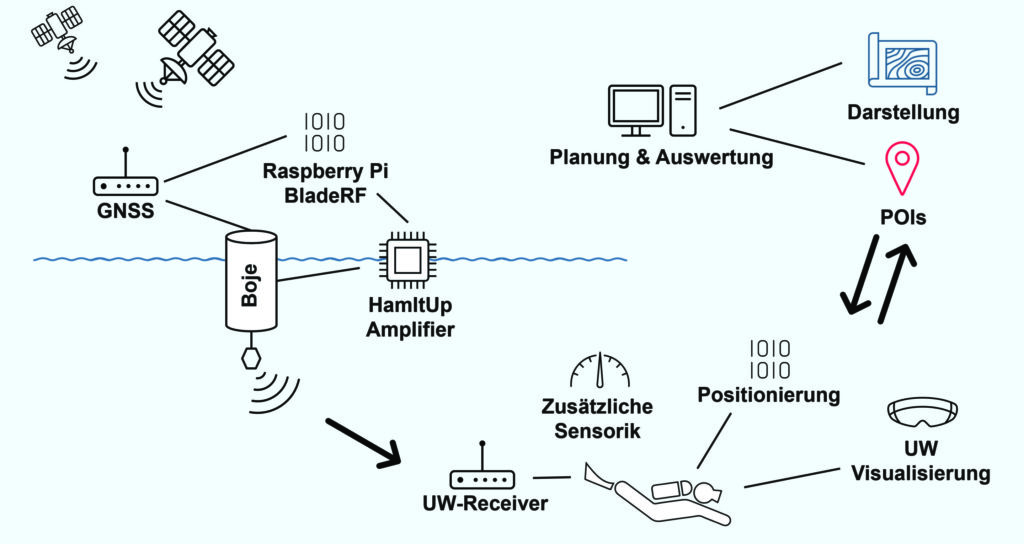
Buoys located via GNSS and electromagnetic signals enable divers to navigate underwater in a way that is gentle on the animals. A head-up display in the mask shows the appropriate routes.
A team led by Philipp Berglez from the Institute of Geodesy at Graz University of Technology, Styria, Austria, has developed a navigation system for divers that uses GNSS-supported buoys. The buoys emit electromagnetic signals to enable animal-friendly, precise positioning underwater.
Using a heads-up display in their mask, divers can find their way to their desired destinations, back to the dive boat, or around restricted areas. The divers also can always be found in an emergency.
Wave propagation the biggest challenge
The navigation system’s operating principle combines the precision of satellite navigation with the transmission of electromagnetic signals underwater. The buoys are placed in the operational area and determine their position via GNSS, more specifically via the Galileo High Accuracy Service (HAS).
A signal generator in the buoys sends electromagnetic signals to the divers, who carry a receiver the size of a cookie. Since several buoys communicate simultaneously with the divers’ receivers, the various distance information can be used to determine their position and depth using trilateration.
TU Graz and partners have developed a GNSS navigation system for divers. (Credit: TU Graz, Institute of Geodesy)
Ocean environment. “The biggest challenge for us was calculating the propagation of the electromagnetic signals underwater to obtain the appropriate distance values,” Berglez said. “The properties of the water — such as salinity, temperature, depth or conductivity — have a major influence here. Due to these diverse and variable influencing factors, modeling the propagation properties underwater was particularly challenging.”
The research team succeeded in transmitting signals horizontally over 150 meters, but the scientists still see considerable potential for optimization when it comes to penetrating greater depths of up to 100 meters.
Applications. The underwater navigation system is useful for divers in several applications. In the tourism sector, it is ideal for sport and recreational diving, where dive sites equipped with position buoys help visitors find underwater sights. They can see the route there on the mask’s head-up display. The company Oxygen Scientific has already developed a head-up display mounted on the mask.
The system is also useful in the fields of aquatic ecology, underwater archaeology and underwater debris documentation.
Wildlife Friendly. It was important to the project team that the system, unlike sonar, would not impact wildlife. Test measurements were conducted with golden rainbow trout, which are normally very sensitive to external influences.
During measurements with different transmission power levels, the fish showed no abnormal behavior, and they continued to behave normally even after the measurements were completed. The golden trout were equally unaffected one week, one month and four months after the measurements, ruling out any delayed negative effects with a very high degree of probability.
In addition to TU Graz, project partners included pentamap GmbH, 1st-Relief GmbH, Oxygen Scientific GmbH, Disaster Competence Network Austria , and the Austrian Center for Research Diving.
Image: Johan Holmdahl/iStock/Getty Images Plus/Getty Images
The Nippon Foundation—General Bathymetric Chart of the Oceans (GEBCO) Seabed 2030 Project has partnered with NORBIT Oceans, a provider of underwater imaging and mapping technology. The organizations aim to advance the field of ocean science and obtain a complete map of the entire ocean floor.
Under the partnership, NORBIT Oceans will strengthen the capabilities of the Seabed 2030 Project and its network by providing solutions involving bathymetric survey data sets, research voyages, and general survey activities.
A collaborative project between the Nippon Foundation and GEBCO, the Seabed 2030 Project aims to inspire the complete mapping of the world’s oceans by 2030, and to compile all the data into the freely available GEBCO Ocean Map. GEBCO is a joint program of the International Hydrographic Organization (IHO) and the Intergovernmental Oceanographic Commission (IOC) and is the only organization with a mandate to map the entire ocean floor.
