All.Space, a provider of multi-orbit, multi-link satcom omplatforms, has been awarded €950,000 by the European Space Agency’s Navigation Innovation and Support Programme (NAVISP). The award is to develop an alternative position, navigation and timing (PNT) capability designed to operate in GNSS-denied environments.
The project will build a proof of concept for alternative PNT, harnessing All.Space’s multi-orbit terminal technology to generate and analyze signals of opportunity that can deliver position and orientation data independently from traditional GNSS sources.
The technology is designed to counter rising threats from GNSS jamming and spoofing – scenarios of increasing concern for both defence and commercial operators. Delivered in partnership with UK-based GNSS experts GMV NSL, the project is aimed at embedding a resilient PNT capability directly within the All.Space terminal, forming part of its growing software as a service (SaaS) portfolio.
“GNSS denial is no longer a hypothetical scenario,” said Paul McCarter, CEO at All.Space. “It’s a growing reality. With this project we’re developing a sovereign alternative that can restore confidence, capability and control in even the most contested environments.”
Once proven, the technology will be matured and commercialized as an integrated service offering, helping customers achieve operational independence and secure navigation in any domain.
ESA’s NAVISP programme is designed to spur innovation in navigation technologies and services across its Member States.
Mayflower Communications Company, a Massachusetts-based leader in advanced anti-jam system solutions for military and commercial markets, has been granted two U.S. patents — US 11,262,457 and US 12,235,365 — that significantly advance its GNSS anti-jam capabilities.
The patents expand Mayflower’s proprietary technology into signals of opportunity (SoOP), enabling interference suppression across both Iridium and GNSS frequency bands.
GPS remains a cornerstone of positioning, navigation and timing (PNT) for both military and commercial platforms. However, its vulnerability to intentional and unintentional jamming and spoofing has underscored the need for more resilient PNT solutions. Signals of opportunity — non-navigational RF signals not originally intended for PNT — can serve as valuable backups when GPS signals are degraded or denied. But like GPS, these signals are also susceptible to interference and require protection to be viable contributors to a resilient PNT framework.
Mayflower’s newly patented technology provides simultaneous protection of GPS and Iridium satellite signals within a compact, low size, weight and power (SWaP) footprint — critical for modern platforms operating in GPS-contested environments.
“The issuance of these seminal patents by the U.S. Patent and Trademark Office affirms Mayflower’s continued leadership in resilient PNT technologies for both military and commercial markets,” said Triveni Upadhyay, president of Mayflower. “Our innovative approach to filtering interference across multiple satellite communication systems — including Iridium — demonstrates our ability to meet the growing demand for GPS-alternative solutions. Leveraging signals of opportunity without significantly increasing SWaP is a key milestone in delivering more robust, operationally viable PNT systems. We’re excited to bring this technology to our partners across sectors.”
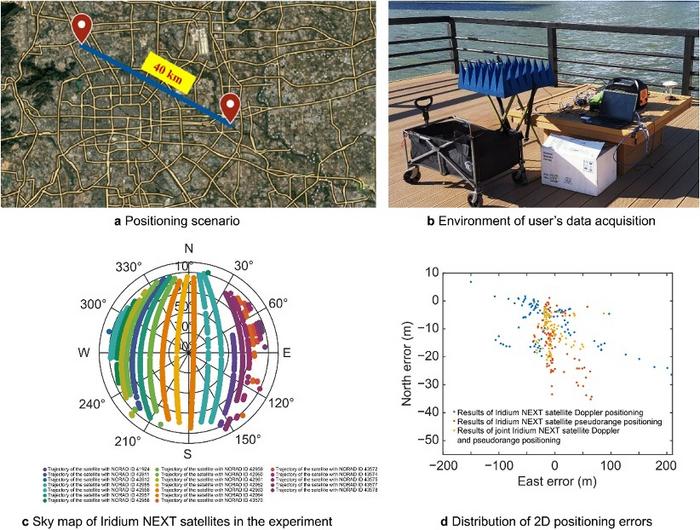
A novel method using signals of opportunity from low-Earth orbit (LEO) satellites is redefining what’s possible in satellite-based navigation. Researchers have developed a joint pseudo-range and Doppler positioning technique that taps into signals from constellations like Starlink and Iridium NEXT — without relying on traditional navigation signal structures.
