This is the story of two surveyors who met after retirement to accomplish two geodetic leveling projects in Maine and New Hampshire. Independent of each other, we had vacationed in those states, skiing and hiking. The idea of doing some geodetic leveling in that area appealed to us.
We first re-leveled parts of a 1942 Coast & Geodetic Survey (C&GS) line between North Conway, New Hampshire, and Gilead, Maine, to honor the surveyors of World War II. During summer trips, we looked for the benchmarks along the line, NGS archive L9971, and figured out which ones were missing. We set new marks as needed. Leveling took place between September 9 and 22, 2013, archived by NGS as L28096, Second Order Class II.
We used K&E Lovar yard rods — nice light wood rods with rod level, such as the U.S. Geological Survey (USGS) is believed to have used leveling up Mount Washington in 1925 — and a Zeiss Ni-2 level with 1:33 stadia interval (to convert yards to feet distance). Leveling up and over Hurricane Mountain Road NE of North Conway was a precursor to leveling up Mount Washington in 2014. We used a handheld GPS receiver to obtain the coordinates for marks that did not already have good accuracy. We obtained Online Positioning User Service (OPUS) coordinates for the reference marks on top of the mountain.
Leveling through the Mount Washington “cow pasture.” In the inset, MAC 100, one of the USGS benchmarks along the Auto Road. (Photo: Mike Pelchat, NH DNCR)
After completing the 2013 releveling of the 1942 C&GS line, we wondered about releveling the 1925 USGS line up Mount Washington. We approached the general manager of the Mount Washington Auto Road, Howie “Weems” Wemyss, explained what we proposed to do, and asked for his buy-in. He approved the project enthusiastically, allowing us full access to the road for the project. On May 12, we began the level run from first-order benchmarks in Gorham, New Hampshire, and finished on June 8.
Until this 2014 project, the elevations of Mount Washington were referenced to the National Vertical Datum of 1929 (NGVD 29) and were only available on paper from USGS. The professional purposes of the project were to connect Mount Washington to the North American Vertical Datum of 1988 (NAVD 88) and make the benchmark data available online from the National Geodic Survey (NGS). Two personal purposes were to continue enjoying the natural area and meet the challenges of the topography and weather.
Deciding where to place each level setup on the steep terrain involved a compromise between time spent trying to read at the very top of the rod and a quicker setup decision that usually sacrificed 1.0-1.7 ft of the rod. The maximum vertical gain on the 10-ft rod was typically about 7.5 ft per setup, sighting high on the lower rod while sighting on the upper rod above the yard equivalent of 0.5 m — thereby reducing refraction errors per recommended procedures. Sight lengths on the Auto Road were as short as 10 ft, averaging 30 ft. Along the less steep terrain of Route 16 between Gorham and the Auto Road, leveling between marks set by NHDOT, sight lengths ranged around 150 ft. Temporary benchmarks on boulders were selected between the MAC marks on the Auto Road to keep the number of setups in a section below 30. That way, if the forward and backward runnings of a section misclosed, it was not a hopeless number of setups to rerun and isolate the error. The grade between MAC marks was 14% in two cases, otherwise around 10%. To eliminate 1-yd reading errors, 1-ft markings were painted on the side of the rod and read to x.1 ft before the 3-yd readings (top, middle and bottom wires), then the foot and yard readings were compared. The typical elevation difference between a MAC mark and a TBM or between TBMs was 150 ft. The typical time per setup was 4.5 minutes, depending on how far apart the turning points were.
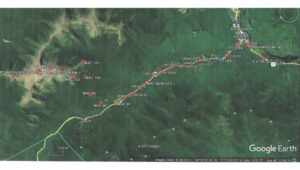
Project Diagram, 2014 Mount Washington leveling. ~8 miles SW along NH 16 from Gorham, 7.6 miles up the Auto Road. (Photo: Google Earth)
One bit of unwanted excitement occurred while the road crew was doing the annual rebuild of the 1-mile gravel section above Mile Post 5. The road workers pulled out the flagging at MAC 102, which is a bit hidden by vegetation. Evidently, it conflicted with the orange flagging they were also using. Leveling continued right past the disk for five setups until Bob noticed green paint on a boulder used as a turning point in the prior run. We had to reverse back to the mark. Fortunately, the section closed even with the extra setups.
