Simulator vendors explain their evolution in response to changes in GNSS/PNT, comment on technical challenges they face, and outline principal markets.
GNSS receivers — which were never as simple as FM radio receivers or garage door remote controls — are becoming increasingly complex. The causes for this include continuing efforts to:
- reduce their size, weight, and power (SWAP)
- utilize new signals from up to four GNSS constellations
- integrate them with other sensors, such as inertial measurement units (IMUs), cameras, and lidars
- take advantage of a growing number of public and private, global, regional, and local correction services
- meet the requirements of booming new markets, such as autonomous vehicles
- mitigate the threats posed by the proliferation of unintentional and intentional RF interference, the latter better known as jamming, and by spoofing.
In short, receiver manufacturers must constantly adapt to a GNSS/PNT landscape that is, as one of the respondents to this Q&A put it, “ever evolving.”
In turn, the growing complexity of GNSS receivers requires increasingly sophisticated simulators to test receivers and their integrations in controlled conditions before field testing and deployment. Increasingly, this is achieved by replacing with software what was once done in hardware. Simulation remains a vital, though often underappreciated, segment of our industry.
On the following pages, five simulator vendors briefly explain their evolution in response to changes in GNSS/PNT, comment on the principal technical challenges they face, and outline their principal markets.


Product Line Director, Simulation
Orolia
OROLIA
How has your approach to simulation changed over the years and in response to what changes in GNSS/PNT?
We have transitioned away from the GNSS simulator approach of using fixed, allocated hardware that we used in our early simulators to the more modern software-defined approach we use today. Given the ever-evolving PNT landscape, it is difficult to design hardware that will support all future GNSS and PNT simulation needs. Instead, we focus on the development of the Skydel software platform, which can then be used with the supported COTS hardware or turnkey system to generate the necessary signals. This gives us the benefit of maximum scalability and flexibility while being truly future proof.
The software-defined approach also allows us to offer Skydel in new and exciting ways. We aim to make PNT simulation accessible to everyone and we can do that through subscription and cloud-based simulation services.
What are currently the greatest technical challenges to GNSS/PNT simulation?
Today GNSS is only a part of the PNT picture. GNSS receivers are often tightly integrated with other sensors and many times the GNSS receiver cannot be isolated to test it on its own. Other sensors must also be stimulated or simulated and included as part of testing. Correction services are becoming more common, but many are proprietary with no public specification. With no common standards available, it can be technically challenging to create a one-size-fits-all test solution.
We tackle these challenges through our plug-in feature. The plug-in architecture allows you to expand the capabilities of Skydel by adding your own features or complex integration with other systems. It allows you to exchange information with the Skydel Engine and even integrates it into the Skydel UI. With our open-source SDK, which includes example plug-ins, you can create your data outputs synchronized to the GNSS simulation, such as IMU or correction services data.
In what markets and applications are your simulators used? Are they used only in labs or also in the field?
At Orolia, we say ‘Skydel Everywhere.’ Skydel is used in applications ranging from military encrypted receiver testing (SAASM, M-Code, PRS) to commercial applications supporting any of the GNSS signals available.
Skydel is used in systems that are found in labs, but you can also find Skydel at an individual engineer’s desk, or even home offices. In the field, Skydel has provided simulation and threat generation capability to authorized test ranges and field test events.

RACELOGIC

Managing Director
Racelogic
How has your approach to simulation changed over the years and in response to what changes in GNSS/PNT?
Over the years, GNSS technology has changed significantly but our approach of identifying a need and creating a solution hasn’t changed since we launched our first LabSat GNSS simulator. We created LabSat because we needed a cost-effective, accurate and easy to use record and replay simulator that we could use for product development and production line testing for our VBOX Automotive and VBOX Motorsport technologies. This need could not be met by any other simulator manufacturer, so we developed our own solution, which in turn became LabSat. Although our approach has not changed, the needs of users, including our own engineers, have, so we continue to develop and improve LabSat to meet these needs.

