Blocking interference
Interference can be blocked at the data-collection stage, using an advanced antenna.
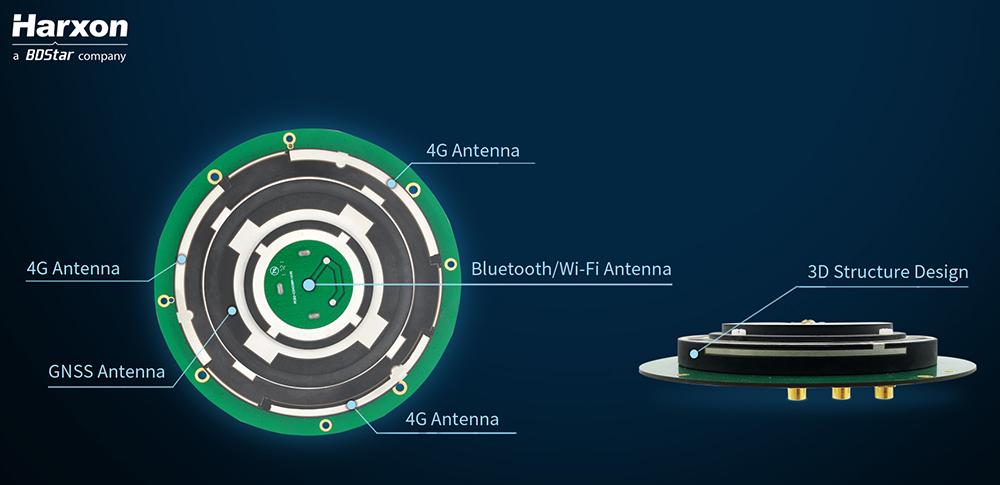
Harxon’s X-Survey is a compact high-precision GNSS antenna. It provides superior navigation and communication performance in surveying applications. A frontal band-pass filter setting effectively rejects out-of-band signals before they enter the low-noise amplifier of the antenna for signal augmentation.
Meanwhile, the filter itself has insertion loss, making a low insertion loss filter a prerequisite for optimal system noise reduction. To avoid this situation, X-Survey employs ceramic filter with low signal loss and in-band flatness to significantly improve system anti-interference capability and ensure reliable signal receiving.

See also:
How resilient PNT protects global networks from attack or failure
Is internet time good enough for cybersecurity?
Resilient receivers
Septentrio began to tackle the interference problem more than 20 years go, designing and manufacturing high-precision GNSS receiver technology with emphasis on reliability and robustness. The result is Advanced Interference Monitoring and Mitigation (AIM+) technology which secures the company’s GNSS receivers against jamming and spoofing interference. AIM+ has recently been upgraded with an extended anti-spoofing functionality.
Building on its existing spoofing detection, Septentrio has developed a new anti-spoofing algorithm for its commercial receivers. The algorithm leverages Galileo Open Service Navigation Message Authentication (OSNMA) for spoofing resistance. It was developed in the framework of the GSA FANTASTIC project with the goal of improving the security of timing in critical infrastructure.
Mobile devices and cloud applications increasingly rely on GNSS technology used by telecom companies. Having secure and robust GNSS receivers in telecom infrastructure is key to reliable mobile and positioning services.
Alternative signals

A new reference receiver, Jackson Labs’ PNT-5500, includes a custom Satelles/Iridium (STL) and GPS receiver, and an optional Edge Grandmaster/PTP1588 capability.
Using STL signals received directly through a small antenna mounted on the device, the PNT-5500 provides nanosecond timing synchronization in GPS-challenged environments, including deep indoors (no rooftop antenna required). It provides secure timing during GPS jamming and spoofing events. The unit is designed for high-volume, low-cost telecom small-cell synchronization, and is optionally available with holdover oscillators such as DOCXO and CSAC atomic clocks.
While GPS is vulnerable to jamming and spoofing, the PNT-5500 uses the Iridium infrastructure to provide assured timing that is impervious to spoofing and provides 1,000X higher signal strength compared to GPS, producing jamming resilience and deep-indoor reception. The system is designed to be fully interoperable with legacy equipment, for a low-cost, fully-deployed Assured PNT capability alternative to GNSS today.
Assessing vulnerability

Qascom offers several robust PNT services and products, including vulnerability assessment, robust navigation and interference localization.
Vulnerability assessment is the key proactive measure, using cutting-edge signal generators to design and test tomorrow’s receivers. For example, Qascom’s QA707 GNSS simulator tests receivers against emerging jamming and spoofing threats, allowing OEMs to discover in advance any potential vulnerability that may affect the availability and the integrity of the signal.
Robust navigation is supported by advanced mitigation algorithms, equipped with pre and post-correlation algorithms, as well as the inclusion of sensor fusion and dead-reckoning features.
Qascom’s attack detection products include external monitoring networks that support GNSS receivers. These networks provide an accurate perception of the operational environment, allowing threat characterization, classification and forecast. For instance, Qascom’s QB100 enables the simultaneous threat detection and localization by means of a monitoring cluster that delivers 24/7 situational awareness to a set of target receivers within the protection area.
Reliable timing
Meinberg provides GNSS timing solutions for nearly every application type. Its reliable systems are based on firmware built from the ground up by an in-house team of expert engineers. All Meinberg firmware is constantly checked and updated to ensure it adapts to evolving industry standards.
The company’s synchronization systems use a built-in Meinberg GPS receiver or combined GPS/GLONASS clock. They also support a broad range of reference time sources, including 1 PPS, 10 MHz, inter-range instrumentation group time codes (both direct current level shift and amplitude modulated), or network time protocol (NTP) servers. This redundancy in synchronization sources means Meinberg’s systems are protected against a loss of signal. Furthermore, to ensure the correctness of the reference time and date, an intuitive Secure Hybrid System (SHS) feature includes an independent secondary clock for enhanced plausibility checks.
For superior holdover performance, the Meinberg XHERB (with one or two Rubidium modules from Stanford Research) can be added to the Meinberg Intelligent Modular Synchronization (IMS) time and frequency systems. If the reference clock loses its sync source, the XHE chassis will provide the sync reference for the IMS chassis based on its holdover performance.
