GNSS researchers presented hundreds of papers at the 2024 Institute of Navigation (ION) GNSS+ conference, which took place Sept. 16-20 in Baltimore. The following papers focused on lunar and space applications. The papers are available here.
Clock and Orbit Determination for LEO Satellites
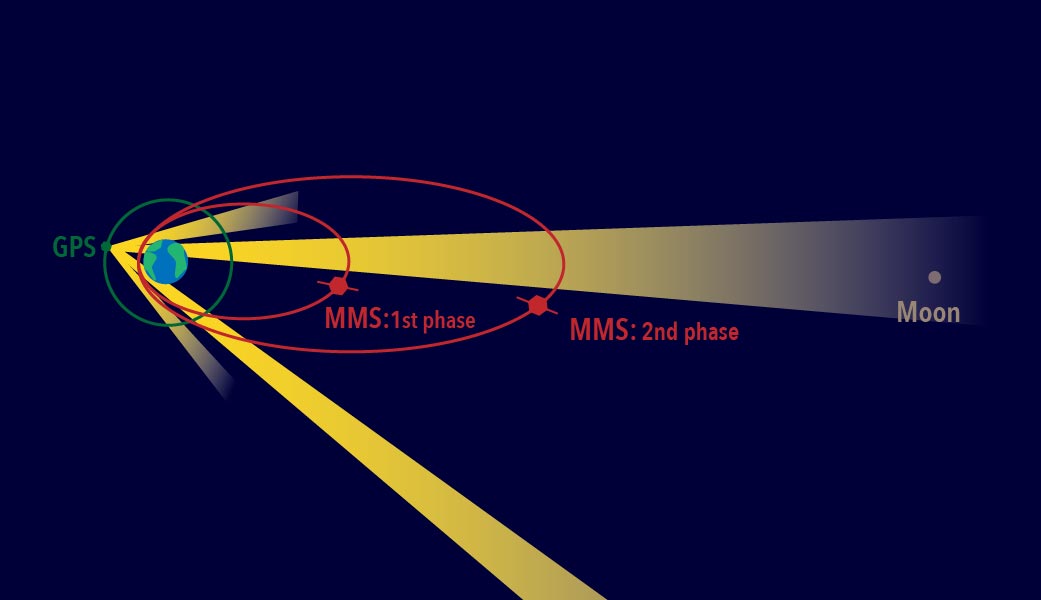
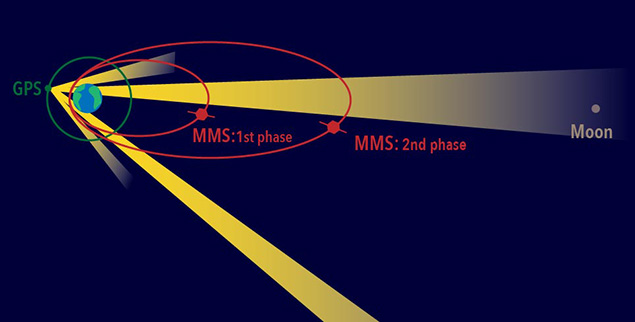
More than 50 years after the Apollo program, there is a growing interest in establishing a sustainable human presence on the moon, with various missions being planned in different lunar orbit regimes to support lunar exploration. To address the challenges of navigation in the lunar environment, researchers have proposed a technique leveraging time-differenced carrier-phase (TDCP) measurements from GPS satellites, which offer millimeter-level accuracy when integer ambiguities are correctly fixed.
The proposed framework utilizes an extended Kalman filter that combines intermittently available terrestrial GPS TDCP values with gravitational accelerations predicted by an orbital filter. To handle the unique challenges of the lunar environment, such as weak gravity and strong third-body perturbations, the researchers implement an adaptive state noise compensation algorithm and introduce an augmented state vector to address time correlations across TDCP measurements. Through Monte Carlo simulations of lunar satellites in various orbits, the technique demonstrates improved positioning and onboard timing accuracy compared to pseudorange-only navigation solutions.