There are some beautiful small waterfalls along the road that are easier to admire when you are walking by, not trying to keep your vehicle on the road. One day, we spotted a momma bear and two cubs. One man stopped to reminisce about his time working with Brad Washburn while Brad was doing extensive surveying and mapping on the mountain.
The USGS benchmarks are designated MAC 97 to MAC 104, “MAC” being the initials of the USGS party chief followed by a sequential number as the party progressed along the level line. There are lower numbered ones away from the Auto Road, and there used to be some higher numbered ones, which have since been destroyed.
The project data was accepted, adjusted and published by NGS as archive L28128. The elevation of the highest and most visited summit mark, Mount Wash Reset (DP4904), by the cairn and the brown park sign, dropped 0.77 ft, referenced to NAVD 88 compared to its elevation referenced to NGVD 29. The NGVD 29 elevation published by USGS (solely in feet), based on the 1925 leveling, was 6,288.176 ft (divided by 3.2808333 ft/m to obtain 1,916.634 m). These values were rounded off to 6,288 ft and 1,917 m, respectively, for display on the summit sign.
Jeff Olsen (on the left) and Bob Kunes in front of the observatory.
The NAVD 88 elevation for Mount Wash Reset, published by NGS based on this 2014 leveling, is 6,287.41 ft or 1,916.406 m. These values would round down to the next lower whole unit, changing the elevations that could be displayed on the park sign and making the mountain’s elevation lower. Since re-determining the mountain’s elevation was not a priority of this project, and a different elevation than the 6,288 ft that had been used for years would mean changing all those mugs, T-shirts and other tourist paraphernalia, we are not suggesting changing the elevation with which the public is familiar.
All the differences of elevation observed between the various USGS benchmarks agreed within Second Order Class II limits with the previous 1925 work. At that level of precision (section closures less than or equal to 8 mm multiplied by the square root of the distance in km), the 2014 leveling did not reveal or detect vertical motion on the mountain, after an interval of 89 years. The project could always be re-run with first-order equipment and procedures, cutting the section closure error budget in half to 4 mm multiplied by the square root of the distance. Various marks could be observed in a regional high-precision geoid modeling campaign.
(Photo: Adam Smigielski/iStock / Getty Images Plus/Getty Images)
One of my favorite parts of this job — and, more generally, one of my favorite things to do in life — is to ask questions.
Matteo Luccio
For this magazine and to stay on top of the latest issues and trends in our industry, I ask questions to the members of our Editorial Advisory Board (EAB) for our EAB Q&A section, to representatives of GNSS/PNT companies for our cover stories, and to participants at conferences and trade shows.
In my personal life, I ask questions to people I invite on sailing trips, to dinner parties and on hikes. When I am traveling or just about town, if I overhear somebody knowledgeable speak about an interesting topic — from quantum mechanics to French politics to Baroque music — chances are that I will say, “Excuse me. May I ask you a question?”
So, here are a few of my current questions about GPS/GNSS/PNT. To make it clear that they are not in order of importance, I put them in alphabetical order.
How do the other three GNSS constellations benefit GPS users?
How is GPS faring in Congress? (On June 17, Dana Goward reported that Congress had refused the U.S. Space Force’s request to fund a program to make GPS more resilient by building and deploying small GPS satellites. Please note: I am looking for a knowledgeable “Washington correspondent” for GPS World, who could keep our readers updated on relevant developments in Congress and the executive branch.)
If the QZSS or NavIC regional systems became global, would that significantly improve GNSS? If so, how?
What are currently the most promising approaches to non-GNSS PNT for applications that do not require high accuracy?
What are the benefits of adding signals from even a few low-Earth orbit (LEO) satellites to a PNT solution?
What are the latest advancements in the scientific uses of GNSS signals, such as to develop models of the ionosphere or to test theories in fundamental physics, such as relativistic positioning?
What are the most promising approaches to pinpointing GNSS interference from LEO satellites?
What is the most promising approach to high-precision positioning with smartphones?
