A specialist team at the University of Wisconsin-Madison (UW-Madison) used the Routescene UAV lidar system to detect and visualize forests in Northern Wisconsin, United States, as part of the CHEESEHEAD project. The objective of the project is to improve weather forecasting by understanding how vegetation and forests influence the atmosphere. This information will be used by decision makers to develop policies that more effectively enable carbon emission reductions.
Project overview
The CHEESEHEAD project (The Chequamegon Heterogeneous Ecosystem Energy-balance Study Enabled by a High-density Extensive Array of Detectors) studies interactions and feedback between the land surface and atmosphere and how these results can be used to improve weather and climate models. Ultimately, the results will enable better carbon-emission reduction policy making.
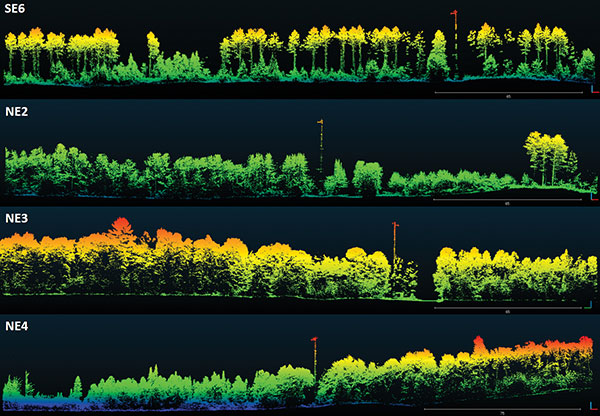
Visualization of dominant tree structures in Northern Wisconsin around the flux towers. (Image: Routescene)
The UAV Lidar Surveys
The UW-Madison team collected high density 3D point-cloud data of the prominent tree species in Wisconsin’s Chequamegon-Nicolet National Forest. Routescene’s drone-mounted lidar system captured the full tree structure, from the tree canopy to ground-level vegetation.
UAV lidar works well to quickly and efficiently survey and represent the type, shape and composition of a forest canopy. Surveys were carried out around eleven 100-foot flux towers within areas that ranged from 0.25 km² to 1 km². Six forest types were identified that included aspen, pine, poplar, larch, cedar and hardwood.
“The tall canopy of 20–30 m height created difficult flying conditions,” said Christian Andresen, UW-Madison. “It was difficult to keep a visual line of sight, so we decided to fly smaller 500 m x 500 m flights to keep sight of the drone.”
The Routescene lidar system includes a 32-laser lidar sensor providing a scan rate of up to 1.4 million points per second. Point-cloud density averaged 600 points per meter squared with a vertical accuracy of 2–5 cm.
“The Routescene system worked flawlessly and we achieved all we had planned. Over the three days, our crew of two covered a total of 4.2 km²,” Andresen said. “We were particularly impressed with the density of overlapping flight lines and the mapping of the forest structure.”
This project contributed to the wider CHEESEHEAD experiment to generate knowledge that advances the science of surface flux measurement and modelling, relevant to many scientific applications such as numerical weather prediction, climate change, energy resources and computational fluid dynamics.
A roundup of recent products in the GNSS and inertial positioning industry from the December 2020 issue of GPS World magazine.
OEM
Inertial system
Ready for UAVs, robotics
Photo: Inertial Labs
The INS-DU is a high-performance strapdown inertial navigation system (INS) that determines position, velocity and absolute orientation of a platform it is mounted to. Its dual-antenna u-blox receiver provides 1-cm real-time kinematic (RTK) position from RTCM 3 RTK corrections and supports multiple GNSS constellations. Designed for UAVs, land vehicles and marine vessels, the INS-DU uses a range of aiding data to deliver a highly accurate solution for GNSS-denied environments. It uses a miniAHRS with 3-axes each of precision magnetometers, accelerometers and gyroscopes to provide orientation. It contains algorithms for the motion of robots, autonomous vehicles and antennas.
The high-accuracy tactical-grade STIM277H gyro module and STIM377H inertial measurement unit (IMU) were designed to meet space segment needs. Both have hermetic aluminum enclosures, and all parts are tested for fine and gross leak to conform to MIL-STD-883J, Class H. While a commercial off-the-shelf (COTS) product, Sensonor has carried out extensive radiation characterizations. The design is tested for a 20+ years operating life through high-temperature operating life (HTOL) testing. Backwardly compatible with Sensonor’s other IMU and gyro modules, STIM277H and STIM377H are designed for satellite attitude and orbit control systems (AOCS), launchers, portable target acquisition systems, UAV payloads, land navigation systems, turret stabilization, missile stability and GNSS-supported navigation systems.
