“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Free navigation history course
Photo: Harvard University
Harvard University offers PredictionX: Lost Without Longitude, a free online course that examines the evolution of navigation from ancient methods to modern technologies. The program explores the science and history of navigation, focusing on the challenges of determining longitude before GPS existed. It highlights key advancements, such as John Harrison’s marine chronometer and the Longitude Prize. Through multimedia content — including videos, infographics and Worldwide Telescope tours — the course is designed to demonstrate how centuries of advancement in navigation enabled humanity to achieve milestones such as landing on the moon.
Self-driving cars collect geospatial data
Photo: Finnish Geospatial Research Institute
In Finland, self-driving cars are being used to collect geospatial data to address urban challenges. The ARVO autonomous vehicle from the Finnish Geospatial Research Institute is equipped with high-precision sensors that map its environment in real-time, collecting information on road conditions, urban vegetation as carbon sinks and factors influencing flood risks. In partnership with Aalto University and funded by the European Regional Development Fund, this initiative seeks to explore various uses of this data, such as city planning, environmental monitoring and infrastructure management.
Stopping scammers
Photo: Carlos Alvarez / iStock Editorial / Getty Images Plus / Getty Image
Google has taken legal action against a network of scammers responsible for creating more than 10,000 fake business listings on Google Maps. The scammers fabricated profiles targeting urgent service industries and bolstered them with fake reviews to appear credible. Victims were misled into contacting these fake businesses, which then sold their personal information as “leads” to legitimate service providers without consent. Google has removed the fake listings and is suing individuals involved in the scheme, CBS News reported.
Mapping Uganda’s disappearing tropical glaciers
Photo: guenterguni / E+ / Getty Image
Project Pressure, in collaboration with UNESCO and the Uganda Wildlife Authority, conducted an expedition to the Rwenzori Mountains to map the region’s disappearing tropical glaciers. The team created the first 3D model of Mt. Stanley’s glaciers and installed monitoring equipment, revealing that Mt. Speke and Mt. Baker have lost their glaciers entirely, while the Stanley Plateau Glacier has shrunk by 29.5 percent since 2020 and is heavily fragmented. The project aims to continue monitoring the glacial retreat, develop mitigation strategies and engage the local community in ongoing research.
While on public roads self-driving cars are still years away, autonomous systems are already common in much less congested and/or much more controlled environments — such as farm fields, ports, mines, rivers, and in the air — where the risk of a collision causing injuries or fatalities is smaller by orders of magnitude. From unmanned aerial vehicles (UAVs) taking aerial photographs, to unmanned ground vehicles (UGVs) spraying vineyards, to unmanned surface vessels (USV) conducting hydrographic surveys, autonomous or semi-autonomous systems are generally much safer, more efficient, and cheaper to operate than their manned counterparts.
Whether they have wheels, hulls, or wings to properly perform their tasks, autonomous systems need to know — with great accuracy — their position, heading and attitude (roll, pitch, yaw, surge, sway, and heave). For example, to spray grapes in a vineyard, an autonomous system needs to know not only its exact position but also whether it is level or tilted to one side due to uneven terrain, lest it spray the ground or into the air instead of the grapes. Similarly, a survey vessel’s pitch, which depends on its speed through the water, and its roll, due to waves and wind, affect the direction of its sonar beams.
Knowing a platform’s position, heading and attitude requires tight integration of the outputs of GNSS receivers and inertial navigation systems (INS). This enables autonomous systems to compensate for their movements — either physically and in real time, by orienting their sensors or tools, or in software when post-processing the data they collected.
The following three case studies sample current developments in autonomous systems on land, in the air, and on the water.
How Inertial Systems and GNSS Availability Will Help
Innovation Insights with Richard Langley
ARE WE THERE YET? This was a familiar refrain from the backseats of parents’ cars when traveling to a holiday destination or to grandparents when I was growing up. We didn’t have videos on a display attached to the seats in front of us or (who could imagine?) our own personal communication device on which we could call up games, movies or social media channels.
But I’m not talking about that complaint from our childhoods. I’m asking if we have arrived at the era of the self-driving car. The answer is yes and no. It all depends on what you mean by “self-driving.” We reviewed some of the technologies needed for self-driving or autonomous vehicles in this column in June 2019. And we indicated in the introduction to that column that vehicle autonomy has several levels. SAE International, formerly known as the Society of Automotive Engineers, has defined six levels of autonomy that can be briefly described as Level 0 – no automation; Level 1 – hands on/shared control; Level 2 – hands off; Level 3 – eyes off; Level 4 – mind off; and Level 5 – steering wheel optional.
Already, Level 1 automation is widely available in modern cars with adaptive cruise control, parking assistance, lane-keeping assistance and automatic emergency braking among the features being offered. Level 2 automation, where the automated system takes full control of the vehicle’s acceleration, braking and steering, is available in some production models, although the “hands-off” designation is not to be taken literally — most motor vehicle laws require drivers to keep their hands on the steering wheel. Between Level 2 and Level 3, we have conditional automation — the car can drive itself, but the driver must stay alert and be prepared to take over immediately. Level 3 is high automation, where a computer fully drives the car at certain times on certain routes such as a highway; while the driver can perform other tasks such as reading a book, they must be prepared to take over operation of the vehicle within a few seconds if alerted by the automated system. While test campaigns are still ongoing, some jurisdictions permit Level 3 operation by ordinary drivers on some roads, and customers will soon be able to buy vehicles with this level of automation. Widespread use of Level 4 and Level 5 automation is further off (some would say quite a way off) and remains in development. But famously, last year, Toyota operated Level 4 self-driving shuttle vehicles around the Tokyo 2020 Olympic Village.
A lot more work needs to be done before we will have arrived at the era of the fully self-driving car that will be able to travel on any road, anywhere in the world, all year around, in all weather conditions. In particular, self-driving cars in urban environments (as opposed to highway driving) can be problematic. The required multi-sensor automated systems will include GNSS, but buildings block and reflect GNSS signals, reducing system availability and accuracy. In “Innovation” this month, researchers from the Illinois Institute of Technology report on how inertial navigation systems coupled with wheel-speed sensors and vehicle dynamic constraints can help.
By Kana Nagai, Matthew Spenko, Ron Henderson and Boris Pervan
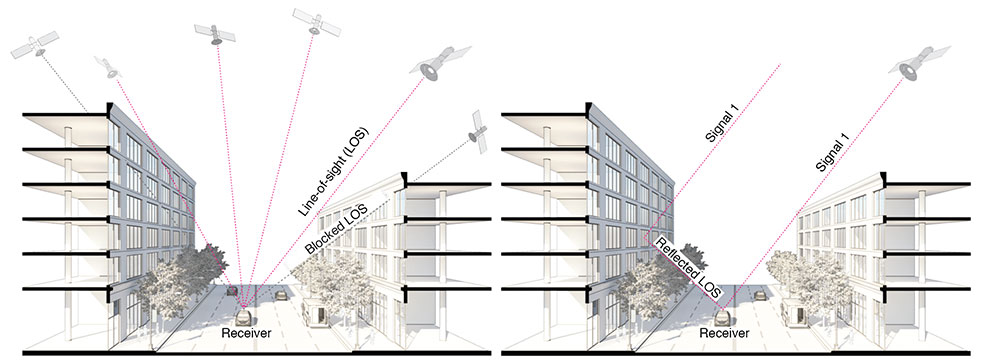
GNSS provides navigation services globally, but satellite visibility in urban areas is limited by high-rise buildings. This creates a mixture of GNSS available and denied environments (see FIGURE 1) — users do not generally know where the system can maintain sufficient levels of accuracy and integrity for a particular application. To begin to address the issue for self-driving cars, we evaluated GNSS-only availability in downtown Chicago.
