In April, the pizza company Domino’s and self-driving delivery company Nuro launched autonomous pizza delivery in Houston, Texas. Select customers who place a prepaid online order on certain days and times from Domino’s in Woodland Heights can choose to have their pizza delivered by Nuro’s R2 autonomous, occupantless on-road delivery vehicle.
Customers selected for the service receive text alerts, which update them on R2’s location and provide them with a unique PIN to retrieve their order. Once R2 arrives, customers are prompted to enter their PIN on a touchscreen, opening its doors.
In February 2020, Nuro became the first autonomous vehicle developer to be given exemptions by the U.S. National Highway Traffic Safety Administration for testing on public roads without the need to have controls for human operators. Unlike many other autonomous vehicle companies, Nuro engineered its self-driving road vehicles to transport goods instead of people.
There’s no set timetable for how quickly Domino’s and Nuro will evaluate their testing or expand the service.
Nuro is also carrying out trials and pilot deliveries with several other companies, including restaurant chain Chipotle, Kroger grocery stores, CVS pharmacies, Walmart and FedEx.
The goal of the initiative is to define what is required to achieve interoperable GIS data sharing nationwide. NHTSA selected MCP following a full and open solicitation and comprehensive evaluation of all proposals. The National 911 Program, housed within NHTSA, will lead the effort.
Thousands of 911 centers in the U.S. have not deployed a nationally uniform, consistent GIS capability or mechanism for sharing GIS data. According to the NHTSA, GIS is an essential element of a truly interoperable, interconnected national Next Generation 911 (NG911) system.
In 2019, the “National NG911 Roadmap,” a report published by the National 911 Program and supported by MCP, highlighted GIS as a significant barrier to achieving a nationwide system of systems. The report emphasized the need to develop standards, requirements and best practices for sharing GIS data. Later in 2019, the program published the “Strategic Plan for 911 Data and Information Sharing,” which also underscored the need for GIS data uniformity.
Critical elements of the National 911 Program/MCP final report will include:
Current status of GIS. As 911 centers deploy NG911 and transfer calls across jurisdictions, the lack of GIS consistency poses significant problems. Many technical and non-technical challenges are associated with how GIS data is developed, processed, shared and stored among 911 entities. The report will identify the technical issues that the community must address.
Assessment of required entities, issues and partner agencies. Governance, administrative, financial and operational issues will be addressed, including resources, budget and organizations needed to overcome the gaps.
Strategies and metrics. The report will identify metrics to determine the accuracy of GIS data. It also will present strategies for overcoming the challenges found throughout the assessment process.
The National 911 Program is responsible for improving coordination and communication among federal, state and local 911 centers, personnel, and telecommunications carriers and vendors. One of the program’s primary objectives is to develop and share resources concerning the technology used in providing 911 services.
Mission Critical Partners (MCP) provides data integration, consulting, network and cybersecurity solutionsfor mission-critical communications networks in the public safety, justice, healthcare, transportation and utility markets.
In his final State of the Union address, delivered Jan. 12, President Obama signaled his intent to invest in a 21st century transportation system.
U.S. Transportation Secretary Anthony Foxx has revealed part of the president’s proposal: a 10-year, nearly $4 billion investment to accelerate the development and adoption of safe vehicle automation through real-world pilot projects.
Secretary Foxx also announced that the U.S. Department of Transportation (DoT) is removing potential roadblocks to the integration of innovative, transformational automotive technology that can significantly improve safety, mobility and sustainability.
Secretary Foxx made the announcement at the North American International Auto Show in Detroit, where he was joined by leaders in technology, executives of traditional auto manufacturers, and newcomers to the industry.
“We are on the cusp of a new era in automotive technology with enormous potential to save lives, reduce greenhouse gas emissions, and transform mobility for the American people,” said Secretary Foxx. “Today’s actions and those we will pursue in the coming months will provide the foundation and the path forward for manufacturers, state officials, and consumers to use new technologies and achieve their full safety potential.”
The president’s FY17 budget proposal would provide nearly $4 billion over 10 years for pilot programs to test connected vehicle systems in designated corridors throughout the country, and work with industry leaders to ensure a common multistate framework for connected and autonomous vehicles.