The AsteRx-m3 family features GPS/GNSS OEM boards optimized for power consumption and ease of integration. An easy-to-integrate design enables short set-up times and faster time-to-market. The AsteRx-m3 offers multi-frequency, multi-constellation positioning combined with Septentrio’s GNSS+ technology while optimizing power. The AsteRx-m3 Pro rover receiver tracks signals from all available GNSS constellations on three frequencies, and operates both in single- and dual-antenna modes. The AsteRx-m3 ProBase is designed to operate as a reference station for RTK and PPP-RTK networks. The AsteRx-m3 Pro+ is a full-feature OEM receiver board flexible enough to fit into any application and to be used either as a rover or a base station in a single- or dual-antenna mode.
New anti-jamming antennas available are the QR200 GPS dual-frequency L1/L2 anti-jamming antenna, the QR201 GNSS multi-frequency band anti-jamming antenna, and the QR202 GNSS multi-frequency band anti-jamming antenna with additional L-band reception (1520–1560 MHz). All models provide robust GPS or GNSS navigation and block intentional jamming and unintentional RF interference timing or 3D positioning. All three are lightweight (230 grams for the QR1xx series and 500 grams for the QR2xx series) with low power consumption (1–1.5W typically, depending on configuration), and can be mounted on any platform (cars, poles, drones, etc.).
The Vision-RTK positioning sensor is a compact centimeter-accurate solution with high reliability and availability in challenging environments. The module integrates two real-time kinematic (RTK) GNSS receivers and visual inertial navigation. Its sensor-fusion algorithm is based on deep integration of GNSS, camera and inertial sensors. Real-time sensor fusion provides centimeter-accurate absolute positioning in any outdoor environment.
Deploying ground control targets on accurately surveyed ground control points (GCP) assures that a UAV lidar survey has been properly executed. UAV lidar surveys are typically undertaken in remote, rural and sometimes hazardous locations where no fixed points are available, such as solid surfaces or concrete features. Routescene’s GCPs are raised from the ground using a mini tripod. A built-in bubble level enables accurate leveling and removes the need for a tribrach. Robustly engineered, the targets stay in position during adverse and windy conditions, reducing the risk of repositioning during a survey. They are covered with highly retro-reflective material to provide high-intensity returns. As a result, the targets are easily identifiable and can be automatically extracted from the geo-referenced point cloud.
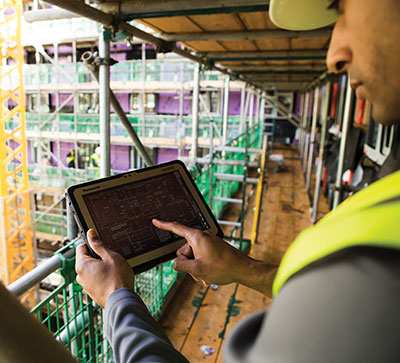
The Toughbook A3 Android tablet is aimed at the mobile workforce. It has an outdoor viewable screen and patented rain-touch functionality. With a 10.1-inch screen and 6-foot drop rating, the A3 enables users across industries to tackle tough jobs and critical applications. The Qualcomm SDM660 chipset, which supports BeiDou, Galileo, GLONASS, GPS, BeiDou QZSS and SBAS. 4G LTE Band 14 EM7511 multi carrier mobile broadband with GPS. The tablet has a powerful octa-core processor, an optional integrated barcode reader, an insertable smart card reader and an insertable stylus. The A3 has a 5-foot drop rating and IP65 certification for dust and water resistance.
Veronte Autopilot 1X is a miniaturized avionics system for advanced control of unmanned systems. The control system embeds a suite of sensors and processors with datalink radio, with reduced size and weight. The control system Veronte Autopilot 1X adds fully autonomous control capabilities to any unmanned system for complete operation. The Veronte control system is fully configurable for payload, platform layout, control phases and control channels. It uses real-time kinematic (RTK) positioning and provides cloud connectivity, sense-and-avoid support, electromagnetic interference and vibration isolation.
