Allystar Technology Co. Ltd., headquartered in Shenzhen, China, is offering new patch antennas: the AGR6302 and AGR6303. Both GNSS antenna models are designed for precision dual-frequency positioning.
AGR6302 is capable of receiving L1/L2 bands, and AGR6303 is capable of receiving L1/L5 bands. They are designed for UAVs, precision agriculture, autonomous vehicles and other applications where precision matters.
The AGR6302/AGR6303 active antenna is designed by unique technology to cover GPS, BDS, Galileo, GLONASS, IRNSS and the QZSS system (see table).
Table: Allystar
The antenna features stable signal quality at low cost. It employs a stack four-feeds antenna architecture with hybrid to achieve the multi-band operation, lower axial ratio, wider half-power beamwidth and excellent right-hand circular polarization, the company said.
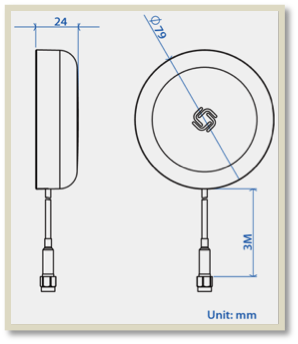
Antenna size. (Image: Allystar)
With its new architecture, the active part has two stages. It has two level low noise amplifiers (LNAs) —one for the lower bands, the other for the higher bands. Then, the combiner and the third-level LNA output the RF gain to receiver. With this architecture, the antenna provides an excellent noise figure/RF linear and LNA gain, and out-band rejection, resulting in good signal-to-noise ratio and anti-interference.
It is housed in a compact, industrial-grade waterproof and magnet mount enclosure. Using internal magnets, the antenna can be installed almost anywhere, allowing for greater flexibility.
After many years of development at the fringe of the GNSS industry, dual-frequency GNSS devices are finally ready to hit the mass market and will account for more than a billion chipset shipments in 2023, according to a new market data report by ABI Research.
ABI Research is a market-foresight advisory firm.
The report finds that the bulk of this growth will come from the adoption in the smartphone market with consumers hungry for better location accuracy.
Dual-band GNSS can mitigate the multipath interference effects, which are especially present in areas with a high density of buildings, like urban canyons, and deliver significantly higher accuracy than single-frequency devices.
Broadcom’s BCM47755 chip. (Image: Broadcom)
However, several obstacles prevented widespread adoption of dual-band GNSS until now, including insufficient satellite coverage of a second band, which could be L2 or L5/E5, high chipset prices, and challenges in fitting these integrated circuits and related antennas into small devices such as smartphones.
“On the availability side, this year has seen several satellites launched into orbit every month, most of them fitted with L5/E5 capabilities, and the Chinese and European Union governments plan to have their satellite constellations fully operational by 2020. L5/E5 devices will not be left in the dark,” said Henrique Rocha, a research analyst for Location Technologies at ABI Research.
Furthermore, new breakthroughs from key chipset manufacturers are disrupting this market by overcoming the barriers to mass dual-frequency adoption. With Location-Based Services (LBS) applications in mind, Broadcom has released the BCM47755 dual-band location hub, claiming the system’s architecture achieves the synergistic benefits that cannot be reached by multiple integrated circuits (ICs), thereby reducing its overall size and power consumption.
Other important players in this market have also come forward with dual-frequency solutions, including Qualcomm with the Snapdragon X24 LTE modem and HiSilicon with the Kirin 980 system-on-a-chip. Both attribute their superior energy efficiency and form factor to intelligent data processing and a FinFET transistor design. Other chipset manufacturers such as MediaTek are expected to follow suit and present their own dual-band products for LBS.
The Xiaomi Mi 8. (Photo: Xiaomi)
At the consumer level, considering the handset market is the largest GNSS segment, accounting for 85 percent of all GNSS chipset shipments in 2018, the launch of the dual-frequency Xiaomi Mi 8, Xiaomi Mi Mix 3 and the Huawei Mate 20 following such breakthroughs in the chipset industry is a significant development because it opens a new lane of competition between smartphone manufacturers.
