“We’re at 103,000 feet. As you look up the sky looks beautiful but hostile. …Can see for over 400 miles. The sky [above me] is absolutely black. …I can see the beautiful …deep, dark, indescribable blue [sky below], which no artist can ever duplicate. It’s fantastic.”
— Capt. Joseph W Kittinger, USAF, Operation Excelsior III, August 16, 1960
This month, our journey begins in the future. Imagine you are in Alamogordo, New Mexico, a town with a rich history in America’s space program. You are here for a proof-of-concept, real-world exercise. After two years spent training, you are on a team that will test the viability of a stratospheric airframe, or high-altitude platform station (HAPS).
The exercise is a joint venture between several large corporations and U.S. government agencies. The HAPS began as a telecommunications support platform, but now includes many different industries. It will test backup systems for GPS and other sensing technologies.
Remote sensing is an obvious use case, and sensors are onboard to collect hyperspectral and thermal images, synthetic aperture radar, lidar, magnetometry, weather and other types of data. Some equipment is mounted on top of the platform to point toward space to monitor satellites and orbital debris. Also aboard are are satellite relays and space-based communications systems. Additionally, a Hubble-like observatory will support NASA research.
On the ground at the command center, other teams are working on the project. A mapping and survey team is in the field to ground truth the precision, accuracy and resolution of the HAPS data.
Autonomous vehicle manufacturers are testing telemetry data from the HAPS for improved precision navigation. Teams of imagery analysts and geospatial analysts are assessing the quality and value of the products, including full-motion video live-streamed from the HAPS.
Aerospace engineers are studying the performance of the airframe and monitoring its structural integrity. Meteorologists are providing upper air wind and weather forecasts. Several teams of engineers are managing various robotics systems onboard, and more scientists and engineers from multiple companies and agencies are testing their equipment.

Your Mission as a Stratonaut
Most tests and modifications are being handled remotely, but some require replacing the systems. This can only be accomplished by physically going to the sub-orbital station. Imagine this is your job.
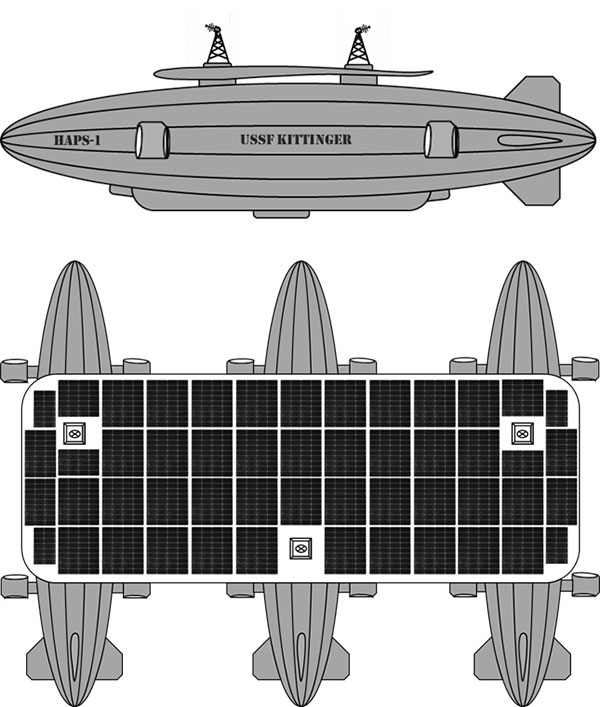
You are a remote sensing technician specially designated as a stratonaut. Your training familiarized you with the various systems onboard. You trained how to use your pressure suit — its dangers, risks and capabilities — and how to interface with the suit’s augmented reality system. You know how the HAPS operates, its schematics, and the interiors of the three connected dirigibles. You can navigate your way around the HAPS and access the various decks and compartments as well as the sensors, equipment, charging ports, fuel cells and motors. You can fly the drones, dock with the station, and enter its hangar bays. You can do maintenance on the autonomous robots and the remote-controlled robots onboard the station. You know the security and safety protocols. All this you know and more; and, if things go wrong, you know what to do.