Secretary Foxx also unveiled policy guidance that updates the National Highway Traffic Safety Administration’s (NHTSA) 2013 preliminary policy statement on autonomous vehicles. The new guidance, just released, reflects the reality that the widespread deployment of fully autonomous vehicles is now feasible.
“NHTSA is using all of its available tools to accelerate the deployment of technologies that can eliminate 94 percent of fatal crashes involving human error,” said NHTSA Administrator Mark Rosekind. “We will work with state partners toward creating a consistent national policy on these innovations, provide options now and into the future for manufacturers seeking to deploy autonomous vehicles, and keep our safety mission paramount at every stage.”
DOT is committing to the following milestones in 2016:
Within six months, NHTSA will work with industry and other stakeholders to develop guidance on the safe deployment and operation of autonomous vehicles, providing a common understanding of the performance characteristics necessary for fully autonomous vehicles and the testing and analysis methods needed to assess them.
Within six months, NHTSA will work with state partners, the American Association of Motor Vehicle Administrators, and other stakeholders to develop a model state policy on automated vehicles that offers a path to consistent national policy.
Secretary Foxx encouraged manufacturers to submit rule interpretation requests where appropriate to help enable technology innovation. For example, NHTSA responded to an interpretation request from BMW confirming that the company’s remote self-parking system meets federal safety standards. Click here to read this interpretation.
When interpretation authority is not sufficient, Secretary Foxx further encouraged manufacturers to submit requests for use of the agency’s exemption authority to allow the deployment of fully autonomous vehicles. Exemption authority allows NHTSA to enable the deployment of up to 2,500 vehicles for up to two years if the agency determines that an exemption would ease development of new safety features.
DOT and NHTSA will develop the new tools necessary for this new era of vehicle safety and mobility, and will consider seeking new authorities when they are necessary to ensure that fully autonomous vehicles, including those designed without a human driver in mind, are deployable in large numbers when they are demonstrated to provide an equivalent or higher level of safety than is now available.
In 2015, Secretary Foxx refocused the national dialogue about the future needs of our transportation infrastructure by releasing Beyond Traffic, a report examining the challenges facing America’s infrastructure over the next three decades. This draft framework has already influenced decisions by elected officials, planners and stakeholders nationwide, the DOT said.
In December 2015, the Secretary launched the Smart City Challenge, a national competition to implement bold, data-driven ideas that make transportation safer, easier and more reliable. He also worked to accelerate the DOT’s efforts to incorporate vehicle-to-vehicle (V2V) communication technology into new vehicles.
Steven Spriggs was pulled over by a motorcycle cop for using his iPhone while driving. He immediately held it up to show the officer that he was using Apple Maps, and not talking or texting. More about Mr. Spriggs later. With approval of the pending transportation bill in Congress, smartphone maps and navigation will be regulated. The National Highway Traffic Safety Administration (NHTSA) would receive the power to regulate apps like Google Maps or Apple Maps. NHTSA’s job would be to review navigation apps and order changes to decrease driver distractibility.
Guess who is in favor of this new regulation for smartphone apps? Automakers. Embedded navigation systems, those found in the dashboard of vehicles, are already regulated by NHTSA. Smartphone navigation apps are a much cheaper option than the systems offered by automakers, who are looking for a more level playing field and a way to slow down the smartphone navigation juggernaut.
The downside to this regulation is big. If it was just Apple and Google mapping, oversight would be simpler, but Apple App Store and Google Play Store are filled with hundreds of mapping and navigation apps. Logistically it doesn’t seem possible for the NHTSA to review all of the apps efficiently without causing interference in the market. NHTSA doesn’t currently have the budget, infrastructure or staffing to be successful.
The forum of the radio show “Car Talk” is alive with discussion on NHTSA’s desire to control navigation. The vast majority of posters point out the distraction from using a paper map or being lost. “Personally, I prefer a full-sized road atlas on the seat beside me for all my navigation needs. Taking occasional readings with a sextant helps, but is difficult while eating my Big Mac and holding the wheel with my knee,” Paul Carney writes with sarcasm. On the other side, Victor Cooper responds, “YES! It is long overdue. And I think it is about time we treat texting while driving the same as we do drunk driving…criminal penalties and all.”