What is the status of the Chimera enhancement to the L1C signal? What benefits will it deliver?
What reforms in GPS governance would help accelerate modernization of the system?
When will M-code GPS user equipment be widely deployed to U.S. armed forces?
When will the Next Generation Operational Control System (OCX — the future version of the GPS control segment) become operational? What’s missing? What’s the holdup? (According to GPS.gov, the U.S. Space Force completed all 17 planned monitor station installations in July 2021.)
Which GNSS signals are cellphones in the U.S. legally allowed to use?
I will pose some of these questions to our EAB over the next few months. If anybody else out there would like to chime in, please let me know.
SBG Systems’ INS Ellipse-D powers Leo Drive’s autonomous car.
The evolution of autonomous vehicles has been a fascinating journey, transforming from science fiction to reality over the past few decades. Most modern cars on roadways worldwide have varying levels of autonomy, ranging from Level 1 features, such as cruise control, to Level 5 fully autonomous features, including the ability to monitor roadway conditions and perform safety-critical tasks without human intervention.
In recent years, several technology and automotive companies have recognized the benefits of autonomous vehicles and their potential impact on communities and industries worldwide. In response, industry leaders have supported autonomous vehicle innovation and adoption by offering new products and working closely with educators, nonprofit organizations and other groups that aim to use autonomous solutions to connect the world.
New solutions combining GNSS technology with inertial navigation systems (INS) have emerged to increase autonomous operation efficiency and development. GNSS/INS serves as the foundation for various autonomous operations, ranging from self-driving vehicles on public roads to sophisticated port machinery. In urban public transportation, the accuracy of GNSS signals can be compromised by tall buildings and signal interference, leading to potential errors in navigation. Meanwhile, in the specialized vehicle sector, the lack of extensive experience in complex environments poses challenges, with unpredictable issues potentially arising.
As we enter a new era of advanced autonomy, companies such as SBG Systems and Septentrio, along with their partners, are pushing the boundaries of what is possible in self-driving technology. SBG Systems and autonomous vehicle developer Leo Drive are integrating GNSS/INS systems, multiple cameras and lidar sensors into Leo Drive’s autonomous platforms for precise navigation and accurate positioning data for safe and efficient operations in urban applications.
Septentrio and Smart yoUr Mobility Inc. (SUM) also are making significant strides in advancing autonomous operations. The companies have formed a strategic partnership to develop and implement a multi-sensor fusion system for autonomous driving. This collaboration aims to enhance self-driving vehicles’ accuracy, reliability and safety by integrating data from various sensors, including lidar, cameras and radar.
Additionally, recognizing the need for precise positioning in complex environments — such as ports packed with equipment and steel containers — SUM and Septentrio are working together on a solution that ensures accurate positioning and reliable autonomous operations in challenging port operations.
Enhancing precision and performance
Leo Drive offers scalable software and hardware solutions, providing a comprehensive, end-to-end service for integration into autonomous systems. The company’s mission is to enhance the accessibility and adoption of autonomous technology across various sectors, including UAVs, unmanned ground vehicles (UGVs) and autonomous driving systems.
To operate its autonomous vehicles effectively, Leo Drive was in search of an INS compatible with its existing platforms and robust enough to meet real-time processing demands in dynamic environments. The company also wanted an INS with dual-antenna RTK capability to offer consistently high precision in positioning and orientation, leading the company to SBG Systems’ Ellipse-D, a dual-antenna RTK INS.
Leo Drive integrated the Ellipse-D INS into its autonomous test vehicle, a passenger car converted for autonomous operations. Equipped with GNSS/INS systems, multiple cameras and lidar sensors, the vehicle requires precise navigation and accurate positioning data for safe and efficient operation. This vehicle serves as a critical platform for research and development (R&D) and technology demonstrations.
The test vehicle is powered by Autoware software, hosted by the Autoware Foundation, a nonprofit organization committed to developing open-source, collaborative software for autonomous vehicles.
Leo Drive mounted Ellipse-D INS onto its test vehicles using non-ferromagnetic materials to prevent interference and ensure optimal sensor performance. The electrical connections were made via RS-232/422 and CAN interfaces, and custom drivers were used within the ROS2 environment to integrate the Ellipse-D’s real-time data into their sensor fusion algorithms.