FIGURE 1 . The figure depicts three types of potential GNSS signal reception: direct LOS signals and blocked LOS signals (left) and reflected LOS signals (right). (Image: Authors)
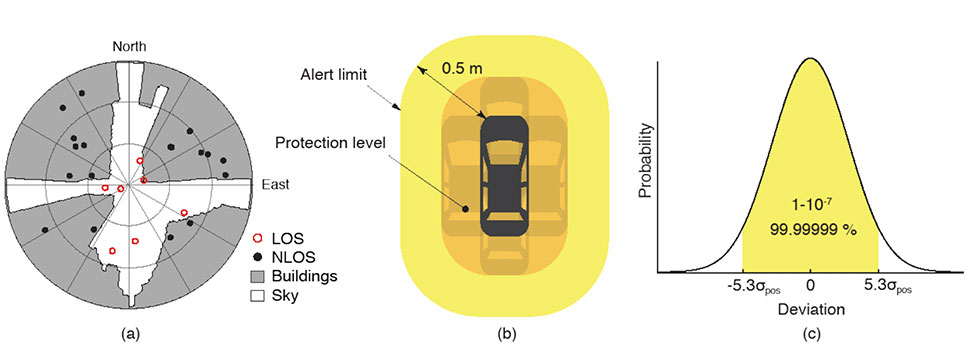
GNSS signal prediction in urban environments has been conducted in previous work. For example, the concept of “shadow matching” was developed to identify GNSS signal blockages in urban canyons. Overlaying sky plots on a hemispherical sky view can be used to distinguish between line-of-sight (LOS) and non-line-of-sight (NLOS) signals (see FIGURE 2a). Reflected rays can be predicted using Householder transformations to reveal potential multipath conditions. Satellites producing blocked or reflected (NLOS) signals should be excluded to maintain integrity.
FIGURE 2. (a) A hemispherical sky view in an urban environment. (b) Illustration of a protection level and an alert limit. To ensure integrity, the protection level must not exceed an alert limit. (c) The allowable probability of exceedance is assumed to be 10−7 in this work. (Image: Authors)
When the number of visible satellites is greater than three, GNSS can resolve vehicle position. However, even in cases where enough satellites are visible, the satellite geometries are generally weak because the dilution of precision (DOP) is adversely affected by the buildings partially blocking the sky. Horizontal positioning error must be bounded by a protection level computed by the vehicle. Then, for navigation to be deemed available, the protection level must not exceed a required alert limit (see FIGURE 2b). The maximum allowed probability of exceedance (see FIGURE 2c) and the alert limit can together be used to determine the maximum allowable position error standard deviation.
Even if the protection level is far below the alert limit in an open-sky environment, it will frequently exceed the alert limit once the vehicle enters a city. GNSS alone is generally not able to maintain availability, so integration with other sensors is needed. Tightly coupling inertial navigation systems (INS) with GNSS using the extended Kalman filter (EKF) provides better estimation in urban environments. The EKF algorithm also enables integration of wheel-speed sensors and vehicle dynamic constraints. These integrated navigation systems will improve availability, but it is still unclear how long such a system can be expected to maintain fault-free integrity in a congested city.
Focusing on the problem of self-driving cars in urban environments, we evaluate protection levels of navigation with practical integrated sensors: GNSS, INS, a wheel-speed sensor (WSS) and vehicle dynamic constraints (VDC). The goal is to develop the means by which we can determine locations where external ranging sources (such as lidar) are needed to maintain continuous navigation with fault-free integrity.
GNSS-ONLY AVAILABILITY
For GNSS availability evaluation, we assume an integrity requirement that the probability of exceeding a 0.5-meter alert limit must be lower than 10−7. The 0.5-meter alert limit therefore corresponds to approximately five times the position standard deviation, so the maximum allowable position error standard deviation is then approximately 0.1 meters. Accuracy at this level clearly requires differential GNSS carrier-phase measurements. We assume a nominal GNSS double difference (DD) carrier ranging error standard deviation of approximately 0.02 meters, and that carrier cycle ambiguities can be readily resolved in an open-sky environment prior to initiation of vehicle motion.
Given the assumptions made of the maximum allowable position error standard deviation and the GNSS ranging error standard deviation, the maximum allowable horizontal dilution of precision (HDOP) is about 5.
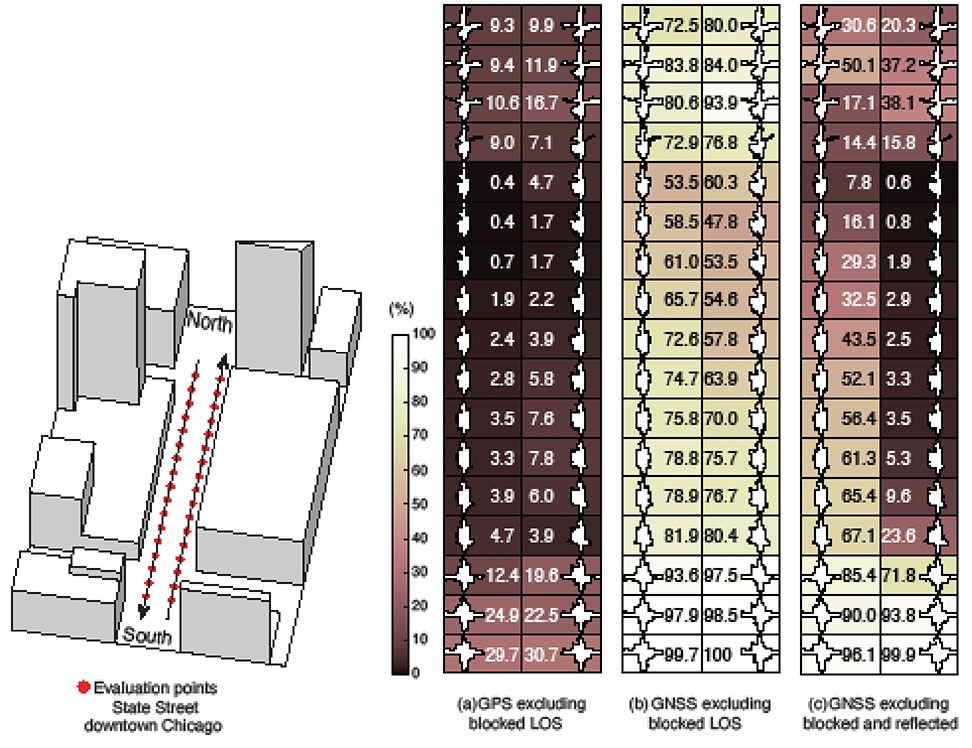
FIGURE 3 shows GPS and GNSS availability — the fraction of time the HDOP requirement is met over 24 hours — along a section of State Street in downtown Chicago. The availability results using GPS only and excluding only blocked LOS signals ranged from 0% to 9% along the block and 9% to 30% at the intersections (see FIGURE 3a). Using four full GNSS constellations (GPS, Galileo, GLONASS and BeiDou), availability ranged from 48% to 82% along the block and 72% to 100% at the intersections (see FIGURE 3b).
FIGURE 3. The percentage of GPS or GNSS availability in 3D-mapped downtown Chicago. We exclude satellites producing blocked LOS signals or both blocked and reflected LOS (NLOS) signals from the measurements. Each column expresses a lane of southbound or northbound travel. The availability is the percentage of total time when HDOP meets the self-driving car integrity requirements in 24 hours. (Image: Authors)
When we also excluded satellites producing reflected LOS signals that reach the vehicle, the availability dropped significantly at every point (see FIGURE 3c). We assert that FIGURE 3c expresses the reality of GNSS availability because building-reflected multipath signals degrade positioning accuracy and would affect integrity negatively. It’s obvious from these results that GNSS alone is insufficient to meet the autonomous driving requirements in an urban environment, and multi-sensor integrated navigation systems are needed to augment poor GNSS signal availability.
MULTI-SENSOR INTEGRATION
We begin by considering tightly coupled INS/GNSS integration using an EKF, and then integrate a realistic sensor suite including WSS and vehicle dynamic constraints that enforce resistance to lateral sliding and vertical movement. If it is known from another source that the vehicle is not moving (for example, it is in the parking gear), a static mode constraint (SMC) can also be applied.
INS/GNSS Integration. Tightly coupled INS/GNSS integration with an EKF uses the INS measurement to predict vehicle motion. The continuous process model uses a state vector having the position in the navigation frame, the velocity, the attitude, bias errors and cycle ambiguities, with the input vector having accelerometer-specific force measurement in the body frame and gyro-rotation-rate measurements. A white-noise vector drives the inertial measurement unit (IMU) states.
The GPS/GNSS measurement model includes the measurement vector having carrier and code phases, and the observation matrix containing LOS vectors and the vector of white receiver thermal noise.
INS/GNSS/WSS/VDC Integration. For the vehicle in motion, we developed a model consisting of a WSS measurement in the along-track direction, a non-holonomic constraint resisting lateral sliding, and a holonomic constraint on vertical movement (see FIGURE 4).
