GNSS integrity is key to precision agriculture. (Image: fotokostic/iStock/Getty Images Plus/Getty Images)
In the world of global navigation satellite systems (GNSS), there are five key watchwords: accuracy, integrity, availability, continuity and coverage. While all five of those parameters are very important, their priority order depends on the application.
Accuracy: how well a measured or estimated position or time conforms with its true value. If you are a surveyor, accuracy and integrity are your biggest concerns. Accuracy is not to be confused with precision, which is a measure of exactness. It can refer to the number of significant digits reported for a measurement, the rigor of the measuring process, or the agreement among repeated measurements. For example, for locational error a measurement of 9.725m is more precise than 9.7m but may not be a more accurate measure of the error. A measuring instrument is precise if it repeatedly gives similar measurements, regardless of whether these are actually accurate. They could all be off by, say, 5m, due to some bias in the measurement process. In short, precise data may be inaccurate and accurate data may be imprecise.
Integrity: how much the information supplied by the system can be trusted to be correct. This requires the system to provide timely warnings to the user when the equipment is unreliable for navigation purposes—due to obstructions, jamming, multipath or any other event that degrades accuracy.
Availability: the percentage of time that a signal is available to the user. For location-based services, this and coverage are probably the most important parameters.
Continuity: the ability of the total navigation system to continue to perform its function during the intended operation. Continuity is critical whenever reliance on a particular system is high. For a pilot during an instrument approach procedure, continuity and integrity are vital.
Coverage: the area over which a signal is required. For farmers, it is their fields, for ships, the world’s oceans.
Viavi Solutions has unveiled the PNT-6200 Series Assured Reference for resilient positioning, navigation and timing (PNT). Viavi acquired Jackson Labs Technologies in November 2022.
The PNT-6200 Series Assured Reference provides resiliency and robust cybersecurity for critical infrastructure.
The compact system can supplement or replace GPS signals based on connectivity to the broadcast range of timing sources in the market including other GNSS satellites, and commercial satellite, terrestrial, wireline, and atomic clock services. The PNT-6200 Series will draw the timing signal from the most reliable source and use it as a replacement for the GPS input, enabling continuous operation.
The PNT-6200 Series will be showcased at Mobile World Congress in Barcelona, Feb. 27-March 2.
Autonomous vehicles require lane-level accuracy at all times and in all conditions. However, under many conditions, such as in urban canyons and tunnels, they may lose line-of-sight to enough GNSS satellites to achieve accurate and robust positioning or may have no signal at all. In these situations, they need data from other sensors, including an odometer and an inertial measurement unit (IMU). Creating reliable and safe autonomous navigation requires fusing GNSS and inertial technology in a multi-layered system.
SBG Systems and its partners LeoDrive.ai and Intempora, have been doing this to develop solutions for autonomous vehicles. SBG’s technology enables multi-sensor integration while addressing such autonomous navigation challenges as time synchronization, integrity, precise positioning and high-definition mapping.
“To ensure performance and build trust, we assemble our own IMUs from carefully selected industrial-grade parts, then we calibrate all our products individually,” said Laurent Le Thuant, business manager for SBG, in a recent webinar.
For safe operation, Le Thuant explained, the vehicle’s true positional error (PE) must be smaller than its protection level (PL), which in turn must be smaller than its alert limit (AL): PE < PL < AL. Otherwise, the solution is declared unavailable or reports misleading information.
In automotive tests conducted in a business district near Paris, an SBG vehicle was equipped with both a GNSS-only, automotive-grade multiband RTK receiver equipped with a PL determination algorithm and an RTK GNSS receiver tightly-coupled with an IMU and an odometry input. A comparison showed that the former was not suited for self-driving, while the latter significantly improved the solution availability, accuracy and protection levels.
For self-driving in the most severe conditions, even this solution requires integration of supplementary sensors, such as cameras, lidars and radars for precise localization.
By R. Eric Phelts, Kazuma Gunning, Juan Blanch and Todd Walter
Innovation Insights with Richard Langley
AS WE NOTED IN THE LAST INNOVATION COLUMN, integrity — at least from a safety viewpoint — is the most important characteristic of a navigation system. Yes, accuracy, availability and continuity are also required but, without integrity, the advertised accuracy of a system might become meaningless and perhaps misleading. While GPS and user receivers are highly reliable, we cannot presume that there will never be an erroneous signal transmitted by a GPS satellite that would result in a receiver outputting a hazardously misleading position solution. While “supervisory” systems such as satellite-based augmentation systems monitor GPS signals and can alert users about defective satellites within a very short period of time, it is advantageous for a user receiver to autonomously detect problematic satellites and quarantine them so that they do not perturb the position solution.
It is for this reason that receiver autonomous integrity monitoring (RAIM) techniques were developed. As we know, a receiver needs signals from a minimum of four satellites simultaneously to determine its 3D position and its clock offset. However, typically there are more than four satellites in view, and so multiple solutions using subsets of four satellites are possible. If five satellites are visible, then it is possible to determine that one of them is faulty, but not which one (geometry plays a role here). This is called fault detection (FD). And if six satellites are visible, the faulty satellite can be determined and then excluded from the position solution (fault detection and exclusion, or FDE). This is the basic principle of RAIM.
Advanced RAIM (ARAIM) extends RAIM to other constellations beyond GPS. ARAIM enables the use of the newer GNSS constellations to provide better levels of performance than RAIM with GPS alone. It also uses dual-frequency measurements for enhanced vertical positioning reliability.
