A new blog offered by Inertial Labs discusses the scope of work to turn lidar point-cloud data collection into actionable deliverables. The blog, “Providing Actionable LiDAR Point Cloud Deliverables and the Inertial Labs RESEPI” by Luke Wilson, is also available as a downloadable PDF.
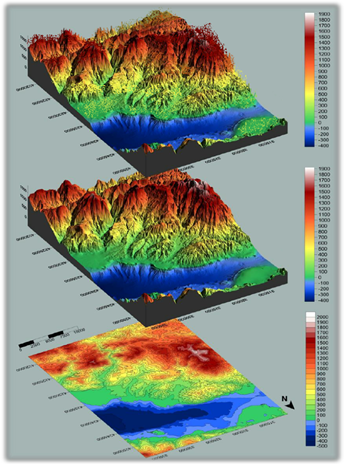
A digital terrain model, a digital surface model, and a digital elevation model (from top). (Image: Inertial Labs)
The blog introduces lidar and creation of point clouds, then discusses the use of GPS-aided inertial navigation systems (INS). “A lidar point cloud is the product of sensor fusion across a GPS-aided INS and a lidar scanner. Each sensor plays a critical role in how a lidar payload functions and the applicability of its point cloud output,” explains Wilson.
Wilson describes complications with converting datum reference frames, both traditional and reference ellipsoid such as WGS84. He also discusses projected coordinate systems. He concludes with analysis of the data using point classification — the foundation to create models including digital terrain, surface and elevation models (DTM, DSM and DEM respectively).
Finally, Wilson explains how Inertial Labs’ RESEPI is a quick and efficient way to generate models of an environment, including in fields such as construction and utility management.
RESEPI stands for REmote SEnsing Payload Instrument, Inertial Labs’ complete multiplatform, multisensor lidar and RGB payload solution for such remote sensing applications.
Inertial Labs has released a new generation of GPS-aided inertial navigation systems (INS) for applications such as UAVs, helicopters and lidar surveys.
The company also has released two new inertial measurement units (IMUs) for measuring angular rates and accelerations for motionless and dynamic applications.
INS-DH-OEM
The INS-DH-OEM. (Photo: Inertial Labs)
The high-accuracy INS-DH-OEM is designed for easy integration into custom enclosures and higher order integrated system applications. It combines the HoneywellHG4930 inertial measurement unit (IMU) into a GPS-aided INS to provide high-accuracy orientation, position, velocity and timing for land and aerial systems.
Consisting of three axes each of high-precision accelerometers and gyroscopes, the accuracy of the HG4930 plays a key role in the exceptional performance of the INS-DH-OEM. With input from the IMU, the INS-DH-OEM has a pitch-and-roll accuracy of 0.015 degrees real-mean-squared (RMS) for dynamic applications, and a pitch-and-roll accuracy of 0.01 degrees for motionless applications.
Another key factor for the INS-DH-OEM is its use of the NovAtelOEM7720 dual-antenna GNSS receiver. The OEM7720 is an all-constellation, multi-frequency heading and positioning solution with TerraStar PPP correction services and advanced interference mitigation features.
With aiding data from the OEM7720, the INS-DH-OEM features a 2-meter baseline heading accuracy of 0.05 degrees RMS for both static and dynamic applications. As a result, the INS-DH-OEM is a high-performance solution in line-of-sight and beyond line-of-sight antenna-pointing applications.
A reliable solution in varying environments, the OEM7720 ensures that the INS-DH-OEM is outputting the most accurate GNSS-aided data by supporting GPS, GLONASS, BeiDou, Galileo, NavIC (IRNSS), and QZSS constellations.
The INS-DH-OEM can be applied in a wide range of aerial applications such as remote sensing, flight control and photogrammetry in which the INS-DH-OEM provides accurate positioning, navigation and timing (PNT) data for multi-rotor drones, fixed-wing drones and other UAVs performing these tasks. This data is paramount in the accuracy of these applications’ deliverables such as point clouds, orthomosaics and photogrammetric plots.
Weighing 280 grams and measuring 85.7 x 62.5 x 52.0 mm, the INS-DH-OEM is a lightweight, compact system that can be fitted with custom enclosures or integrated into higher order systems such as lidar payloads. It is compatible with scanners from many lidar manufacturers: Livox, Velodyne, Ouster and Quanergy. This adaptability, coupled with top-of-the-line subcomponents and Inertial Labs’ sensor-fusion expertise, make the INS-DH-OEM the suitable for UAVs, UGVs, antenna pointing, and many more applications.
INS-U
The INS-U. (Photo: Inertial Labs)
The new INS-U GPS-aided INS with air data computer (ADC) output signal is based on a u-blox module.
The INS-U a fully integrated INS, attitude and heading reference system (AHRS), IMU and air data computer high-performance strapdown system that determines position, navigation and timing information for any device on which it is mounted.