The INS/GNSS/WSS/VDC integration using the EKF consists of the process model and the measurement models.
INS/GNSS/SMC Integration. The static mode constraint provides zero-velocity measurements to the EKF measurement update to mitigate position error propagation. We use SMC only when it is known that the vehicle is not moving; for example, when the vehicle is in the parking gear.
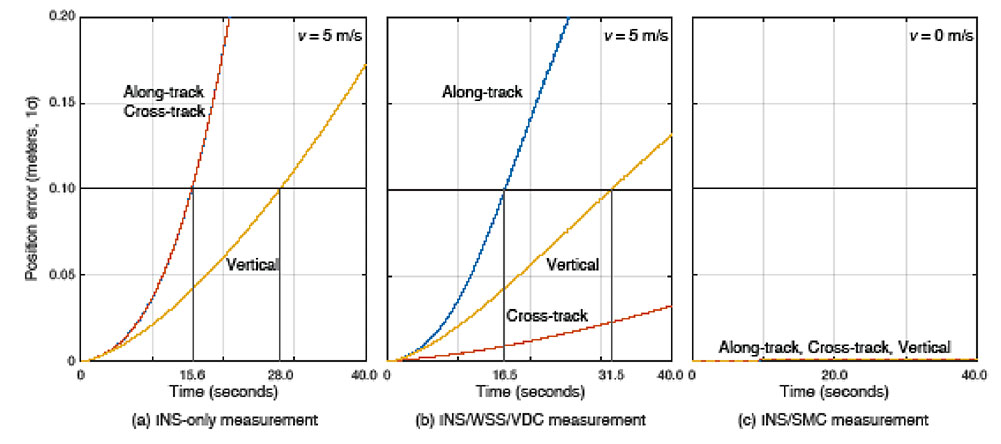
Error Propagation Analysis. We tested the time from perfect initialization to when position error exceeds 0.1 meters in GNSS-denied environments. FIGURE 5 shows the error growth in the along-track (x), the cross-track (y) and the vertical (z). The error specifications for a STIM300 tactical-grade IMU are used in this analysis. The standard deviation of the WSS measurement noise is assumed to be 0.05 meters per second, and the standard deviation of the movement constraint violations is 0.001 meters per second. The vehicle is moving at 5 meters per second except when we test the SMC.
FIGURE 5. The vehicle position error growth vs. time in the along-track (x), cross-track (y) and vertical (z) directions. Each graph represents the navigation system introduced in the multi-sensor integration section. The vehicle is moving at 5 meters per second (a and b) or 0 meters per second (c). (Image: Authors)
The INS can coast 15.6 seconds before the position error standard deviation exceeds 0.1 meters in both the along-track and the cross-track directions (see FIGURE 5a). The INS/WSS/VDC can coast 16.5 seconds in the along-track direction, and significantly more than 40 seconds (the simulation duration) in the cross-track direction (see FIGURE 5b). In static mode, INS/SMC estimate errors do not grow with time in any direction, as expected (see FIGURE 5c). In GNSS-denied environments, the non-holonomic constraint suppresses the cross-track position error, but the WSS measurement hardly affects the along-track position error. The SMC works perfectly, but the usage is limited to when the vehicle is known to be stationary.
SIMULATION SCENARIO
We imagine a future driverless-car mission scenario in which multi-sensor navigation systems are practicable. To minimize congestion in a city, autonomous vehicles will be held outside the urban core when not in use. In the clear open-sky environment, a vehicle in a parking lot completes GNSS initialization using the INS/GNSS/SMC system. Once requested for action, the vehicle departs for the city from the parking lot, and the motion of the vehicle improves alignment by the INS/GNSS system. Safe navigation can be ensured using the system to provide continuity under overpasses and bridges in the open-sky environment. Upon entering the urban core, navigation becomes more dependent on the INS/WSS/VDC system.
A reasonable numerical target for differential GNSS initialized position error is 0.02 meters, and for the INS alignment yaw angle error 0.1 degrees.
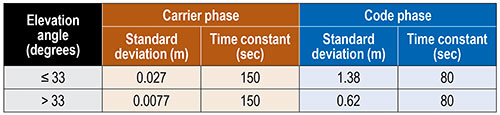
Local GNSS multipath errors from nearby vehicles will vary with the satellite elevation angle. Prior experimental results show that lower elevation-angle satellite signals (below 33 degrees) are much more likely to be impacted by multipath than higher ones (see TABLE 1).
TABLE 1. The nominal GNSS multipath error values in the simulation.
INITIALIZATION AND ALIGNMENT
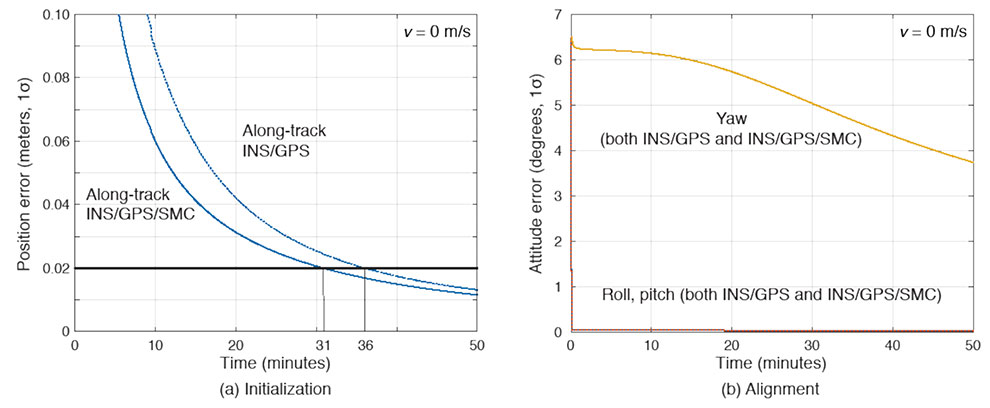
Initialization takes place in a parking lot with a clear sky view. A vehicle is in the parking gear, enabling SMC to be applied. FIGURE 6a shows a typical example: with INS/GPS/SMC, system initialization takes about 31 minutes, and with INS/GPS, about 36 minutes. Therefore, SMC does speed up GPS initialization, although the improvement is modest.
The yaw angle is not aligned during the initialization, but roll and pitch are immediately aligned (see FIGURE 6b). Earth’s gravity affects roll and pitch angle alignment but not yaw angle.
FIGURE 6. (a) Comparisons of initialization time between INS/GPS and INS/GPS/SMC in an open-sky environment. The INS/GPS/SMC system initializes rapidly. (b) Transitions of roll, pitch, yaw alignment during the initialization. Yaw angle alignment cannot be performed when the vehicle is stationary. (Image: Authors)
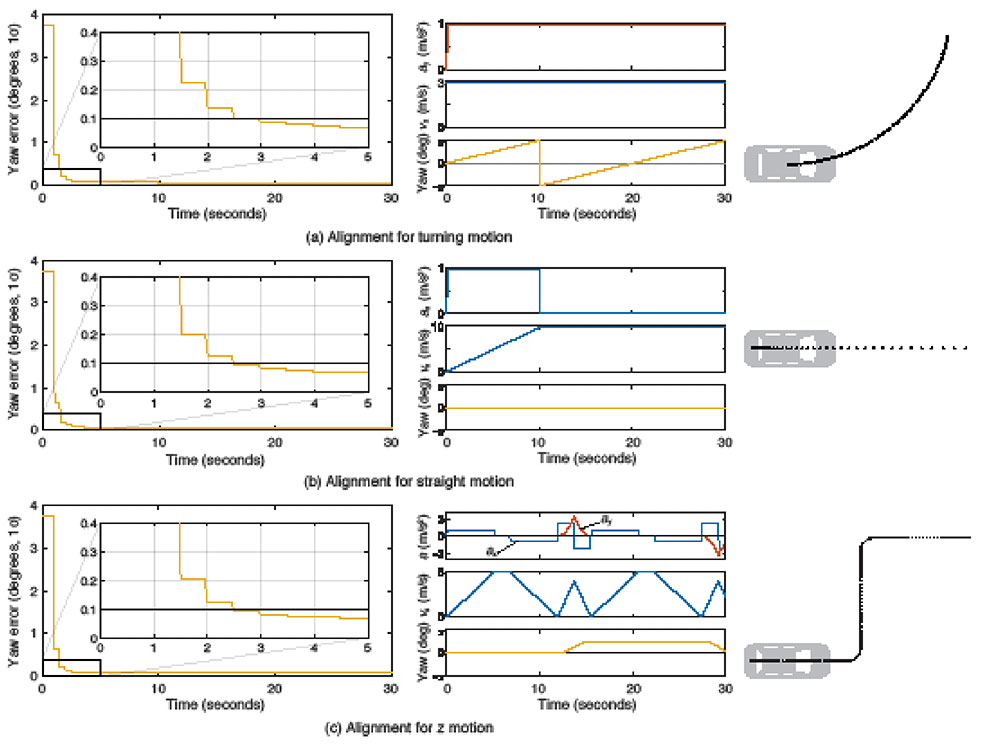
Yaw angle alignment cannot be performed when the vehicle is stationary or moving with constant velocity. Accelerated motion, either straight or turning, is required. FIGURE 7 shows the behavior of the yaw angle error standard deviation using the INS/GPS system when centripetal (see FIGURE 7a) or tangential (see FIGURE 7b) acceleration is applied. The yaw angle can be aligned in a couple of seconds for either type of acceleration. To represent typical initial motions of self-driving cars, we model a parking-lot departure via a “Z”-shaped path. In this scenario, the yaw alignment error reaches 0.1 degrees within a couple of seconds (see FIGURE 7c).