During the integration phase, the SBG Systems’ support team provided ongoing assistance to quickly address any challenges. The SBG Systems Support portal also was valuable, providing comprehensive guidance and troubleshooting assistance.
Leo Drive’s autonomous car is equipped with GNSS/INS systems, multiple cameras and lidar sensors for precise navigation as well as accurate positioning.
Ellipse-D played a key role in Leo Drive’s Autonomous Vehicle by providing accurate real-time navigation data. Its dual-antenna RTK capabilities ensure orientation data is reliable and supports the vehicle’s complex navigation algorithms. The sensor’s RS-232/422 and CAN connections allowed for easy integration with Leo Drive’s onboard computers. Custom drivers and nodes in the ROS2 environment facilitated smooth communication between the Ellipse-D and other vehicle sensors, enhancing overall system robustness.
Advanced features for better navigation
Since integrating Ellipse-D INS into its autonomous vehicle, Leo Drive said it has experienced several significant improvements, including:
Improved accuracy: Ellipse-D’s high positioning and orientation accuracy has been instrumental in refining the performance and reliability of Leo Drive’s autonomous systems.
Increased efficiency: Ellipse-D’s advanced algorithm enables smoother development processes and more accurate test results, streamlining R&D efforts.
Timely support: The comprehensive customer support, including detailed documentation and a responsive technical support team, ensured a seamless integration process.
Leo Drive identified three standout qualities of SBG Systems that have been critical to its success: exceptional customer support, high-quality products and a user-friendly support portal.
“Collaborating with SBG Systems and integrating the Ellipse-D into our vehicle has been essential in achieving the precision and reliability critical to our R&D efforts and autonomous operations,” said Oğuzhan Sağlam, Leo Drive’s sales manager.
Self-driving shuttles in South Korea
In 2022, Septentrio and SUM partnered for the joint development and technical application of a multi-sensor fusion system for autonomous driving. This led to the integration of Septentrio’s AsteRx-SBi3 Pro+ into SUM SMOBI platform vehicles.
Septentrio’s AsteRx-SBi3 Pro+ integrated into SUM’s autonomous vehicles.
The AsteRx-SBi3 Pro+ features Septentrio’s FUSE+ inertial sensor-fusion technology, which offers a comprehensive solution for these challenges. This includes centimeter-level positioning accuracy (horizontal: 0.6 cm + 0.5 ppm, vertical: 1 cm + 1 ppm) and integrated attitude accuracy (heading: 0.15°, pitch, and roll: 0.02° using a dual antenna set-up) to maintain precise vehicle operation. Additionally, the INS provides reliable speed data (0.02 m/s) for smooth and stable motion control.
In Gangneung, South Korea, a shuttle drives fully autonomously on the city’s roads. While a human driver is still required by law as a safety precaution, this is the first step to a more autonomous transport future.
SUM is collaborating with local governments to allocate bus routes for autonomous vehicles. The company operates autonomous buses on routes in Seoul, South Korea, including the Sangam Dong A2 autonomous vehicle for the Cheongwadae shuttle bus and late-night bus services. SUM also operates autonomous vehicles in Gangneung City.
According to members of the SUM team, this technology ensures accurate stops, optimal route planning, and improved passenger safety by minimizing the risk of collisions and ensuring timely arrivals. SUM’s autonomous shuttles and on-demand transit services benefit from precise positioning, allowing them to adjust routes dynamically based on real-time passenger requests and traffic conditions.
The benefits
According to SUM, coupling Septentrio’s AsteRx SBi3 Pro with SUM’s software and hardware solutions has unlocked many benefits, including:
Enhanced safety: Precise positioning and reliable navigation are paramount for the safety of all autonomous vehicles. Septentrio’s technology ensures accurate lane positioning and collision avoidance capabilities, safeguarding people and property across multiple sectors.
Greater reliability: Septentrio’s antennas ensure consistent and reliable performance for autonomous vehicles, even in challenging conditions. This minimizes downtime and disruptions.