With a focus on providing technology solutions to global maritime markets, NORBIT Oceans is one of three segments within the global technology company NORBIT ASA, based in Norway. NORBIT Oceans offers solutions for seafloor mapping, environmental monitoring, tailored products for the aquaculture and security markets, as well as customized cables.
All data collected and shared with the Seabed 2030 Project is included in the free and publicly available GEBCO global grid.
AnimaMundi is a not-for-profit organization based in Geneva, Switzerland. Its proprietary technology interprets photo and video records to extract a single-use plastic bottle count. The information can be captured via an app using still photography as well as images from drones. The data is automatically uploaded, processed and stored on the company’s servers. The data will enable decisions to facilitate environmental investments and measure the impact of waste-management initiatives.
The process begins with DJI drones piloted by sailors taking place in the Atlantic Rally for Cruisers (ARC), which started from Las Palmas in the Canary Islands, on Nov. 21. DJI provided drones to Lagoon, a sailing catamaran cruiser maker, to measure plastic waste on beaches around the Caribbean.
Of the more than 300 million tons of plastic produced every year, at least 8 million tons end up in the ocean, making up 80% of all marine debris, from surface waters to deep-sea sediment. About 33,000 single-use plastic bottles are dumped in the ocean every minute of every day, affecting every coastline.
Matt Cooper, founder and CEO, AnimaMundi is driven by the need for accurate real time data to ensure investment decisions are made correctly with measurable impact. “Just before COP26 began, world leaders admitted that an annual $100-billion climate finance goal will not be reached until 2023,” Cooper said. “The need for urgent climate action is met with the need to ensure adequate and effective financing solutions. Big data like this will help to determine priorities for action.”
Lagoon has been a partner of the ARC rally since 2005. Through its Club Lagoon, the company encourages its owners to sign up to this program aiming at reducing plastic waste in our oceans thanks to data collected by drones.
“Lagoon is proud to be partnering with AnimaMundi in this exciting data collection initiative using our ‘Club Lagoon’ as part of the solution,” said Thomas Gailly, Lagoon brand director. “We have more than 6,000 of our catamarans sailing around the world, and we can feel that our customers are more and more willing to play a role in such initiatives. It’s stimulating to think that the Lagoon owners’ community could be involved in capturing this much needed data in a highly efficient way. This partnership is the perfect complement to our own policy of respect for the environment and all the work undertaken to reduce the environmental impact of our activities.”
DJI, the global leader in developing and manufacturing civilian drones and aerial imaging technology for personal and professional use, has provided repurposed drones to capture images of the Caribbean coastline that would otherwise be out of reach. “Our drones and cameras empower people to capture amazing photos, video, and high-end professional imagery in every corner of the world,” said Olivier Mondon, senior communication manager at DJI Europe. “Each day, we learn how drones benefit society as a whole, and we are proud to have our drones embark on this environmental journey with experienced sailors who will be able to work using repurposed products to enable invaluable data capture.”
Initially targeting the Caribbean islands, AnimaMundi is also finalizing a partnership with the International Union for Conservation of Nature (IUCN) and its Plastic Waste-Free Islands (PWFI) initiative to generate weekly total island coastal plastic waste profiles covering Grenada, St. Lucia, Antigua and Barbuda.
In 2019, with the support of the Norwegian Agency for Development Cooperation, IUCN launched the PWFI project in the Caribbean, the Mediterranean and Oceania, seeking to promote a circular economy and demonstrate effective, quantifiable solutions to address plastic leakage from small island developing states.
Fugro has completed a geotechnical site characterization project for DRA Global as part of the proposed expansion of the port of Richards Bay in South Africa.
Fugro’s self-elevating platforms being positioned in Richards Bay ready for their geotechnical site characterization for the planned port expansion. (Photo: Fugro)
DRA Global contracted Fugro to acquire critical seabed geodata required for the completion of preliminary engineering and design works. The project began with a cross-continental mobilization of marine assets from Bangladesh and UAE to Richards Bay and was safely delivered despite challenging ground conditions and ongoing COVID-19 restrictions.
The very soft soils encountered at depths of more than 40 meters below the seafloor required an innovative solution for positioning the two geotechnical drill rigs safely, so Fugro mobilized two bespoke modular self-elevating platforms (SEPs) to acquire high-quality geodata in a wide range of water depths. Their experienced staff, combined with adaptable marine assets and tooling, enabled Fugro to deliver DRA Global’s requirements in full and avoid any data gaps that could have led to an over-engineered design and ultimately higher construction costs.
“Fugro performed well under difficult circumstances, including challenging site conditions and intense focus on environmental management in sensitive areas, all while working in an operational port,” said Cobus Rossouw, principal marine engineer at DRA Global. “Their robust safety management systems resulted in an investigation completed without a single lost-time incident.”
Energinet contract for wind lidar measurements
Fugro’s Seawatch lidar buoys will record continuous wind measurements to support wind-resource mapping for Denmark’s Energy Island development. (Photo: Fugro)
Fugro has secured a contract with Energinet to provide floating wind lidar measurements for what an offshore artificial energy island, which is being constructed for the Danish Government.
Fugro will install and operate four SEAWATCH wind lidar buoys at two locations, Energioe Nordsoen and Energioe Baltic, that will act as hubs connecting several offshore wind farms.
Starting this month October, the buoys will record continuous wind measurements for a minimum of one year to support wind-resource mapping for the two islands, and the engineering and design of the future wind farms. Fugro is already performing geophysical surveys for the Energy Island project under a separate contract to provide Energinet with a reliable de-risked site interpretation.