I think regulation on mapping and navigation may help make the apps simpler to use and less distracting. Before passing a regulatory law, I’d like NHTSA to successfully demonstrate a review system that doesn’t impede innovation, significantly delay new products, or make it overwhelming difficult for small start-ups.
So what happened to Steven Spriggs? The police officer went ahead and wrote a $165 ticket for using a cell phone while driving, despite Spriggs argument that the law didn’t apply to navigation apps. Spriggs challenged his ticket in California’s state appeal court and won. The $165 went back into Spriggs’ pocket and map users everywhere sighed with relief,
Two Autonomous Vehicles Seek Safe Avoidance in Critical Tests
A new state-of-the-art research center runs car-makers’ safety systems through their paces, in tandem with a soft-target robot that can be crash-impacted without adverse effects. Precise positioning and exact repeatability of test sequences are key criteria.
Paul Perrone, Perrone Robotics
The Insurance Institute for Highway Safety has undertaken a $30 million expansion project at its Vehicle Research Center near Washington, D.C., enlarging and enhancing a state-of-the-art vehicle test track and building a new 700 x 300-foot (213 x 91-meter) covered track for weather-resistant testing.
The VRC will use new robotic and positioning technologies to achieve required levels of precision and repeatability for vehicle testing of frontal collision avoidance and other safety systems. Tests of both the same and different vehicles must be conducted under identical, controlled conditions for the results to have comparable fidelity.
Crash tests and research conducted at the VRC help drive life-saving improvements in vehicle designs. The new facility will enable staff to evaluate emerging automated vehicle technology in commercial vehicle systems intended to prevent crashes or lessen their severity, with the goal of encouraging the entire industry to adopt the most effective new features.
Safety systems in vehicles to be tested include the following:
◾ Adaptive cruise control
◾ Collision-imminent braking
◾ Lane-departure warning/correction
◾ Other automated technologies.
Such functions represent semi-automated functions aboard vehicles now on the road. The system is also designed to address and test the full spectrum of semi- to fully-automated vehicles, addressing evolving levels of autonomy and ultimately producing driverless vehicle technology.
IIHS has contracted Perrone Robotics, Inc. (PRI), to deliver a robotic system for testing such vehicles. PRI develops new applications using its MAX robotics and suite of automation software building blocks. MAX enables rapid integration of a range of sensor and actuator types and has evolved with several frameworks, including MAX-UGV for unmanned ground vehicles. PRI has used MAX-UGV to build automated passenger cars, all-terrain vehicles, tractors, custom platforms, and rockstar Neil Young’s long-range electric LincVolt, a converted 1959 Lincoln Continental.
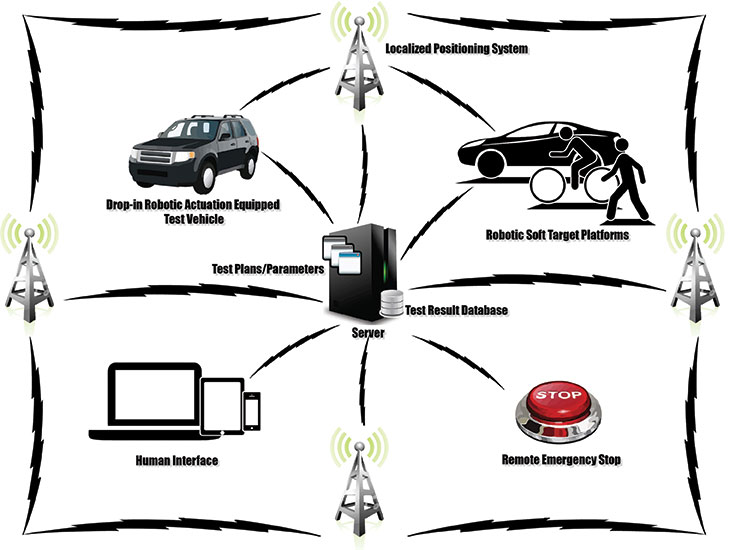
FIGURE 1. PRI test system.
For the first phase of the IIHS project, the Perrone Robotics system includes a robot target vehicle with the footprint of a car, but measuring only 4 inches high, with a 1-inch ground clearance.
A robot target vehicle with the footprint of a car measure 4 inches high. Photos: Brian J. Geiger.