By employing low-cost, wide-beam antennas and a specially designed time–frequency inversion algorithm, the team achieved remarkable accuracy: 3.6 meters in 2D and 6.2 meters in 3D, surpassing Starlink positioning approaches based on parabolic antennas by 35%.
Technical barriers in using signals of opportunity include signal transmission times, low signal power, and imprecise orbital data, all of which hinder accurate positioning. Addressing these challenges demands a new approach to extracting usable navigation data from LEO constellations.
In response, researchers from the Aerospace Information Research Institute introduced a joint pseudo-range and Doppler positioning method using wide-beam antennas to receive LEO satellite SOPs. The approach centers on a signal time–frequency inversion algorithm that reconstructs key signal parameters, alongside a novel accuracy metric called Equivalent Position Dilution of Precision (EPDOP).
Real-world experiments combining Starlink Doppler data and Iridium NEXT pseudo-range signals confirmed strong performance, especially in long-baseline conditions — reinforcing the method’s global applicability.
To overcome the cost and complexity of existing satellite tracking equipment, the team employed low-noise bock (LNB) wide-beam antennas capable of simultaneously receiving signals from multiple Starlink satellites. The core innovation lies in a signal processing algorithm that estimates transmission time and frequency from the received code phase and Doppler shifts — enabling both pseudo-range and Doppler observations without needing exact satellite clock data or real-time ephemeris.
To quantify system performance under real-world errors, the researchers developed the EPDOP metric, adapted to mixed measurement inputs. Tests demonstrated the method’s robustness: 3.6 m 2D and 6.2 m 3D positioning using Starlink Doppler signals, and up to 24 m (2D) and 41 m (3D) accuracy using Iridium NEXT SOPs over a 40 km baseline. Compared to Doppler positioning techniques, the algorithm reduced positioning errors by over one-third and successfully suppressed the impact of orbital inaccuracies inherent in public two-line element set (TLE) datasets.
“This work marks a key step toward accessible, accurate navigation using commercial satellite constellations,” said lead author Ying Xu. “By integrating Doppler and pseudo-range measurements and introducing a flexible precision metric, we can now harness Starlink and Iridium NEXT signals for high-precision positioning, even without access to proprietary signal structures. The proposed low-cost architecture opens new possibilities for resilient navigation in GPS-denied environments.”
Because of its ability to operate with low-cost antennas and weak, unstructured signals, the technique is poised to support a wide range of applications: from autonomous driving and unmanned aerial vehicle (UAV) navigation in remote regions to emergency response and IoT asset tracking. Its resilience to satellite orbital prediction errors and adaptability across different LEO constellations make it a strong contender for next-generation positioning systems. As LEO deployments continue to expand globally, this approach offers a scalable and practical solution for real-time, high-accuracy navigation—promising enhanced capabilities for both civilian infrastructure and defense operations.
Integrity Monitoring of LTE Signals of Opportunity-Based Navigation for Autonomous Ground Vehicles
By Mahdi Maaref, Joe Khalife and Zak M. Kassas/University of California, Riverside
FIGURE 1. RAIM framework for LTE-based navigation without GNSS signals. (Images: Authors)
Proprietary receivers and navigation frameworks for autonomous ground vehicle (AGV) navigation with long-term evolution (LTE) cellular signals demonstrate meter-level accuracy with standalone LTE signals and lane-level accuracy with LTE signals coupled with other sensors (inertial and lidar).
As the number of systems that rely on cellular signals for navigation grows, the need for monitoring the integrity of their navigation solution becomes essential.
This paper proposes a receiver autonomous integrity monitoring (RAIM) framework for AGV navigation with LTE signals of opportunity. Experimental results evaluate the efficacy and accuracy of the proposed RAIM-based fault detection and exclusion technique, demonstrating a reduction of 22% in the position root-mean-squared error (RMSE).
FIGURE 1 demonstrates the RAIM framework: (a) When GNSS signals are unusable, LTE signals are used for navigation and integrity measures are calculated; (b) simulation results of downtown Riverside, California, where the black regions represent areas where multipath is expected to exceed 0.5 meters; (c) experimental setup; (d) environment and location of LTE towers; and (e) experimental results showing severe multipath being autonomously detected and excluded.