It is expected that dual-frequency devices will dominate the high-end smartphone market in a matter of a few years, and by 2023 dual-band GNSS ICs will comprise 36% of total GNSS LBS IC shipments worldwide.
Triple-frequency chips. In other significant markets for multi-frequency GNSS, such as surveying and automotive applications, triple-frequency chipsets are being released, including STMicroelectronics’ TeseoAPP and u-blox’s F9. Adding a third frequency allows for better noise correction and higher accuracy compared to dual-frequency.
Image: u-blox
ABI Research believes that triple-frequency devices will see, at least for now, a relatively shy adoption as manufacturers will need to justify the cost and overcome the power issues they tackled for dual-frequency devices.
“For LBS the comparatively small accuracy gain going from dual- to triple-frequency GNSS is not worth the extra effort — for now. However, we will probably see triple-frequency GNSS take off when cars fitted with advanced driver assistance and autonomous driving systems begin to ship in large quantities,” added Rocha.
With full satellite operability of the main GNSS bands on the horizon and chipset manufacturers overcoming past hurdles for implementing dual-frequency solutions, it is likely a matter of time before most major companies in the segment scramble for a piece of this promising market. OEMs now need to show customers that dual-frequency GNSS can indeed deliver the accuracy they have promised so new location use cases can be sustained and introduced to the market.
Advanced Search Engine Replaces Google Local Search in 122 Countries
deCarta, Inc., an independent LBS platform company, is now providing the local search function for a worldwide, top-five mobile handset manufacturer. deCarta has been hosting and running the search service since August 7 using its advanced geosearch engine — L2 — and has replaced the search service previously provided by Google. The service delivers millions of responses per day to this handset manufacturer’s local search and mapping application to users in 122 countries.
deCarta’s L2 is a high-performance, scalable local search engine with single line input and intuitive user interface. deCarta sources and indexes map and POI (points of interest) content from a wide variety of sources globally but also enables customers to easily index, control and search on their own content. The customer service announced utilizes TomTom map and POI content.
deCarta’s L2 can be used as a pure geocoder for address search, or for POI search, or simultaneously as a combination of the two mixed in a single-line search query — with the additional ability to tune this behavior at runtime. This gives developers maximum flexibility and creativity in producing their applications. deCarta recently expanded country coverage to enable its customers to offer global services.
The L2 Search engine is an integral component of deCarta’s LBS platform which provides specialized geospatial technologies for maps, routing, navigation, geocoding, local search and geo-data integration and processing. deCarta provides its white-label LBS platform to companies that wish to offer their own customized, branded LBS services as opposed to utilizing industry standard services such as Bing or Google.
deCarta has two deployment options for its platform: a hosted LBS Platform Service (PaaS) or, alternatively, customers can self-host either on-premise or in a cloud service such as Amazon’s AWS. Both approaches utilize deCarta’s REST API architecture and can scale to support billions of maps and searches and millions of users per month.
“We are quite happy with the market reaction to L2 since its introduction last year,” said J. Kim Fennell, CEO of deCarta. “We’re seeing large mobile, telematics and automotive customers switch to L2 in competition against other local search engines and geocoders such as Google, Bing, Nokia/Here and Pitney Bowes. Customers appreciate L2’s technology advantages, customization capabilities, flexible content offerings, less restrictive license terms and our superior customer service — all of which creates a more satisfied end customer experience.”
L2 enables deCarta’s customers to offer flexible, advanced local search capabilities that are on par with Google Maps but beyond other search engines. Examples include:
Single line entry of POI or address or both
Fast typeahead, predictive entry – ideal for mobile devices
High tolerance for misspellings and partial entries
Random ordering of address parameters
Search for a POI near a POI such as “ATMs near AMC Theater” or “Parking near SFO”
Search for POI near a specific address, i.e. “Parking near 1234 Main Street”
Furthermore, L2 can be integrated with deCarta’s patented “Search Along A Route” technology. This combined with the ability to index custom content and boost result rankings gives automotive OEMs and service providers the ability to offer more advanced and helpful “driver-centric” connected car services.
