Which GNSS constellations do most receivers currently use? How is that mix changing?
“Most modern commercial receivers today are moving to receive all GNSS signals: GPS, GLONASS, Galileo, BeiDou, QZSS, IRNSS and so forth. Also important, in which bands does the receiver operate, and how many channels does it have for optimum accuracy and quicker cold start? Application and location for local stability are also factors. If the operation is in India, IRNSS would be important, in Japan QZSS, and so forth.”
— Ellen Hall Imminent Federal
“The current standard in commercial receivers is to exploit the interoperability between the various GNSS signals and to make use of all satellites in view, regardless of their constellation. While the L1/E1/B1 frequency band continues to be the primary frequency in almost all GNSS systems, the legacy L2 band is gradually losing its importance as most satellites are already broadcasting more advanced signals in the L5/E5 band.”
— Jean-Marie Sleewaegen Septentrio
“The newest phones offered by Google and the largest manufacturers in the world — Apple, Samsung, OPPO and Vivo — support the following positioning systems: Google — Pixel 7 and Pixel 7 Pro: GPS, GLONASS, Galileo, BeiDou, QZSS, and other // Apple — iPhone 14: GPS, GLONASS, Galileo, QZSS, and BeiDou // Samsung — S23 and most other recent versions: GPS, Galileo, GLONASS, and BeiDou // Xiaomi — Xiaomi 13 Pro: GPS (L1+L5), Galileo (E1+E5a), GLONASS (G1), BeiDou, NavIC (L5A-GPS supplementary positioning) // OPPO — F21: GPS, A-GPS, BeiDou, GLONASS, Galileo, and QZSS // Vivo — Vivo X90: GPS, A-GPS, GLONASS, Galileo, BeiDou, QZSS, NavIC, Cell ID, Wi-Fi. // For farming, John Deere’s SF-RTK uses GPS, GLONASS, BeiDou and Galileo.”
— Bernard Gruber Northrop Grumman
“All modern generation cell phones use virtually all GNSS signals. This includes GPS, Galileo, GLONASS and BeiDou. In addition, they receive the correction signals, such as WAAS and EGNOS. This capability is embedded in the chips that are currently used. We are told that they have the capability to track on the order of 50 satellites at once. We expect that dual frequency is close to realization and the use of the new civil L5 signal will make cell phones even more capable.”
— Bradford W. Parkinson Stanford Center for Position, Navigation and Time
How is the completion of Galileo and BeiDou affecting the development of autonomous vehicles?
Ismael Colomina, chief scientist, Geonumerics
“GNSS has had a limited impact on the development of AVs because their developers regard it as insufficiently accurate, reliable, and ubiquitous. Only a minority of them are aware of the benefits that the new/modernized constellations bring. More and improved signals and new services— both commercial and public—such as Galileo’s HAS, NMA and CAS will enable and complement visual, lidar and radar sensors for SAE levels of automation 2 and higher and for ASIL D safety levels.” Ismael Colomina GeoNumerics
Ellen Hall, Spirent Federal System
“Safety is critical to the implementation of AVs and this safety relies upon PNT accuracy, availability and robustness. These three requirements all benefit from constellation diversification in terms of multiple signals, frequencies, satellites, and constellation providers. In addition to the four civilian signals available on three frequencies from the GPS constellation, signals from Galileo and BeiDou provide suitably equipped receivers with extra satellites, signals and ground segment diversity.” Ellen Hall Spirent Federal Systems
Brad Parkinson
“The economic potential of self-driving vehicles is the major driver for their development. Can they be made affordable, safe, dependable, and useful? More operational GNSS constellations may help resolve these issues favorably, but GNSS progress should not significantly influence the large number of developers. My favorite such application is long-haul trucking, which may have some very favorable profit and safety benefits.” Bradford W. Parkinson Stanford Center for Position, Navigation and Time
The 10-day school will cover all aspects of satellite navigation, up to and including the creation of a satnav-based business. It is open to graduate students, Ph.D.s and postdoctoral researchers, as well as young engineers and academics working within industry or agencies, aged 35 or younger.
The number of participants is limited to 50, on a first-come, first-served basis.
Internationally renowned scientists and specialists will be giving lectures as well as overseeing practical exercises and lab work.
Participants will receive a full-spectrum overview of satellite navigation, starting from the theoretical basis of Global Navigation Satellite Systems, their signals, the processing performed by signal receivers and how the position-navigation-time solution is worked out.
Also discussed will be threats to the satnav systems, such as spoofing or jamming, and countermeasures available against them, along with back-up navigation solutions for a GNSS-denied environment.
Practical exercises will include receiving the various satnav constellations now in orbit — including Europe’s Galileo — to give course members direct, hands-on experience.
In addition, lectures will cover business aspects, including patents and intellectual property rights.
The main emphasis of the course will be the development of a group business project, building on an innovative idea to take in the planning of the product or service, its technical realisation and finally its marketing to customers.