On this mission day, it’s early morning. Sunlight is beginning to pierce the sky above the Alamogordo base station. Two technicians are helping you into your pressure suit. Another technician at a desk has your helmet hooked up to the computer. The LED lights encircling the facemask blink slowly, indicating data is being uploaded. The augmented reality face shield glows a soft blue as the data flashes across it.
Overnight at the command center, operators controlled descent of the HAPS from 100,000 feet. It takes 10 hours to reach 65,000 feet, the altitude for your rendezvous with the station. You will fly up to the HAPS in a cargo delivery drone and dock at the forward hangar bay of Station Bravo (the second dirigible). You’ll be installing an enhanced high-resolution hyperspectral sensor array in the station’s lower observation deck.
While you are busy with the installation, the autonomous robot onboard will be in the hangar bay, swapping out the station’s spent fuel cells with fresh ones carried up by the cargo drone. Each weighs 250-pounds. After this task, the cargo drone will fly to Stations Alpha and Charlie and swap out their spent fuel cells.
Once all three are completed, the cargo drone will return to Station Bravo and take you to the top of Station Charlie to install a satellite laser relay (SLR) communications system. A remote-controlled robot operated by the engineering team at base command will meet you and carry the SLR up to the tower. While you are installing the SLR, the cargo drone will dock and recharge for your return trip. The entire mission will take seven-hours and 45 minutes.
“Many functions currently done with satellites could be performed for tactical and operational commanders using near-space assets, much more cheaply and with much greater operational utility. By operationally grouping near-space with space, the functional expertise synergies would allow much more efficient delivery of space effects to the joint commander.”
— Lt. Col. Edward B. Tomme, Ph.D., USAF, Air Power Research Institute
Two Types of Pseudolites
High-altitude, long-endurance (HALE) airframes — also referred to as pseudo-satellites, pseudolites and stratolites — are of two types.
Heavier than air. The heavier-than-air (HTA) type is a lightweight, fixed-wing aircraft with extremely long wingspans. It can stay aloft for a month or more.
HTAs are limited to carrying small payloads. They typically rise to 100,000 feet during the day powered by their solar cells, and at night descend to 60,000 feet, repeating this cycle until the batteries need replacing. The HTA platform is good for short-term missions over a broad area of interest because it normally flies in large circular patterns.
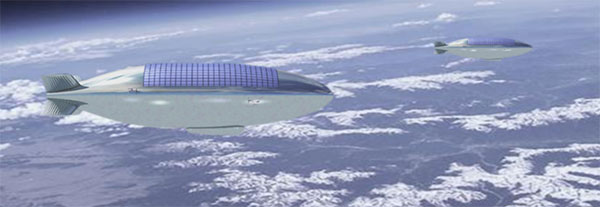
Lighter than air. The other type of pseudo-satellite is a lighter-than-air (LTA) airframe. The typical example is a dirigible, but these platforms can take on many shapes and sizes. LTAs can be enormous, with lifting capacities upward of 100,000 pounds. They operate as geostationary platforms loitering indefinitely over an area of interest and remain at the same altitude day and night. An LTA can last for 10 years or more.
The best solution is a combination of the two. A large LTA can serve as a base station to support several small HTA platforms.
“Together, NASA and the Space Force seek to advance, protect and sustain activities in, from and to space. This is truly a new era of strategic collaboration that will benefit commercial, civil and national security in space.”