The estimation error represents the difference between the ground truth from an RTK GNSS-IMU system and our LTE-IMU system.
The military is always looking at new techniques and technology for deriving position and, it seems, every few years signals of opportunity (SOOP) becomes fashionable again.
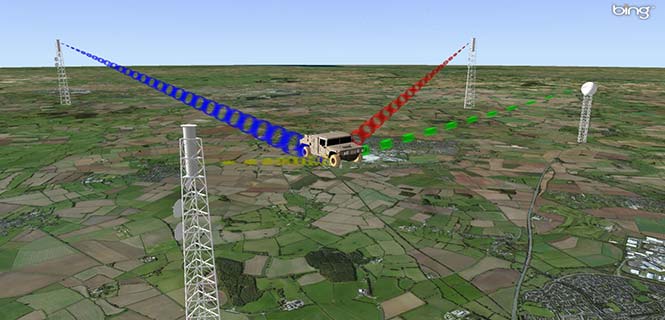
In broad terms, SOOP refers to the use of any signals for navigation, which are not normally intended for navigation. This might mean TV or radio broadcast signals, cellular network signals, or anything else you can receive.
Figure 1. Navigating using opportunistic signals, such as phone, TV and radio transmissions. (Image: Michael Jones)
The promise of SOOP
In the quest for resilient positioning and navigation, SOOP certainly sounds attractive. When GPS goes down, why not simply continue to navigate by receiving digital TV signals instead? Why not receive a whole pile of different signals, and make yourself virtually immune to jamming?
You can even turn jamming from a problem to a solution. If someone does decide to turn on a bunch of jammers, why not use the jammers themselves as signals of opportunity, and position yourself using those? With so many possibilities, it’s no wonder SOOP excites people. Certainly it’s of great interest to the military of many countries.
Let’s dip our toes into the world of opportunistic navigation.
What signals might we use?
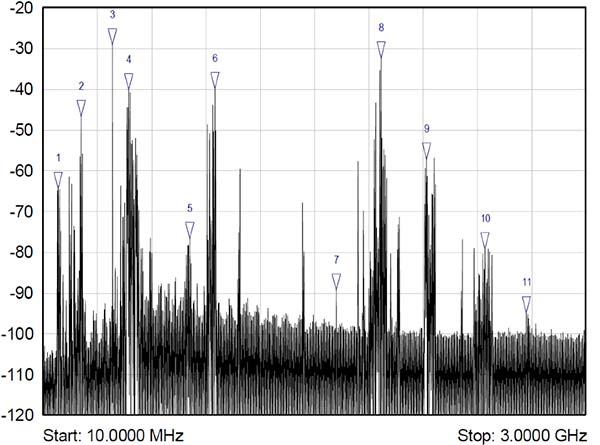
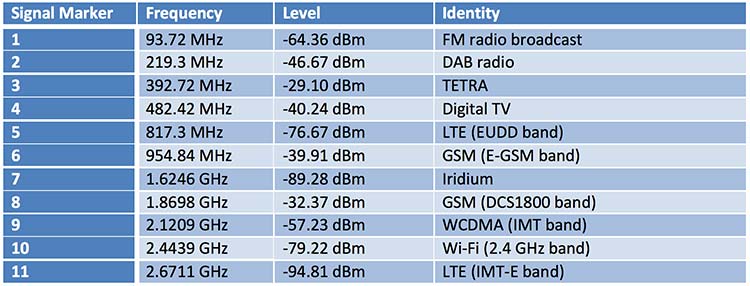
The figure below shows what we get if you use a spectrum analyzer to quickly sample what’s on the airwaves in the UK, in this case looking fairly coarsely from 10 MHz to 3 GHz. A number of candidate signals immediately present themselves, which are labeled 1 to 11 and identified in the table.
Figure 2. Plenty of opportunistic signals are out there. (Image: Michael Jones)
There are, of course, many more signals-of-opportunity out there, but this illustrates a few of the more visible ones. How do we go about using these signals for positioning ourselves?
