News from NASA’s Jet Propulsion Laboratory
A new technology called Mars Global Localization lets Perseverance determine precisely where it is, without human help.
Imagine you’re all alone, driving along in a rocky, unforgiving desert with no roads, no map, no GPS, and no more than one phone call a day for someone to inform you exactly where you are. That’s what NASA’s Perseverance rover has been experiencing since landing on Mars five years ago. Though it carries time-tested tools for determining its general location, the rover has needed operators on Earth to tell it precisely where it is — until now.
A new technology developed at NASA’s Jet Propulsion Laboratory in Southern California enables Perseverance to figure out its whereabouts without calling humans for help. Dubbed Mars Global Localization, the technology features an algorithm that rapidly compares panoramic images from the rover’s navigation cameras with onboard orbital terrain maps.
Running on a powerful processor that Perseverance originally used to communicate with the Ingenuity Mars Helicopter, the algorithm takes about two minutes to pinpoint the rover’s location within some 10 inches (25 centimeters). Mars Global Localization was first used successfully in regular mission operations on Feb. 2, then again Feb. 16.
“This is kind of like giving the rover GPS. Now it can determine its own location on Mars,” said JPL’s Vandi Verma, chief engineer of robotics operations for the mission. “It means the rover will be able to drive for much longer distances autonomously, so we’ll explore more of the planet and get more science. And it could be used by almost any other rover traveling fast and far.”
The upgrade is especially valuable given how well Perseverance’s auto-navigation self-driving system has been working. Enabling the rover to re-plan its path around obstacles en route to a preestablished destination, AutoNav has proved so capable that the distance Perseverance can drive without instructions from Earth is largely limited by the rover’s uncertainty about its whereabouts. Now that it can stop and determine its exact location, Perseverance can be commanded to drive to potentially unlimited distances without calling home.
Implementation of Mars Global Localization comes on the heels of another innovation from the Perseverance team: the first use of generative artificial intelligence to help plan a drive route by selecting waypoints for the rover, which are normally chosen by human rover operators. Both technologies enable Perseverance to travel farther and faster while minimizing team workload.
Beyond visual odometry
Unlike on Earth, there is no network of GPS satellites in deep space to locate spacecraft on planetary surfaces. So missions — whether robotic or crewed — must come up with other ways to determine their location.
As with NASA’s previous Mars rovers, Perseverance tracks its position using what’s called visual odometry, analyzing geologic features in camera images taken every few feet while accounting for wheel slippage. But as tiny errors in the process add up over the course of each drive, the rover becomes increasingly unsure about its exact location. On long drives, the rover’s sense of its position can be off by more than 100 feet (up to 35 meters). Believing it may be too close to hazardous terrain, Perseverance may prematurely end its drive and wait for instructions from Earth.
“Humans have to tell it, ‘You’re not lost, you’re safe. Keep going,’” Verma said. “We knew if we addressed this problem, the rover could travel much farther every day.”
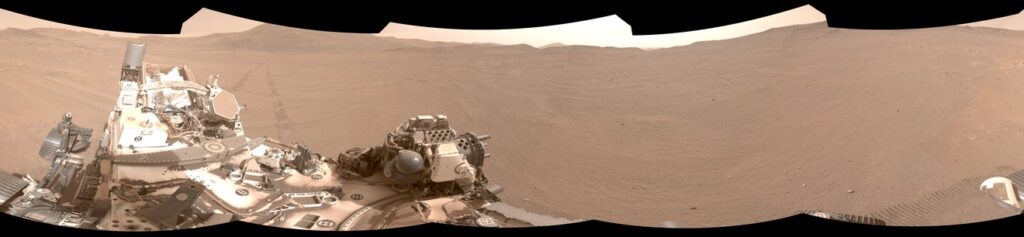
After each drive comes to a halt, the rover sends a 360-degree panorama to Earth, where mapping experts match the imagery with shots from NASA’s Mars Reconnaissance Orbiter (MRO). The team then sends the rover its location and instructions for its next drive. That process can take a day or more, but with Mars Global Localization, the rover is able to compare the images itself, determine its location, and roll ahead on its preplanned route.
“We’ve given the rover a new ability,” said Jeremy Nash, a JPL robotics engineer who led the team working on the project under Verma. “This has been an open problem in robotics research for decades, and it’s been super exciting to deploy this solution in space for the first time.”
The small team began working in 2023, testing the accuracy of the algorithm they’d developed using data from 264 previous rover stops. The algorithm compared rover panoramic photos to MRO imagery and correctly pinpointed the rover’s location for every single stop.
