhancement of the IGS GNSS tracking network from an almost purely European network to a truly global network between 2008 and now has had a significant impact on the quality of the GLONASS orbits and clocks. To show the effect on the quality of the GLONASS orbit estimates, we look at the difference between two independent consecutive solutions spanning 24 hours from 0 to 24 hours GPS Time. We compare the “midnight point” of both solutions, that is, the solution at the end of one day (or arc) and the beginning of the next day (or arc). This will give us a worst-case estimate for the orbit quality because typically the orbit is less accurate at the boundary of the orbital arc compared to the middle of the orbital arc. We have analyzed these orbit differences for all GPS and GLONASS satellites separately for four half-year time spans using the routine IGS GNSS solutions from ESOC. The differences are computed in three different satellite-orbit-related directions: radial, along-track, and cross-track. The times spans are:
January to June 2008 (6 months)
July to December 2008 (6 months)
January to June 2009 (6 months)
July to December 2009 (6 months)
The results are shown in Figure 6. For the GPS satellites, we cannot see any improvement over time. The quality of the GPS orbits is excellent at the 25- to 35-millimeter level for all three components.
Figure 6. Evolution of GPS and GLONASS orbit quality from January 2008 to December 2009.
Remember, we are looking at the worst-case differences here. For GLONASS, we can see a significant improvement over the four time spans. Early in 2008, the orbit quality was at the 120-millimeter level (cross-track), which has improved significantly to the 85-millimeter level. It is important to note that no processing changes were made during this time interval, and that the improvements are thanks to the improvements in the station tracking network and the GLONASS satellite constellation.
The clock quality is more difficult to assess, but over the timeframe of 2008 to 2009 we have noticed that the clock estimates of the GLONASS satellites have become complete. In 2008, with the still-far-from-global tracking network, there were many gaps in the tracking of the GLONASS satellites. This means that at some epochs no stations were tracking a GLONASS satellite. Such gaps cause jumps in the satellite clock estimates, because the carrier-phase observations become discontinuous, and these jumps are at the 1-meter (3-nanosecond) level. With the improvements of the IGS GNSS tracking network, the GLONASS tracking is now complete and clocks for all epochs are estimated. A comparison of the clocks of the two analysis centers that provide estimated clocks for the GLONASS satellites shows an agreement at the 80-picosecond level, which is only slightly worse than the agreement between the GPS clocks. Significant biases at the few-hundred-nanosecond level exist only in the GLONASS clocks because of receiver internal frequency-dependent delays. The ESOC GNSS orbit and clock products are, however, perfectly suited for precise point positioning using either GPS, GLONASS or, even better, both GNSS simultaneously. It should be noted that since February 2010, the ESOC IGS clock products are now sampled at 30 rather than 300 seconds, which further enhances their suitability.
Conclusions and Outlook
The IGS has promised to become a GNSS service by changing its name in 2005, more than four years ago. Meanwhile, the GLONASS satellite constellation as well as the IGS GNSS tracking network have matured and are practically complete. For the IGS to become a true GNSS service, a substantial number of the analysis centers should provide GNSS contributions to all IGS products: final, rapid, ultra-rapid, and real-time. These products should come from performing a rigorous combined analysis of the observations of all active GNSS satellites. It is expected that over the next two years, we will see a significant increase in the number of true GNSS solutions within the IGS, a very positive development for the GNSS world.
Within the IGS, the analysis centers CODE and ESOC are leading the GNSS efforts. CODE has provided fully consistent GPS/GLONASS products from a rigorously combined processing approach for all IGS products (final, rapid, and ultra-rapid) since May 2003, or for seven years. Since the beginning of 2008, ESOC has followed this good practice for its final products, and in February 2010 ESOC started to produce rapid and ultra-rapid GNSS products. A unique feature of the ESOC products is that they include the clocks for the GLONASS satellites, even with a sampling rate of 30 seconds for the final products. CODE will add GLONASS clocks to its IGS products very soon, during the fi
rst half of 2010. The GLONASS orbit and clock product quality has become comparable to that of the GPS products within the IGS. However, because GLONASS carrier-phase integer ambiguity resolution is difficult, the GLONASS products are and will remain somewhat less accurate than the GPS products.
The experiences gathered at CODE and ESOC by fully combining the observations from the GPS and GLONASS systems will pave the way for the integration of additional systems and signals within the IGS. Hence, IGS will retain its leading position in providing the reference, in the broadest sense of the word, for all GNSS. In the near future, this means the integration of QZSS and Galileo observations as well as the integration of the new triple-frequency signals from the latest generation of GPS satellites, Block IIF, the first of which was scheduled for launch last month.