The Astro commercial drone platform is equipped with Freefly’s multi-band, real-time kinematic (RTK) system, which provides centimeter-level precision with a u-blox F9P GNSS module. The drone is equipped with a 60-megapixel Sony camera. A customized version of Skynode powers each Astro, providing LTE connectivity, an onboard Linux mission computer, and seamless connectivity to Auterion Mission Control and Cloud Suite. The Auterion ecosystem provides robust, secure and scalable drone planning, flight and compliance management solution.
The guidance system AgPilotX for aerial applicators uses three wireless components: a GPS/GNSS lightbar, a hub and an Apple iPad. The smart components run off their own computer, communicating to each other wirelessly. The AgPilotX Smart Lightbar has onboard GPS+GLONASS as well as a GNSS antenna, so there is no need to run an antenna up to the aircraft canopy. The Lightbar logs the data, while a hub connects the switches (swath advance, swath decrement, spray on/off) and peripherals, and an iPad runs the interface software through an Apple App. All logs are saved as unique jobs and can be returned to at any time. The lightbar is not dependent upon the iPad to operate and will continue to work the active job even if you start using a different App or even shut the Apple device completely off.
Insero, inserosolutions.com
Antennas
High accuracy for autonomous vehicles, robotics
The Colosseum X XAHP.50 antenna. (Photo: Taoglas)
Two new active, multiband GNSS antennas are engineered for applications that require critical high-accuracy positioning and timing, including autonomous driving and precision agriculture. The MagmaX2 AA.200 is designed for space- and weight-constrained applications, such as robotic lawnmowers. Embedded versions are also available. It is a low-profile active multiband GNSS magnetic mount antenna for use across most major constellations including GPS (L1/L2/L5), GLONASS (G1/G2/G5), Galileo (E1/E5a/E5b) and BeiDou(B1/B2). The Colosseum X XAHP.50 is a geodetic-quality small-dome antenna suitable for a vehicle roof mount or pole mount. It is engineered to operate with high-precision capabilities on the full GNSS spectrum. Sub meter positional accuracy better than 55 cm is achievable, even without the use of RTK correctional services.
Professor Tom Scott, from the School of Physics at the University of Bristol, U.K., led a group of researchers from NCNR to conduct surveys on multiple sites of interest, including the Buriakivka village, a settlement abandoned following contamination from the power plant accident, and the “Red Forest,” a natural woodland area located the closest to the reactor.
Working closely with local Ukrainian authorities, the team operated unmanned aerial vehicles (UAVs) — Routescene’s LidarPods flown on DJI M600 hexacopter drones — to perform a series of radiation mapping surveys over the course of 10 days.
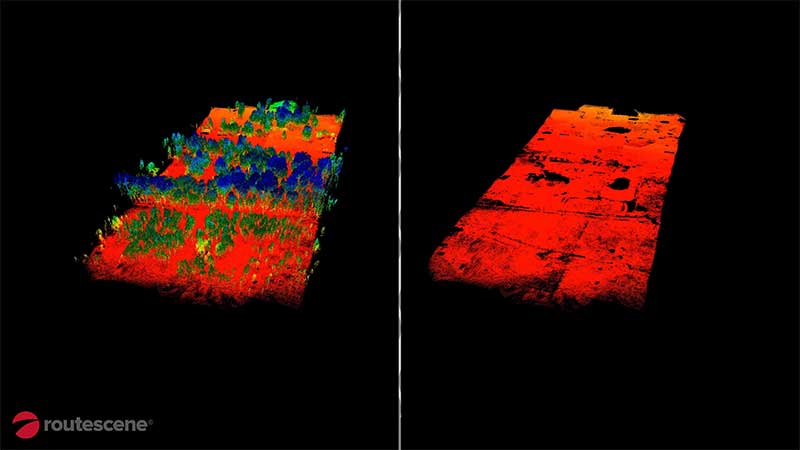
According to Routescene, the point cloud data collected was processing using its LidarViewer Pro software to generate a detailed digital terrain model. It was then overlaid with the results from a gamma spectrometer survey, undertaken to measure radiation intensity, to locate the exact sites of the radiation hotspots.
“The algorithm converts the aerial radiation intensity recorded by a UAV survey into a ground intensity map,” said Kieran Wood, senior research associate at the University of Bristol. “This process is heavily affected by the distance between the airborne radiation sensor and the ground/buildings. Hence, high accuracy lidar-based models were essential.”