The INS-U utilizes a single antenna, multi-constellation U-Blox GNSS receiver. With access to GPS, GLONASS, Galileo, QZSS, and BeiDou, the INS-U can be used in a variety of GPS-enabled environments and is protected against spoofing and jamming. Additionally, the INS-U is comprised of two barometers, a miniature gyro-compensated fluxgate compass, and tri-axis temperature calibrated advanced MEMS accelerometers and gyroscopes. These high-performance sensors, along with Inertial Labs’ new on-board sensor fusion filter, state of the art guidance and navigation algorithms, provide accurate position, velocity, and orientation of the device under measure.
Perhaps the most defining feature of the INS-U is its embedded ADC. An essential avionics component for modern UAV applications, an ADC outputs static & dynamic pressure, pressure altitude, calibrated & true airspeed, true angle of attack, rate of climb, and wind speed of the device under measure. This data, combined with inertial reference information, provides UAVs with accurate information about the unit and its relation to its environment.
By using data from an INS, AHRS, IMU and ADC, the INS-U provides a complete navigation solution for UAV and Helicopter applications. The unit can use time-of-flight aiding data from a ground station for long term GNSS-denied conditions as well as external position and heading so it can still output accurate PNT information regardless of the environment.
The INS-U is a lightweight and compact solution with dimensions of 82 x 40 x 26 mm and a weight of less than 200 grams. This, along with an IP67 environmental enclosure, ensures that the INS-U can meet the environmental requirements and size and weight restrictions of a wide range of applications.
IMU-NAV-100
The IMU-NAV-100. (Photo: Inertial Labs)
The IMU-NAV-100 is a tactical grade IMU for wide range of higher order integrated system applications.
The newest addition to the Inertial Labs Advanced MEMS sensor-based family, the IMU-NAV-100, is now the best performing IMU that Inertial Labs offers. The IMU-NAV-100 is a fully integrated inertial solution that measures linear accelerations, angular rates, and pitch and roll with high accuracy utilizing three-axis high-grade MEMS accelerometers and three-axis tactical grade MEMS gyroscopes.
The IMU-NAV-100 features continuous built-in test, configurable communications protocols, electromagnetic interference protection, and flexible input power requirements which allow it to be easily integrated in a variety of higher order systems.
The IMU-NAV-100 line contains two options to accommodate a variety of projects.
The IMU-NAV-100-S is best for projects that require high performance stabilization for antenna and line-of-sight stabilization systems, motion control sensors, and platform orientation and stabilization systems. With a gyroscope angular random walk of 0.04 deg/√hr, the IMU-NAV-100-S is specialized to provide accurate data for stabilization applications.
The IMU-NAV-100-A is best used in a variety of systems such as GPS-aided INS, AHRS, and motion reference units. Regardless of the application, the IMU-NAV-100 is the company’s best performing IMU to date, providing a pitch-and-roll accuracy of 0.03 deg RMS. Fully calibrated, temperature compensated, and mathematically aligned to an orthogonal coordinate system, the IMU contains up to 0.5 deg/hr bias in-run stability gyroscopes and 0.003 mg bias in-run stability accelerometers with very low noise and high reliability.
VectorNav’s new Tactical Series includes the VN-110 IMU/AHRS, the VN-210 GPS/INS and the VN-310 dual-antenna GPS/INS.
VectorNav Technologies, manufacturer of embedded navigation solutions, has introduced the Tactical Series, a next generation family of high-performance Inertial Navigation Systems (INS).
The announcement was made at AUVSI’s Xponential 2016, being held this week in New Orleans, Louisiana.
Built on a common tactical grade proprietary MEMS inertial sensing core, the Tactical Series includes the VN-110 inertial measurement unit and attitude heading reference system (IMU/AHRS), the VN-210 GPS-aided INS (GPS/INS), and the VN-310 dual-antenna GPS/INS.
The Tactical Series leverages VectorNav’s navigation algorithm expertise and extensive experience in integrating its industrial series products into a broad range of airborne, marine and ground-based platforms. As a result, the Tactical Series offers the same functionality and features as Industrial Series for integrators of SWaP-C (size, weight, power and cost) constrained manned and unmanned systems.
Designed and engineered at VectorNav’s headquarters in Dallas, Texas, the Tactical Series takes advantage of the latest developments in solid state MEMS technology to incorporate a 3-axis gyro with <1˚/hr in-run bias stability, leading to an attitude accuracy of 1 to 2 mrad. In addition to the improved IMU core, the Tactical Series enclosure is designed to DO-160G standards and rated IP68 for deployment in harsh and extreme environments.
“The Tactical Series is the culmination of many years of development effort and collaboration with systems integrators across a broad range of industries,” said VectorNav President John Brashear. “We have combined our digital filtering expertise and experience in solving the challenging navigation requirements of customers worldwide to develop what is truly a next generation navigation solution.”
The Tactical Series addresses navigation needs for a variety of unmanned applications and will be on display at VectorNav’s booth (#1043) at XPONENTIAL 2016 in New Orleans, May 3-5.