Central to positioning techniques providing a safety-of-life service is the notion that the uncertainty of a provided position must be conservatively estimated and provide for both nominal uncertainty and the uncertainty of a faulted solution such as that detected using RAIM. These conservative estimates are known as the horizontal and vertical protection levels. The horizontal protection level (HPL) is the radius of a circle in the horizontal plane with its center at the true position, which describes the region that is assured to contain or bound the provided horizontal position to a very high probability. The vertical protection level is half the length of a segment in the vertical direction with its center at the true position, which describes the region that is assured to contain or bound the provided vertical position to a very high probability. The probability levels are typically taken to be 99.9999998 and 99.99999% for HPL and VPL, respectively.
The usual approach for RAIM and ARAIM is to use the so-called “snapshot” approach, where measurements are assumed to be uncorrelated epoch to epoch. In this month’s column, a team of authors from Stanford University discusses a superior approach for ARAIM using the technique of precise point positioning.
Advanced Receiver Autonomous Integrity Monitoring (ARAIM) is implemented using solution separation in positioning and navigation software. Solution separation computations presume one or more GNSS satellites may be faulty, and they iteratively compute multiple position solutions comprised of subsets of the n satellites in view (n, n-1, n-2, and so on) to ensure that at least one of the solutions is fault-free. Using assumptions on the nominal and faulted uncertainty of the solutions, the software can compute conservative horizontal and vertical protection levels (PLs) by bounding the uncertainty from all the solutions. This assures (to a targeted level of probability) that the user position is contained within these limits.
Traditional solution separation techniques generally operate as a “snapshot.” The basic measurements are dual-frequency, carrier-smoothed pseudorange (code), and errors are generally assumed to be uncorrelated from epoch to epoch. This procedure requires that errors at each time step are conservatively bounded with large uncertainties (sigmas) designed to protect the user against the worst-case error. These assumptions minimize the complexity and computational cost of the solution by providing a robust, provably safe bound. However, the PLs computed are relatively large. In addition, they can change suddenly from one epoch to the next due to changes in available satellites or platform dynamics. This can make meeting performance goals (such as continuity) for aircraft approaches more challenging.
Solution separation procedures using techniques based on precise point positioning (PPP) implement an extended Kalman filter (EKF) to filter measurements over time. In this case, the basic measurements are dual-frequency code and carrier phase, and errors are assumed to have some correlation between each time step to the next. Accordingly, these techniques leverage higher quality measurements (that is, carrier-phase-based as opposed to code-based) to smooth and reduce large sigmas and to estimate (and calibrate) errors over time. The complexity associated with defining and characterizing the decorrelation models for the errors, so that the nominal covariance produced by the EKF conservatively describes the actual error, is significant. Also, the computational cost of estimating the error states may be substantially higher than with the traditional snapshot approach. However, the computed protection levels provide integrity and are often significantly smaller. In addition, the filtering makes them more robust to platform dynamics, which makes them well-suited for aircraft in flight.
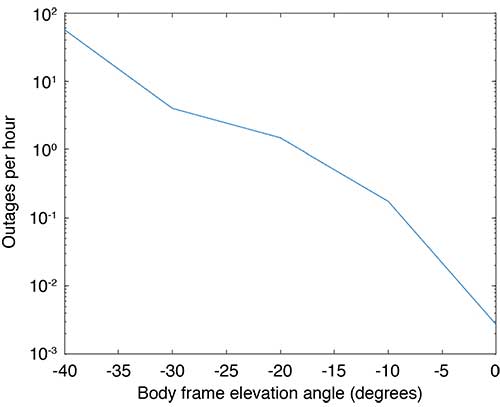
Flight Data: Outages and Cycle Slips. ARAIM performance may be significantly affected by aircraft dynamics. Specifically, banking can induce satellite outages and cycle slips. Outages weaken the constellation geometry and can cause sudden changes in the protection level. Frequent cycle slips prevent code measurements from being smoothed, potentially inflating protection levels of carrier-phase-smoothed code measurements for extended periods of time.
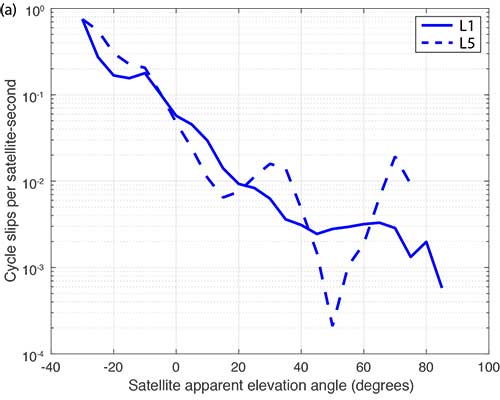
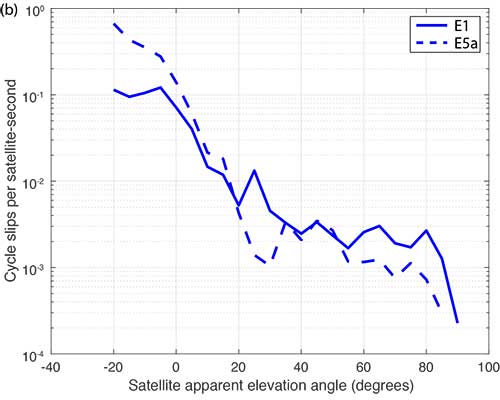
When the outages and cycle slips are computed as a rate, a trend can be seen. Both increase notably as the relative elevation angle to the satellites decrease. FIGURE 1 shows an example of outages as a function of the apparent elevation angle of the satellites (relative to the aircraft). Cycle slips on GPS L1-L5 and Galileo El-E5a are plotted in FIGURES 2 (a) and (b), respectively.