FIGURE 7. The behavior of yaw angle error when centripetal (a) or tangential (b) acceleration is applied; (c) shows the behavior while following a z-shaped path. The yaw angle can be aligned in a couple of seconds in each case. (Image: Author)
EVALUATION IN URBAN ENVIRONMENTS
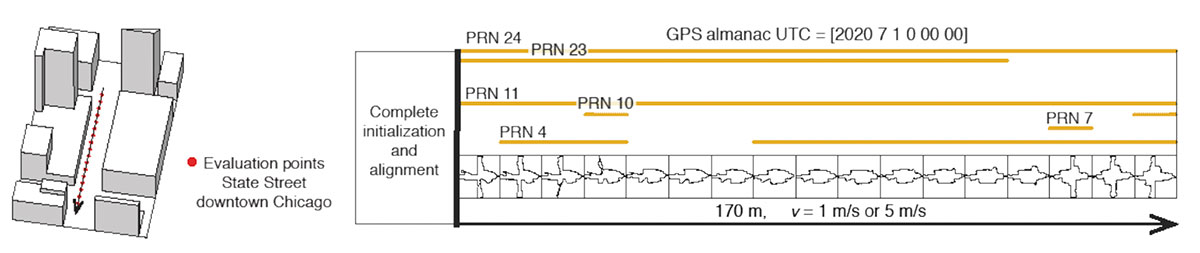
After initialization and alignment in the open-sky environment, we simulated the vehicle traveling into the urban core. The urban environment in our study is 3D-mapped State Street in Chicago, which runs north-south and transits from low-rise neighborhoods to central downtown. We selected one congested section surrounded by tall buildings and computed the position error standard deviation along the path. The evaluation points are at 10-meter intervals over a total distance of 170 meters. The yellow lines in FIGURE 8 denote the visible satellites, identified by their pseudorandom noise (PRN) code numbers, at each point. We assume for convenience that the INS/GPS system is initialized and aligned at the first evaluation point. In reality, we would expect a degraded initial condition because we are starting the simulation in an urban canyon.
FIGURE 8. Evaluation points and PRN numbers of visible satellites at each point. (Image: Author)
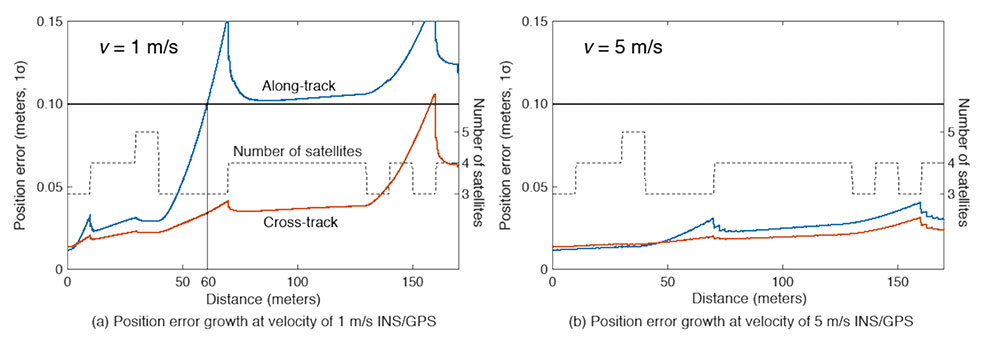
In the first simulation, the car equipped with the INS/GPS system moved either 1 or 5 meters per second. The y-axis in FIGURE 9 represents the position error standard deviation, and the x-axis represents the distance in meters. The dotted line expresses the number of visible satellites. The error when the vehicle velocity is 1 meter per second exceeded the maximum allowable position error standard deviation of 0.1 meter, at the distance of 60 meters. However, when the velocity was 5 meters per second, the maximum allowable position error standard deviation was never reached. It is also clear from the figures that error propagation is significantly affected by the number of visible satellites.
FIGURE 9. A comparison of position error growth between velocities of 1 meter per second and 5 meters per second. (Image: Author)
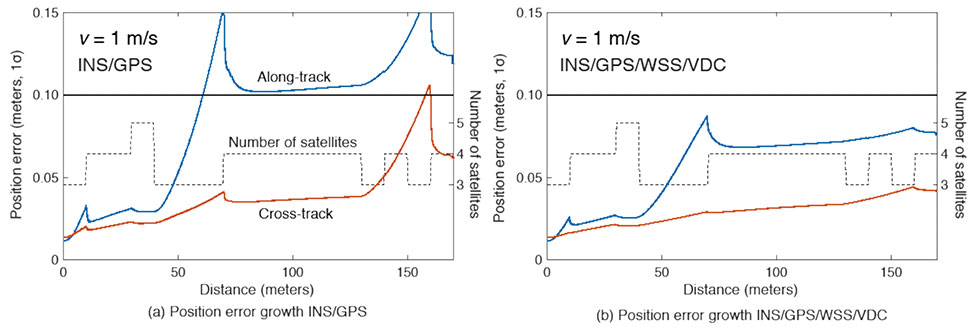
In the second simulation, we compared two different navigation systems, INS/GPS and INS/GPS/WSS/VDC. The vehicle moved at 1 meter per second in the same urban environment. The INS/GPS/WSS/VDC system does provide relief, but the error propagation is still clearly affected by the number of visible satellites (see FIGURE 10).
FIGURE 10. A comparison of position error growth between the INS/GPS and INS/GPS/WSS/VDC systems for a velocity of 1 meter per second. (Image: Authors)
In GNSS-challenged environments, INS error propagation is a function of time. When a vehicle moves faster, it clears the blockage area more quickly, reducing the impact of INS drift — a function of time, not distance. In contrast, GNSS error is completely determined by location. Because INS error propagation depends on how long the vehicle stays in an area of GNSS outage, protection levels for trips through the same area will be different if the vehicle is smoothly cruising or gets stuck in a traffic jam.
CONCLUSION
To gain a better understanding of how long and under what local conditions multi-sensor integrated navigation systems can maintain fault-free integrity, we evaluated navigation positioning errors in 3D-mapped downtown Chicago. The system we developed consists of sensors with which self-driving cars would reasonably be equipped: GNSS, INS, WSS and dynamic constraints. We showed that INS/GPS position errors along the path depend very strongly on the vehicle’s speed. When the system is augmented with WSS/VDC, position errors are suppressed, but the error propagation is still strongly influenced by the number of visible satellites.
ACKNOWLEDGMENTS
The research described in this article is supported by the National Science Foundation. Figure 1 was created by Alexis Arias of the Landscape Architecture + Urbanism Program at the Illinois Institute of Technology (IIT). The authors greatly appreciate the advice and help of Nilay Mistry from that program.
This article is based on the paper “Evaluating INS/GNSS Availability for Self-Driving Cars in Urban Environments” presented at ION ITM 2021, the virtual 2021 International Technical Meeting of The Institute of Navigation, Jan. 25–28, 2021.