Photo: Routescene
Results
While the general widespread radiation contamination in the Red Forest was already known, the results revealed that the radioactivity was unevenly disturbed. Although radiation intensity had reduced in some areas, other areas remain highly contaminated confirming continued danger to anyone accessing those areas, Routescene reported.
In addition, the researchers detected one unexpected hotspot in the ruins of a facility that was used to separate contaminated waste during clean-up efforts immediately after the accident.
This expedition was the first in a series of surveys NCNR will conduct in Ukraine over the next year. The new maps will help officials prevent risks to visitors to the area and the full results will be published soon, Routescene said.
Routescene has jointly developed with Hanseatic Aviation Solutions an integrated fixed-wing UAV and LidarPod solution for surveying.
Following in-depth customer research, Routescene identified a gap in the market for an unmanned aerial 3D mapping solution capable of flying long distances, particularly for use in large countries with great expanses of remote land such as Australia, the United States, Canada and Eastern Europe. The integrated solution would be used for long-distance surveys, such as powerline inspections in the utilities sector, biomass mapping of forests and geophysical surveys.
The successful maiden flight of the integrated Hanseatic S360 and Routescene LidarPod took place in July in Bremen, Germany, and demonstrated its capability by collecting sample data. German aviation authorities were so confident in the product, they gave Routescene permission to fly in the same circuit as manned aircraft.
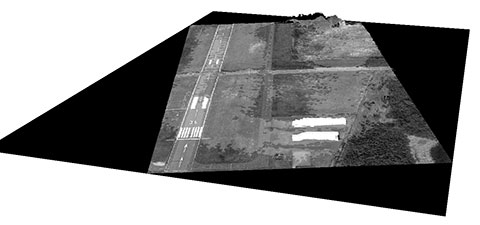
A 3D point cloud of the runway at Bremerhaven Airport.
Benefits
The LidarPod is integrated internally within the S360 itself, rather than being wing-mounted, reducing drag and enabling longer flight and survey times. Integration of the LidarPod into the nose cone minimizes noise and vibration traveling from the rear-mounted engine, ensuring the GNSS/INS is not adversely affected. It also enables more accurate positioning.
The S360 is fixed-wing and built for long-distance flights, with four-hour endurance in the standard configuration, along with long-range telemetry, an autopilot system and a mission planning tool. It works in up to Force 7 winds, extending the operational window in which surveys can be performed. Its significant payload capacity enables the integration of additional survey and geophysical sensors as well as the LidarPod. Because this is an internally integrated solution, it can be set up rapidly and is easy to deploy in the field, Routescene said.
Michael Schmidt, managing director of Hanseatic Aviation Solutions, and Gert Riemersma, CEO of Routescene, met for the first time at INTERGEO 2014. They immediately understood the potential power of a collaboration.
Routescene launched the LidarPod at that trade show. It quickly attracted wide interest and is now generating business across four continents, Routescene said.
After exploratory discussions with clients, the companies started development of the system in earnest at the start of 2015. “We have already seen significant interest from the forestry and geophysical exploration community,” Riemersma said.
The Routescene LidarPod 3D mapper, a self-contained turnkey solution new to the market, is being showcased for the first time in the United States at the International Lidar Mapping Forum in Denver, Colo., Feb. 23-25. Routescene is based in Edinburgh, United Kingdom.
The flexible LidarPod was developed for use on unmanned aerial vehicles, but can also be fitted onto any mobile platform such as a car or boat. The flexibility makes it attractive for many sectors and situations where accurate mapping is essential but difficult to achieve, enabling surveys to be conducted in areas that previously would not have been considered, Routescene said.
The technology offers a non-intrusive method to obtain detailed and precise geo-referenced 3D datasets, Routescene said. LidarPod 3D can be used for 3D mapping; powerline inspection; scoping, planning and management of mines; forestry design, management and operation; large-scale topographic surveys; and city planning and management.
Routescene LidarPod costs less than a vehicle-based mobile mapping system, Routescene said. The turnkey solution includes LidarViewer, specially developed software to turn the raw data into valuable business information. It enables users to convert, analyze and filter huge volumes of point cloud data to improve productivity and workflow. Powerful filters enable users to extract relevant data for use in third party software, such as GIS and CAD packages, which are unable to cope with such large data volumes.