The TET-1 satellite has Septentrio on board. (Image: DLR)
Septentrio announced today that a PolaRx2 receiver has reached more than 330 hours of successful operation on board “Technologie-Erprobungs-Träger 1” (TET-1), the first satellite of the German On-Orbit-Verification program. The Septentrio receiver is the backbone of the Navigation and Occultation Experiment (NOX) developed by German Aerospace Center (DLR). The purpose of the experiment is to prove the suitability of commercial-off-the-shelf (COTS) technology for use in space missions.
The receiver provides GPS observations on the L1 and L2 frequencies, which are used for precise orbit determination and atmospheric sounding. The dual-frequency observations allow reconstructing the orbit of TET-1 with decimeter or better 3D accuracy. A dedicated antenna pointed into the anti-flight direction of the satellite is used to collect measurements during GPS radio occultations, where the signals are tracked through the Earth’s atmosphere.
After the first activation on July 26, 2012, the receiver has operated flawlessly in the harsh environment 500 km above the Earth’s surface and has been unaffected so far by space radiation. The receiver demonstrates quick acquisition of GPS signals and tracks a sufficient number of satellites even under challenging visibility conditions. The short time-to-first-fix together with the high availability of position and timing information from the navigation solution make the PolaRx2 a very suitable receiver for space-borne applications.
“We are proud to see a new illustration that our standard commercial receivers perform flawlessly even in the harshest circumstances,” said Peter Grognard, Septentrio’s founder and CEO. “Our customers benefit every day from the same high quality and robustness for their demanding industrial applications on earth ”
In the more than 100+ articles I’ve written for GPS World magazine over the past seven years, I don’t think I’ve ever written about a new product introduction like you will see below. I tend to focus on GNSS and geospatial technologies rather than a brand-specific products and services. In fact, last week I had an outline prepared for my article that included some really cool free and useful GPS/GNSS apps. I decided to set that outline aside until later, in favor of writing about this product.
Although certainly different than mainstream GPS/GNSS receivers, I wouldn’t refer to this new product as a disruptive one (a marketing term used to describe something that is industry-changing) and it doesn’t incorporate leading-edge GPS/GNSS technology. In fact, it’s relatively low-tech in comparison to the other GPS/GNSS surveying receivers available in the marketplace.
Even more fascinating is the fact that the product was developed not by any of the mainstream GPS/GNSS receiver manufacturers you hear about today, but rather an electrical engineer from Utah who leveraged the design/manufacturing expertise of one of China’s largest manufacturers of GPS/GNSS surveying receivers.
The final nail in the coffin is the fact that I’ve expended thousands of words in GPS World denouncing the future of post-processing and celebrating the virtues of high-precision, real-time GNSS (RTK, SBAS, PPP) receivers.
I tried to talk myself out of writing this article more than once, telling myself that I’ve never written specifically about a new product and I wasn’t going to start now. But, as much as I didn’t want to, I always came back because it is so darned compelling.
While the product is not aligned with my vision of real-time being the future of high-precision GNSS receivers, it is perfectly aligned with my vision that the cost of high-precision GNSS receivers are dropping and will continue to decline considerably over the next few years.
However…it is incredibly inexpensive, and it is designed to be perfectly simple to operate.
iGage X90-OPUS Photo: iGage
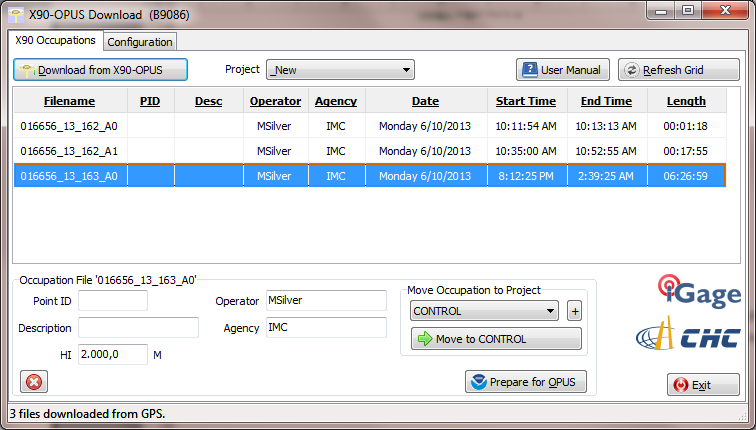
In one sentence, the X90-OPUS is a one-button, dual-frequency GPS receiver that is specifically designed to use the National Geodetic Survey’s free online OPUS post-processing service to achieve centimeter-level GPS positioning anywhere in the United States and surrounding countries.