KANA NAGAI is a Ph.D. candidate and research assistant in mechanical and aerospace engineering at IIT.
MATTHEW SPENKO is a professor of mechanical and aerospace engineering at IIT. He earned his M.S. and Ph.D. degrees in mechanical engineering from the Massachusetts Institute of Technology.
RON HENDERSON is a professor and director of the Landscape Architecture + Urbanism Program at IIT. He earned his Master of Landscape Architecture and Master of Architecture from the University of Pennsylvania.
BORIS PERVAN is a professor of mechanical and aerospace engineering at IIT. He earned his M.S. from the California Institute of Technology and Ph.D. from Stanford University.
Flight simulators range in price from free to tens of millions of dollars and in purpose from pure entertainment to serious business — such as learning to fly multi-million-dollar aircraft without crashing them in real life and getting anyone killed. Military and commercial pilots spend thousands of hours in simulators learning both routine operations and how to deal with emergency situations. They can become fully proficient through immersive training in these virtual environments. The U.S. Army, Air Force, Navy and Marines all use flight simulators to train pilots to fly in battle, recover in an emergency, and coordinate air support with ground operations. To do this, they use hardware and software developed both by military agencies and by commercial military contractors.
In high-end flight simulators, the trainee steps into a life-size replica of a cockpit, whereas others consist of several monitors that cover the trainee’s field of view, or, at the lowest end, everything is crammed onto a single monitor. All flight simulators, however, are designed to replicate as closely as possible the layout and controls of a real aircraft. (Ironically, the $120 Microsoft Flight Simulator Premium Deluxe Edition lets you fly 35 different planes, while flight simulators that cost tens of millions of dollars are limited to a few models because they have to physically replicate the cockpit layout, which varies from aircraft to aircraft. Some training centers invest in multiple simulators, while others privilege convenience over accuracy and use a single simulator model.)
Most professional flight simulators sit on top of either an electronically-controlled motion base or a hydraulic lift system that rotates the replica cockpit in three dimensions in reaction to both user input and simulated events. This provides trainees with haptic feedback, in other words, feedback they can feel. (Another example of a device that provides haptic feedback is a joystick with force feedback.)
Like when learning to sail offshore or to survive in the wilderness, a large component of any pilot training program is navigation. For flight simulators, this involves detailed aeronautical charts, huge amounts of Earth observation imagery including thousands of airports, and faithful replicas of several cockpit navigation instruments. While aviation programs provide standard training to ensure pilots can handle situations ranging from enemy fighters to bird strikes to engine failure, they may overlook the importance of duplicating actual cockpit instruments rather than relying on facsimile ones.
Simulating GNSS signals
This is where GNSS simulators come into play. They make it possible “to simulate the actual GPS signal required by the cockpit navigation instruments,” according to a case study by Orolia.
This approach, the company points out, offers advantages to both the trainees who use flight simulators and the engineers who develop them. For a trainee, “the advantage is that he is trained using the identical instruments as those in the actual airplane […] providing the same feedback as a real-world experience.” For an engineer developing a flight simulator, GNSS simulators make it possible to “design more effective flight simulation programs without compromising quality.”
Furthermore, “using real navigation instruments may […] reveal unexpected behavior from the instrument, which helps the pilot to be prepared for this possibility. If any conditions involving the plane dynamics are not properly handled by the navigation unit, the pilot can obtain actual feedback from real navigation instruments, which could differ from feedback provided by a facsimile instrument.”
Hardware-in-the-loop (HWIL) techniques enable Orolia to integrate its simulator in a flight simulator to reproduce the GPS/GNSS dynamics for the airplane in real time. “Because the pilot steers the aircraft in real time, the GPS simulator must also simulate GPS signals in real time, forming an HWIL integration,” the company said. “This integration enables the flight simulator to integrate the actual navigation unit to provide a very realistic environment for the trainee.”
Racelogic, another manufacturer of GNSS simulators, is launching a new RealTime LabSat that can connect to Microsoft Flight Simulator, including the new 2020 version. “This will create a live GNSS RF feed that accurately follows the trajectory in the simulator, enabling the testing of any GNSS device as though it were being flown on the aircraft,” said Julian Thomas, the company’s managing director. “To help make this a cost-effective solution, we have recently optimized our SatGen signal simulation software so that a real-time simulation such as this can be carried out on an entry-level PC with a full constellation of simulated satellites.”
The GNSS and flight simulation industries overlap even further. For example, Garmin, which manufactures consumer GPS receivers, makes the avionics used in some professional flight simulators.
Simulator demand on the rise
The utility of simulators is not limited to training human pilots and drivers. The demand for simulation is being sharply increased by the development of autonomous vehicles of every kind — from self-driving cars to unmanned aerial vehicles (UAV), from bathymetric vessels to urban air mobility (UAM) aircraft.
For example, manufacturers of self-driving cars need to simulate driving millions of miles, in all kinds of traffic and weather conditions, to perfect their vehicles’ algorithms. The result of all these simulations is better trained human and robotic pilots and drivers prepared for real situations, superior mission readiness, and maximum safety for both military and civilian operations on land, at sea and in the air.
Feature image: In a simulated G1000 NXi integrated flight deck for a King Air 350, a pilot refers to the Garmin Pilot app, used as a supplement during flight. (Photo: Garmin)
Two companies have integrated GPS/PNT tech into a growing autonomous vehicle market: driverless shuttles for retirement communities. Powering the service, a cloud-based GNSS corrections system delivers centimeter-level accuracy without deploying and maintaining a GNSS network. This leading-edge application targets autonomy at scale and enables high-precision positioning for mass-market automotive and autonomous vehicle applications.
Photo: Voyage
For many seniors, retirement communities offer the best of both worlds: the freedom to live in their own homes and access to immediate assistance when they need it.
Driverless cars are an option several retirement communities have embraced to better serve residents who no longer have the ability or desire to drive, but want to retain the ability to come and go as they please.
“Autonomous vehicles are a great fit for any community where the environment is well-understood, less complex than dense urban areas, and the transportation demand is high,” said Justin Erlich, vice president of strategy, policy and legal for Palo Alto, California-based Voyage, a company that employs existing technology to develop fleets of autonomous vehicles. “Retirement communities satisfy all of these characteristics.”
Serving Seniors
Voyage deployed driverless shuttles to serve 130,000 retirees at The Villages, a massive retirement community encompassing more than 50 square miles in Sumter County, Florida.
“The community’s residents enjoy an extremely active lifestyle, but often face challenges getting around,” Erlich said. “Autonomous vehicles are perfectly suited to meet this demand.”
The six vehicles in the fleet stay within the confines of the retirement community, where all roads have been precisely mapped, speed limits are lower and traffic patterns are more clearly defined than in a typical city. The vehicles travel over a network of roads that span 750 miles.
THE VILLAGES
Location: Sumter County, Florida Area: 50 square miles Road span: 750 miles Number of retiree residents: More than 130,000 Number of Voyage autonomous vehicles: 6
To request one of Voyage’s autonomous vehicles, a resident can summon the shuttle on-demand with a smartphone. Voyage is working with residents on the possibility of using other shuttle-request options, including text messages, phone calls and well-marked pickup zones in crowded downtown areas, Erlich said.
All passengers ride with Voyage safety drivers in the front seat. The drivers take note of any “events” during rides so Voyage can investigate how to improve the riding experience.
Photo: Voyage
Eventually, residents will be the only passengers in the vehicles. If they need assistance during a ride, they will be able to communicate with remotely located Voyage employees, Erlich said.
Testing and rolling out fleets of driverless vehicles in private communities like The Villages allows Voyage to develop and perfect the autonomous vehicle technology it uses. As a result, the company can deliver the service to new clients in mere months.
Voyage, which has been working on its autonomous technology for more than two years, uses daily customer feedback to constantly adjust to its technologies to better serve riders.
“Feedback collected during test drives is one of the biggest factors in shaping our technology roadmap,” Erlich said. “Driving data — collected across all sensors and traffic scenarios — is automatically processed each night, highlighting interesting ‘events’ for our engineering team to analyze and review.”
During Voyage’s beta test process at The Villages, residents applied to be part of the company’s Pioneer Program for early access to the autonomous vehicles and the ability to offer feedback early on. Riders who test the service complete scorecards after each trip to help improve the experience for all riders.