Bringing in defense techniques
For decades, one of the principle requirements in electronic warfare (EW) has been to geolocate enemy transmissions. This has given rise to a plethora of techniques for determining location, such as received signal strength (RSS), angle-of-arrival (AOA), time-of-arrival (TOA), time difference of arrival (TDOA), frequency difference of arrival (FDOA), and so on.
In a positioning application, we have the reciprocal problem: instead of trying to geolocate a transmitter relative to ourselves, we are trying to geolocate ourselves relative to a set of transmitters. But of course we use the same techniques: GPS is an excellent example of a TOA system.
Let’s look at the basics of TDOA. A signal s arriving at location 1 can be expressed as
where A1 is an amplitude scaling to account for attenuation over the path, n1 is additional noise, and d1 is the signal delay time. We can repeat the equation for further locations:
Usually we designate one location as the reference, in which case we can rewrite the above equations as:
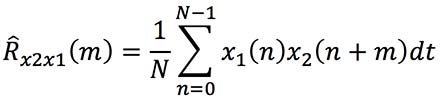
The first problem is to determine D, the time difference of arrival. There are many ways to do this, but a popular method is to perform generalized cross-correlation:
Or, in a realizable digital form:
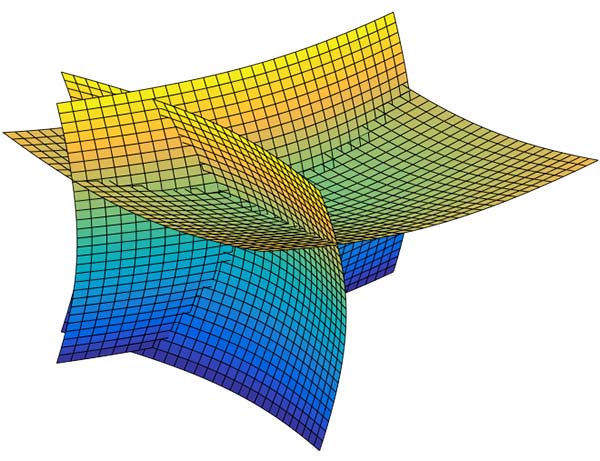
Finding the peak of this function gives us our estimate of the time difference D. It’s a little bit more involved in practice, as we would normally apply filtering functions to improve the TDOA resolution, but you get the idea. Each TDOA measurement gives a set of possible locations that form a hyperboloid. With three stations, we will have two hyperboloids, the intersection of which gives a set of possible locations along a hyperbola. The addition of a fourth signal allows us to plot three hyperboloids, from which we can then determine position.
Figure 3. Positioning using TDOA involves solving for the intersection of hyperboloids. (Image: Michael Jones)
There are various ways to solve for the hyperbolic intersections. With only four measurements it is possible to compute the solution analytically, but with many measurements an iterative approach or minimum mean squared error technique is often used.
TDOA, when used properly, can form the basis of a highly accurate positioning system. A number of navigation systems utilize TDOA technology, such as LORAN and its variants.
Now let’s consider angle-of-arrival. AOA techniques generally make use of an antenna array to provide spatial diversity, allowing the direction of a source transmission to be determined. Measured angles to multiple transmitters then allows triangulation to be performed and the position computed. There are some advantages to AOA techniques, when compared to TDOA: position can be computed with as few as three signals, there is no requirement for time synchronization in any form, and narrowband signals can be used without loss of accuracy. Disadvantages include larger physical size due to the use of an array of antennas, and potentially more susceptible to environmental effects such as multipath.
Classical AOA methods include Capon’s method, but since the 1980s the preferred techniques have often been signal subspace methods such as Multiple Signal Classification (MUSIC), Estimation of Signal Parameters by Rotational Invariance Techniques (ESPRIT), and variants of these techniques. The most well known of the subspace methods, MUSIC, performs an eigendecomposition of the sample covariance matrix given by:
Once the signal and noise eigenvectors have been separated the array manifold is projected into the appropriate subspace to yield the MUSIC surface:
The peaks of the function P, give us the direction-of-arrival of any signals. From these multiple lines of bearing we can perform triangulation, and derive our position.
We’ve looked at TDOA and AOA methods, which are just two of many techniques that can be used to process signals-of-opportunity to derive position. But there are some perceived drawbacks to navigation by SOOP. By definition, SOOP makes use of transmitters that are uncooperative, and not generally designed with navigation in mind.