Sustainable transportation: Autonomous vehicles can potentially reduce traffic congestion and emissions across the board. SUM’s technology, which is integrated into various autonomous vehicles, contributes to a more sustainable transportation future for cities and industries.
Additional application: Autonomous port operations
In ports around the world, many aging yard trucks are still being used. However, the industry has been gradually adopting automated port operations to move away from outdated positioning methods and toward autonomous solutions that can redefine operational standards.
Early attempts at using GNSS for positioning autonomous machines in ports faced significant challenges. The chaotic environment of large moving metal machines and constantly changing container stacks created blockage and multipath position errors, making it hard to achieve reliable centimeter-level GNSS positioning.
Modern GNSS technology has revolutionized port automation with its ability to achieve centimeter-level accuracy for autonomous trucks, forklifts and container carriers to navigate narrow lanes and confined spaces with unprecedented precision, dramatically reducing collision risks. Often, autonomous port vehicles must maneuver between cranes with minimal room for errors, highlighting the importance of reliable high-precision technology in the field. This level of precision and adaptability is vital in the logistics industry, given that 90 percent of the world’s goods are transported by sea and 60 percent are packed in large steel containers.
At the Port of Incheon in South Korea, which is on the Yellow Sea across from Northern China, SUM is conducting proof of concept (POC) trials of its autonomous vehicles using Septentrio’s AsteRx-SBi3 Pro+ rugged GNSS/INS receiver. The autonomous yard trucks at Incheon Port successfully navigate autonomously between point A and point B, with the SUM team nearby to identify and resolve any issues. The SUM team said they are focused on stabilizing the system to achieve a fully unmanned operation, aiming to enhance efficiency and automation in port logistics.
SUM notes that integrating Septentrio’s technology with autonomous vehicles in smart ports simplifies operations by providing accurate positioning, enhancing safety and optimizing routes, as well as improving overall port efficiency. The integration supports the seamless operation of autonomous vehicles, helping ports manage their logistics more effectively and respond to the dynamic demands of modern cargo handling.
The autonomous port trucks also are being tested with the new AntaRx-Si3 and AntaRx-AUX antennas installed simultaneously. High update rate logging can improve CPU load and how the antenna’s robust real-time kinematic (RTK) engine uses fewer satellites to reduce the CPU load.
Overcoming positioning obstacles
SUM’s advanced online localization system is designed to continuously track the position of its autonomous vehicles, even in GNSS-compromised environments.
“Our system leverages a sophisticated sensor fusion algorithm that primarily relies on high-accuracy GNSS/INS information from the Septentrio module,” said Daehyuck Park, Ph.D., managing director at SUM. “This module serves as the core source of our positioning data.”
To improve the robustness of the localization system, the company integrated additional sensors, including lidar and cameras. These sensors provide odometry data and facilitate map-matching using static landmarks in pre-mapped areas. By combining data from these sources, SUM explains that its system can perform reliable dead reckoning and offers precise map-based pose corrections to maintain high performance across various challenging environments.
One key challenge in this approach is the potential for GNSS blockages. To address this, SUM has incorporated dead reckoning technology into its systems, which augments the GNSS/INS module’s positioning capabilities by delivering continuous position estimates even when GNSS signals are unavailable.
Integrating vehicle localization systems further enhances dead reckoning by counteracting drift caused by biases in IMU measurements.
Additional sensors such as lidar can improve dead reckoning accuracy further, particularly during movements involving high wheel slips, which dilute the precision of wheel odometry. Despite these advancements, relying solely on dead reckoning for extended distances can lead to an unbounded accumulation of positioning errors.
According to the SUM team, Septentrio’s AsteRx SBi3 Pro+, coupled with SUM’s software and hardware solutions, has unlocked many benefits. Other urban use cases include enhancing delivery services by effectively managing routes and improving traffic management through fleet coordination. SUM adds that autonomous vehicles have the potential to reduce traffic congestion and emissions across the board. SUM’s technology, integrated with a variety of autonomous vehicle applications, contributes to a more sustainable future for our cities and industries.