FIGURE 1. Outages as a function of body frame or apparent elevation angle during aircraft banking. (Image: Authors)FIGURE 2a. Cycle-slip rate (per satellite-second) for GPS L1-L5. (Image: Authors)FIGURE 2b. Cycle-slip rate (per satellite-second) for E1-E5a. (Image: Authors)
For this article, we have used the flight data from one of our earlier papers on the effect of aircraft banking on ARAIM performance (see Further Reading). With this data, we show that significant advantages of PPP can be retained even during aircraft maneuvers when outages and cycle slips threaten ARAIM continuity and availability the most.
MODEL ASSUMPTIONS
The traditional snapshot solution separation approach is well-established and was implemented according to the standards established by a working group operating under the U.S.-European Union Agreement on GPS-Galileo Cooperation, which has been extended to all constellations (see Further Reading). For this article, we limited the constellations to GPS and Galileo, and the prior probabilities assumed for satellite and constellation faults were as follows:
Psat = 10-5, Pconst,GPS = 10-8 and Pconst,GAL = 10-4
We implemented the PPP algorithm with solution separation using an EKF using dual-frequency code and carrier-phase measurements (from GPS and Galileo) with estimated parameters comprising the receiver position and velocity, clock biases for each constellation in use, a residual tropospheric delay, carrier-phase float ambiguities for each tracked carrier, multipath error, receiver differential code bias, and broadcast orbit and clock error. Modeled (not estimated) effects include solid Earth tide modeling, ocean loading, an initial tropospheric delay and relativistic effects. Many of the details of the implementation can be found in our paper “Design and Evaluation of Integrity Algorithms for PPP in Kinematic Applications” (see Further Reading).
PPP techniques typically utilize precise ephemeris information obtained from a global network of ground reference stations such as those operating in the network coordinated by the International GNSS Service. Snapshot solution separation techniques, however, use only ephemeris information broadcast from the satellites themselves. For a proper comparison of the protection levels computed by each technique, the PPP filter was constrained to use this broadcast information.
The model we have applied is mostly typical of a traditional PPP implementation with one significant exception — the state tracking the error contribution of the broadcast orbit and clock on each line-of-sight signal. The error contributed by the broadcast orbit and clock is handled by the filter leveraging a characterization of the rate of change of the error, then including it as an estimation state for each line of sight and only adding enough process noise to capture the slowly changing error. We have previously characterized the rate of change of the error in the broadcast orbit and clock and process noise (for GPS). Complete tables of initial state uncertainties and additional settings for process and measurement noise were provided in our earlier work (see Further Reading).