The SEAWATCH wind lidar buoy can record wind measurements up to 250 meters above sea level, and wave measurements and current profiles down to the seabed. The buoy also acts as a multipurpose platform for additional metocean sensors and, on this project, will be fitted with sensors to capture geodata on environmental impact parameters.
Contract for erosion off Indian coast
OCS Services Pvt. Ltd (OCS), one of India’s marine service providers, has awarded Fugro a two-year contract to support its asset integrity and corrosion management operations off the west coast of India.
Fugro will help OCS deliver on ONGC’s Protective Coating of Process Platform Project 1, an infrastructure project to maintain and refurbish 32 offshore platforms in seven clusters. The project is expected to be completed by May 2023.
The Nippon Foundation-GEBCO Seabed 2030 Project and Kongsberg Maritime have entered a memorandum of understanding (MOU) in support of the global initiative to produce the complete map of the ocean floor. Under the terms of the MOU, the two parties will work together to advance understanding of ocean bathymetry. The effort complements the goals of the United Nations Decade of Ocean Science for Sustainable Development.
Seabed 2030 is a collaborative project between The Nippon Foundation and GEBCO to inspire the complete mapping of the world’s ocean by 2030 and to compile all bathymetric data into the freely available GEBCO Ocean Map. GEBCO is a joint project of the International Hydrographic Organization (IHO) and the Intergovernmental Oceanographic Commission (IOC) and is the only organization with a mandate to map the entire ocean floor.
Kongsberg Maritime provides solutions for safe, efficient, and sustainable maritime operations. The solutions are suitable for offshore energies, seaborne transportation, hydrography, science, navy, coastal marine, aquaculture, training services and more. Kongsberg Maritime is the largest business area within Kongsberg Gruppen ASA. The Group has an integrated portfolio of solutions for businesses, partners and nations operating from the depths of the sea to outer space and to the digital frontier.
All data collected and shared with the Seabed 2030 Project is included in the GEBCO global grid, which is free and publicly available.
The Nippon Foundation-GEBCO Seabed 2030 Project is a collaborative project between The Nippon Foundation and GEBCO. The Seabed 2030 Project, launched at the United Nations Ocean Conference in 2017 by Chairman Sasakawa of The Nippon Foundation, coordinates and oversees the sourcing and compilation of bathymetric data from different parts of the world’s ocean through its five centers into the freely-available GEBCO Grid.
Kongsberg Maritime is a global marine technology company providing technology solutions for all marine industry sectors including merchant, offshore, cruise, subsea and naval.
The successful demo consolidates concept designs for a proposed land-sensing ESA Scout mission, HydroGNSS
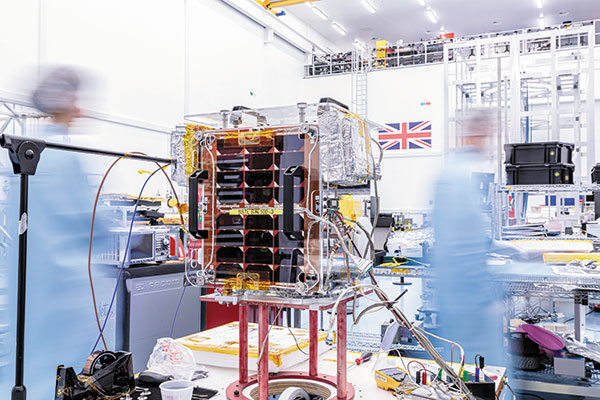
Surrey Satellite Technology Ltd. (SSTL) has successfully demonstrated GNSS reflectometry (GNSS-R) from its 18-kg DoT-1 satellite. SSTL has pioneered the new field of GNSS-R with successful payloads on board TechDemoSat-1 and the CYGNSS constellation, and is continuing to develop the technology and data analysis in pursuit of this new science.
SSTL’s DoT-1 satellite was launched in 2019. (Photo: SSTL)
The GNSS-R payload onboard the DoT-1 satellite is incorporated within a new small-form-factor Core Avionics module integral to all SSTL’s future satellite platforms. This innovation paves the way for any SSTL satellite that can accommodate a nadir pointing antenna to become part of a GNSS-R small-sat constellation.
GNSS reflectometry is an Earth-observation technique that uses GNSS signals as L-band radar sources, allowing the satellite to take measurements of ocean wind speeds, polar ice and hydrological land parameters, at a higher spatial resolution and an order of magnitude lower cost than other methods.
“GNSS-R is a powerful new science that can contribute valuable data to help monitor changes in our global climate, and I am really pleased with the success of our DoT-1 demonstration.,” said Phil Brownnett, managing director of SSTL. “We now have an advanced instrument design and deep expertise in this new field, and I am hopeful that SSTL’s HydroGNSS concept will progress to a full mission to support the global climate-control challenge.”
HydroGNSS mission
The GNSS-R technology demonstration from SSTL’s DoT-1 satellite is also an important stepping stone for a proposed European Space Agency (ESA) Scout Mission Concept called HydroGNSS, which comprises two 40-kg satellites that collect data continually in near-polar orbits, taking hydrological measurements over the whole globe.
The HydroGNSS mission concept makes advanced use of new GNSS reflectometry techniques such as Galileo signals, dual polarization, and coherent signal acquisition to measure four Essential Climate Variables (ECVs) over land: soil moisture, inundation, permafrost freeze/thaw, and biomass. HydroGNSS has been down-selected by ESA for a concept study; the finally selected Scout mission will commence in 2021.