Image: Summer School
The school takes place in cooperation with Stanford University in the United States, the Institut Supérieur de l’Aeronautique et de l’Espace ISAE-SUPAERO in Toulouse, France, Graz University of Technology in Austria, and the University FAF Munich in Germany.
Austria is this year’s host nation, and the summer school is supported by Graz University of Technology and the Austrian Institute of Navigation.
Just over three weeks remain to apply to the Mobile Monitoring Challenge (MMC), led by Stanford and the Environmental Defense Fund (EDF) with technical advice from ExxonMobil.
There’s a big push to develop mobile technologies to monitor and quantify methane leaks at oil and natural gas sites. Mobile monitoring offers the promise of surveying highly dispersed industrial facilities — including smaller and older ones — quickly and effectively.
Stanford and EDF, aided by industry and other expert advisors like those from ExxonMobil, will rigorously field test and compare the most promising new mobile technologies and approaches submitted via the MMC – with extra interest in commercially scalable options. Results will be published in peer-reviewed journals.
Details on the competition, what is required, and the benefits of applying can all be found here.
By Christopher Ball, 412th Test Wing Public Affairs
What happens when GPS isn’t available?
A collection of U.S. Department of Defense units and universities found out when they gathered at Edwards Air Force Base, California, to evaluate various aerial platforms in a degraded GPS environment this summer.
The week-long test event called DT NAVFEST — short for Developmental Test Navigation Festival — was the first large-scale program of its kind, according to James Cook, KC-46A project manager with the 418th Flight Test Squadron.
“DT NAVFEST was established to provide a locally more realistic GPS jamming environment in which aircraft platforms and unmanned aerial vehicles could evaluate their performance under a degraded GPS signal,” Cook said. “Other locations around the U.S. provide such environments, but having it locally allowed for direct program input and cost savings to customers by not having to deal with the logistics costs of deploying to those locations.”
Cole Johnson, technical lead for NAVFEST, explained how they create a degraded GPS environment.
“GPS signals are super faint,” he said. “Imagine a 30-watt lightbulb 12,000 miles in space. So it doesn’t take much interference for your smartphone’s GPS to lose lock on such a low power signal. Interference could occur from walking in a dense forest, through a canyon, inside a building, driving among skyscrapers, or from GPS jammers. The end effects of GPS jammers aren’t much different than the other causes of interference, they all make it harder for your GPS receiver to pick out faint GPS signals from the air, except jammers do it by adding noise to the environment.”
Teams from the University of Illinois Champagne Urbana and Stanford University were invited to the first-ever DT NAVFEST at Edwards Air Force Base to test their projects in a GPS degraded environment. (Photo: U.S. Air Force/Wei Lee)
The GPS jammers and support came from the 746th Test Squadron at Holloman Air Force Base, New Mexico.
According to Wei Lee, test safety engineer with the 412th Test Wing, the universities were invited to participate in DT NAVFEST on a trial basis with the hope of expanding to other institutions in the future.
“Live GPS jamming data is extremely difficult for academic labs to obtain due to the complexity of working with the Federal Aviation Administration and regional first responders,” Lee said. “It is crucial that the Department of Defense support basic research and development that is ongoing in our nation’s top academic institutions. Many of the low technology readiness level projects will eventually migrate from academic labs to defense industry and military applications. Allowing the labs to participate on a non-interference basis is a win-win situation.”
To minimize the effect on the local community and air traffic, planning of the GPS jamming was initiated months in advance. According to Johnson, the GPS jammers had a vertical reach of upwards of 30,000 feet, so the first step was contacting the FAA, which provided a list of “green” times when commercial air traffic was at its lowest. This led to the testing being performed between 1 and 6 a.m. on test days.
Johnson said the team performed extensive modeling and simulation to identify how far the GPS interference would reach. “Not just at 30,000 feet, but ground level as well.”
The models suggested a small part of the Antelope Valley — a couple of small towns around Edwards — could be affected. “We wanted to err on the side of caution, so we constructed a huge list of emergency services from the Antelope Valley to contact.”
The team also set up phone lines the FAA and any emergency service could call up during testing and request the jammers to be turned off.
The 746th Test Squadron from Holloman Air Force Base, New Mexico, provided an array of GPS jamming equipment and support for DT NAVFEST at Edwards Air Force Base. The jammers provided a degraded GPS environment for testing multiple aerial platforms throughout the week. Testing was done from 1 to 6 a.m. each day to minimize impact on the community and civilian air traffic. (Photo: U.S. Air Force/Cole Johnson)
Cook said the event was extremely successful, judging by the feedback from the customers.
“For a first-of-its-kind event, it executed fairly smoothly, thanks to the test team and customers’ direct involvement,” he said. “The technical knowledge and support from the 746th TS was awesome. And the support given to this program from 412th Test Wing all the way down to the Airman on the ground providing direct support.”