Test Scenario Example. One instance to be tested is National Highway Traffic Safety Administration criteria for crash-imminent braking (CIB). The CIB concept goes beyond the forward-collision warning systems already found in many new cars by actually engaging the brakes when a driver, at fairly slow speeds, gets too close to the car in front of him. In tests, the while the test vehicle travels at similar speeds on a programmed collision course with the robot.
The target robot vehicle carries one of a number of soft targets. If the vehicle under test fails to prevent a collision with the robot target, the test vehicle runs over the robot target vehicle, dislodging the soft target, but avoiding damage to the test vehicle, robot target vehicle, and the soft target. The next phase of the project adds smaller-footprint target robot platforms with soft targets, representative of pedestrians and cyclists.
To ensure that the test vehicle can perform repeatable tests, the system also includes a drop-in actuator kit that can be installed into any test vehicle in 30 minutes or less. The system is designed to allow a human driver to sit comfortably in the vehicle and optionally drive, but can also control the throttle, brake, and steering to drive test profiles. Repeatability is key for the operation of robots and vehicles, as well as track conditions, which will be helped by the covered track.
The VRC test track is installing Locata as its positioning system. In addition to alleviating concerns about GPS outages or dead/weak signal spots, this enables the PRI system to be operated reliably inside the new covered test track. While GPS is not an option for covered or indoor test sites and suffers from environmental issues, the high fidelity and localized positioning provided by Locata overcomes these barriers to test.
Drop-in actuator kit steering. Photos: Brian J. Geiger.Drop-in actuator kit throttle-brake. Photos: Brian J. Geiger.
PRI will deliver the target robot and drop-in actuators custom-built. The company looked at starting with existing platforms and building from them, but it would have been infeasible or overly expensive to meet the IIHS requirements for this system. Most existing systems were developed for vehicle dynamics testing or low-speed/simple collision testing. Most couldn’t handle some or all of the more challenging requirements such as the following:
Drop-in actuator kit:
Allow human driver to sit comfortably and drive the vehicle without interfering;
Drive autonomously while also allowing for hybrid modes whereby test drivers and onboard systems may assist or take over controls;
Offer out-of-the-box programmability and flexibility to handle a wide range of test scenarios and automated vehicle levels;
Install into any vehicle in 30 minutes or less;
Do not damage vehicle with installation; retain a significant percent of resale value.
Target robot vehicle:
Accelerate from 0 to 55 mph in 10 seconds;
Survive collisions at speeds up to 55 mph;
Allow collision-avoidance testing with minimal damage to test vehicles and target robot;
Scale for carrying a wide variety of soft-target payloads and enable a wide range of vehicles, from small car to SUV to tractor-trailer) to be tested.
Locata positioning system:
Work outside and also on covered track; cover track area with no dead/weak spots;
Deliver better than 10-centimeter accuracy for position measurements and relative position control of robots and vehicles;
Deliver position updates at 100 Hz in combination with attitude and heading reference system (AHRS) or inertial navigation system (INS).
The positioning requirement derives from the testers’ need not only for accurate location data of each vehicle, but for precise knowledge of how far apart they are while performing real-time control to orchestrate repeatable scenarios, intersecting vehicle and robot paths to determine whether the vehicle acts to prevent a collision.
A human operator is easily accomodated within the drop-in actuator kit. Photos: Brian J. Geiger.
Safety Systems
There is a driver in the test vehicle, and there are personnel present at the test site who could be injured by a test vehicle or target robot platform. In addition to wireless e-stop remotes, the test vehicle and target robot systems can be disabled and stopped by a number of events. In the target robot, an e-stop causes the battery pack to be completely disconnected from all vehicle systems, and a spring-load is released applying mechanical braking to stop the vehicle.
Under normal conditions, the spring is held back with a pneumatic system and air is dumped upon e-stop event. A target robot e-stop is triggered by
◾ remote e-stop controller
◾ a command issued by control software
◾ loss of communication with external systems
◾ failure of or loss of communication with internal systems
◾ loss of power.
Aside from fail-safe remote and onboard e-stop systems, additional safety measures are employed by means of safety controllers that monitor safety-critical regions of software, implement a wide range of robot-safety checking rules, and ensure that the robot is operating within safe parameters of the environment (such as by staying within an invisible fence and pre-defined operation boundary).