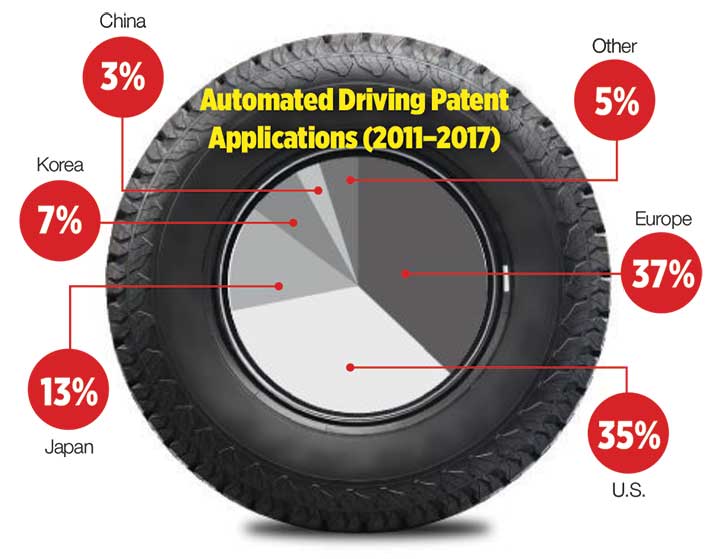
Europe Takes the Lead
(Tire photo: iStock.com / TANAPHONG)
Autonomous vehicle technology is taking off in Europe, shows a study published by the European Patent Office and conducted with the European Council for Automotive Research & Development. From 2011 to 2017, European patent applications related to automated driving increased 20 times faster than other technologies in recent years. The “Patents and self-driving vehicles” study reveals automated driving patent applications at the European Patent Office rose 330%, compared with 16% for all technologies during the same time.
“As one of the only self-driving car companies that are picking up actual passengers as a part of our Pioneer Program, we believe we can learn a lot from the feedback we hear from our initial Pioneer riders as we try to make this the best service for The Villages,” said Oliver Cameron, co-founder and CEO of Voyage. “We are excited to see so much interest from other residents to become a part of this program.”
When developing autonomous technology, safety is Voyage’s top priority, Erlich said. Every change to the hardware and software used undergoes a multi-stage validation process. Company engineers perform “on-desk” tests of every change using unit tests, functional tests and a driving simulation environment. Then, an operations team runs suites of real-world traffic and validation tests in a completely controlled environment at a closed-course testing facility in San Jose, California
“Voyage makes extensive use of simulation testing and closed-course validation before any of our vehicles are driven in our partner communities,” Erlich said. “All changes must pass these closed-course tests before making their way onto the roads of our partner communities.”
Vehicle design also ensures riders stay safe. “Our fleet vehicles have been designed with multiple levels of safety redundancies for braking, steering and power, and leverage an advanced diagnostics system to automatically detect anomalies and safely stop the vehicle,” he explained. “In addition, we have developed a remote teleoperations solution that allows the vehicle to request additional help when a driver is not physically in the vehicle.”
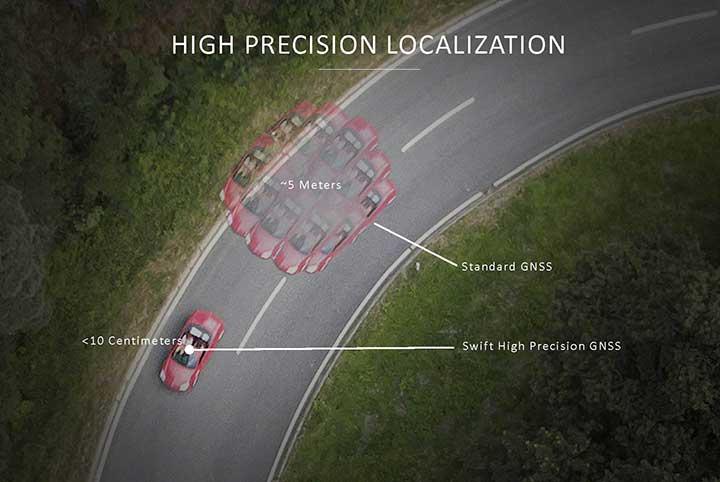
Skylark provides high-precision localization. (Image: Swift Navigation)
Making Autonomous Work
When building an autonomous system, localization — knowing exactly where you are in the world — is critical. Erlich said it’s often difficult to estimate your position within an accuracy of several feet when using more traditional GPS solutions.
“For autonomous driving, you need to be able to estimate within several centimeters,” he added.
Voyage uses Swift Navigation’s GNSS receivers and Skylark network as one of the primary inputs into its localization solution.
Swift Navigation is a San Francisco-based tech firm that develops GPS technology to power autonomous vehicles. It is working to extend the Skylark network across the contiguous United States, and then plans to expand globally.
“Coupled with high-definition maps, odometry sensors and other inputs, we’ve been able to use Swift Navigation’s differential GPS solution to achieve the localization results we needed to deliver a true autonomous driving service,” Erlich said.
Voyage’s autonomous vehicles are equipped with a suite of sensors on their roof racks that includes the Swift Navigation Piksi Multi GNSS receiver, lidar devices, cameras, radar and an inertial measurement unit. They create and constantly update a 3D map of the vehicle’s surroundings.
Swift Navigation’s Duro is one of two GNSS receivers Voyage uses for its autonomous vehicles. (Photo: Swift Navigation)
A computer in the trunk integrates all sensor signals and uses the vehicle’s Controller Area Network (CAN) bus to operate steering, braking and other functions.
Skylark, Swift Navigation’s cloud-based GNSS corrections service, provides Voyage’s autonomous vehicles with precise positioning to eliminate the complexity of deploying and maintaining GNSS networks.
Skylark offers a plug-and-play experience that delivers convergence times measured in seconds. Its positioning algorithms provide a continuous data stream to individual devices from the cloud. This data stream allows for quick positioning and high reliability and availability.
The correction service enables receivers to connect to a constantly adapting, cloud-based model to obtain GNSS observations. Dependence on base stations in each area of deployment is eliminated, increasing the geographic area in which they can travel. Skylark works seamlessly with both of Swift Navigation’s GNSS receivers — Piksi Multi and Duro.
In addition to Piksi Multi and Duro, Voyage uses third-party receivers and microprocessors that benefit from the lane-level positioning Skylark delivers.
Equipment Specs
Photo: Swift Navigation
GNSS receiver one. Swift Navigation — Piksi Multi
• Dual-frequency and multi-constellation
• Up to 20-Hz solution rates
• Raw data outputs from on-board MEMS IMU GNSS receiver two. Swift Navigation — Duro
• IP67 rated
• Centimeter-level positioning
• Raw data outputs from on-board MEMS IMU Lidar devices. Velodyne — VLS-128
• 128 channels
• Up to 300-meter range
• Up to 360-degree surround view Cameras. iDS — Global-Shutter units Proximity sensors. Chrysler OEM Inertial measurement unit. Xsens — MTi-300
• 375-Hz bandwith for accelerometers
• 415-Hz bandwith for gyroscopes Antenna. Swift Navigation — Mini-survey for the Duro RTK unit
• 1 L1/L2 GPS/GLONASS/BeiDou mini-survey
The Swift product suite delivers centimeter-level localization —important to riders who may have mobility issues that require vehicles with smooth starts and stops.
Skylark was built specifically to deliver the speed, security, precision and reliability demanded by automotive manufacturers with autonomous and safety applications architected to support ASIL-rated (Automotive Safety Integrity Level) systems.
Because Skylark is a network, it is fault tolerant. In the unlikely event an individual cloud reference station goes offline, Skylark’s positioning algorithms will continue to provide a continuous stream of corrections.
Once connected, Skylark creates a precise and constantly adapting model of the atmosphere and related errors affecting GNSS. Connected users simply turn on their devices to get the precise positioning data they need.
Safety Drivers
As drivers get older, their mental and physical health can affect their ability to operate vehicles safely. Vision and hearing loss keep many older drivers off the road. Fear of driving at night or in the rain also can be a problem for older drivers. According to the Centers for Disease Control and Prevention (CDC), about 7,400 adults over the age of 65 died as a result of car accidents in 2016. That same year, more than 290,000 of adults over the age of 65 were treated in emergency departments for injuries sustained in motor vehicle accidents.