RESULTS
Flight data collected over a period of approximately one year was used to evaluate ARAIM performance through momentary outages and cycle slips due to aircraft dynamics. A multi-constellation, multi-frequency receiver tracked GPS (L1 C/A and L5) and Galileo (E1 and E5a) satellites. This receiver is installed in a Global 5000 jet owned and operated by the FAA William J. Hughes Technical Center. It records and stores GNSS measurements whenever flights are taken. The data we used for this article included data recorded over approximately 35 flights from September 2017 to April 2018.
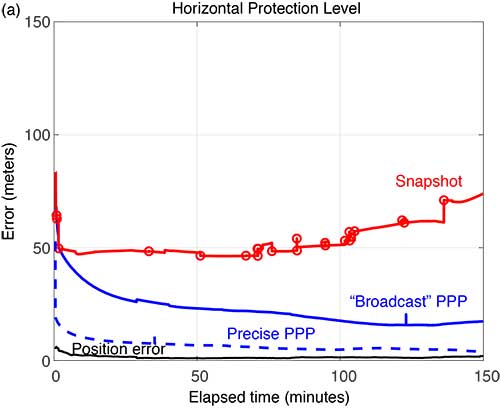
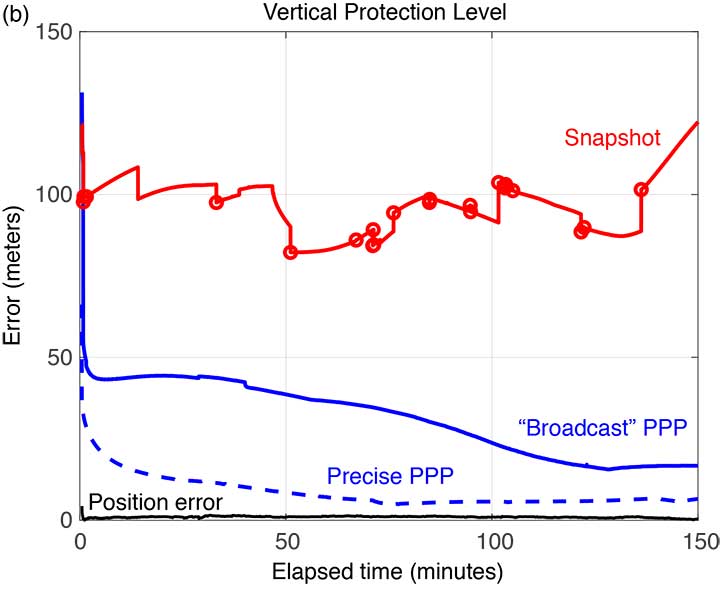
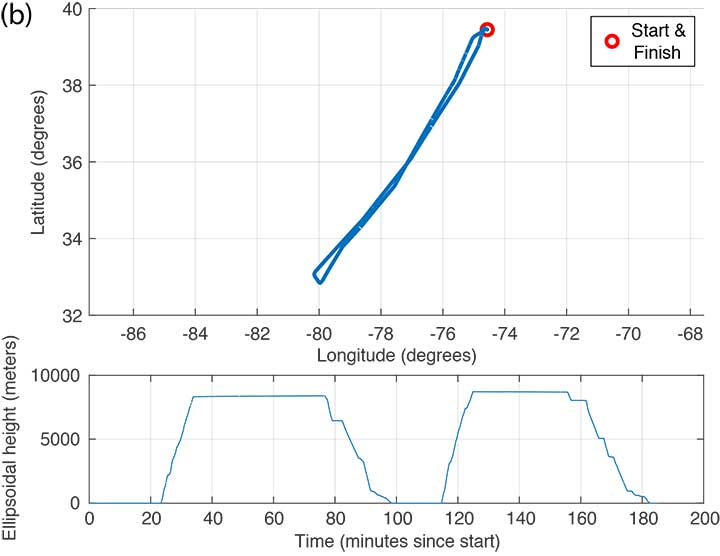
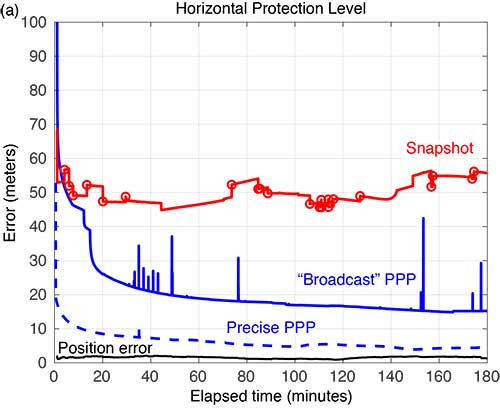
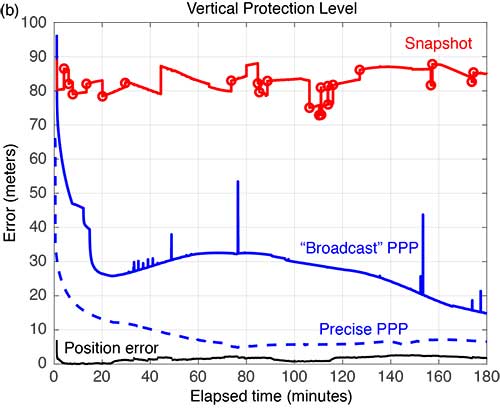
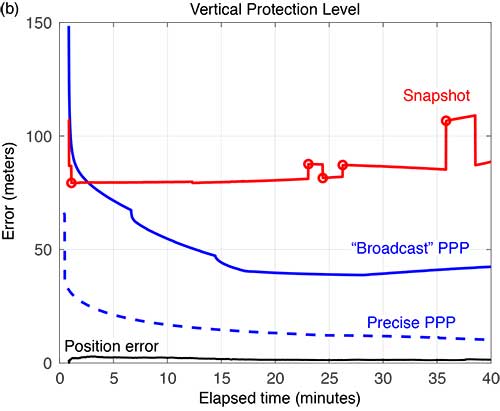
FIGURE 3 shows the trajectory and altitude information corresponding to a single flight (Flight #6) taken on Sept. 20, 2017, and FIGURE 4 compares the corresponding horizontal and vertical protection levels computed using snapshot and “broadcast” PPP techniques. For an additional reference, we also computed protection levels using PPP with precise orbits and clocks (we call this precise PPP despite the terminology redundancy) and plotted these in Figure 4, too.
FIGURE 3b. Altitude information for Flight #6 (Sept. 20, 2017). (Image: Authors)FIGURE 4a. Horizontal protection levels for Flight #6 (Sept. 20, 2017); red circles indicate a satellite being dropped or reentering the solution. (Image: Authors)FIGURE 4b. Vertical protection levels for Flight #6 (Sept. 20, 2017); red circles indicate a satellite being dropped or reentering the solution. (Image: Authors)
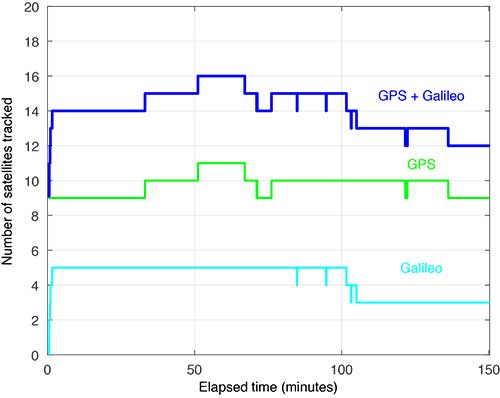
Several things are readily apparent from these comparisons. First, after the initial time required for convergence, there is a substantial reduction in the PLs using the broadcast-PPP-based approach. The precise PPP PLs, as expected, produce the largest reduction, but use additional information not available to the snapshot method. In addition, the snapshot solution separation PLs vary significantly due to cycle slips and momentary satellite outages. FIGURE 5 shows the number of satellites tracked by the receiver during this flight; red circles plotted on the snapshot protection-level line indicate when satellites are coming into and out of view. Despite numerous abrupt changes in number of measurements and measurement quality, the EKF of the PPP techniques produces PLs that are relatively smooth and continuous.