You might say to yourself, “So what? There are plenty of GPS receivers on the market that are capable of providing this functionality.” I would make the same comment, except it has one product feature that I’ve never seen before.
The Price
What makes the X90-OPUS so compelling is its low cost. The X90-OPUS GPS receiver sells for US$2,450, including all software and accessories (except for tripod/tribrach) that allow you to submit GPS data files to OPUS in a very automated fashion.
At US$2,450, the X90-OPUS may open a new world for surveyors, engineers, and scientists who have previously shunned high-precision GPS receivers due to their high cost and complexity.
Simplicity
For those of you who yearn for the yesteryear of the one-button Ashtech’s legacy Locus GPS receiver, the X90-OPUS reminds me of that sort of simplicity, but on steroids. The X90-OPUS is a dual-frequency (L1/L2) receiver, while the Locus was a single-frequency receiver. The difference is that one can use OPUS and the other cannot. OPUS post-processing doesn’t support single-frequency GPS receivers. However, Mark Silver, the electrical engineer from Utah, has taken it a step further by developing software that automates the OPUS data submission process. Although I’ve made it clear in the past that I’m not a fan of post-processing, it doesn’t get any easier than this. You don’t need to buy a base station, and you don’t need to own post-processing software. It’s a two-button push operation: once to turn it on, and once to turn it off.
X90-OPUS Software Photo: iGage
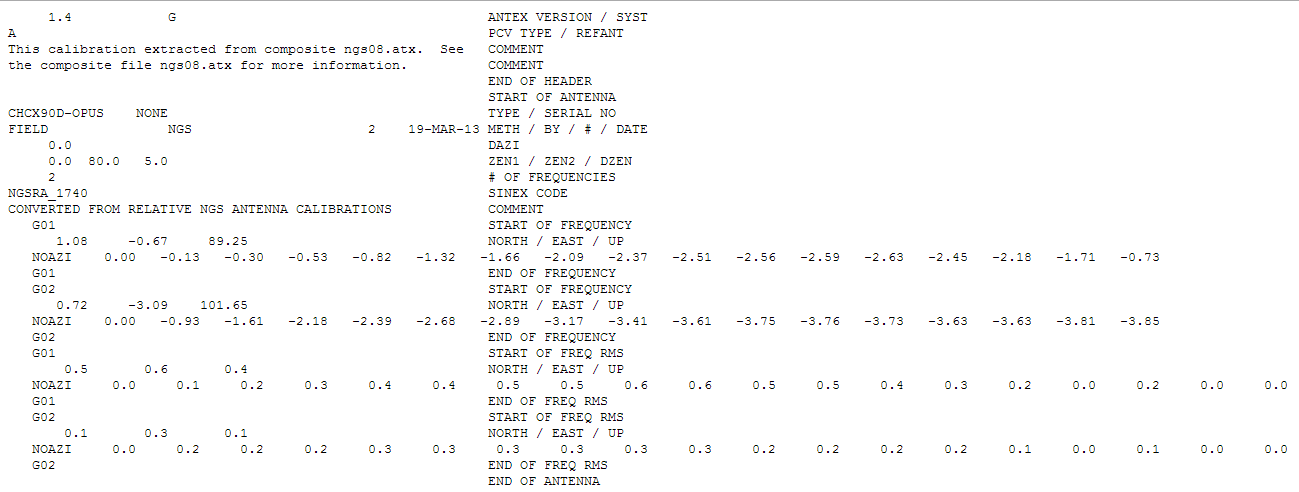
The X90-OPUS receiver was characterized by the National Geodetic Survey back in March 2013 and is listed on the NGS’s Individual Antenna Calibration website.
