Only if you have been living under a rock will it be a surprise to hear that the unmanned helicopter called Ingenuity has arrived on Mars attached to the SUV-sized rover called Perseverance. Both have been on the Red Planet since they landed on Feb. 18.
NASA has since then been in checkout and test mode for both rover and UAV, but Perseverance got a pretty clean bill of health and was commanded to motor over to a flat piece of adjacent Jexero crater — now referred to as the airfield or heliport. There, Ingenuity was detached from the underbelly of Perseverance. Then the little bird lost its power feed from mama rover. Now it has to rely on its own batteries and a small solar panel. The big SUV rover pulled away to a safe 215-foot distance ,and the folks at NASA set about preparing Ingenuity for flight.
This article was written during the period when things were proceeding with some hesitancy and delay, so things in the article unfold in the same sequence as we all experienced them while we eagerly awaited Integrity’s maiden flight.
Countdown to Flight
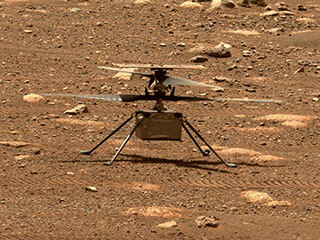
At only 4 pounds (weighing 1.5 pounds on Mars), the Ingenuity UAV is small, but it’s packed with electronics that allow it to communicate via top-mounted antennas with the rover.
It carries a lithium ion battery recharged by a small solar panel mounted on top (350 watts is required for a 90-second flight). The UAV also contains heaters to maintain the avionics through the cold of the Martian night. It carries two cameras — a black-and-white navigation camera and a high-density color imager — plus sensors for image processing, data collection and storage, navigation processing and vehicle control.
One of the objectives for this first flight demonstration is the miniaturization and weight reduction of all these electronics. The NASA website is a little obscure about how the UAV navigates, but perhaps it uses some form of terrain matching/image processing in conjunction with an onboard inertial sensor and laser altimeter.
Early Shutdown. The UAV had already survived a few nights on its own at around -117F when NASA began to spool up the two four-foot long blades to around 50 rpm during the checkout, and all seemed well until April 9, when a full-speed 2400 rpm spin-test began, and there was an early shut-down due to a watchdog timer — intended to shut things down if something wrong was detected prior to flight. None of this was learned in real time, as radio signal commands take more than 15 minutes to travel the 173-million-miles from Earth to Mars, with the same delay to send back data from what has already happened.
The density of atmosphere on Mars is only 1% that of Earth, so getting Ingenuity off the ground is more complicated than on Earth. The four-foot-long composite carbon blades have much more surface area than here on Earth for a typical UAV. The two contra-rotating blades spin at around 2400 rpm — a drone on Earth would typically spin its rotors at around 450 rpm.
Testing on Earth. NASA tested this configuration in a huge vacuum chamber with 1% air density, and Ingenuity flew just fine. The lower gravity on Mars — about 38% that of on Earth — will also help compensate for the lower level of lift available from the Martian atmosphere.
Because of the radio link delay to and from Mars, Ingenuity can fly and land autonomously only once commands are received. Onboard sensors provide data to enable the vehicle to execute the stored flight profile. The navigation camera provides guidance, and the 13-megapixel color-imaging camera can record the scene. Data and video collected are sent back to the rover for transmission to Earth via the Mars Reconnaissance Orbiter, an Mars satellite that acts as a data relay.

The First Hop. The first‘ hop was planned to last only a few seconds, but subsequent flights promise to be 165-foot plus, at more than 16 feet above the surface. If things go well, NASA might get more adventurous for the planned fourth and fifth flights.
All these flights are supposed to happen during the first month of Ingenuity’s flight activity; then Perseverance has to move on with its real task — searching for signs of ancient life on Mars. With no communications possible without the rover, the current plan is to abandon the little bird, even though it may still be fully functional.
Working to Clear the Watchdog Timer. NASA worked to clear the watchdog-timer problem and give Ingenuity clearance to fly. Over the weekend of April 10–11, the Ingenuity team came up with a fix for flight software. which overcomes the watchdog-timer issue.
However, before the new software could be uploaded to the ground station on Earth and sent to the Perseverance rover for onward transmission to Ingenuity, extensive testing and validation of the software change was necessary. The existing flight software had not been changed for more than two years, so it’s understandable that NASA wanted to be sure before uplinking new software.
Past the April 14 Date. The initially predicted flight date of April 14 came and went, and we still awaited news of the outcome of the next rotor spin-up test. Lift-off and autonomous flight and landing were still to come.
Meanwhile, another team member came up with a fix to the sequencing of commands that would transition Ingenuity from ground to flight mode, the place in the sequence where things had previously hung up. The revised sequence was sent to Mars and on April 16. The subsequent spin test went off successfully with the contra-rotating blades turning at the anticipated flight speed of 2400 rpm. Apparently, the work on the new version of flight control software was still proceeding, but NASA had decided they have sufficient confidence to set a new flight date of April 19.

Maiden Flight
Then, while we all slept, on April 19 at 3:30 a.m. Eastern Time, Integrity executed the command. It autonomously took off, hover edat a height of 10 feet for around 60 seconds, and then returned to its Martian airfield.
Above is a picture Integrity took of its own shadow while airborne. it was around noon on Mars in bright sunlight, hence the clear, well-defined shadow. Data received some time later via Perseverance and the Mars Reconnaissance Orbiter contained laser altimeter readings that confirmed this first flight. The color video from Perseverance also shows the spinning rotors and the UAV taking off, hovering at 10ft, descending and landing.
A small patch that Integrity carries is from the Wright Brothers’ flimsy, powered Wright Flyer, which flew for the very first time on Earth on Dec. 17, 1903. Now we have the very first powered flight on another planet. NASA has scheduled another four or five flights for Integrity, so we may soon even see moving panoramas of Mars from Integrity.
So now we can chalk up the first powered flight on another planet as another major human achievement — discounting, of course, that maybe some other species has done it eons ago. But, nah, we all know Mars is a dead planet, now.
Tony Murfin
GNSS Aerospace