NovAtel Inc. has placed a research contract to determine how GNSS technology can deliver a positioning solution that meets both the safety and accuracy requirements of unmanned automotive vehicles.
The research will include study concepts for high-precision, high-integrity carrier phase algorithms as well as threat models and safety monitors with the purpose of improving the safety of autonomous land transportation.
Sponsoredby: NavCom Broadcast date: Thursday, May 21, 2015 Moderator: Alan Cameron, Editor-In-Chief and Publisher, GPS World Speakers: Donald Chance Mark Jr., Aviation Attorney, Fafinski Mark & Johnson; Tony Murfin, Professional OEM & UAV Editor, GPS World; James Spicer
UAV Researcher, Stanford University; Adrien Perkins, UAV Researcher, Stanford GPS Laboratory; Peter Cosyn, Director of Research & Development, Gatewing, a Trimble company Summary: Explosive growth in the Unmanned Aerial Vehicle (UAV) market segment and an unsettled regulatory framework make for a confusing picture. Our experts will clarify the confusion, explain product design trends and describe in detail the operation of one new micro-UAV in particular. With the industry poised for the opening of the regulation floodgates to address a growing commercial demand, we will hear from developers, both independent and at large GNSS companies, and from a legal expert who will discuss today’s and tomorrow’s likely regulatory framework. Attendees also will learn how robust, cost-effective Hybrid GNSS Technologies offer unique capabilities for UAV navigation in environments where traditional GPS receivers may fail. Tony Murfin answers submitted questions in this post-webinar report.
A fully autonomous, unmanned aerial vehicle (UAV)-based system for locating GPS jammers, currently under development, seeks to localize a jammer to within 30 meters in less than 15 minutes in an area comparable to that of an airport. Ultimately, the design team targets the ability to locate multiple, simultaneous jammers, and navigate in intermittent GPS and GPS-denied environments using a combination of GPS and alternate navigation aids. The system should be inexpensive and built from commercially available or open-source parts and software.
By James Spicer, Adrien Perkins, Louis Dressel, Mark James, Yu-Hsuan Chen, Sherman Lo , David S. De Lorenzo and Per Enge, Stanford University
The aviation community worries about GPS jamming. Recently, it struggled to find so-called personal privacy devices on Newark’s Liberty International Airport and traveling the nearby New Jersey Turnpike.
A number of unintentional jamming incidents took a long time to resolve. The disruption from an intentional, malicious jamming attack could be far worse. Airport authorities should be prepared to locate and shut down a coordinated attack by numerous jammers capable of disrupting the GPS service over an entire airport.
The closure of a major airport for the many hours or days it would take to locate even a couple of backpack-sized transmitters would be not only be highly disruptive in flights delayed or diverted, it would negatively impact the confidence of the flying public.
Any system in place to mitigate this threat must be inexpensive enough to be deployed at least at the nation’s major commercial airports, autonomous enough to be operable with limited training and certification, and rapid and accurate enough that a jammer can be routinely apprehended by ground-based law enforcement. It must be able to navigate successfully in GPS-denied environments using alternative position, navigation and timing (APNT), and have the range and capacity to search an airport-sized area as well as the approach corridor leading to runway touchdown.
This article describes such a system and device presently in research and development: the Jammer Acquisition with GPS Exploration & Reconnaissance (JAGER).
Vehicle Design and Operation
The JAGER UAV is a based on a commercially available, multi-rotor airframe modified to suit the mission specifications. The 1.2-meter diameter octocopter has a maximum takeoff weight of 11 kilograms (24.2 pounds), a top speed of 20 meters/second (m/s, 45 mph), and can fly unloaded for up to 30 minutes.
We have replaced the battery tray with our own carbon fiber design that allows us to carry 16 Ah of lithium polymer batteries for a maximum power draw of 4 kW. This extra capacity means that even with a 5-kilo experimental payload, the present craft can remain aloft for up to 15 minutes without recharging.
The payload plates are also custom-made from carbon fiber, and it is to these that the UAV’s experimental payloads are mounted (see FIGURES 1 and 2). One payload plate is flown at a time, and is secured on top of the airframe with a quick-release mechanism. This modularity allows for individual experiments to be mounted to their own payload plate and ground-tested before being secured to the UAV. Different experiments can be switched out rapidly for efficient use of battery capacity and flight time.
Figure 1. (A) Diagram of the payload plate showing regularly spaced mounting holes. (B) Plate with APNT experiment mounted. (C) Payload plate / experiment assembly secured atop JAGER UAV.Figure 2. Image of the vehicle showing the battery tray slung beneath the central body, the APNT experiment and payload plate secured on top, and the jammer-hunting antenna mounted at the front.