Residents at The Villages who have used the autonomous vehicles report positive feedback, Erlich said. They consider the service a major improvement to their day-to-day activities because it’s convenient. Plus, they prefer the ability to be more carefree during happy hour, fewer hassles with traffic and parking, and lack of interactions with poor drivers.
Being on the cutting-edge of a generational technology also is a positive for many residents, Erlich said. “Autonomous vehicles create a clear path to safer, more accessible, and reliable transportation for everyone. From a safety perspective, autonomous vehicles have the potential to significantly reduce the more than 37,000 deaths attributed each year to driving. From a lifestyle perspective, there are also huge opportunities: from reclaiming daily commute time, to providing a reliable means of transportation to people with mobility challenges.”
Positioning Intelligence Key to Autonomous
Hexagon’s Positioning Intelligence (PI) division is an integral partner in many autonomous vehicle development projects, providing technologies such as SPAN (GNSS+INS technology), TerraStar-X corrections, and Automated Research and Development Platforms from its brands including NovAtel, VERIPOS and AutonomouStuff.
NovAtel hardware and software products, along with engineering support, address the need for accurate, reliable and robust GNSS positioning. TerraStar-X correction services deliver worldwide coverage and assured positioning with continuous availability, and provide the accuracy and rapid convergence needed to achieve lane-level precision for safe autonomous operation.
For developers of autonomous consumer transportation, integrated research and development automotive platforms from AutonomouStuff accelerate time to market.
Making It Safe. For large-scale automotive production, safety is the main focus. The Hexagon PI software positioning engine and TerraStar-X technology are being developed to ASIL-B (Automotive Safety Integrity Level B) standards to provide precise positioning for lane-level performance in autonomous applications.
Image: Trimble
Road Corrections
Incorporating precise and consistent absolute location information is an essential component of enabling advanced driver assistance (ADAS) and autonomous driving (AD) technology for vehicles.
To help meet this need, Trimble recently released Trimble RTX Auto. The Trimble RTX Auto correction service provides a precise point position (PPP) solution that can be used to correct the position of any auto grade GNSS chipset. RTX Auto works in parallel with other on-vehicle sensors to deliver a positioning solution that satisfies ADAS and AD requirements.
Absolute position contributes to many features:
Lane centering. Systems designed to keep a car centered in a lane, relieving the driver of the task of steering, is often achieved with cameras and absolute position data. Absolute position can be used when lines disappear, or weather prevents them from being seen.
Map aiding. a combination of precise map and location data helps to navigate junctions, lane changes, roundabouts or intersections where lane information is essential to safe driving.
Prediction of future road structure. Both allow a vehicle to begin slowing in advance of a bend in the road and to avoid harsh braking that would happen if the system only relied on short range sensors.
Adhering to the speed limit. This helps drivers anticipate changes in speed limits when a downpour prevents cameras from seeing the speed limit signs or when they might be obscured by natural surroundings or another vehicle.
RTX Auto is both Automotive Safety Integrity Level (ASIL) and Automotive Software Process Improvement and Capability Determination (ASPICE) certified. These certifications validate that Trimble RTX Auto meets functional safety requirements for ADAS and autonomous applications in the auto industry.
Super Cruising. Trimble is on the road today providing RTX-based absolute positioning within General Motors’ Super Cruise driver assistance feature, a hands-free driving system for the freeway. For more information on Super Cruise, visit www.cadillac.com/world-of-cadillac/innovation/super-cruise.
Wireless LBS Contributing Editor Kevin Dennehy sits in Delorean connected vehicle on “Back to the Future Day” Oct. 21 sponsored by ITS America.
The battle over when autonomous vehicles will be on the road for consumers seems to be divided along government/big auto companies/academic institutions vs. such technology companies as Google, Uber, Tesla and others. Two recent Washington events highlighted the gulf in expectations for full autonomous vehicle rollout. The question is, why are the two groups so far apart? Funding? Safety? Cyber Security?
WASHINGTON — A panel of business and auto experts discussed the quick rollout of autonomous vehicles and the implications on business and consumer mobility at an Oct. 14 National Press Club meeting here. In terms of the time for consumer rollout, Google founders Larry Page and Sergey Brin attended a DARPA autonomous vehicle challenge in 2007 and determined they didn’t want to wait 15-20 years to roll out a business, said Larry Burns, Univ. of Michigan professor and Google consultant.
Burns said that when he was the vice president of research and development at GM, it would have been hard to convince company execs and lawyers to go ahead with full-blown autonomous technology, while such technology companies as Google are forging ahead.
Burns acknowledged the technology has to work as the automobile is a complicated and sophisticated machine. “Google has driven over a million miles. They have engineers and technicians capture any real-time incidents and take them back to a lab to create computer programs. I can tell you the technology is very close,” he said. “I think we need to get a small fleet on the road in one place, because the technology has to be proven on real roads, to see what human drivers have to deal with. We have the tendency to rush to large volumes because we think it is the answer, but we need to learn on a small scale — and share the data between regulators and legislators.”
While Burns concentrated on the usual story — autonomous vehicles will dramatically decrease worldwide highway fatalities — he said that a new automotive DNA will shape a new market that will focus on the rise of electric vehicles and a sharing economy. “There will be more shared vehicles and the opportunity to created tailored vehicles. Average speeds are 25 miles per hour and most trips are less than eight miles,” he said. “It will change our dependency on oil, land use, parking and access.”
With automated technologies, a car will be able to decrease in size to 1,000 pounds, which allows an electric car’s battery to work more efficiently, Burns said.
Although they do not have an autonomous vehicle strategy, one Domino’s Pizza executive said that the technology would be important for their own fleets, but the franchisees would have to see a return on investment to purchase their own fleet.
“We own supply chain centers and drive 22 million miles delivering food to thousands of stores,” said Lynn Liddle, Domino’s executive vice president of communications, investor relations and legislative affairs. “The pizza industry has not been on the forefront of transportation. When we were founded, the goal was to get pizza to a dorm in 30 minutes. We are now into tech — quick ordering and texting through Ford Sync. Our Australian franchisees are using GPS-enabled systems that allow [customers] to know when their pizza is coming.”
Burns said he could see a two-person pod swinging by a Domino’s, hitting the post office and Fedex as part of the same trip. “The challenge of bringing goods to my door that weigh less than a pound in the last mile is formidable,” he said. “This is an exciting opportunity for the trucking industry. We may see this Class A trucks shortage of truck drivers [go away]. There is a great early opportunity for goods movement with a very good payback.”
One panel member from Securing America’s Future Energy, or SAFE, said the organization is establishing an Autonomous Vehicle Task Force, a group of industry experts that will assess the social, political, market and regulatory challenges of the new technology.
“It’s important to not be dependent on one fuel source, which is run by very high-priced cartels and national oil companies,” said Robbie Diamond, SAFE president and CEO. “This is the first time we have seen the convergence of technology and business models, not just the safety concerns. This is a once-in-a-century opportunity to have a better mobility system.”
Not Everyone Believes Autonomous Vehicles Will Be Ubiquitous By 2020…
Delorean connected vehicle at “Back to the Future Day” sponsored by ITS America.
Some transportation industry veterans don’t buy that the autonomous vehicle will have a quick rollout. While autonomous vehicles are great for short trips, they may not be the solution for families who live in rural areas, said Thomas Dingus, Virginia Tech Transportation Research Institute, at a Capitol Hill panel sponsored by ITS America Oct. 21.
“The bestselling car today is a pickup. Why would you want an automated vehicle if you live in the country?” Dingus said. “Some [autonomous vehicle] adoption will be at a lower rate, some not at all. We will still have drivers on the road. There is no doubt that automated vehicles are coming, but it will be slower than people think.”
Dingus’ Virginia Tech entity is part of the Virginia Connected Corridor Project, which tested autonomous vehicles on two interstate highways in the Washington, D.C., area recently.
One panel topic is the need for better highway infrastructure in order for automated systems to work. Case in point was the problems Tesla has been having with its new lane-control feature because it cannot read the on-the-road markings. “Automated vehicle technology doesn’t work when you don’t have good lane markings. People who said the technology is ready today are wrong,” said Hillary Cain, Toyota director of technology and innovation policy. “We really need to make better investment in our infrastructure.”
Cain also said that the industry is far away from achieving National Highway Safety Testing Administration Level 4, or full self-driving automation. “We are much farther away than we think we are,” she said.