FIGURE 5. Number of satellites tracked for Flight #6 (Sept. 20, 2017). (Image: Authors)
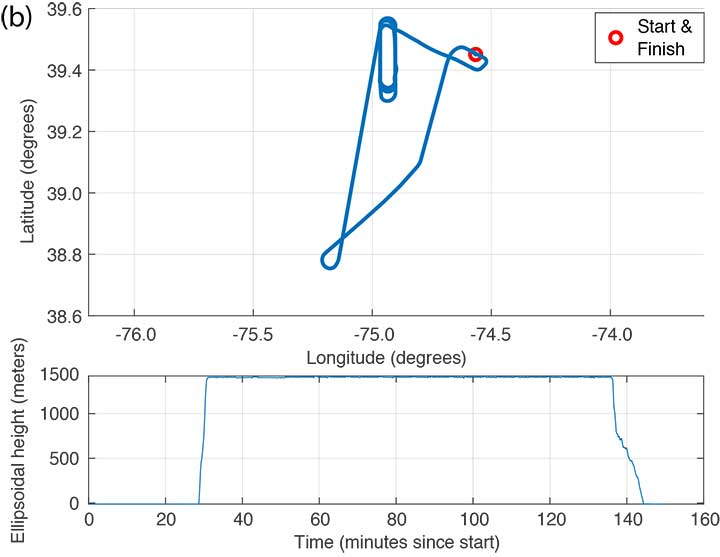
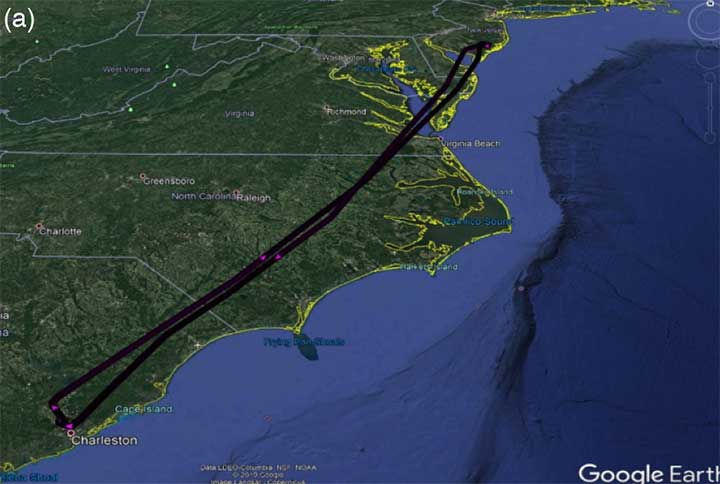
FIGURE 6 shows the trajectory and altitude information corresponding to Flight #4 taken on Sept. 15, 2017.
FIGURE 6a. Flight path for Flight #4 (Sept. 20, 2017). (Image: Authors)FIGURE 6b. Altitude information for Flight #4 (Sept. 20, 2017). (Image: Authors)
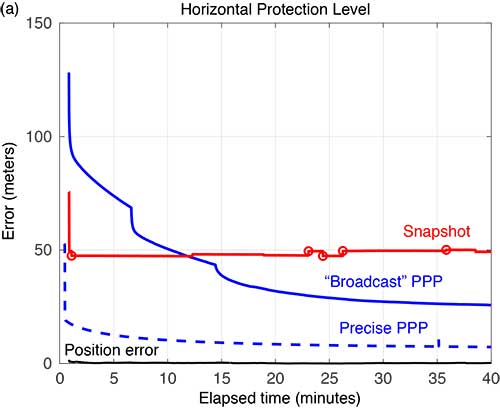
FIGURE 7 compares the horizontal and vertical PLs for snapshot solution separation and the PPP-based techniques.
FIGURE 7. Horizontal protection levels for Flight #4 (Sept. 15, 2017); red circles indicate a satellite being dropped or reentering the solution. (Image: Authors)FIGURE 7b. Vertical protection levels for Flight #4 (Sept. 15, 2017); red circles indicate a satellite being dropped or reentering the solution.
As in the case shown in Figure 4, the PLs in Figure 7 reveal a substantial reduction in the mean PLs computed using the PPP-based approach. And the snapshot solution separation approach displays even more variations due to momentary satellite outages. Some of the cycle slips affected enough satellites to introduce brief spikes in the PPP solution as well. These reconverge quickly, but they suggest that some tuning of the EKF can still be done to mitigate these interruptions. Still, the filtered approach produces PLs that are more robust to the outages and are substantially smaller than with the snapshot method.
FIGURE 8 compares the horizontal and vertical PLs computed using snapshot solution separation and PPP techniques for Flight #20 — where the airplane remained stationary on the runway. In the absence of flight dynamics, the levels for all the approaches were relatively smooth. However, a few discontinuities can still be observed for the snapshot case. Also note, in the case of the broadcast PPP, the convergence time is noticeably longer. This is likely because the integer ambiguity resolution in the solution took longer to converge without platform motion.
FIGURE 8a. Horizonta protection levels for a stationary aircraft (Flight #20, Dec. 4, 2017); red circles indicate a satellite being dropped or reentering the solution. (Image: Authors)FIGURE 8b. Vertical protection levels for a stationary aircraft (Flight #20, Dec. 4, 2017); red circles indicate a satellite being dropped or reentering the solution. (Image: Authors)
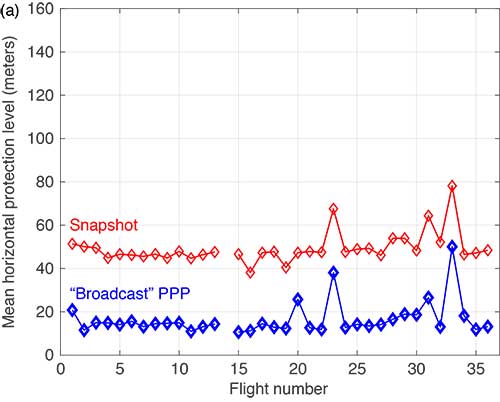
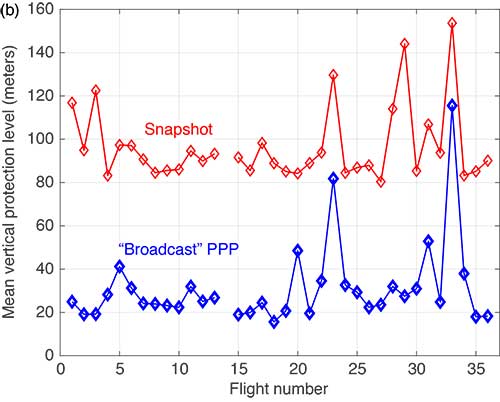
The mean horizontal and vertical PLs for both techniques are summarized in FIGURE 9. (There were issues with the data from Flight #14 and it was not processed.) The PPP approach consistently produces protection levels anywhere from 30 to 75% smaller than those computed using the snapshot approach. The mean PLs for the PPP techniques were always below those computed with the snapshot method.