The plate itself also offers flexibility for component mounting. Regularly spaced, threaded holes across the plate mean components’ positions can be easily changed to find an optimal configuration. This can be particularly useful for minimizing interference between computers and noise-sensitive components such as antennas and magnetometers.
Software. We modified existing, open-source autopilot software to fly the mission. The craft is fully capable of completing a mission autonomously, but also can be taken over by a human pilot if necessary. A ground station also can be used to send commands to the octocopter, but is primarily used to monitor UAV location, battery life, and jammer belief state.
The autopilot software also has been adapted to communicate with various vehicle payloads. Experiments using APNT equipment, for example, pass their data to the autopilot, which will combine these signals with its own GPS data for accurate navigation in areas where the GPS signal might be intermittent or unreliable. In return, the autopilot can be used to pass data to experiments reliant on altitude, attitude, atmospheric pressure or location information.
The ground station monitors instruments’ data and status in real time. This not only allows for control of airborne experiments, but also straightforward ground testing. Synthetic autopilot data can be fed to an experiment to ensure that all systems are performing correctly before they are mounted on the vehicle for flight tests.
APNT Overview
Key to navigating in a GPS-denied environment is the use of signals from APNT networks for location determination. The proposed system should be able to navigate using any or all available APNT signals, and should weight each one according to its strength and reliability in order to formulate the most accurate estimate of both its own and the jammer’s position.
Here we describe the use of the universal access transceiver (UAT) and distance measuring equipment (DME) network for our APNT signals. The UAT signal has been implemented by the Federal Aviation Administration (FAA) in the United States as part of automatic dependent surveillance–broadcast (ADS-B), and is transmitted through a network of terrestrial ground stations.
The ADS-B network was only completed across the contiguous United States in 2014, so it is new compared to established cellphone networks. It is more comprehensive than many other terrestrial systems, so that coverage of most airports is guaranteed. While GPS reception requires an unobstructed view of the sky, UAT reception requires a direct line of sight to a transmitting tower. However, the flatness of terrain surrounding most airports as well as the UAV’s airborne vantage point ensures that UAT signals will probably be visible throughout most jammer-seeking missions.
The APNT equipment used for navigation by the JAGER UAV consists of UAT (978 MHz), DME (982 to 1213 MHz), and GPS (1575.4 MHz) antennas, a multichannel transceiver to combine the two signals, and a computer for data processing (see FIGURE 3). A dedicated lithium-ion battery powers the entire APNT payload. The current system does incorporate GPS to estimate the time offset, but future iterations of the system will derive time from sources other than GNSS so that true GPS-denied navigation is possible.
Figure 3. Schematic of the APNT configuration on board the JAGER UAV. Resulting location information is passed to the autopilot for navigation.
The UAT antenna receives multiple signals from visible ADS-B ground station transmitters. The transceiver combines these with a GPS timestamp, and the data is passed to the APNT computer for analysis. Based on knowledge of the absolute locations of the ADS-B antennas, the range of the vehicle from each antenna can be calculated, which in turn can be used to trilaterate the vehicle’s absolute position. This position is then passed to the autopilot for the UAV’s navigation, while the status of the equipment and signal strength are passed down to the ground for monitoring in real-time.
The necessity of using GPS signals as an accurate timing system is a current limitation, as navigation in GPS-denied conditions is clearly not possible while we are using GPS as a clock. As mentioned eariler, future designs will derive time from non-GNSS sources, such as chip-scale atomic clocks or the terrestrial ranging signals.
Carrying an onboard computer allows for real-time processing of the terrestrial alternative navigation signals. However, there are a few limitations to the use of these signals. First, the vertical position is difficult to calculate due to the geometry of terrestrial signals as well as the sparsity of visible station at low elevation. This is solved by using a baro-altimeter. Second, DME signals do not provide a pseudoranging function. Current work sponsored by the FAA is developing a DME pseudoranging capability. As the technology matures, we will improve the hardware and algorithm that can be integrated into future JAGER designs, resulting in lower weight and power overhead for the APNT payload.
Tracking Overview
GPS jammers do little more than emit signals in the GPS frequency range. Because the signals from GPS satellites are so weak by the time they reach the Earth, ground-based jammers do not have to be especially powerful to overwhelm GPS in their immediate vicinity. A jammer is no more than a ground-based radio-frequency source radiating within the GPS spectrum.
The JAGER system will autonomously locate the nearest beacon emitting electromagnetic signals at the target frequency: the GPS frequency in this scenario. Testing such a system is difficult due to the illegality of jamming the GPS signal within the United States. We instead test the system using a powerful Wi-Fi beacon as a proxy for the overpowering jammer. Excepting the target frequency, the procedure to locate the jammer is identical to the GPS case.