The positive GNSS developments within the IGS will require an update of the IGS combination software to enable a true GNSS combination. The CODE and ESOC analysis centers have indicated that they are interested in taking on this important task of rewriting and enhancing the IGS orbit and clock combination software to make the IGS a true GNSS service.
Acknowledgments
CODE is a collaboration among the Astronomical Institute, University of Bern (Bern, Switzerland), the Swiss Federal Office for Topography (Wabern, Switzerland), the Bundesamt für Kartographie und Geodäsie (Frankfurt am Main, Germany), and the Institut für Astronomische und Physikalische Geodäsie of the Technische Universität München (Munich, Germany).
The authors are very grateful to the IGS and its numerous contributors for providing the global GNSS tracking data network.
TIM SPRINGER received his Ph.D. in physics from the Astronomical Institute of the University of Bern (AIUB) in 1999. He has been a key person in the development of the Center for Orbit Determination in Europe (CODE), one of the IGS analysis centers, located at AIUB. Since 2004, he has been working for the Navigation Support Office (OPS-GN) at the European Space Operations Centre (ESOC) of the European Space Agency (ESA) in Darmstadt, Germany. In this group, he has led the development of the new ESOC GNSS software, which is used for most GNSS activities at OPS-GN, including GIOVE-A and -B analyses.
ROLF DACH received his Ph.D. in geodesy at the Institut für Planetare Geodäsie of the University of Technology in Dresden, Germany. Since 1999, he has been working as a scientist at AIUB, where he is head of the GNSS research group. He oversees the development of the Bernese GPS Software, used at CODE for activities in the frame of the AIUB IGS analysis center and elsewhere.
“Renovated GLONASS: Improved Performances of GNSS Receivers” by A.E. Zinoviev, A.V. Veitsel, and D.A. Dolgin in Proceedings of ION GNSS 2009, the 22nd International Technical Meeting of the Satellite Division of The Institute of Navigation, Savannah, Georgia, September 22–25, 2009, pp. 3271–3277.
“Other Satellite Navigation Systems” by S. Feairheller and R. Clark, Chapter 11 in Understanding GPS: Principles and Applications, 2nd edition, edited by E.D. Kaplan and C.J. Hegarty, published by Artech House, Boston, 2006.
“GLONASS Performance, 1995–1997, and GPS-GLONASS Interoperability Issues” by G.L. Cook in Navigation, Vol. 44, No. 3, Fall 1997, pp. 291–300.
“GLONASS Review and Update” by R.B. Langley in GPS World, Vol. 8, No. 7, July 1997, pp. 46–51.
• The International GNSS Service
“The International GNSS Service in a Changing Landscape of Global Navigation Satellite Systems” by J.M. Dow, R.E. Neilan, and C. Rizos in Journal of Geodesy, Vol. 83, No. 3-4, March 2009, pp. 191–198, doi:10.1007/s00190-008-0300-3; erratum: Vol. 83, No. 7, July 2009, p. 689, doi: 10.1007/s00190-009-0315-4.
“GNSS Processing at CODE: Status Report” by R. Dach, E. Brockmann, S. Schaer, G. Beutler, M. Meindl, L. Prange, H. Bock, A. Jäggi, and L. Ostini in Journal of Geodesy, Vol. 83, No. 3-4, March 2009, pp. 353–365, doi:10.1007/s00190-008-0281-2.
IGS Central Bureau website. IGS FAQ, Site Guidelines, data and product access information, and network details are available: http://igscb.jpl.nasa.gov
• Benefits of Multi-GNSS
“The Benefits of Multi-constellation GNSS: Reaching up Even to Single Constellation GNSS Users” by B. Bonet, I. Alcantarilla, D. Flament, C. Rodriguez, and N. Zarraoa in Proceedings of ION GNSS 2009, the 22nd International Technical Meeting of the Satellite Division of The Institute of Navigation, Savannah, Georgia, September 22–25, 2009, pp. 1268–1280.
“Assessment of GPS/GLONASS RTK Under Various Operational Conditions” by R.B. Ong, M.G. Petovello, and G. Lachapelle in Proceedings of ION GNSS 2009, the 22nd International Technical Meeting of the Satellite Division of The Institute of Navigation, Savannah, Georgia, September 22–25, 2009, pp. 3297–3308.
“Anomalous Harmonics in the Spectra of GPS Position Estimates” by J. Ray, Z. Altamimi, X. Collilieux, and T. van Dam in GPS Solutions, Vol. 12, No. 1, January 2008, pp. 55–64, doi:10.1007/s10291-007-0067-7.