SUM is continuing to focus on developing solutions to ensure accurate positioning and reliable autonomous operations in challenging environments. SUM and Septentrio aim to accelerate the integration of autonomous solutions to streamline port operations and autonomous vehicle applications in urban environments. The partnership is driving progress toward a more autonomous future, with the goals of reducing costs, increasing efficiency and adapting to the challenges posed by congested GNSS environments. Their joint efforts are being rigorously tested for accurate positioning throughout an autonomous vehicle’s entire journey, even in areas where GNSS signals may be compromised.
Saronic vessels equipped with advanced sensors in contested waters. (Photo: Septentrio / Saronic)
Anti-jamming and anti-spoofing technology protects receivers
Saronic, a Texas-based defense technology company, is leveraging the latest cutting-edge technology for their autonomous surface vessels (ASVs) designed for critical naval missions. These vessels are equipped with sensors for enhanced domain awareness in contested waters. They are designed for tactical deployment, alone or in collaborative swarms, via at-sea launch and recovery from expeditionary craft. Saronic selected Septentrio’s GNSS inertial navigation system (INS) receivers for resilient positioning and orientation for navigating in the most challenging environments. Advanced interference mitigation (AIM+) technology protects Septentrio receivers from jamming and spoofing attacks that threaten to disrupt GNSS-based navigation.
GNSS researchers presented hundreds of papers at the 2023 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 11-15, 2023, in Denver, Colo., and virtually.
The following four papers focused on ways to combat GNSS jamming and spoofing. The papers are available here.
GPS World will attend this year’s ION conference in Baltimore, Maryland on Sept. 16-20.
Approximating Regional GNSS Interference Sources Using ADS-B Data
The Automatic Dependent Surveillance-Broadcast (ADS-B) system, widely used for air traffic operations and management, also has potential applications in identifying, detecting and localizing (IDL) GNSS/RFI jamming sources in regions with high air traffic. With the rise in global GNSS interference reports, it is crucial to identify and eliminate jammers to ensure safe air travel operations.
The Navigational Integrity Category (NIC) value included in the ADS-B message is a key indicator for detecting potential jamming from ADS-B data. Although NIC is not the most effective metric for interference detection, it can still signal the presence of jamming and offer a means to localize the source in real time.
This research aims to approximate the area of GNSS/RFI interference by fitting a Euclidean Cone to ADS-B data that reports low NIC values. The problem is formulated as a convex optimization problem, derived from an alternative version of the maximum inscribed ellipsoid approach. By fitting an optimal cone to the data affected by interference, the cone’s apex indicates the estimated jamming location. The research team processed, decoded, interpolated and filtered ADS-B data to enhance localization accuracy.
The proposed convex formulation was tested on two reported interference events: one near Denver International Airport in January 2022, for 36 hours, and another near the Dallas-Fort Worth area in October 2022, over roughly eight hours. In Denver, four estimated jamming locations, calculated from four six-hour time windows, were grouped between downtown Denver and the airport. In Dallas, three estimated jamming locations, determined from three one-hour windows, showed a tighter grouping on the southern side of the Dallas/Fort Worth area, indicating spoofing was nearby.
Michael Dacus, Zixi Liu, Sherman Lo and Todd Walter, “Approximating Regional GNSS Interference Sources as a Convex Optimization Problem Using ADS-B Data.”
Hybrid Autoencoder for Interference Detection
Malfunctions or failures in GNSS services can result in significant personal, material, and financial damages. Early identification of anomalous behavior in GNSS signals can enable timely countermeasures. However, many interference monitoring or mitigation techniques are only feasible with high-end receivers and demand a certain level of expertise to be used effectively.
This paper presents a GNSS interference monitoring approach employing machine learning methodologies for users of any expertise level and with any type of GNSS receiver capable of outputting raw GNSS observations. The research team used simple signal-to-noise ratio (SNR) observations and different hybrid autoencoder models, including denoising or variational autoencoder combined with recurrent neural network (RNN) models, which are trained and tested on real jamming and spoofing events. The developed monitoring system is represented by a “traffic lights” system, indicating the severity or level of concern associated with each detected anomaly.