To receive the jamming signal, the front of the craft carries an antenna optimized to receive signals of the target wavelength; the current antenna has a 60° cone of maximum sensitivity. It is angled downward 30° from the horizontal, so that the craft can receive all signals from the horizon to 30° from vertical. This gives the UAV visibility over most of the space in front and underneath it. Like the other payload equipment on the vehicle, the antenna is secured with a fast-release mechanism so that it can be easily swapped out if necessary. For Wi-Fi tracking, we use a Yagi antenna with 60° beamwidth and 9 dBi gain. In upcoming trials, we will test different antenna configurations (such as dual antennas, small antenna arrays, and directional antennas augmented with omni-directional antennas) to determine benefits of these different layouts.
Signals from the antenna are passed into a module that converts the Wi-Fi data to serial, then from serial to USB. A single-board Linux computer with a quad-core processor then analyzes the signal data (see FIGURE 4). The hardware used to locate the jammer weighs 160 grams, so has negligible impact on the vehicle’s flight time or range.
Figure 4. Schematic of the tracking system on board the JAGER UAV. The resulting believed location of the target is passed to the autopilot.
To find the jammer’s location, the UAV performs a controlled yaw spin while recording the strength of the jamming signal. On the basis of the signal landscape surrounding the vehicle, the computer estimates the jammer’s location and sends a message to the autopilot instructing the craft to fly in that direction (or, more accurately, in a direction that optimally improves the ability of JAGER to find the jammer quickly). In return, the autopilot updates the tracking computer and ground station as to the vehicle’s position.
After moving a certain distance towards the jammer’s believed location, the craft repeats the spinning maneuver and starts the process again. Although rotating only the antenna might increase the speed of the operation, the energy required to carry the necessary antenna-rotation mechanisms for the duration of a flight is more than that needed to spin the entire craft.
The tracking algorithm is not as straightforward as gradient ascent or homing, and the vehicle will not always fly in the direction of greatest signal strength. The operational area is uneven, and may include buildings, towers, or airplanes, resulting in a complicated RF environment. Signals are scattered, diffracted and reflected, meaning that an algorithm that simply follows the strongest signal will not always converge on the actual jammer location.
To decide the optimal path from the vehicle’s present location to the jammer’s believed position, the tracking algorithm makes use of partially observable Markov decision processes (POMDPs). POMDPs model decision processes where the underlying state of the system (that is, the location of the jammer) is never completely known, and maintain a probability distribution over the set of all possible states.
The entire deployment area (an airport and its environs, for example) is split up into a square grid. For every possible combination of jammer and vehicle grid square locations, the signal strength and direction that would result is calculated offline prior to deployment and stored in a database on the tracking computer.
During the mission, the UAV records its own position and the sensed jamming signal’s strength and direction. The jammer location that would correspond to this result is retrieved from the database, as well as a measure of the strength of this belief state.
Once the craft has a belief as to the location of the jammer, it moves to a new location in the jammer’s believed direction before taking another measurement of signal strength. The new location and new measurement are combined, and the updated corresponding jammer location is retrieved from the database. This process is repeated until the vehicle believes itself to be right above the jammer, at which point a photograph is taken, the ground station is notified, and the hunting mission is complete.
Having found the jammer, the system can be programmed to execute a wide range of operations. These include reporting coordinates and a live image of the believed jammer location back to the ground station, hovering above and tracking the jammer if it begins to move, landing at the jammer site, or returning to base.
We calculate and store the POMDP decisions in advance of the flight. This strategy has some advantages. First, it allows for almost instantaneous decision-making. This is because the algorithm’s decisions are based solely on the vehicle’s current location and sensory observations and not on any previous states (a defining characteristic of a Markov decision process). The craft needs only to observe its current state in order to look up its next move in the database. This enables rapid tracking in flight.
A second advantage is that safety checks can be pre-programmed into the database in advance of deployment. While JAGER is programmed to move towards the grid square believed to contain the jammer, it can also be programmed to avoid or take special precautions when moving towards or in the vicinity of certain squares in the grid (also called geo-fencing). In an airport situation, for example, the vehicle would avoid moving into the square containing a control tower or ground-based antenna, or would fly at a minimum altitude over buildings and taxiways to avoid collisions.
Finally, the integration between the autopilot and the tracking software can provide other important safeguards: in the proof-of-concept system, any navigation decision taken by the software can be relayed to the ground for human verification before the UAV begins to move. This supervised mode of operation lends itself to a seamless migration path to fully autonomous operation (always overseen by a human operator).
However, one disadvantage of calculating and storing decisions in advance is the storage space needed on the vehicle. Because the result of every possible combination of vehicle and jammer locations within the grid is calculated, the size of the database grows quickly with increasing numbers of possible positions (and states). The larger the grid or the greater the required accuracy, the more space is needed to store the database. With current algorithms, the database needed to locate a jammer to within 30 meters in an area the size of an airport requires 15 gigabytes of storage space, resulting in longer lookup times during flight.