FIGURE 9a. Comparison of mean horizontal PLs for “snapshot” vs. a PPP-based technique. (Image: Authors)FIGURE 9b. Comparison of mean vertical PLs for “snapshot” vs. a PPP-based technique. (Image: Authors)
CONCLUSIONS
Data from 35 flights was used to compare ARAIM protection levels computed by the traditional “snapshot” solution separation versus a PPP-based approach during both in-flight and several static scenarios. We observed that the filtering of PPP methods yields mean PLs approximately 30 to 75% of those computed using traditional methods in all cases. This improvement can be attributed to exploiting — through filtering and estimation — carrier-phase-based measurements and a time-correlation of the errors. In addition, the EKF employed by the PPP approach demonstrated improved robustness to outages and cycle slips induced by aircraft dynamics. Despite the increased complexity and computational cost, we believe that PPP approaches hold promise for significantly improving ARAIM performance.
ACKNOWLEDGMENT
This article is based on the paper “Evaluating the Application of PPP Techniques to ARAIM Using Flight Data” presented at ION ITM 2020, the 2020 International Technical Meeting of The Institute of Navigation, San Diego, California, Jan. 21–25, 2020.
MANUFACTURER
The flight data was recorded using a Trimble BX935-INS receiver fed by an Antcom Avionic II GNSS antenna.
R. ERIC PHELTS is a research associate in the Department of Aeronautics and Astronautics at Stanford University, California. He received a Ph.D. in mechanical engineering from Stanford University in 2001. His research involves signal deformation monitoring for SBAS and flight-data analyses for ARAIM.
KAZUMA (KAZ) GUNNING is a Ph.D. candidate in the GPS Laboratory at Stanford University working under the guidance of Todd Walter. He is also the navigation algorithms and architecture lead at Xona Space Systems in San Mateo, California. His research interests are in precise point positioning and integrity.
JUAN BLANCH is a senior research engineer at Stanford University, where he works on integrity monitoring algorithms for radionavigation. He received a Ph.D. in aeronautics and astronautics from Stanford University in 2003. He has received The Institute of Navigation (ION) Parkinson and Early Achievement awards.
TODD WALTER is a research professor in the Department of Aeronautics and Astronautics at Stanford University. He received his Ph.D. in applied physics from Stanford University in 1993. His research focuses on implementing high-integrity air navigation systems. He has received the ION Thurlow and Johannes Kepler awards. Walter is also a Fellow of the ION and has served as its president.
“A Baseline RAIM Scheme and a Note on the Equivalence of Three RAIM Methods” by R.G. Brown in Navigation, Vol. 39, No. 3, Fall 1992, pp. 301–316.
Advanced Receiver Autonomous Integrity Monitoring
“SBAS Corrections for PPP Integrity with Solution Separation” by K. Gunning, J. Blanch and T. in Proceedings of ITM 2019, the 2019 International Technical Meeting of The Institute of Navigation, Reston, Virginia, Jan. 28–31, 2019, pp. 707–719.
“Design and Evaluation of Integrity Algorithms for PPP in Kinematic Applications” by K. Gunning, J. Blanch, T. Walter, L. de Groot and L. Norman in Proceedings of ION GNSS+ 2018, the 31st International Technical Meeting of the Satellite Division of The Institute of Navigation, Miami, Florida, Sept. 24–28, 2018, pp. 1910–1939.
“Effect of Aircraft Banking on ARAIM Performance” by R.E. Phelts, J. Blanch, K. Gunning, T. Walter and P. Enge in Proceedings of ION GNSS+ 2018, the 31st International Technical Meeting of the Satellite Division of The Institute of Navigation, Miami, Florida, Sept. 24–28, 2018, pp. 2632–2641.
“Precise Point Positioning” by J. Kouba, F. Lahaye and P. Tétreault, Chapter 25 in Springer Handbook of Global Navigation Satellite Systems, edited by P.J.G. Teunissen and O. Montenbruck, published by Springer International Publishing AG, Cham, Switzerland, 2017.
The UK’s emergency service responders and other critical services could be set for more resilient time systems through the National Timing Centre.
The United Kingdom has established a new timing center to reduce reliance of public services and its economy on GNSS satellites. The center uses a network of atomic clocks housed at secure locations, and consists of a team of researchers based at sites across the U.K.
The National Timing Centre will provide additional resilience for accurate timing, which underpins many everyday technologies including emergency response systems, 4G/5G mobile networks, communication and broadcast systems, transport, the stock exchange and the energy grid — all of which depend on precision timing from GNSS.
A large-scale GPS failure would cause a £1 billion a day economic impact to the UK. Loss of this accurate data would also have severe and life-threatening effects, such as on getting ambulances to patients or getting power to homes around the country. The center’s land-based technologies will improve the UK’s resilience and provide important back-up.
The UK’s current dependence on satellite technologies has been identified by the government as a potential security risk if a satellite were to experience a failure. The Blackett Review in 2018 looked at the UK’s vulnerabilities to over-reliance on Global Navigation Satellite Systems (GNSS).
The government is investing £36 million to create the National Timing Centre, which will ensure the UK economy and public services have additional resilience to the risk of satellite failure. The investment will build a resilient network of clocks across the UK. It includes £6.7 million which will be made available via Innovate UK funding calls to SMEs and industry to innovate around timing and clocks.