How Ingenuity helped
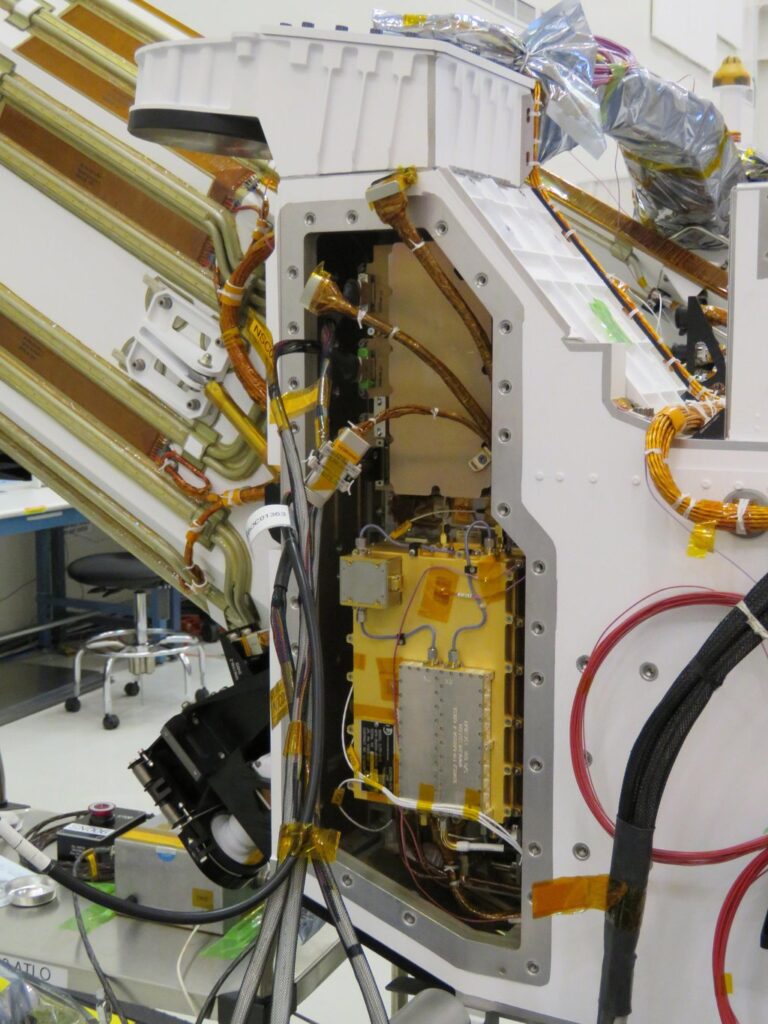
Key to Mars Global Localization is the rover’s Helicopter Base Station (HBS), which Perseverance used to communicate with the now-retired Ingenuity Mars Helicopter. Equipped with a commercial processor that powered many consumer smartphones in the mid-2010s, the HBS runs more than 100 times faster than the rover’s two main computers, which, built to survive the radiation-heavy Martian environment, are based on hardware introduced in 1997.
As a technology demonstration designed to test capabilities, the Ingenuity mission was able to risk employing more powerful commercial chips in the HBS and the helicopter even though they hadn’t been proven in space. It paid off: Expected to fly no more than five times, the rotorcraft completed 72 flights.
The power of the HBS processor inspired Verma to look for ways the Perseverance mission might harness it. “It’s almost like a gift. Ingenuity blazed the trail, proving we could use commercial processors on Mars,” Verma said.
Tapping into the HBS computer has had its challenges. To address reliability, the team developed a “sanity check”: The algorithm runs on the HBS multiple times before one of the rover’s main computers checks to ensure the results match. During testing, the team repeatedly found the rover’s position was off by 1 millimeter. They discovered damage to about 25 bits — a minuscule fraction of the processor’s 1 gigabyte of memory — and developed a solution to isolate those bits while the algorithm runs.
Alongside the broader Mars Global Localization process, the team’s sanity check and memory solutions are expected to find new uses as faster commercial processors are employed in future missions. In the meantime, the team has already turned their sights to the Moon, where difficult lighting conditions and long, cold lunar nights make knowing exactly where spacecraft are located all the more critical.
More about Perseverance
NASA’s Jet Propulsion Laboratory, which is managed for the agency by Caltech, built and manages operations of the Perseverance rover on behalf of NASA’s Science Mission Directorate in Washington, as part of NASA’s Mars Exploration Program portfolio. Learn more about Perseverance.





