Turf Tank is an autonomous, GNSS-guided line-marking robot built specifically to paint lines on athletic fields.
More than 550 Turf Tank robots are deployed across the United States, painting athletic fields at public schools, major colleges and universities, amateur and professional soccer clubs, local parks and recreation departments, and a two National Football League stadiums.
The Turf Tank robots can paint a full soccer field in less than 30 minutes, compared to two or three hours for manual painting. Similarly, the robot can paint a football field in two or three hours compared to eight to 10 hours to paint a football field.
The robots are eco-friendly — they’re powered by rechargeable batteries and use far less paint than most older paint machines.
Built for outdoor operations, Duro combines a rugged enclosure with centimeter-accurate positioning. Leveraging design principles typically used in military hardware, the GNSS sensor is protected against weather, moisture, vibration, dust, water immersion and unexpected circumstances that can occur in outdoor long-term deployments. In addition to its ruggedness, Duro is ready to connect right out of the box. Primary industries for this product include: robotics, precision agriculture, mapping, military, outdoor industrial and maritime.
Photo: Swift NavigationDuro incorporates:
Dual-frequency RTK GNSS
Tough, military-grade hardware
IP67 rating
Weatherproof external enclosure design with M12 standard-sealed connectors
On-board MEMS IMU and magnetometer
Future-proof hardware with in-field software upgrades
Protected IO, including RS232 Serial Ports, 100mbit Ethernet, Event Inputs, PPS, PV, CANBus
VectorNav Technologies, a provider of embedded navigation solutions, announced at AUVSI’s Xponential that it will supply its surface mount VN-100 inertial measurement unit/attitude and heading reference system (IMU/AHRS) to Neya Systems for a custom version of that company’s UxAB module.
The back-packable Advanced Explosive Ordnance Disposal Robotic System (AEODRS) with integrated Neya Systems’ UxAB module. Photo: VectorNav
Neya Systems will in turn deliver its custom version of the UxAB platform to Northrop Grumman for that company’s Advance Explosive Ordnance Disposal Robotic System (AEODRS) Increment 1 delivery, an autonomous bomb-disposal robot, to the U.S. military. The AEODRS unmanned ground vehicle “back-packable” increment 1 system weighs less than 35 pounds and comprises the handheld operator control unit, communications link, mobility capability module, master capability module, power capability module, manipulator capability module, end effector capability module, visual sensors capability module, autonomous behaviors capability module and other minor components.
The UxAB is a a fully self-contained semi-autonomy and autonomy capability module that includes GPS waypoint navigation, multi-joint manipulator control (with self-collision avoidance), retrotraverse, return-to-comms and optional obstacle avoidance behaviors.
About the size of a postage stamp, VectorNav’s surface mount VN-100 is a temperature calibrated MEMS-based IMU/AHRS that includes 3-axis accelerometers, gyros and magnetometers. The module delivers to users a real-time 3D orientation solution that is continuous over the complete 360 degrees of motion at rates of up to 400 Hz. In addition to calibrated IMU and AHRS functionality, the VN-100 includes VectorNav’s Vector Processing Engine (VPE), a suite of proprietary sensor fusion algorithms running onboard the sensor that deliver real-time magnetic & acceleration disturbance rejection, adaptive signal filtering, dynamic filter tuning, and on-board Hard & Soft Iron compensation.
The VN-100 surface mount module is being integrated directly into the electronics board of Neya Systems’ UxAB platform. Neya is using the calibrated pitch and roll estimates to assist in its controller functionality, for example to provide warning when the robotic module is in danger of tipping. The VN-100 AHRS magnetometer-based heading solution is used for waypoint navigation. VectorNav is providing platform specific hard/soft iron calibration expertise to ensure the magnetometer-based heading solution takes into account the magnetic signature of the UxAB module and provides accurate navigation in a variety of environmental conditions.
AEODRS is the next generation of Explosive Ordnance Disposal robotic systems, designed as a follow-on and capability upgrade to existing deployed platforms. AEODRS is based on an open architecture, and Neya’s Autonomy Module will conform to the logical, electrical, and physical interfaces that are required by this architecture. Neya will be adapting its commercially available UxAB platform to comply with AEODRS Capability Module requirements.