We are considering several strategies to mitigate this disadvantage, including better compression, more effective search algorithms, and uploading from a ground server only the parts of the database that correspond to the vehicle’s current operational area. Another strategy is to use an adaptive mesh that changes in resolution depending on the jammer’s belief state: at low certainty the database resolution is low, but increases in the appropriate area as the jammer’s location becomes more certain.
Another disadvantage of pre-solving the decision-making process is that the system must be reconfigured for every site in which it is deployed. The specifications of the tracking algorithm will change depending on the requirements of the operating area. The grid size, shape and absolute location must change to suit the area being protected. The resolution of the grid depends on the required accuracy of the tracking system, and restricted or prohibited locations must suit the terrain, buildings and geological features of the deployment space. For example, a lead JAGER vehicle could be adapted and tested to suit a particular airport, and then the bespoke algorithm and database uploaded to backup vehicles in that airport’s fleet.
APNT Performance
During the Joint Interagency Field Experimentation (JIFX) event at Camp Roberts, California, in November 2014, we tested the APNT system by deploying the vehicle with GPS, UAT and DME antennas simultaneously recording data. GPS receivers on the ground were used to collect reference measurements to estimate the time of transmission of the signals from the APNT sites. All signals were recorded at an altitude of 275 meters above ground level (600 meters above sea level), at four different points roughly 800 meters apart, and the data analyzed for comparison. As expected, the UAT broadcast was noisier than the GPS signal. However, it was possible to calculate a range from the UAT data that was accurate to within 16.6 meters of the GPS reference position, well within the 30 meters error bound specified in the project specification (see FIGURE 5).
Figure 5. UAT range deviates from GPS derived range-estimate by an average of only 16.6 meters throughout the duration of the test flight.
While UAV navigation using APNT was done offline in post-processing for these tests, with planned algorithm improvements and hardware acceleration the UAT signal can be used to get real-time position information nearly as accurate as that from GPS. Thus the JAGER UAV can be navigated with comparable reliability in both GPS and GPS-denied environments.
Terrestrial APNT signals will be received at a wide range of power levels. This effect is not observed with the GPS network, as the different satellite signals are broadcast from such a great distance that any differences in received signal strength are relatively small by the time they reach Earth. For terrestrial networks, signals from transmitters close to the receiver can be many times stronger than those further away, which can result in two issues: 1) interference where one signal overwhelms another, and 2) inability to process a signal if the receiver does not have adequate dynamic range to capture strong and weak signals clearly.
This problem was observed in our tests, as we were receiving two signals: one 13.7 kilometers (DME) and the other 43.5 kilometers (ADS-B UAT) from our test site. Calculating accurate ranging estimates from the two required determining a gain setting that had dynamic range adequate for receiving both signals clearly.
Vehicle Performance
During experimental testing, the vehicle itself also underwent rigorous assessment of its performance under different conditions. Due to the delicate and often expensive nature of the payloads and experiments made possible by the JAGER platform, it is essential that the vehicle perform as expected, and that there are multiple procedures in place to protect the payloads in case of vehicle failure.
Because the open-source autopilot had never been used with such a large vehicle, we first ground-tested the craft’s flight control and stability. The vehicle was tethered and constrained to move in only one axis, and ropes were used to control its roll. While altering autopilot variables controlling roll and pitch feedback loops, we measured the vehicle’s response to impulsive disturbances and the time taken for it to right itself when upset. In this way we could tune the control gains and verify that the vehicle would be exceptionally stable during flight in even the most challenging atmospheric conditions. While we preferred to fly in the early morning hours to exploit clear air and lower winds, we did perform tests with momentary gusts of up to 7 m/s during envelope expansion flights.
We tested the vehicle with two accelerometers on board to measure how the rotors’ vibrations affected the rest of the craft. One accelerometer was attached to the airframe itself, while the other was secured to the payload plate. A comparison of the acceleration data recorded by the two instruments revealed that the payload plate experienced significantly less vibration than the airframe during flight, and both measurements remained well within the tolerances advised by the airframe manufacturer.
Two crucial flight modes also were tested before payloads were flown on the vehicle. Both altitude-control mode and position-control mode were tested to ensure that they could precisely constrain respectively the vehicle’s altitude and absolute position in a range of atmospheric conditions. Results showed that in altitude control mode, the vehicle’s z-coordinate was held constant to within ± 0.5 meters. In position control mode, its x- and y-coordinates remained within ± 1.0 meters (or a single vehicle length).
The success of the JAGER tracking mission also depends on accurate position measurements from the UAV. Operators must be confident in the vehicle’s position, so that ground forces can easily apprehend the located jammer, and also so that there is confidence in the success of safety protocols including geo-fencing, no-fly zones and minimum flight altitudes.
In addition to the geo-fencing and flight precautions taken by the tracking algorithm, the JAGER UAV has several other safety procedures executed automatically by the autopilot. A non-catastrophic error in the flight systems or payload is transmitted to the ground station for human troubleshooting, and commands can be sent to the vehicle as to how to proceed.