Photo: iGagePhoto: iGage
Pertinent Background
You might think that with the US$2,450 price point and not being offered by a major GPS receiver manufacturer, this is some home-brew GPS receiver. If you thought that, you would be incorrect. The GPS engine in the X90-OPUS is a Pacific Crest BD950, the same engine found in many receivers from other GNSS system manufacturers. CHCNav integrated the GPS engine into its casing to produce the X90 receiver. However, Mark added his own special sauce to the X90 to turn it into the X90-OPUS so this isn’t just a CHCNav receiver being marketed by iGage (Mark’s company).
In all fairness, I’ve not touched the X90-OPUS yet. I likely will in the next few days. However, unless the hardware is unreliable, I don’t see how this product is not going to be a winner, and it will introduce high-precision GPS receivers to an entirely new group of surveyors, engineers and scientists who have been holding out on using GPS.
Summary: A look at the challenge of dealing with horizontal datums in your GIS. We are moving into a new era in dealing with datum transformations. Geodata 2.0 is coming, and it can create big headaches when attempting to combine disparate geospatial databases. Sensors such as GPS receivers, remote sensing imagery, and 3D scanning provide much more accurate data, setting up a collision with outdated and mismatched legacy horizontal datums.
Speakers:
Kevin Kelly, Geodesist, ESRI, Inc.
Kevin Kelly is a Geodesist with ESRI in Redlands, California where he researches and implements geodetic algorithms and applications for the ArcGIS software. His experience spans over 35 years in hydrography, geodesy, surveying and most recently, geographic information systems. He has held the posts of Manager of Geodetic Services for the Province of Ontario, Chief Geodesist for the Kingdom of Saudi Arabia’s Military Survey Department and Senior Project Surveyor for The Keith Companies (now Stantec, Inc.). Mr. Kelly received a Master of Applied Science in Geodesy at the University of Toronto, Canada and holds an Honors Diploma in Hydrographic Surveying Technology from Humber College in Toronto. He is also a licensed Geodetic Surveyor in the Province of Ontario, Canada.
Craig Greenwald, Technical Director, GeoMobile Innovations
Craig Greenwald is the Technical Director and a principal at GeoMobile Innovations Inc. He has worked in the GPS and Mobile GIS industry for over 13 years, including seven years for GIS software leader, ESRI and is well known for his work on the ESRI ArcPad team. Craig leads the GeoMobile software development and consulting team specializing in Mobile GIS and field data collection applications and technology providing Mobile GIS software, consulting, and training services to GeoMobile Innovations? clients. Craig has real world experience designing, implementing, and consulting on all sizes of projects, ranging from local campground trash mapping to the U.S. national census, and has been a key developer in GeoMobile?s commercial applications such as LaserGIS for ArcPad and Geo-Photo Inventory Tool for Garmin GPS solutions.
Michael L. Dennis, RLS, PE, Geodesist, NOAA
Michael L. Dennis, RLS, PE, is a geodesist at NOAA’s National Geodetic Survey (NGS) where his duties include analysis of geometric (“horizontal”) and vertical datums; evaluation of data processing and survey network adjustment procedures; development and promotion of standards and guidelines; integration of NGS products and services with GIS; and public outreach. Mr. Dennis is also a registered professional engineer and surveyor with private sector experience, including ownership of a consulting and surveying firm. Mr. Dennis is an officer of the American Association for Geodetic Surveying (AAGS), an American Congress on Surveying and Mapping (ACSM) Fellow, and a member of the Arizona Professional Land Surveyors Association and the Geomatics Division of the American Society of Civil Engineers.
Moderator:
Eric Gakstatter, Editor of Geospatial Solutions Monthly and Survey Scene
Eric Gakstatter has been involved in the GPS/GNSS industry for more than 20 years. For 10 years, he held several product management positions in the GPS/GNSS industry, managing the development of several medium- and high-precision GNSS products along with associated data-collection and post-processing software.