For TDOA you are dependent on signals that are transmitted synchronously (or else you need a separate source of reference), which may or may not be the case. You also need to know the locations of the various transmitters, for example the coordinates of any GSM base stations, digital TV transmitters, and so on. It may be difficult to obtain this information, especially in some parts of the world. But whilst it certainly helps to have this information, it isn’t entirely necessary. It is possible to both position yourself, and build up a map of the transmitter locations, without a-priori information.
SLAM
Simultaneous localization and mapping (SLAM) is a field popular in the autonomous vehicle and robotics communities. It’s often described as a machine-learning concept, which aims to solve the problem of positioning oneself within a map, whilst simultaneously constructing and updating that map. There are a pile of techniques and algorithms that have been applied to the problem, including the good old Kalman filter, and the particle filter.
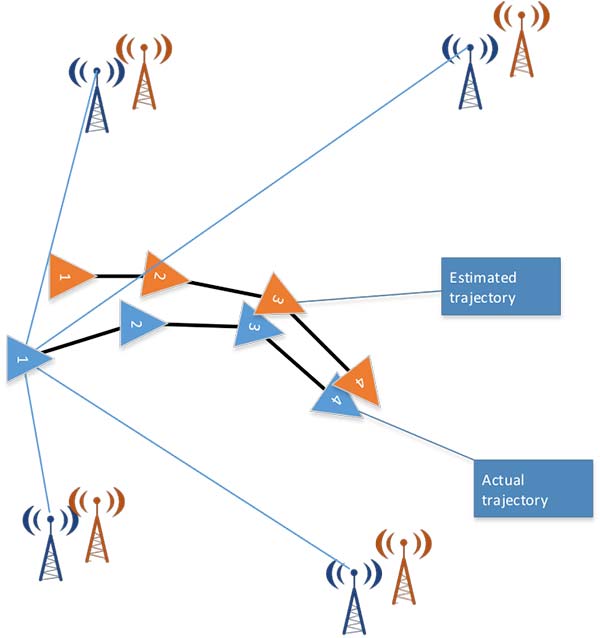
In basic SLAM, you use a state vector to store an estimate of your position (and often orientation as well), just as you would in a typical GPS receiver. However, in SLAM, we also store estimates of the transmitter positions (called “features” in SLAM terminology). If we want to localize ourselves in a global coordinate frame it does mean we need an initial estimate of our position from some other means, like GPS. Otherwise we can only localize ourselves within the map we are generating.
From our initial position estimate, we then move in some way. We then estimate our position again, perhaps using some form of dead reckoning technique, like inertial or visual odometry. Together with our motion model, this forms the prediction phase of the Kalman filter. We perform the measurement phase by re-measuring any features (our transmitters of opportunity), along with any new ones.
Figure 4. Basic SLAM concept: simultaneously estimate the locations of both the vehicle and the transmitters of opportunity. (Image: Michael Jones)
If you know about Kalman filters, you might spot one of the problems with SLAM: As the number of features increases, the size of the state vector becomes larger, until you end up with huge matrices that are very time-consuming to solve. The solution time is a quadratic function of the number of state variables. For this reason, it is often necessary to constrain the problem in some way: perhaps by limiting the number of transmitters we keep track of.
But when done properly, SLAM is a powerful technique for signals-of-opportunity navigation.
Is SOOP worth it?
We’ve seen that, by using a variety of techniques, almost any radio signal can be used for opportunistic navigation purposes.
One disadvantage of SOOP is that it can require complex hardware to do it well. If you truly want to use all the opportunistic signals out there, then you need a receiver that can handle a very wide range of frequencies. You also need an antenna or set of antennas that can do the same.
When resilient PNT is a critical military requirement, you cannot afford to rely on signals that you don’t control. SOOP is also highly dependent on where you are. There aren’t many opportunistic signals at sea or in the desert, compared to in the urban environment (perhaps the odd satellite signal, or HF signal).
So SOOP is unlikely to become a primary technology for the military. But it does have the potential to be a powerful augmentation to GNSS, and it certainly deserves a place in the PNT kit bag.