Finally, should we continue operations and allow its batteries to get sufficiently low, the vehicle will automatically return to launch site for landing and battery replacement. A catastrophic failure such as the loss of a motor will result in an immediate controlled landing. The craft can also be commanded from the ground station to land or return to launch, and can be taken over by a human pilot at any time.
Other tests verified that the vehicle has the range and endurance to be successful when deployed in an airport setting. When fully loaded with APNT and tracking payloads, the UAV exhibited a top speed of 10 m/s, enough to cover the length of an A380-capable runway in less than 5 minutes. A 20-minute flight endurance means that even including hovering during jamming signal observations by the tracking antenna, the JAGER system can hunt easily and effectively throughout an airport-sized area. Furthermore, we continue to explore techniques to improve dash capability, including reducing the weight of the APNT payload, and we anticipate describing results of these efforts in future reports.
Electromagnetic Interference
Because of the payload tray’s small area (0.5 m2), electromagnetic interference (EMI) between APNT components was a significant issue during testing. The GPS and UAT receivers are extremely sensitive to interference from other sources emitting in the frequency ranges to which they are tuned. The APNT computer, by contrast, is composed of various processors, clocks, drives and power boards that emit powerful electromagnetic noise at a wide range of frequencies as a byproduct of their normal operation.
The size and mass of the APNT computer board meant that it had to be mounted in the center of the payload tray to avoid unbalancing the UAV. That left a maximum 7 centimeters of space around the computer on which to mount the two antennas (see FIGURE 6). With no shielding, the EMI from the computer proved powerful enough to completely overwhelm the GPS, UAT and DME network signals, making navigation and position estimation using any network impossible.
Figure 6. Diagram showing the APNT experimental payload, and the proximity of the EMI-radiating CPU to numerous antennas.
The EMI problem was solved in three ways. Masts were used to raise the receiving antennas to a height of 19 centimeters above the payload tray, the maximum height at which a mast collapse wouldn’t cause catastrophic rotor and vehicle failure.
The antennas also were moved around the edge of the payload tray so as to be furthest from the system components radiating at their particular frequency. Two devices that proved particularly problematic were the solid-state hard drive in the CPU and the telemetry radio antenna, which radiated EMI that interfered with the GPS and UAT frequencies respectively. This was solved by moving the telemetry antenna to the underside of the craft, and the GPS antenna to the far side of the payload plate from the hard drive. The flexible design of the payload plate described earlier ensured that the relocation and testing of components was a straightforward process.
Shielding, however, proved to be the most important factor in eliminating EMI. Custom-made copper shields were added to the two masts to shield the antennas from the computer below them while still allowing an unobstructed view of the sky (see PHOTO). We tested numerous shielding iterations, including wire meshes and aluminum and lead foils; however; all were ineffective due to the strength and wide range of EMI wavelengths emitted. Finally, the computer itself was covered in a 2-millimeter layer of copper and 1-millimeter steel sheet. This combination struck the best balance between effectiveness and weight: aluminum was light but proved ineffective at shielding, while lead was very effective at EMI shielding but was too heavy for the UAV to carry.
The APNT payload prior to installation of the DME antenna. The copper shielding on the CPU and antennas can be clearly seen.
Conclusions
The development of the JAGER system contributes to U.S. preparation for a GPS jamming attack on civil aviation. While the first iteration described here is a significant improvement on previous jammer-hunting systems, future iterations of the JAGER UAV will be able to successfully navigate in a GPS-denied environment using alternative navigation signals including UAT and DME, and broadcast an accurate estimate of their position down to the ground.
The use of an octocopter flight system gives speed, maneuverability and sensory perception that far exceed any ground-based tracking effort. A fully loaded top speed of 10 m/s and almost instantaneous direction changes allow for efficient hunting over an airport-sized area and the location of a GPS jammer to within 30 meters, within a 20-minute flight endurance.
As the JAGER system can be entirely assembled from commercially available or open-source components and operates entirely autonomously, the system provides a low-cost, readily obtainable solution to the problem of GPS jamming. This means that it can be deployed quickly and is operable without extensive prior training.
The integration of autopilot, APNT navigation and tracking systems also allows for comprehensive monitoring and control of the UAV from the ground. Telemetry and data links to the ground station provide real-time updates as to the craft’s position, the jammer’s believed location and the status of all systems and instruments running on the vehicle. Safety protocols implemented in the software ensure that there is no risk of collision with site buildings, vehicles or personnel.
JAGER’s modular design gives operators extensive flexibility in situations that are capable of being successfully resolved by the system. The switching of equipment and software to allow the UAV to use GPS navigation to hunt a UAT or DME jammer, for example, could be effected in a matter of seconds.