With the increasing number of satellite launches in market segments such as communication and navigation, the number of requests for testing space-qualified receivers has increased dramatically. To test these kinds of scenarios, we have been making some major upgrades to simulate rocket launches and Earth orbit trajectories that require very different characteristics from land-based simulation.
As the number of constellations and signals has expanded very rapidly, the number of simultaneous signals that need to be simulated has put a far greater requirement on the computing power needed to render them. We have been working very hard on optimizing our routines to make the most of the new breed of high-performance multi-core processors. The result has been a big decrease in the time taken to create a scenario, and an increase in the number of signals that can be simulated in real-time.
What are currently the greatest technical challenges to GNSS/PNT simulation?
The biggest challenge is in simulating a large number of constellations and signals in real-time without using dedicated, expensive hardware to create them. The good news is that with the latest Intel Xeon processors boasting up to 40 cores and 80 threads, a much larger number of signals can now be created in real-time using off-the-shelf PC components.
In what markets and applications are your simulators used? Are they used only in labs or also in the field?
With the global pandemic causing national lockdowns, many engineers switched to working from home. Our largest growth in the simulator market has therefore been due to providing these engineers with a small, low cost, easy to use simulator that they can have on their desks at home, allowing them to continue to develop GNSS applications without having to go into the office. The markets these engineers work within are as varied as the markets that use GNSS technology.
We have also seen a big increase in the use of our simulators to test mass produced satellites used in providing global internet coverage. These satellites are being produced in large volumes, and the need for a low cost, reliable testing method on the production line has driven strong growth in this area.
Our simulators are often used in the field to gather data for in-lab testing, as small size and battery life are very important factors in this environment.
SPIRENT FEDERAL SYSTEMS

Senior Systems Engineer
How has your approach to simulation changed over the years and in response to what changes in GNSS/PNT?
Spirent has provided highly accurate simulation solutions since the early phases of GPS availability, starting with defined hardware for each signal type. As the GNSS landscape has grown, Spirent has worked closely with leading developers, adding key flexibility and functionality to adapt and provide a growing product portfolio. By adopting a robustly defined system architecture, and employing signal-agnostic hardware, Spirent simulators can generate any of the available constellations and frequencies, with no more than a few clicks of a mouse.
While broadening the support for the increasing number of constellations has been a focus, so too has the necessity to provide users with high numbers of available channels and auxiliary simulation needs. To complement GNSS simulation, significant effort is being devoted to resilient application testing, providing users with flexible solutions for introducing jamming and spoofing to the test environment. Our agnostic hardware supports signal generation using software defined radio (SDR), including interference sources and user-defined IQ signal data. As customer demands have grown, alternative RF and PNT sensors have been—and continue to be—incorporated, allowing users an expanded and comprehensive test environment.

What are currently the greatest technical challenges to GNSS/PNT simulation?
Today, nearly all industries rely on GNSS or other PNT sources to some extent. With such varied and widespread use, laboratory testing is critical, and maintaining the highest levels of accuracy, reliability and robustness remains one of the greatest challenges. For modern hardware-in-the-loop configurations, simulation systems must be able to keep latency consistent to enable powerful post-processing of results. With this challenge in mind, we at Spirent design and manufacture our own hardware, ensuring precision and ultra-low latency.
Another significant test challenge posed by modern applications is the growth in vehicle speed and maneuverability. Creating a truly realistic test environment for supersonic and even hypersonic vehicles with high rates of spin and jerk places huge demands on a simulator. Spirent recently has introduced the industry’s first 2 kHz update rate, enabling the most accurate trajectories for the most mobile technologies.
Lastly, positioning engines are becoming more complex. In addition to GNSS and inertial, vision systems and a range of other sensors and signals-of-opportunity are providing developers greater opportunity for precision and robustness. Therefore, a core part of Spirent’s mission statement is delivering test equipment that is designed to be integrated into wider test benches and ensuring that equipment is always orders of magnitude more accurate than any device under test.
In what markets and applications are your simulators used? Are they used only in labs or also in the field?
Spirent simulators are used in all phases of the product life cycle across nearly all applications. Receiver manufacturers use our solutions beginning with initial research and development, throughout product development, and well into production and field testing. Along with the ability to use Spirent’s simulators for live range testing, Spirent’s GSS6450 record and playback system enables users to record the real world in high dynamic detail for repeatable lab testing.
JACKSON LABS