UPDATE: The SVN65/PRN24 L5 transmitter has now been switched on. L5 is the civilian safety-of-life GPS signal, designed to meet demanding requirements for safety-of-life transportation and other high-performance applications.
UPDATE: The GPS Block IIF-3 satellite, SVN65, began transmitting L1 and L2 signals as PRN24 on October 8. A number of stations of the International GNSS Service are now tracking the satellite. The satellite is included in broadcast almanacs although it is set unhealthy and will continue to be so until satellite commissioning is completed. The satellite is still drifting towards its designated orbital position of Slot 1 in Plane A.
Meanwhile, SVN27/PRN27 was decommissioned from active service on October 6 and removed from the broadcast almanacs. However, the L-band
transmitters of SVN27 remain active, presumably for end-of-life testing.
UPDATE: According to Boeing, the satellite manufacturer, SVN65 is on orbit and performing as expected. A Boeing press release stated that “Controllers confirmed initial contact with the spacecraft at 11:43 a.m. Eastern time. The satellite’s GPS signals will be turned on and tested within a few days.”
Incidentally, the launch occurred exactly 55 years to the day after the launch of the world’s first satellite, Sputnik I, on October 4, 1957. It was Doppler tracking of that satellite that gave rise to the Transit navigation system and subsequently, its successor, GPS.
The launch of the GPS Block IIF-3 satellite took place as scheduled October 4 at 12:10 UTC (8:10 a.m. EDT), aboard a United Launch Alliance Delta IV rocket from Cape Canaveral, Florida. Spacecraft separation was reported at 16:27 UTC.
The Boeing-built spacecraft is designed to improve network coverage for both civilian and military networks, including a new L5 signal for improved commercial and civil aviation users.
The satellite, also known as SVN65, will be positioned in orbital slot 1, which is in plane A and will use the PRN24 ranging codes. Slot 1 was recently occupied by a Block IIA satellite, SVN39, operating as PRN09. SVN39 is one of the oldest operating satellites in the GPS fleet, having been launched on 26 June 1993. SVN39 underwent an initital Delta-V on September 27 to move it close to SVN38/PRN08 in slot 3 in plane A, making room for the new Block IIF satellite.
“Congratulations to the entire team on today’s successful launch of the GPS 2F-3 satellite,” Jim Sponnick, ULA vice president, Mission Operations, said in a post-launch press release.
“ULA and our mission partners have a rich heritage with the GPS program and we are proud to have served alongside the government and contractor teams over the last two decades to provide important Global Positioning System capabilities for our national defense and for millions of civilian and commercial users around the world.”
A Delta IV rocket lifts-off with an advanced GPS satellite from Cape Canaveral on Thursday. (Credit: ULA/Atkeison).
2. GPS SATELLITE SVN65 (PRN24) WAS LAUNCHED ON JDAY 278.
A USABINIT NANU WILL BE SENT WHEN THE SATELLITE IS SET ACTIVE TO
SERVICE.
3. POC: CIVILIAN – NAVCEN AT 703-313-5900, HTTP://WWW.NAVCEN.USCG.GOV
MILITARY – GPS OPERATIONS CENTER AT HTTPS://gps.afspc.af.mil/
GPSOC , DSN 560-2541,
COMM 719-567-2541, [email protected] , HTTP://gps.afspc.af.mil/GPSOC/GPS
MILITARY ALTERNATE – JOINT SPACE OPERATIONS CENTER, DSN 276-3514.
COMM 805-606-3514. [email protected]
Javad Ashjaee, founder and CEO of JAVAD GNSS, has filed a letter with the U.S. Federal Communications Commission (FCC) concerning his company’s development of technical possibilities in GNSS filter designs and components. He states “I hope this will be helpful in establishing realistic guidelines for the characteristics of high-precision GNSS receivers that will be used in critical applications.”
Below is the full text of the letter.
September 7, 2012
The Honorable Julius Genachowski
Chairman
Federal Communications Commission
445 12th Street, S.W.