The below animated video illustrates the HydroGNSS mission.
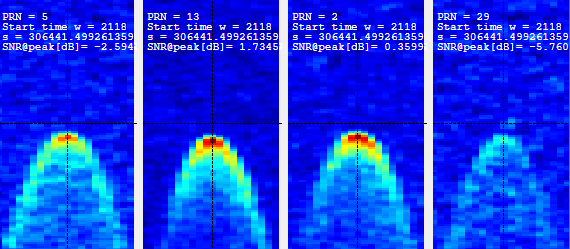
SSTL’s GNSS-R instrument collects and processes measurements into a “delay Doppler map” (DDM) that can be corrected and inverted into Level 2 products such as ocean wind speed, as has already been successfully demonstrated by the SSTL GNSS-R instruments onboard the TechDemoSat-1 and CYGNSS missions.
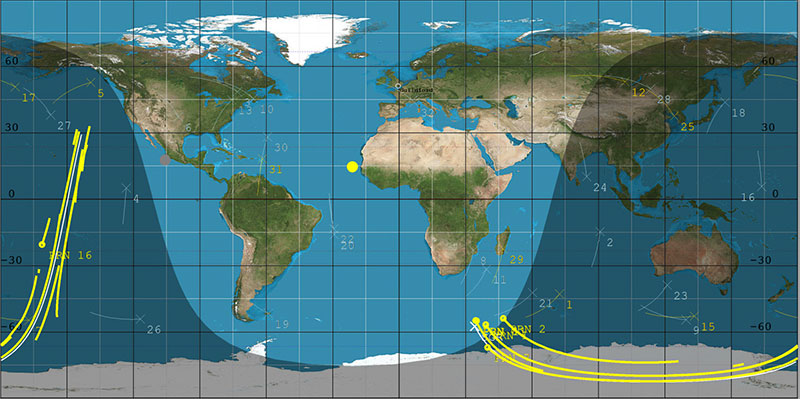
The plot below shows results from data gathered by the DoT-1 satellite on Aug. 12, and shows simultaneous DDMs from four separate GPS satellites. As this is a forward scattering technique, the stronger signals with redder peaks indicate a calmer ocean with lower wind speeds. Approximately 40 minutes of data were collected from the Pacific to the Antarctic to the Southern Ocean.
DoT-1 sub-satellite track (white) and GPS reflection tracks (yellow) collected during 40 minute data operation. (Image: SSTL)
Four Delay Doppler Maps (DDMs) collected by DoT-1 that show signal reflections from four GPS satellites. (Image: SSTL)
Soil moisture measurements
Data from the SSTL GNSS-R instruments onboard the CYGNSS mission have demonstrated the potential for soil moisture measurement by GNSS reflectometry, and preliminary work shows that GNSS-R also has good sensitivity for freeze/thaw sensing in the active zone of permafrost. Unseasonal changes in the permafrost cycles could potentially release larger quantities of methane, which risks exacerbating global climate change.
GNSS-R can also be used to assess biomass, a measure of forest density which acts as a vital sink for removing carbon dioxide from the atmosphere. In addition to longer term climate observations, soil moisture and inundation measurements from GNSS reflectometry can provide important information for short-term operational purposes, for example, towards Numerical Weather Prediction and flood warnings following rainfall events.
The development of SSTL’s new GNSS-R instrument was funded in part by the European Space Agency.
Teledyne Marine has released the Z-Boat 1800-T unmanned survey vessel, equipped with Trimble’s high-precision GNSS heading receiver and compatible with Trimble Marine Construction (TMC) software.
The Z-Boat 1800-T enables marine construction and dredging projects to run efficiently and be monitored in real time anywhere in the world.
The Z-Boat 1800-T, designed and manufactured by Teledyne Oceanscience, is a high-resolution shallow water hydrographic unmanned survey vehicle with the newly released Odom Hydrographic Echotrac E20 Singlebeam Echosounder and dual antenna Trimble BX992 GNSS heading receiver. Each sensor is integrated into a compact, portable and cost-effective package.
The combination of Trimble’s high-precision heading and positioning/guidance paired with Teledyne’s accurate/precise sonars allow for data collection under harsh conditions. Both sensors can be removed and mounted on other watercraft and barges to maximize data-collection capabilities.
The data is remotely viewable in real time, giving the operator full control and confidence. The boat’s small footprint allows access to areas that are too small, confined or unsafe for larger vessels.
Photo: Teledyne Marine
“Teledyne Marine and Trimble continue to create a paradigm shift for marine construction by providing real-time vision, guidance and survey across a project’s complete construction lifecycle — improving safety, eliminating or reducing work redoes, and helping to complete projects faster and under budget. This system provides as-building updates or what we call ‘eyes below the water,’” said Ted Germann, Teledyne Marine’s vice president of Emerging Markets.
“Trimble’s experience in GNSS guidance systems, and Teledyne’s leadership in shallow-water hydrographic surveying provides an ideal solution for marine construction contractors and surveyors,” said Kevin Garcia, general manager of Trimble Civil Specialty Solutions. “The Teledyne Z-Boat 1800T release means that near-shore construction workflows now have a quick mobilization tool to identify sub-surface obstructions, provide ad hoc inspections and increase site safety. This feature-loaded solution makes the unmanned surveying vessel affordable for all sizes of customers.”