Keidai Iiyama, Sriramya Bhamidipati and Grace Gao, “Precise Positioning and Timekeeping in a Lunar Orbit via Terrestrial GPS Time-Differenced Carrier-Phase Measurements.”
Satellite Ephemeris Parameterization for Lunar Navigation
This paper explores the development of satellite ephemeris parameterization methods for lunar navigation systems. As space agencies plan to establish satellite networks around the moon for communication and positioning, navigation and timing (PNT) services, the authors investigate optimal techniques for efficiently and accurately broadcasting satellite ephemeris data to lunar users. They propose a framework that directly approximates satellite position and velocity in the inertial frame, using signal-in-space-error requirements as constraints to guide the search for the best ephemeris parameter set.
The study evaluates different methods based on ephemeris prediction precision, fit interval and message size. It demonstrates the framework’s ability to approximate satellite ephemeris for both low lunar orbits and elliptical lunar frozen orbits while meeting signal-in-space-error requirements. The research considers polynomial and Chebyshev basis types for surrogate models and evaluates performance based on precision and orbital coverage. By quantifying the broadcast message’s fit interval and size, the authors aim to guide the selection of optimal parameterization methodologies for lunar navigation systems.
Marta Cortinovis, Keidai Iiyama and Grace Gao, “Open Access Satellite Ephemeris Parameterization Methods to Support Lunar Positioning, Navigation, and Timing Services.”
Improving Navigation Accuracy in GEO
The authors introduce a new approach to improving the accuracy of satellite position determination in geostationary equatorial orbit (GEO). They propose integrating a regional navigation satellite system (RNSS) with GNSS. Specifically, they suggest using RNSS signals, such as those from the Quasi-Zenith Satellite System (QZSS), to complement the signals provided by GNSS for GEO satellites.
The research addresses the challenges faced by GEO satellites in using GNSS signals, including poor dilution of precision (DOP) and significant radial errors due to limited observability. By incorporating RNSS signals, the researchers aim to improve the diversity of signal directions and enhance navigation precision. The paper demonstrates the feasibility of receiving QZSS signals across a substantial range in GEO through link budget analyses. Two comprehensive simulations were conducted: a point solution and an extended Kalman filter-based orbit determination. The results confirm the anticipated improvement in navigation precision indicated by the DOP analysis.
While RNSS signals can be received from any longitude in GEO, enhanced navigation precision depends on the distance between the satellite and the RNSS. The authors suggest that this concept can be adapted to various longitudes within GEO by selecting appropriate RNSS options and promoting stable, high-precision navigation.
Yu Nakajima and Toru Yamamoto, “Enhancing Navigation Accuracy in a Geostationary Orbit by Utilizing a Regional Navigation Satellite System.”
Integrating Orbit and Attitude Precision for CubeSat Positioning
This research paper addresses ways to enhance CubeSat capabilities for demanding missions, particularly in low Earth orbiting positioning, navigation and timing (LEO-PNT) systems. The authors propose an array-aided combined precise orbit and attitude determination model that offers an optimal solution to improve orbital accuracy and provide reliable attitude information. By utilizing multi- and affine-constrained models for precise attitude determination and reconstructing highly precise observations for an antenna array, the method addresses the challenges of higher orbital accuracy and reliable attitude information required for advanced applications.
The authors recorded significant improvements in orbital accuracy and attitude determination. Validation results show that reconstructed observations outperform original ones, leading to improved orbital components with a three-dimensional root mean square (RMS) of 4.1 cm. Additionally, observation residuals are smoother, with an RMS of 6 mm, half of that obtained via a single antenna. The results show a promising solution for enhancing CubeSat capabilities, particularly for applications requiring high-precision orbit and attitude information.
Amir Allahvirdi-Zadeh and Ahmed El-Mowafy, “Array-Aided Precise Orbit and Attitude Determination of CubeSats using GNSS.”