Science Minister Amanda Solloway announced the center on Feb. 19. “Our economy relies on satellites for accurate timing,” she said. “Without satellites sending us timing signals, everything from the clocks and maps on our phones, to our emergency services and energy grid would be at risk. I’m delighted that this world-first centre will see our brightest minds, from Surrey to Strathclyde, working together to reduce the risks from satellite failure.”
“The failure of these systems has been identified as a major risk, and The National Timing Centre programme will help to protect both vital services and the economy from the disruption this would cause while delivering considerable economic benefits,” said UK Research and Innovation Chief Executive Professor Sir Mark Walport.
“We are proud to be leading the way in providing trusted and assured time and frequency,” said National Physical Laboratory CEO Pete Thompson. “The work undertaken by the team here has ensure the National Timing Centre programme will provide huge benefits to society, whilst underpinning secure applications in the future.”
The center also includes researchers at the University of Birmingham, the University of Strathclyde, University of Surrey, BT Adastral Park, Suffolk, BBC, Manchester, and the National Physical Laboratory in Teddington.
The £76 million investment furthers the government’s commitment to significantly boost R&D investment across every part of the UK, including funding transformational technologies and increasing the number of researchers.
The funding is provided through the Strategic Priorities Fund, which supports high-quality discipline research and development priorities, with investment also going towards autonomous systems and national collections.
Editor’s Note: This online preview presents brief highlights from the upcoming July cover story in GPS World, “Navigation from LEO: Current Capability and Future Promise.” The article is by David Lawrence, H. Stewart Cobb, Greg Gutt, and Michael O’Connor of Satelles, Tyler G. R. Reid and Todd F. Walter of Stanford University, and David Whelan.
Robust position, navigation, and timing services from low Earth orbit (LEO) are here today, providing augmentation to GPS where GPS isn’t available. The addition of navigation signals from LEO provides a number of benefits. The proximity of LEO satellites has the potential to provide much stronger signals than the distant GNSS core-constellations like GPS in medium-Earth orbit (MEO).
Today, the only LEO system with global coverage is the Iridium constellation used primarily for communications.
Figure 1 shows the 31-satellite GPS constellation in contrast with the 66-satellite Iridium network. The scale of the difference in distance (several Earth radii) is extraordinary. The result is that Iridium signals are 300 to 2400 times stronger than GNSS signals on the ground, making them attractive for use in position, navigation, and timing (PNT) applications where GNSS signals are obstructed.
Figure 1. The 66 satellite Iridium constellation in low Earth orbit and 31 satellite GPS constellation in medium Earth orbit.
LEO-based PNT is now mainstream, in the form of real-time signals that have been delivered over the Iridium satellite network since May 2016. This service is made possible by Satelles in partnership with Iridium Communications Inc. in a service called the Satellite Time and Location (STL), a non-GNSS solution for assured time and location that is highly resilient and physically secure. Consumers, businesses, and governments are already using these LEO-based signals in environments with high GNSS interference or occlusion.
The security features of these signals are also used to reliably validate GNSS position, navigation and time (PNT) solutions in real time to help mitigate potential spoofing. Furthermore, the fast LEO orbits of Iridium generate Doppler-frequency signatures significantly stronger than GPS, increasing the utility of the STL signal for positioning applications.
STL field tests demonstrate a positioning accuracy of 20 meters and timekeeping to within 1 microsecond, all in deep attenuation environments indoors. This adds substantial robustness in augmenting the GNSS core-constellations like GPS and also allows for a standalone backup in many applications.
Along with its strong signals compared to the GNSS core-constellations in MEO, Iridium’s global coverage makes it ideal for use in PNT applications where GNSS is obstructed. Figure 1 shows the scale of the difference in altitude with Iridium at 780 kilometers and GPS at 20,200 kilometers. This has substantial implications not only for signal strength but also for coverage.
Though Iridium has twice as many satellites as GPS, at the equator users can often only see one satellite whereas they can see ten from GPS. This was one of the fundamental trades considered in the design of the GPS constellation. The higher the altitude, the more each launch cost; the lower, the more satellites had to be built to provide coverage. To put this in perspective, global coverage for one satellite in view at all times requires fewer than ten satellites in MEO but requires closer to one hundred in LEO.
Future LEO Constellations
The hundreds of LEO satellites needed to match the coverage of GPS may be coming. In late 2014 and early 2015, the International Telecommunication Union (ITU) reported a half dozen filings for spectrum allocation for large constellations of LEO satellites.
In January 2015, OneWeb announced a partnership with Virgin and Qualcomm to produce a constellation of 648 LEO satellites to deliver broadband Internet globally. This represents the next order of magnitude, with tenfold more satellites than Iridium. Within days of this announcement, SpaceX, with support from Google, announced a similar ambition for a constellation of more than 4,000 LEO satellites.
In August 2015, Samsung expressed interest in a proposal for a LEO constellation of 4,600. Boeing joined the race in June 2016 announcing plans for a LEO constellation of nearly 3,000 satellites. These LEO constellations are being proposed to keep up with the rising demand for broadband, not to replace ground infrastructure.
LEO versus MEO
Low- and medium-Earth orbit each have their individual strengths and weaknesses in the context of navigation. Closer to Earth, LEO offers less spreading loss and improved signal strength on the ground. On the other hand, being closer to Earth means that satellites have much smaller footprints. The GPS footprint is threefold larger than Iridium, corresponding to nine times more area covered. Hence, to achieve the same coverage as GPS with Iridium’s altitude, the LEO constellation requires an order of magnitude more satellites.