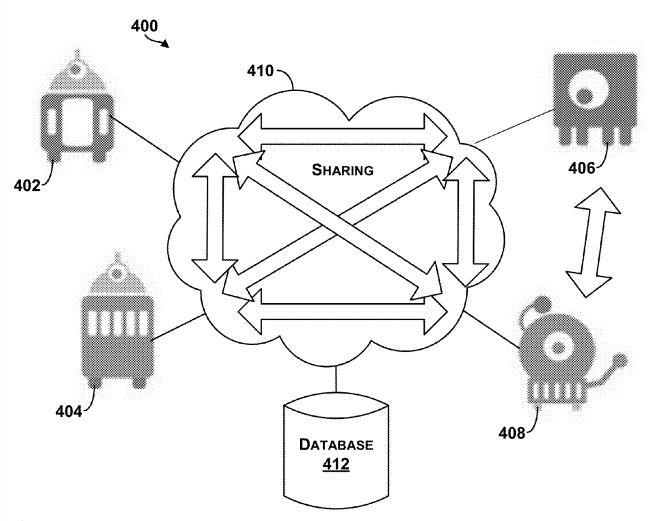
The Google patent shows an example system in which robotic devices interact with the cloud and share information with other cloud computing devices.
In a patent awarded April 14, Google describes “systems and methods for allocating tasks to a plurality of robotic devices,” reports Nextgov.com.
Google’s patent (Patent #9,008,839)outlines methods for connecting a series of robots over the cloud to complete tasks. A robotic device configured to perform a task could make use of a GPS receiver to determine its location. It might also use other sensors, such as a gyroscope or an accelerometer to measure movement. Other sensors could be encoders, infrared sensors, optical sensors, biosensors, Radio Frequency identification (RFID) systems, wireless sensors and compasses.
The patent suggests that the robots could be controlled by a smartphone — from anywhere in the world.
The patent could have value for Google’s self-driving car project, allowing the vehicles to communicate with each other.
In another patent (Patent #US008996429), awarded on March 31, Google describes how a robot’s personality can be defined using sensors and the cloud. According to the patent, “methods and systems for robot and user interaction are provided to generate a personality for the robot.” One aspect includes basing the robot’s personality on identifying the user’s location.
The personality and state may be shared with other robots so as to clone this robot within another device or devices. In this manner, a user may travel to another city, and download within a robot in that city (another “skin”) the personality and state matching the user’s “home location” robot. The robot personality thereby becomes transportable or transferable.
Again, GPS is mentioned as a possible sensor for use either in the user’s smartphone, the robot, or both.
So, in the future, when you leave home, you may be able to take an interactive non-human friend along. Talk about location-based services!


 Built for outdoor operations, Duro combines a rugged enclosure with centimeter-accurate positioning. Leveraging design principles typically used in military hardware, the GNSS sensor is protected against weather, moisture, vibration, dust, water immersion and unexpected circumstances that can occur in outdoor long-term deployments. In addition to its ruggedness, Duro is ready to connect right out of the box. Primary industries for this product include: robotics, precision agriculture, mapping, military, outdoor industrial and maritime.
Built for outdoor operations, Duro combines a rugged enclosure with centimeter-accurate positioning. Leveraging design principles typically used in military hardware, the GNSS sensor is protected against weather, moisture, vibration, dust, water immersion and unexpected circumstances that can occur in outdoor long-term deployments. In addition to its ruggedness, Duro is ready to connect right out of the box. Primary industries for this product include: robotics, precision agriculture, mapping, military, outdoor industrial and maritime.
 About the size of a postage stamp, VectorNav’s surface mount VN-100 is a temperature calibrated MEMS-based IMU/AHRS that includes 3-axis accelerometers, gyros and magnetometers. The module delivers to users a real-time 3D orientation solution that is continuous over the complete 360 degrees of motion at rates of up to 400 Hz. In addition to calibrated IMU and AHRS functionality, the VN-100 includes VectorNav’s Vector Processing Engine (VPE), a suite of proprietary sensor fusion algorithms running onboard the sensor that deliver real-time magnetic & acceleration disturbance rejection, adaptive signal filtering, dynamic filter tuning, and on-board Hard & Soft Iron compensation.
About the size of a postage stamp, VectorNav’s surface mount VN-100 is a temperature calibrated MEMS-based IMU/AHRS that includes 3-axis accelerometers, gyros and magnetometers. The module delivers to users a real-time 3D orientation solution that is continuous over the complete 360 degrees of motion at rates of up to 400 Hz. In addition to calibrated IMU and AHRS functionality, the VN-100 includes VectorNav’s Vector Processing Engine (VPE), a suite of proprietary sensor fusion algorithms running onboard the sensor that deliver real-time magnetic & acceleration disturbance rejection, adaptive signal filtering, dynamic filter tuning, and on-board Hard & Soft Iron compensation.