Hyperspectral imagery of U.S. East Coast. (Image: NOAA)
Raytheon will build the Geostationary Littoral Imaging and Monitoring Radiometer (GLIMR) sensor under a contract from the University of New Hampshire. GLIMR, NASA’s selected Earth Venture Instrument-5 investigation, will be NASA’s first hyperspectral imager in geostationary (GEO) orbit.
Hyperspectral imaging collects and processes information from across the electromagnetic spectrum including visible light, infrared and ultraviolet frequencies to create a highly detailed view of physical and biological conditions in coastal waters.
The instrument will provide high-sensitivity, high-spatial and high-temporal resolution measurements of coastal and ocean ecosystems in the Gulf of Mexico, parts of the southeastern U.S. coastline and the Amazon River plume.
Decision-makers will use the GLIMR data to respond rapidly to natural and manmade coastal water disasters, such as harmful algae blooms and oil spills. It will also help improve the coastal ecosystem’s sustainability and resource management.
“GLIMR will collect the sharpest and most colorful view of physical and biological conditions in coastal waters ever seen from GEO,” said Jeff Puschell, GLIMR instrument scientist and principal engineering fellow at Raytheon Space Systems. “A hyperspectral imager is essential technology to capture new insight about our changing coastal ecosystems.”
The University of New Hampshire is NASA’s lead organization for the GLIMR contract. The instrument will launch aboard its host spacecraft in the 2026-2027 timeframe. Its data will be available to scientists, researchers and educators around the world.
Coastal Zone Mapping and Imaging Lidar System (CZMIL) to be shared at conferences as a critical rapid environmental assessment tool for both natural and manmade disasters
Teledyne Optech’s Coastal Zone Mapping and Imaging Lidar (CZMIL) system is a critical rapid environmental assessment tool for monitoring natural and man-made disasters. From detecting sewage pipe leaks, mapping oil slicks and measuring coastline changes after hurricanes, to counting underwater debris in the Great Pacific Garbage Patch, CZMIL excels at identifying and monitoring oceanic environmental changes, especially in emergency scenarios.
At the Oceans ’17 MTS/IEEE conference in Aberdeen, Scotland, Senior Scientist Viktor Feygels will present “CZMIL as a Rapid Environmental Disaster Response Tool.” Using case studies from CZMIL and its predecessor systems, Feygels will describe four distinct applications of Teledyne Optech lidar bathymeters. Attendees can catch this presentation in Room 15 on June 21 at 12:10 p.m.
Research Scientist Hieu Duong and Marine Business Manager Bob Marthouse will present “Small-Object Detection using Coastal Zone Mapping and Imaging Lidar (CZMIL)” at the Teledyne CARIS International User Group Conference in Ottawa, Canada. Conference attendees can hear about these applications on Thursday, June 22, 10:05 am, in the Rideau Room.
“CZMIL has proved to be ideally suited for rapid environmental assessment and small-object detection,” said Bob Marthouse. “Both the upcoming MTS/IEEE Oceans ‘17 conference and the recent United Nations Ocean Conference during the week of June 5 underline the urgent requirement to more critically monitor our oceans and coastlines. At Teledyne Optech, we were pleased to be part of this ongoing effort.”
Last year, in a massive crowdsourcing effort, eight million volunteers from around the world sat at their computers and searched high-resolution satellite imagery looking for signs of Malaysia flight 370, which had left Kuala Lumpur and never arrived in Beijing. The effort was akin to putting thousands of digital helicopters into the sky above 340,000 square kilometers of ocean. The project, organized by DigitalGlobe’s Tomnod group, didn’t find evidence of the plane. More than a year later and with wreckage recently discovered, it’s a good time to do a post-mortem of the crowdsourcing effort that involved amateur GPS citizen scientists from around the world.
Tomnod provided volunteers with images of the Thailand Gulf, Andaman Sea and areas of the Indian Ocean (West of Australia), an area that had been recommended for scrutiny by AMSA, the Australian Maritime Safety Authority. The area was organized by map tiles, each one-eighth of a kilometer. The images provided to the volunteers were still photos, a snapshot in time. The search followed the core rule of crowd sourcing — redundancy, and all map tiles were reviewed by multitudes of people.
The Tomnod crowdsourcing website from 2014.
I signed up to search images, and like others, was instructed to individually tag signs of wreckage, rafts, oil spills and interesting objects. Volunteers submitted 18 million tags for further review. Some of the tags were then inspected by analysts at Tomnod, but the vast majority were analyzed by computer programs alone. Search and rescue organizations were given the results to aid their search efforts.
With advancements in object recognition, one would think it possible for the initial search to be done by computer vision algorithms. Crowdsourcing could be used to manually clarify or further refine classifications. Tomnod believes identifying objects in the ocean is difficult and best done by humans, but has used digital object recognition in a new project. “For our project of mapping Swaziland to help eliminate malaria, Tomnod uses object recognition algorithms to locate buildings,” says Caitlyn Milton of DigitalGlobe. “Our next step is having crowdsource volunteers manually draw building footprints for each individual building. We either use volunteers or deploy our algorithm to identify the roof types (metal, wood or thatch), which are correlated with Malaria rates.”
Debris from flight MH370 washed up on Réunion Island in July.
Tomnod would have needed a trifecta: the correct geographic area, visible debris and identification of the debris to yield the actual crash site. Unfortunately, even with the discovery of plane parts found last month near Réunion Island in the Indian Ocean and even with analysis of ocean currents and weather conditions, it will be difficult to ascertain if the plane crashed within the Tomnod search area.