— John W. Raymond, General, Chief of Space Operations, United States Space Force
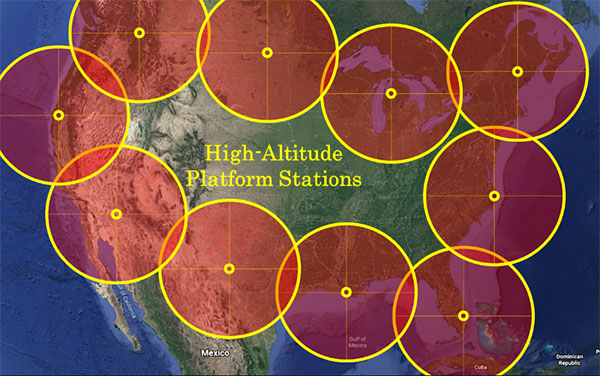
HAPS Alliance
Furthering the development of the pseudo-satellite industry is a consortium of 49 companies and universities called the HAPS Alliance, which advocates for investment in this area.
The stratosphere has become increasingly important for commercial interests and national security. HAPS can provide the best of what manned aircraft operating at lower altitudes can offer, combined with the benefits of satellites, minus much of the downside of each.
Limits of aircraft. Aircraft operating at lower altitudes offer high resolutions and targeted collection. They can be easily retasked and rerouted, and equipment can be easily repaired or replaced. Aircraft are limited by constraints of time, fuel, weight, distance and weather.
Limits of satellites. Satellites, on the other hand, provide broad area coverage and long-term, operational endurance, but they are 240 miles or more above the Earth traveling at 17,500 miles per hour, or they are 18,000 miles above the Earth to maintain a geostationary orbit. It is a trade-off between resolution and dwell time.
Other drawbacks of satellites are their expense. Launching is costly and recovery is nearly impossible to make repairs. Doing so is impractical.
HAPS do not have those limitations. They can provide long-term, persistent operations over an area of interest at very high resolutions. They also can carry a complete package of sensors and equipment with the additional benefit that most everything can be repaired or replaced with minimal cost.
How HAPS Will Improve Geospatial Data
These systems are going to improve geospatial information. HAPS will improve spectral resolutions by a factor of 10x or better. The improved location accuracy data will impact navigation, surveying, construction, emergency services, logistics, transportation, aviation, agriculture and most other industries.
The HAPS will act in tandem with cellular networks on the ground to improve internet connectivity and telecommunications. They will improve national security while monitoring the effects of climate change, deforestation, urban sprawl, ozone, pollution and natural disasters such as floods, forest fires, tornadoes, hurricanes and more.
Provided testing proves HAPS a success, the pseudosatellite era is going to greatly impact most everyone’s life. If you are lucky, you might actually become a stratonaut. If you are interested, now is the time to prepare.
“This point of observation commands an area nearly 50 miles in diameter. The city, with its girdle of encampments, presents a superb scene. I have pleasure in sending you this first dispatch ever telegraphed from an aerial station.”
— Thaddeus S. C. Lowe, First Chief Aeronaut, Union Army Balloon Corps, Civil War, 1861
William Tewelow is a Senior Aeronautical Information Specialist for the Federal Aviation Administration. He is a designated Geographic Information Systems Professionals (GISP). He served on special assignment to the U.S. Department of Transportation and led a national strategic geospatial initiative under the authority of the White House Open Data Partnership. He was among the first in the nation to earn a Geospatial Specialist Certification from the U.S. Department of Labor while working at NASA Stennis Space Center.
He is a 2016 graduate of the FAA’s management fellowship Program for Emerging Leaders. He has degrees in Geographic Information Technology and Intelligence Studies and is earning a master’s degree in Organizational Leadership with a focus on Performance Management. He is a mentor with the FAA’s National Mentor Program.
Tewelow retired from the U.S. Navy after serving 23 years as a Geospatial and Imagery Intelligence Specialist, a Naval Aviator, a Meteorologist, and a Tactical Oceanographer earning three achievement medals. He is married, enjoys traveling, connecting people, solving problems, and interested in new technology. His favorite quote is, “A man’s mind changed by a new idea can never go back to its original dimension.” ~ Oliver Wendell Holmes