Common MAX-UGV Robot Logic
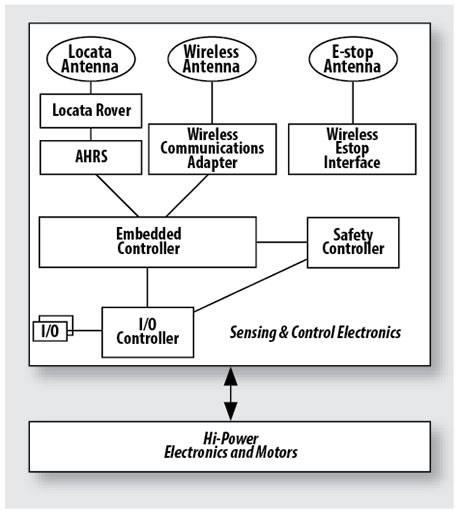
A common instrumentation and control system (CICS) for both the target robot platforms and test vehicle instrumentation and robotic assist platforms is illustrated in Figure 2.
FIGURE 2. Target robot logic flow.
Embedded Controller. The heart and soul of the vehicle hosts and runs the algorithms, receives sensor data, and executes actuation commands to the motor controllers based on desired route plans and dynamic sensor information. This controller runs the MAX software platform, MAX-UGV framework, and various MAX drivers.
I/O Controller. Handles inputs from sensors for temperatures, voltages, and currents as well as monitoring limit switches and actuating relays. Certain controls are planned such as mock brake lights on target robots and warning lights in test vehicles.
Locata. A constellation of nine LocataLite units on towers covers the existing track for Phase I of the project. Phase 2 will require additional units to add coverage to the covered track; some towers will provide coverage to both tracks. Each target robot vehicle and each drop-in kit for the test vehicles carries a Locata rover.
Locata’s new software essentially adds some capability from its indoor software to its outdoor software to deal with reflections/multipath issues caused by the metal buildings at the test site. The new software also allows the rover to perform real-time calculations on board, required for the less-than 10-cm accuracy. Previously this had to be done on a separate system and data had to be transferred back and forth, which worked against meeting real-time position update requirements for controlling speed, position, and relative position of robots and test vehicles. In test vehicles and target robots, the Locata rover position updates are merged with the output of an attitude, heading, and reference system (AHRS).
AHRS. The CICS in the robots and test vehicles includes an AHRS that provides the required heading, position, and velocity updates. Accuracy requirements are heading, 1 degree; position, less than 10 centimeters; velocity, 1 mph. Our required position update rate is 10 Hz. We expect to achieve 100 Hz in our system, which improves self-nav capability and overall performance. This rate also applies to other measured/logged data. A Kalman filter computes data from sources within the AHRS and from external sources: GPS and Locata.
Wireless Adapter, Antenna. On our critical channel, we exchange messages between vehicles to effect proper trajectory and relative positioning. Our e-stop controllers and safety systems also use this network. The non-critical channel is used for test setup and supervisory control, decimated data transmission for HMI monitoring, and logged data transmission.
Wireless E-stop Interface. This interface is for remote shutdown of a vehicle. The e-stop triggers are similar for the test vehicle systems, but the driver can also disable the robotic system. Rather than brake the test vehicle, an e-stop of the test vehicle systems disables the steering, brake, and throttle actuators into limp-mode and releases control of the test vehicle to the driver.
Safety Controller. A separate watchdog controller monitors live conditions and the embedded controller and onboard systems, and serves as a direct line for remote wireless e-stop.
Electronics, Motors. These includes six high-performance 4-inch motors, motor controllers, cut-off contactors, and overall cut-off system for e-stop.
Conclusion
The IIHS expansion project is a first of its kind for automated vehicle testing, breaking new ground for target positioning and control, and providing the first indoor test track for this purpose. Data from these tests will be used to improve safety of on road semi- and fully-automated vehicles and help save many thousands of lives, setting a high bar for capability and performance of all automated vehicle functions. Requirements for safety, repeatability, and seamless handoff between driver and autonomous control of the test vehicles, as well as the speeds at which the robots must travel and survive collisions, pose significant challenges. We believe our systems meet them fully.