Crowdsourcing is not new to mapping. European countries offered hefty pouches of gold in the 1500s to people who could help solve the puzzle of determining latitude for maritime navigation. The competitors were well educated — mathematicians, astronomers and watchmakers. To contribute today, all one needs is a computer, a wireless connection and free time.
Next month, I’ll be in Las Vegas at CTIA’s Super Mobility 2015 reporting on industry developments. If you have interesting news, contact me.
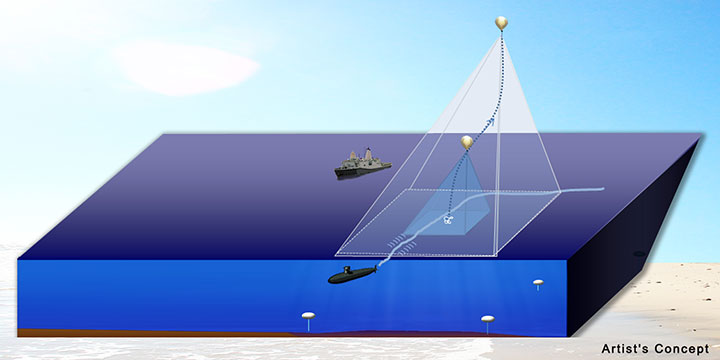
DARPA is looking for technology communities that can team to provide expertise and innovation for small sensors, expendable and small unmanned systems, and distributed communications and navigation technology.
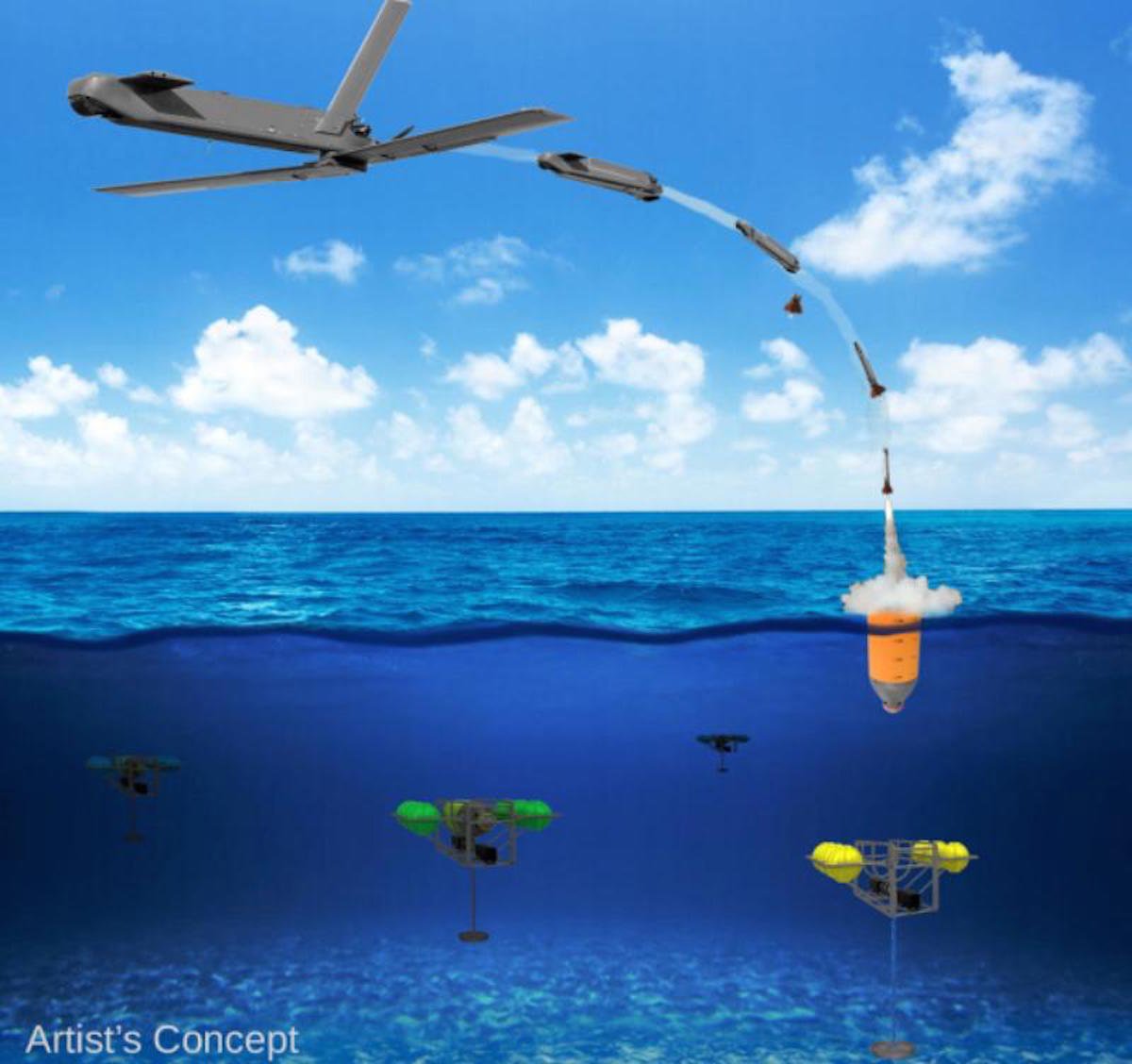
The Defense Advanced Research Projects Agency (DARPA) is researching a drone that can hibernate on the ocean floor for years at a time before being launched to the surface and into the air.