Despite a nationwide shortage of drivers, one trucking industry executive on the panel didn’t seem sold on autonomous vehicles. “The [automated] solution has to be 99.9 percent safe. You have to prove you could have done better than with a human being driving,” said Alan Korn, Meritor WABCO director of advanced brake systems integration.
Also at the panel, Sen. Gary Peters, D-Mich., gave his opinions of the Google car and the new Michigan Mobility Transformation Center, and said the new autonomous technologies will be disruptive to whole industries. “The number-one job at risk is drivers. But the most dangerous vehicle on the highway will be driven by humans,” he said. “I had the opportunity to ride in the Google car, it’s a bit freaky.”
In other news:
Driverless, the Business of Autonomous Vehicles, will be held March 22-23, 2016, at the Crowne Plaza Hotel-San Francisco Airport. More than 30 speakers will discuss worldwide autonomous vehicle markets, safety and security, new technologies and other topics. Go to www.driverlessmarket.com for more information.
In October 2014, Tesla started equipping its Model S with hardware to allow for the incremental introduction of self-driving technology: a forward radar, a forward-looking camera, 12 long-range ultrasonic sensors positioned to sense 16 feet around the car in every direction at all speeds, and a high-precision digitally controlled electric assist braking system.
Version 7.0 of Tesla’s software has now been released with Autopilot, which allows those tools to deliver a range of new features designed to work in conjunction with the automated driving capabilities already offered in Model S.
Tesla calls Autopilot a major step toward autonomous driving. “Tesla Autopilot relieves drivers of the most tedious and potentially dangerous aspects of road travel,” according to a Tesla blog. “While truly driverless cars are still a few years away, Tesla Autopilot functions like the systems that airplane pilots use when conditions are clear. The driver is still responsible for, and ultimately in control of, the car. What’s more, you always have intuitive access to the information your car is using to inform its actions.”
The combined suite of features represents an integrated autopilot system involving four different feedback modules: camera, radar, ultrasonics and GPS. “These mutually reinforcing systems offer real-time data feedback from the Tesla fleet, ensuring that the system is continually learning and improving upon itself,” the Tesla blog said.
Autopilot allows Model S to steer within a lane, change lanes with the tap of a turn signal, and manage speed by using active, traffic-aware cruise control. Digital control of motors, brakes and steering helps avoid collisions from the front and sides, as well as prevent the car from wandering off the road. “Your car can also scan for a parking space, alert you when one is available, and parallel park on command,” Tesla said.
Release of version 7.0 also features a significant visual refresh of the digital display. The instrument panel is focused on the driver and includes more functional apps to help monitor the ride.
Tesla founder Elon Musk said during a press conference that drivers should exercise caution in the initial months of the rollout, and consider Version 7.0 a beta release. “We’re advising drivers to keep their hands on the wheel at this early stage,” Musk said. The car’s dash alerts drivers when they need to take the wheel.
Just days after the launch, videos began appearing on the Internet showing near misses and other errors.
After months of negotiation, Nokia will sell its HERE Maps division to a consortium of German automakers — BMW, Daimler and Volkswagen — for $2.71 billion, according to the TU Automotive website.
Under the agreement, HERE Maps would turn into an open platform that all car manufacturers can use for navigation and mapping inside vehicles, giving automakers independence from companies such as Google for maps and navigation at a time when the technology moves toward the connected and self-driving car, which rely on navigation technology.
The three German car makers plan to offer the platform to Fiat Chrysler, Renault, Peugeot, Ford, Toyota and General Motors, allowing them to use the mapping service for free without licensing issues.
Nokia is selling the entire unit of HERE, meaning the car consortium will likely continue hiring developers to work on the platform. Companies like Chinese search giant Baidu and Facebook use HERE Maps to power its own mapping services. It remains to be seen how the new deal will affect those services.
“Only with high-precision maps will automated driving on freeways be possible from 2020,” said Bosch board member Dirk Hoheisel. TomTom says it plans to have new high-precision maps for automated driving for all freeways and freeway-like roads in Germany by the end of 2015.
The race for the automated vehicle is on. This time, it’s not about whether automotive OEMs or tech will own the vehicle. It’s a battle between Baidu, China’s web giant, and Google, and it isn’t clear who will win. Baidu has announced it will launch an unmanned car in the second half of this year. Despite speculation that Baidu will be working with BMW, Baidu hasn’t announced its automotive partner. The Baidu vehicle will provide the flexibility of some conventional controls, such as pedals, coupled with automation, unlike Google’s approach of being completely autonomous, without pedals and steering wheel.
One of the most practical uses of artificial intelligence is in the automated vehicle, as cars need to recognize and sort images they “see,” and make quick safety decisions. In a recent TED talk, Chris Urmson of Google revealed a few of the unusual things that Google cars have had to process while driving. The cars have successfully encountered a woman in an electric wheelchair chasing a duck on the road and a child driving a toy car in the road. I wouldn’t be surprised if there are some even weirder encounters that Google is shielding us from.
Artificial intelligence is critical to the automated vehicle. This year Baidu won a prestigious international artificial intelligence competition at Stanford, but was just stripped of its title and barred from competing in 2016. Apparently, the Baidu team broke the rules on how many tests they could run. In the competition, computers had to recognize and sort images and classify objects into 1,000 different categories. The teams were allowed to run a limited number of tests to train their programs on identifying objects. The Baidu team exceeded the limits by submitting their program using different accounts. In an article in the New York Times, Jitendra Malik, an expert in computer vision, compared the actions of the Baidu team to drug use during a sports competition. “If you run a 9.5-second 100-meter sprint, but you are on steroids, then how can your result be trusted?” Malik said.
Automated vehicles aren’t the only location market Baidu is aggressively pursuing. With technology from IndoorAtlas, Baidu has rolled out indoor location to 270 million active users of its map application. The solution uses mobile device technology to create geomagnetic maps of indoor places to enable indoor search and to power store and product search, as well as way-finding. A physical map of a building is uploaded into an app on a mobile device, like a smartphone. Using the app, a person walks all corridors in a building, thereby adding location positioning and creating a map.
Let’s return to the topic of automated vehicles. Earlier this month, Uber suffered a blow when the California Labor Commissioner’s Office ruled that drivers are employees and not contractors, and therefore need to be so compensated. Taxi and limo services had been hurt by services like Uber, and they pressed for redress from what they felt was unfair competition.
Like Uber, the automated vehicle market will likely hit intense push-back from a number of industries that will be disrupted. These include insurers, taxi and truck drivers, and personal injury and traffic litigation attorneys. These groups may try to build regulatory roadblocks for automated vehicles. And as their businesses may suffer, the automated vehicle industry needs to think now about how to mitigate the damage and create allies. With a completely different political process, Baidu may encounter no such resistance in China — quite an advantage. Perhaps Baidu will be first out of the gate, but may not be the long-term winner. Think Ford Sync.
The 1-million-mile milestone was for modified Lexus RX 450h SUVs equipped with the self-driving technology, but the car pictured here — built entirely by google — is more fun to look at. (Image: Google)
Google’s self-driving car has driven itself one million miles. Google announced the milestone June 4 on Google Plus. “Our software has now self-driven the equivalent of 75 years of typical U.S. adult driving! Along the way, we’ve navigated more than 200,000 stop signs, 600,000 traffic lights, and seen 180 million vehicles — with several thousand traffic cones, some fluttering plastic shopping bags, and a rogue duck thrown in for good measure.”
In May, Google announced that the car had driven 1.7 million miles, but that number was for both autonomous and manual driving, The one-million-mile milestone the car just reached is for autonomous driving only.
“We’ve come a long way since +Larry Page [Google president and CEO] first challenged us to demonstrate that self-driving technology had long-term potential. Back in 2009, he gave us two audacious goals. The first was to drive 100,000 miles on public roads; in 2009, this was about 10x more miles than had ever been completed by any autonomous driving team. The second was to drive 10 sets of 100 interesting miles — well-known California routes that included crossing the Golden Gate Bridge, navigating the curves of Lombard Street in San Francisco, and traversing the 200+ traffic lights of major boulevard El Camino Real.
“We met those early goals, but it was hard to imagine we’d ever cruise the boulevards of Mountain View, Calif., as smoothly as we do today. We’re taking this million mile milestone as further proof that fully self-driving vehicles will become a reality, and we’re looking forward to finding out where the next million miles will take us.”