Washington, D.C. 20554
The Honorable Lawrence E. Strickling
Assistant Secretary for Communications and Information
National Telecommunications & Information Administration
United States Department of Commerce
1401 Constitution Avenue, N.W.
Washington, D.C. 20230
Dear Chairman Genachowski and Assistant Secretary Strickling:
In this communication I want to inform you of the current status of technical possibilities in GNSS filter designs and components. I hope this will be helpful in establishing realistic guidelines for the characteristics of high precision GNSS receivers that will be used in critical applications.
We have improved our previous L1 filter and have extended the design to include all commercial GNSS bands.
Figure left above is our filter that protects GPS L1, Galileo L1 and GLONASS L1 bands. It brings in all the useful signals intact and rejects out of band signals with the slope of about 12 dB/Mhz. Similarly, Figure right above is our filter that protects GPS L2, GPS L5, GLONASS L2 and Galileo L5 and has slope of about 9 dB/Mhz.
These filters have been extensively tested with five different innovative tests and prove that the filters also improve the performance of GNSS receivers. These extensive innovative tests are embedded in the receivers that we mass-produce today and every user can test their receivers in all environments. These tests are much more extensive than those previously employed by PNT and other organizations. These embedded tests are not only much more extensive, but it takes only a few minutes to perform these by any novice user by clicking some receiver buttons. Compare that to the limited tests by PNT and others that took weeks to perform and needed experts with very expensive equipment in some laboratories to perform.
These filters not only protect GNSS signals against all LightSquared signals (10L, 10H and 10R handsets) but also from all similar signals that may appear near all commercial GNSS bands in the future. We are proud that our filters help allow better usage of these precious bands, in particular for broadband wireless communication that our country desperately needs.
These filters apply to wideband high precision GNSS receivers and the cost is even less than earlier conventional filters. The case of narrow-band low precision receivers (e.g. Garmin) is much simpler, as has been demonstrated by GPS receivers in more than 300 million cell phones and mobile devices which are not affected by LightSquared signals. The low precision receivers (L1 C/A code only) require filter slopes 10 times less steep than those presented here and do not necessitate additional costs.
In summary, the technology exists today of improved filter design and better performing GNSS receivers and can actually be done at a cost lower than current conventional GNSS receiver filter designs. I trust that the information that I have presented can be used in establishing the performance guidelines and requirements for all GNSS receivers used in critical applications.
I also would like to invite your representatives to ION-2012 GNSS conference where we present details and answer questions at 2:00 PM on September 20.
Regards,
Javad Ashjaee, Ph.D.
CEO, Javad GNSS
San Jose, California
USA
It has long been accepted that we may reasonably expect any new technical device to have some growing pains. If you examine the history of the space program you will discover evidence of this. In the case of the first GPS IIF vehicle on orbit we do not have a 12,552-mile screwdriver. but we do have dedicated software and systems engineers at Boeing and in the U.S. Air Force that will solve the issues that crop up and eventually present the world with a stable PNT platform.
I bring this to your attention because researchers at the German Aerospace Center (DLR) say they have found a small variance in the L5 signal on IIF-1. The signal variation results in no more than a 5-centimeter error with a predictable periodicity of about six hours. While observing the IIF, DLR also reports that the signal appears to be “hot” or stronger than anticipated or advertised by about 1/2 db.
Initial reaction from the GPS Wing and Air Force experts at Schriever AFB is that the signal fluctuation appears to be temperature-related, as the periodicity correlates directly to the temperature extremes the satellite is experiencing at this time of year in its MEO orbit. It is being investigated as a matter of course during the standard checkout of the satellite, which will continue for about another four weeks according to the original checkout schedule.
The GPS Wing is confident that all the IIF signal specifications will be met by the time the satellite is set healthy in about a month’s time and they will be able to move forward with the IIF launch schedule as planned. Obviously this could be perturbated by having to make corrections or adjustments to the satellites still to be launched, but this is normal procedure, and some leeway to correct anomalies is built into the schedule for the first few launches of any new satellite system.