The “Upward Falling Payload” (UFP) concept centers on developing deployable, unmanned, nonlethal distributed systems that lie on the deep-ocean floor in special containers for years at a time. These deep-sea nodes could be remotely activated when needed and recalled to the surface. As DARPA terms it, they “fall upward.”
The new drones are part of a new focus by the U.S. military to develop and improve technology for emerging threats. “Today, cost and complexity limit the Navy to fewer weapons systems and platforms, causing strain on resources that must operate over vast maritime areas. Unmanned systems and sensors are commonly envisioned to fill coverage gaps and take action at a distance. However, power and logistics to deliver these systems over vast ocean areas limit their utility. The Upward Falling Payload (UFP) program intends to overcome these barriers,” DARPA said on its website.
DARPA’s statement continues: “Nearly 50 percent of the world’s oceans are deeper than 4 km, which provides vast areas for concealment and storage. As a consequence, the cost to retrieve UFP nodes is asymmetric with the likely cost to produce and distribute them to the seafloor. Concealment provided by the sea also provides the opportunity to quickly engage remote assets that may have been dormant and undetected for long periods of time, while its vastness allows simultaneous operation across great distances. Getting close to objects without warning, and instantiating distributed systems without delay, are key attributes of UFP capability.”
The UFP system would have three key subsystems:
The payload, which executes waterborne or airborne applications after being deployed to the surface
The UFP riser, which provides pressure tolerant encapsulation and launch of the payload
The UFP communications, which trigger the UFP riser to launch.
The program would need to demonstrate a system that can:
survive for years under extreme pressure
be triggered reliably from standoff commands
rapidly rise through a water column and deploy its payload.
The drones wouldn’t require fuel, as they would be powered with energy generated by ocean currents. Ocean drones would be difficult to manufacture, however, because researchers would need to figure out how to activate the drone, how to help the drone breach the surface, and make sure the drone is protected in salt water for long periods.
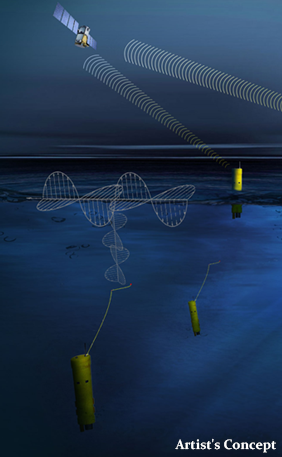
This artist’s concept shows a potential communications application of an upward falling payload. (Credit: DARPA)
Phase 2. The program is completing its first phase and is about to enter its second. During Phase 1, DARPA supported more than 10 study and design efforts to figure out approaches for long-range communications, deep-ocean high-pressure containment, and payload launch. The study teams also addressed a variety of missions for the payloads.
“In this first phase, we really learned about how the pieces come together, and built a community of developers to think differently about unmanned distributed solutions for the maritime domain,” said Andy Coon, DARPA Program Manager for the effort. “The trick is to show how these systems offer lower-cost alternatives to traditional approaches, and that they scale well to large open-ocean areas.”
In the next Phase, DARPA intends to learn from the studies, and develop and demonstrate prototype systems. DARPA is seeking teams to develop UFP nodes that combine expertise in both deep-ocean engineering and advanced payload development.
“We’re also looking for the communications technologies for these nodes. As long as you can command the nodes remotely and quickly, and don’t have to send a ship out to launch it, you’re in good shape. Some Phase 1 approaches were more exotic than others, but we were pleased by the range of challenging options,” said Coon.
In today’s fiscally constrained environment, such a system of pre-positioned, deep-sea nodes could provide a full range of maritime mission sets that are more cost-effective than existing manned or long-range unmanned naval assets.
For Phase 2, DARPA is particularly looking for technology communities that can team to provide expertise and innovation for small sensors, expendable and small unmanned systems, distributed communications and navigation technology, novel long-range underwater communications, and long-endurance mechanical and electrical systems that can survive for years in dormant states.
A panorama from the GNSS tide gauge at Onsala Space Observatory. When satellites pass over the sky, the GNSS tide gauge uses signals direct from the satellite and signals reflected off the sea surface to measure the sea level. Photo: Johan Löfgren
New Tide Gauge Uses GNSS to Measure Sea-Level Change
A new way of measuring and monitoring sea level — an important facet of researching climate change — has been implemented by scientists at Chalmers University of Technology in Sweden using existing coastal GPS stations.
When satellites pass over the sky, the GNSS tide gauge uses signals direct from the satellite and signals reflected off the sea surface to measure the sea level. Photo: Johan Löfgren
Measuring sea level is an increasingly important part of climate research, and a rising mean sea level is one of the most tangible consequences of climate change. Researchers at Chalmers University of Technology have studied new ways of measuring sea level that could become important tools for testing climate models and for investigating how the sea level along the world’s coasts is affected by climate change.
Johan Löfgren and Rüdiger Haas, scientists at Chalmers Department of Earth and Space Sciences, have developed and tested an instrument that measures the sea level using a GNSS tide gauge.
“The global mean sea level is rising because of climate change, but the change depends on where you are in the world,” said Rüdiger Haas. “We want to be able to make detailed measurements of sea level so that we can understand how coastal societies will be affected in the future.”