President and CTO
How has your approach to simulation changed over the years and in response to what changes in GNSS/PNT?
Initially, we saw a large demand for GPS-only solutions. We are shipping units into this market and it is growing more than 30% year over year for us. Recently, customers are looking to also supporting other constellations. There is an emerging market for LEO simulation capability. Many LEO constellations are becoming reality, such as OneWeb, Kuiper, Starlink, Iridium, Xona, and others, and customers are more frequently asking if we can support these types of signals in our simulators. Demand also is arising for additional base-band signals to accommodate the RF signals, such as synchronized raw IMU data and other observables. Jamming and spoofing signals also are being requested and reproducing these as faithfully as possible is a big challenge for synthesized simulation. Lastly, we see demand rising for mil-type secure applications, such as M-Code, PRS (Galileo) and P(Y) code SAASM of course. The complexity of future simulators will rise in lockstep with the complexity of the RF spectrum coming to us from space.
What are currently the greatest technical challenges to GNSS/PNT simulation?
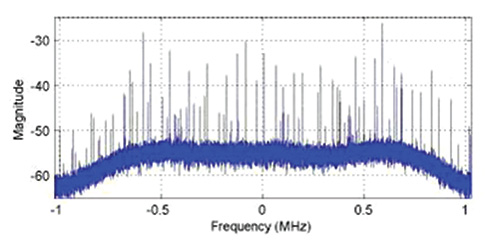
A faithful reproduction of the real live-sky RF signals would rank high on this list. There are almost an unlimited number of out-of-band and in-band benign and adversary RF signals on a typical GNSS antenna these days, and more recently the sun has been acting up with solar flare activity that can disrupt GNSS signals. As GNSS receivers mature and become capable of tracking four, five or more carrier frequencies and constellations at once it becomes increasingly challenging to supply these types of signals from a simulator, and at a reasonable price-point. Sometimes, a wideband recording and playback system can do a better job at reproducing live-sky signals, however these systems are limited to playing back the same exact mission over and over again of course, and thus are not very flexible.
In what markets and applications are your simulators used? Are they used only in labs or also in the field?
Our simulators are built for two different applications: the first is a traditional type of GPS signal simulation where a Windows application allows a user to set up static or dynamic scenarios, allows them to upload NMEA playback files, create jamming or spoofing signals, and generally tweak the RF signal in many ways, such as modifying power levels and antenna patterns and even creating space vehicle failures in real time. Our customers range from car, aircraft, and avionics manufacturers, to R&D labs, to the government and academia.
Our simulators also are used for a hardware-in-the-loop application that we call transcoding. It allows glueless retrofitting of existing GPS equipment with any and all the emerging PNT solutions such as LEO positioning and timing, celestial navigation, INS/IMU, CSAC holdover, and concurrent/multi-frequency GNSS using a 1×1-in. transcoder module. Our transcoders fly on Air Force aircraft, are used to retrofit telecom equipment, and allow deep-indoors and underground GPS reception. Transcoders created an entirely new market for simulators.
SYNTONY GNSS

GNSS Simulators R&D Teams
How has your approach to simulation changed over the years and in response to what changes in GNSS/PNT?
Manufacturers of GNSS receivers are targeting more precision and availability, especially in urban areas, which require acquiring more signals from more constellations and greater effort to minimize multipath errors. This confirms that an SDR design for signal generation is decisive to keep systems cost-efficient, as it directly benefits from Moore’s law. For instance, our new RTGS4-12 configuration is about four times more powerful (240 channels) than our previous standard configuration, for a similar budget level.
Regarding precision and RF quality, our simulators benefit from the same RF cards as Echo, our high-fidelity record and playback equipment, with a state-of-the-art RF front end: three channels at a 100 MHz sampling rate and a 16 bit IQ. The capacity to simulate protected signals is also crucial: with PRN Link, Constellator is ready for any present or future signal with encrypted spreading codes.
What are currently the greatest technical challenges to GNSS/PNT simulation?
Building a CRPA simulator is not an easy task, as this requires extreme levels of phase and time synchronization between several RF outputs, typically four, seven or more. This can be done in two ways: with a dedicated new RF board running with a single synthesizer for all channels or using the classical one, to which one should add a complex calibration mechanism. SYNTONY has made the tough choice, investing more at first in a mono-synthesizer version. However, this will benefit our customers, for which the usage will be simplified and it will save them a lot of time by shortening the calibration phase. This version already is available for sale.

On another note, it is a significant challenge to keep our product and its interfaces user friendly while also enabling our clients to configure each of the more than 500 parameters available (at the last count). We also keep in mind that new signals may appear, from LEO constellations for instance, answering to new needs such as autonomous driving. Constellator is HW ready for them, only requiring a software update.
In what markets and applications are your simulators used? Are they used only in labs or also in the field?
Constellator currently is mainly used in laboratories, in many market segments. Because it was initially built in partnership with spacecraft manufacturers, it benefits from the high standards of performance of space industries and includes several advanced space-dedicated features.
On top of the typical usage inside the labs, two other SYNTONY simulator products that are directly derived from Constellator are used in the field:
- ECHO Recorder & Playback is used to record the GNSS environment with ultra-high fidelity: today @ 100Mhz, and before the end of 2021 even up to @ 200Mhz. ECHO has been used by our customers in cars, trains and often in aircraft test flights. Another usage of ECHO is to detect and record scintillation phenomena, as we will soon do in Brazil.
- SubWAVE (GNSS coverage extension for underground places) allows indoor positioning with precision, directly compatible with standard GPS receivers, which can be crucial for safety or operational reasons. We have installed SubWAVE inside subways stations and tunnels (for example, in Stockholm, Paris and New York), in road tunnels (soon in France, in the “Tunnel du Mont Blanc”), in an underground bus terminal (also in Stockholm), in underground train stations (in Switzerland), and before the end of 2021 also in an underground mine (in Finland).