Another major difference between LEO and MEO is speed. A GPS satellite completes one Earth revolution every 12 hours while an Iridium one does so in only 100 minutes. The shorter the orbital period, the faster the angular rate (also called mean motion) and the more quickly satellites pass overhead.
The swift motion whitens multipath (making it more random–like white noise) as reflections are no longer effectively static over short averaging times. Geometric diversity also leads to effective Doppler positioning and is also desirable for carrier-phase differential GNSS, allowing for much more rapid resolution of integer cycle ambiguities.
Iridium-Satelles Satellite Time and Location (STL)
The STL service has been in operation since May 2016. Many from industry and government are already using this service to achieve a more robust PNT solution. This service will only continue to improve with the Iridium NEXT satellites under deployment; the first ten satellites of this generation were successfully launched in January 2017.
STL is a non-GNSS solution for assured time and location that is highly resilient and physically secure. STL utilizes the Iridium constellation to transmit specially structured time and location broadcasts. Due to their high RF power and signal-coding gain, the STL broadcasts are able to penetrate into difficult attenuation environments, including deep indoors.
Like GNSS signals, these broadcasts are specifically designed to allow an STL receiver to obtain precise time and frequency measurements to derive its PNT solutions. STL is able to augment or serve as a backup to existing GNSS PNT solutions by providing secure measurements in the presence of high attenuation (deep indoors), active jamming, and/or malicious spoofing.
Unlike the MEO GNSS satellites, Iridium uses 48 spot beams to focus its transmissions on a relatively small geographic area. The complex overlapping spot beams of Iridium combined with randomized broadcasts give a unique mechanism to provide location-based authentication that is extremely difficult to spoof.
The July cover story in GPS World magazine will explore all the above topics in more technical detail, and go further into the areas of signal strength in challenging environments, indoor time-transfer capability, and a section on looking forward.
The PNT service using Iridium is perhaps a sign of things to come. On the horizon are constellations like OneWeb which promise the next order of magnitude with 648+ satellites, slated for the 2020s. This most recent scale gives rise to better satellite geometry than GPS today with the added benefits of LEO.
The STL signal using Iridium sets a precedent that could lead to unparalleled navigation services that are robust due to the improved signal strength and precise due to the huge number of LEO satellites coming, each moving quickly and giving the geometric diversity needed to enable fast carrier-phase differential GNSS.
The need for such a service is already present. This would be enabling for the safety-critical autonomous vehicles under development that must operate in challenging urban environments and to a diversity of other future technologies and applications as well.
Emergency preparedness company McMurdo has launched a new family of Emergency Position Indicating Radio Beacons (EPIRBs) that will accelerate the search-and-rescue process by combining multiple frequencies — including GNSS — into a single EPIRB product.
The McMurdo SmartFind and Kannad SafePro EPIRBs are distress beacons that can support each of the four frequencies used in the search-and-rescue process: GNSS for location positioning, 406 MHz and 121.5 MHz for beacon transmission, and Automatic Identification System (AIS) for localized connectivity.
The multiple-frequency capability will ensure faster detection, superior positioning accuracy, greater signal reliability and, ultimately, accelerated rescue of people or vessels in distress, the company said.
Expanded satellite connectivity. McMurdo SmartFind and Kannad SafePro EPIRBs have a multiple GNSS satellite constellation receiver supporting Galileo (once the constellation is fully operational), GPS and GLONASS — from a single beacon. Advanced GNSS data processing results in faster detection of positioning coordinates and enhances the accuracy of the emergency location.
Most of today’s EPIRBs use 406 MHz and 121.5 MHz frequencies via satellite communication to provide location and positioning data to global search and rescue personnel who may be several hundred miles away.
The additional AIS channels on the new McMurdo SmartFind G8 AIS and Kannad SafePro AIS EPIRBs will send position signal information to standard AIS electronic equipment on nearby vessels for complementary, local tracking and rescue capabilities. This global and local rescue capability will result in quicker signal detection and faster response times.
The McMurdo SmartFind and Kannad SafePro EPIRBs are part of McMurdo’s comprehensive search and rescue ecosystem. As the world’s provider of an end-to-end search and rescue ecosystem — including distress beacons, satellite ground stations, mission control and rescue coordination systems, and rescue response products — McMurdo builds, integrates and tests products as part of a live search and rescue system. This ensures greater cohesion between distress signal transmission and reception so that beacon owners can feel confident that their signals will get to search and rescue authorities quickly.
MEOSAR compatibility. The McMurdo SmartFind and Kannad SafePro EPIRBs are designed to be fully compatible with MEOSAR, the next generation of the Cospas-Sarsat international search-and-rescue satellite system that has helped to save over 40,000 lives since 1982. MEOSAR will increase the speed and accuracy of beacon signal detection and location with new MEOSAR ground network infrastructure and additional MEOSAR satellites.
When fully deployed, a MEOSAR-compatible beacon can be located with an accuracy of location within 100 meters (328 feet), 95 percent of the time — and within five minutes of distress signal activation, all without reliance on GNSS.
McMurdo manufactures approximately 50 percent of the world’s MEOSAR infrastructure and is also leading the design of additional MEOSAR-capable beacons under the European Union’s Horizon 2020 Research and Innovation Program’s HELIOS project.
“McMurdo’s new EPIRB announcement is a major step towards achieving a unified search-and-rescue vision,” said Bruce Reid, CEO of the International Maritime Rescue Federation. “The convergence of products and systems whether AIS and 406 MHz or maritime domain awareness and search and rescue, respectively, will require a comprehensive understanding of the entire search and rescue ecosystem. I look forward to seeing more McMurdo solutions and innovations that will shape the search and rescue industry for years to come.”
The McMurdo SmartFind and Kannad SafePro distress beacons support beacon transmission, GNSS for location positioning, and AIS for localized connectivity.