The GNSS tide gauge uses GPS and GLONASS signals. BeiDou and Galileo will be added in the future.
“We measure the sea level using the same radio signals that mobile phones and cars use in their satellite navigation systems,” said Johan Löfgren. “As the satellites pass over the sky, the instrument ‘sees’ their signals — both those that come direct and those that are reflected off the sea surface.”
Antenna Setup. Two antennas, covered by small white radomes, measure signals both directly from the satellites and signals reflected off the sea surface. By analyzing these signals together, the sea level and its variation can be measured up to 20 times per second. The sea-level time series is rich in physical phenomena such as tides (caused mostly by the gravitational pull of the Moon and the Sun), meteorological signals (high and low pressure), and signals from climate change. Through advanced signal processing, these signals can be studied further.
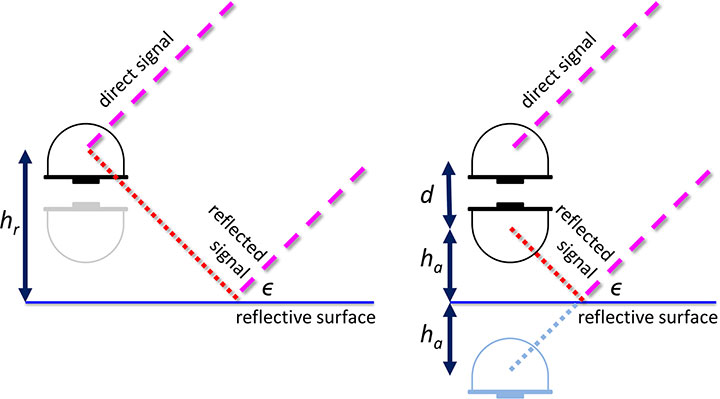
Schematic drawing of the GNSS tide gauge for SNR analysis (left) and phase-delay analysis (right). For the SNR analysis, the satellite signal with elevation ε reflects off the sea surface and interferes with the direct satellite signal at the antenna, creating an interference pattern in the recorded SNR observable that can be related to the reflector height, hr. For the phase delay analysis, the phase delays of the direct and the reflected signals are recorded separately, and through geodetic analysis of the phase delay, the baseline between the antennas can be determined and related to the height of the nadir-looking antenna over the sea surface, ha, and the vertical distance between the antenna phase centers, d.
The scientists’ initial study compared sea-level solutions from two analysis methods: signal-to-noise ratio (SNR) analysis and phase-delay analysis. The SNR analysis uses multipath signals observed with an upward-looking antenna, and the phase delay analysis uses the phase delay for both an upward- and a downward-looking antenna (see diagram).
Both GPS and GLONASS L1 and L2 signals were recorded, and the results were compared to independent measurements of sea level from a co-located pressure tide gauge. The GNSS-derived sea level showed a high correlation with the tide-gauge sea level for both analysis methods. Correlation coefficients for the phase-delay analysis and for the SNR analysis using frequency L1 were 0.95 to 0.97, whereas the correlation coefficients for the SNR analysis using frequency L2 were 0.86 to 0.87.
The phase-delay analysis shows a better agreement with the independent tide gauge sea level than the sea level from SNR analysis. Expressed as RMS differences, the phase-delay analysis achieves values of 3.5 cm (GPS) and 3.3 cm (GLONASS), whereas the SNR analysis achieves 4.0 cm (GPS) and 4.7 cm (GLONASS). The scientists concluded that, for the phase-delay analysis, it is possible to use both frequency bands, and for the SNR analysis, frequency band L2 should be avoided if other signals are available.
The GNSS tide gauge at Onsala Space Observatory uses signals from satellite navigation systems like GPS to measure the sea level. Photo: Johan Löfgren
Land and Sea. Unlike traditional tide gauges, the new GNSS tide gauge can measure changes in both land and sea at the same time, in the same location. That means both long-term and short-term land movements (post-glacial rebound and earthquakes) can be taken into consideration.
“Now we can measure the sea level both relative to the coast and relative to the center of the Earth, which means we can clearly tell the difference between changes in the water level and changes in the land,” said Johan Löfgren.
This summer, other high-precision instruments are being installed to work with the Onsala GNSS tide gauge, in collaboration with SMHI, the Swedish Meteorological and Hydrological Institute.
“Our tide gauge station will become part of a network of stations along the coast of Sweden that will be able to monitor changes in the water level to millimeter precision well into the future,” said Gunnar Elgered, professor at Chalmers Department of Earth and Space Sciences.
The scientists have also shown that existing coastal GNSS stations, installed primarily for the purpose of measuring land movements, can be used to make sea-level measurements.
“We’ve successfully tested a method where only one of the antennas is used to receive the radio signals. That means that existing coastal GNSS stations — there are hundreds of them all over the world — can also be used to measure the sea level,” said Johan Löfgren.
This work was previously reported in these publications: Larson, K.M., J. Lofgren, and R. Haas, “Coastal Sea Level Measurements Using A Single Geodetic GPS Receiver,” Adv. Space Res., Vol. 51(8), 1301-1310, 2013, doi:10.1016/j.asr.2012.04.017, 2013; and Larson, K.M., R. Ray, F. Nievinski, and J. Freymueller, “The Accidental Tide Gauge: A Case Study of GPS Reflections from Kachemak Bay, Alaska,” IEEE GRSL, Vol 10(5), 1200-1205, doi:10.1109/LGRS.2012.2236075, 2013.