The results compare different RNN-based autoencoder implementations and have been tested on input data from high-end to low-end GNSS receivers. The analysis of the test set showed that there is a 95 percent probability of catching anomalies. Additionally, similar results were achieved when applied to other geodetic receiver types such as u-blox or JAVAD GNSS receivers. However, smartphone data is subject to some limitations. Notably, missed anomalies are primarily attributed to the low transmitting power from the jamming and spoofing devices, which poses challenges for detection.
Karin Mascher, Stefan Laller and Philipp Berglez, “Hybrid Autoencoder for Interference Detection in Raw GNSS Observations.”
A Tool to Monitor, Analyze and Record Navigation Signals
Given the heavy reliance on GNSS for numerous critical applications, any disruption caused by intentional or unintentional RFI could pose significant threats to operations that depend on these systems, from transportation and logistics to emergency services and national security. Developing advanced countermeasures against RFI has become a priority to ensure the functionality and resilience of GNSS-dependent systems.
This paper presents an architecture for real-time detection and classification of RFI affecting multi-band GNSS signals based on a machine learning method. The study proposes an architecture combining an actual GNSS monitoring station for recording GNSS signals — a Navigation Signals Monitoring, Analysis, and Recording Tool (N-SMART) system — with a deep neural network approach to detect and classify different classes of interferences.
Researchers propose a novel architecture for real-time interference detection and classification of RFI, which can continuously monitor and record multi-band GNSS signals and provide timely warnings in case of RFI. The proposed architecture utilizes the N-SMART system to capture and store the GNSS signals, while detection and classification are implemented using a deep neural network technique. The core principle of the suggested method is to implement a convolutional neural network (CNN) classifier inside a Docker container, running on top of the N-SMART system.
The results of the experimental test campaign on real interfered GNSS signals showed an overall accuracy of 85 percent, demonstrating the potential for effective, real-time classification of RFIs in GNSS. The research team explains that future work could focus on optimizing the model or exploring new architectures of CNN to improve accuracy and reduce task completion time across a variety of applications.
Iman Ebrahimi Mehr, Alex Minetto and Fabio Dovis, “A Navigation Signals Monitoring, Analysis and Recording Tool: Application to Real-Time Interference Detection and Classification.”
GNSS RFI Mitigation in Commercial Airborne Receivers
Reports from air navigation service providers worldwide indicate that commercial airborne GNSS receivers are increasingly being subjected to jamming and spoofing attacks. Consequently, there is a growing need to ensure that the raw GNSS measurements provided to aircraft systems are not compromised by spoofing. Validating these measurements is critical to maintaining the integrity and reliability of navigation systems used in aviation.
This paper focuses on two techniques under development by Collins Aerospace to be incorporated via a field-loadable software update to the Collins GLU-2100 multi-mode receiver to combat spoofing attacks. The first method, Receiver Autonomous Signal Authentication (RASA), uses the known characteristics of the GNSS receiver oscillator to detect whether the received signals are from a spoofer.
A second technique, Staggered Examination of Non-Trusted Receiver Information (SENTRI), uses the inertial sensor data already available from the aircraft’s IRS/INS, to monitor the coherence between pure GNSS, pure inertial (INS) navigation solutions or tightly coupled inertial GNSS hybrid solutions without augmentation. SENTRI further allows the computation of position integrity levels (HPL and VPL) in the presence of GNSS spoofers. The paper will describe the overall RFI mitigation architecture that is implemented on the GLU-2100.
RASA and SENTRI can be used together in a complementary fashion to detect the presence of spoofers reliably. It will also provide improved robustness to data spoofing attacks that induce errors in ephemeris, almanacs, GPS time jumps, etc., and will enable the GLU-2100 to coast through GNSS outages that are induced due to spoofing or jamming.
Future technologies will use antenna techniques, signal analysis, DFMC signals and APNT to increase the robustness to new and evolving threats. The goal of this RFI mitigation roadmap is to continue to ensure that GNSS can be used safely and reliably in civil aviation.
Angelo Joseph, Joseph Griggs, Patrick Bartolone, Bernard Schnaufer, Huan Phan, Vikram Malhotra, “GNSS Radio Frequency Interference Mitigation in Collins Commercial Airborne Receivers.”