Privately, one official commented, “It turns out that no one has ever made this measurement before. The Galileo SVs can only broadcast from 2 transmitters at a time so they are combining two E5 signals generated from the same transmitter. Furthermore, their data was collected during max Beta meaning when they weren’t in eclipse (less thermal variance).”
The press release from the GPS Wing reads as follows.
SMC Update. July 19 — “Officials from the Air Force Space Command, Space and Missile Systems Center’s Global Positioning Systems Wing announced the “on-orbit checkout” of the first IIF satellite is progressing as scheduled. “Nearing the half way point of its 90-day checkout period, GPS IIF SV-1 also known as SVN 62/PRN 25, is currently broadcasting the same L1 and L2 signals as previous GPS satellites and the new safety of life signal known as L5. All three signals being broadcast from SVN 62 are set unhealthy while experts monitor the quality and characteristics of the signals and the performance of the satellite.
“During the initial phase of testing, [DLR] combined L1, L2, and L5 signals in a technique used to characterize a number of known and modeled error sources from the signals. This three-frequency combining technique helps isolate “other” sources of location error, such as multi-path (when more than one path exists for signals to travel before reception), receiver errors, satellite induced errors and unmodeled phenomena. The L1, L2 and L5 signals from SVN-62 are operating nominally but DLR noticed higher residual errors than expected compared to previous somewhat similar measurements from Galileo’s GIOVE-A R&D satellite.
“The GPS Wing at Los Angeles Air Force Base has corroborated DLR’s results and is investigating root cause to share a deeper understanding of this new signal’s behavior with the user community. The causes of the phase variation are still being investigated, but they are likely the result of sensitivities to changes in the satellite’s thermal environment. SVN 62/PRN 25 is currently experiencing periods of both sunlight and total darkness (known as eclipse season) as the satellite orbits the Earth and traverses through Earth’s shadow. Tests to characterize the satellite’s performance during continuous sunlight exposure will continue after the current eclipse season ends later this month.
“Typical GPS receivers using stand-alone (single signal – L1, L2 or L5) or combinations of L1, L2 and L5 signals as part of their navigation solution will not be affected by this small phenomenon. The Air Force is committed to maintaining excellence in GPS navigation and timing services and to working with the user community to best use and exploit the new modernized GPS signals.
“When tests of this new generation of GPS satellites have been completed and Air Force leadership gives approval, the satellite signals will be set healthy and will operate as specified in the Interface Control Documents (ICDs).”
Lt. Col. David Goldstein, chief engineer for the GPS Wing, told the plenary session at the European Navigation Conference in Naples, Italy, that the Wing is experiencing some “out of family” measurements from the recently launched IIRM (20) satellite. This appears to corroborate some unofficial rumors that have circulated recently about problems with “legacy signals” from the satellite, that is, L1 and L2. The April 10 broadcast of the first L5 signal secured that frequency for the U.S. GPS program; since that signal contains no navigation message at present, it is presumably not affected by these problems.
Goldstein told the ENC opening session, Monday May 4, that the Air Force will not launch any further satellites until this issue is resolved. IIR(M) 21, the last of the IIR(M) series, is currently scheduled to rise sometime in August, with the first of the IIF generation to follow in late 2009 or early 2010.
Normally, a satellite is set healthy within 28 days of launch, after extensive testing, but this has not occurred with the satellite launched on March 24. The U.S. Air Force has formed a response team and is working “nearly round the clock” to resolve the problem, but according to Goldstein is not rushing the issue, seeking a thorough solution since the overall constellation is robust at 30 satellites.
“We are currently examining data from the satellite that is not consistent with data from the other IIR(M)s,” he stated, characterizing the variances as “measurements with larger than expected pseudorange errors that are elevation-dependent, and that we have not seen before. We have experimented with a few fixes and it looks very promising.”
He described the response team’s approach as making a “fishbone diagram” of all potential failure mechanisms, and working through them methodically. “We think we have identified the failure but it may be several more months before the analysis is complete, and the situation is fully resolved.”