The JAGER system also provides a reliable test platform for any experiment that requires airborne operation. The exceptional stability of the airframe combined with extended flight time, high top speeds and pinpoint positioning lends the system to a wide variety of applications beyond jammer tracking, including network monitoring, atmospheric experiments and biological research.
Manufacturers
The JAGER UAV airframe is a S1000 octocopter by DJI Innovations, Shenzhen, China; the flight batteries are a 8000 mAh model by Hextronik, Dongguan, China; the autopilot hardware and GPS antenna is a Pixhawk by 3D Robotics, Inc., San Diego, California; the autopilot software is based on PX4 by Pixhawk.org. The JAGER navigation GPS is made by u-blox, and the receiver for the APNT clock is made by Trimble. The UAT hardware includes an ASR-2300 multichannel transceiver by Loctronix Corporation, Woodinville, Washington; the tracking hardware comprises a 2.4 GHz Yagi antenna from L-com, North Andover, Massachusetts; an RN-XV Wi-Fi module by Roving Networks, Chandler, Arizona; and an Odroid-U3 computer by Hardkernel Co., Gyeonggi, South Korea.
James Spicer is pursuing concurrent bachelor’s and master’s degrees in aeronautics and astronautics at Stanford University.
Adrien Perkins is a Ph.D. candidate in aeronautics and astronautics at the Stanford University GPS Laboratory. He received his undergraduate degree in mechanical aerospace engineering at Rutgers University.
Louis Dressel is a graduate student at Stanford University. He received his undergraduate degree in aerospace engineering from Georgia Tech, with a minor in computer science.
Mark James is a master’s student in aeronautics and astronautics at Stanford University.
Yu-Hsuan Chen is a research associate at the Stanford GPS Laboratory. He received his Ph.D. in electrical engineering from National Cheng Kung University, Taiwan.
Sherman Lo is a senior research engineer at the Stanford GPS Laboratory.
David S. De Lorenzo is a principal research engineer at Polaris Wireless and a consulting research associate to the Stanford GPS Laboratory.
Per Enge is a professor of aeronautics and astronautics at Stanford University, where he is the Vance D. and Arlene C. Coffman Professor in the School of Engineering. He directs the Stanford GPS Laboratory.
BeiDou Signals, Future Receiver Design Highlighted at Stanford PNT Symposium
By James D. Litton and Tom Langenstein
James L. Litton
The Stanford Center for Position, Navigation and Time conducted its eighth symposium on PNT in October 2014. These symposia have always been a superb two (this year three) days of excellent presentations, ranging over the entire domain of PNT, including policy factors as well as technical ones.
This year the first day featured student speakers, either from Stanford or the students of former Stanford students who are now faculty at other universities. The conference is by invitation only; sponsors include Lockheed Martin, Boeing, and other companies involved with GNSS. This essay highlights two presentations that struck us as harbingers of change in the industry: Greg Turetzky’s paper on ubiquitous location, and Minquan Lu’s and Zheng Yao’s paper on new signal structures for BeiDou.
Brad Parkinson gave a keynote address mixing challenges and opportunities from the frontiers of policy formation. David Last did not fail to amuse with his lighthearted and satirical commentary on navigation and society at dinner. Many others gave noteworthy presentations, and all of the presentation slides can be found online.
Tom Langenstein
Both papers that we selected for this article have very broad scope with considerable strategic significance in GNSS design and applications. It seems a little impertinent, as well as superficial, to try to convey their essence in fewer than 2,000 words, but the material presented is available elsewhere, too.
New Signal Structures for BeiDou
Professors Mingquan Lu and Zheng Yao of Tsinghua University laid out in clear and detailed fashion the motivations for BeiDou’s choosing to introduce new signals for the Phase III global system, analyses of alternative modulations, and the results of bench testing in service to the desired properties (interoperability, acquisition and tracking thresholds, receiver complexity, in-band interference, and so on).
They emphasized one non-technical or operational motivation: independent proprietary designs for patent protection. No declaration of policy intention was made; however, the direction was clear, even though the authors are university professors and not government officials.
Some of this work has been published elsewhere in IEEETransactions by the same authors and has a substantial history, reflecting the lessons learned from the predecessor system designs and very thorough analysis, simulation and bench testing. Space does not allow extensive citation, but the key drivers for the designs and the results are summarized below. The preferred modulations chosen or synthesized are quadrature multiplexed binary offset carrier (QMBOC) for B1C and asymmetric constant envelope-binary offset carrier (ACE-BOC).
The principal deficiencies cited of the earlier-proposed BeiDou Phase III signals (circa 2010-ICG) were given as:
no independent intellectual property rights; thus, a big patent risk
signal performance needs to be improved
more flexible receiving modes and more varied application scenarios should be considered.
The principal requirements for BeiDou Open Service signals were cited as:
independent intellectual property rights
better compatibility and interoperability with GPS and Galileo
smooth transition from Phase II to Phase III
improved performance
Separate requirements were stated for the B1C and B2 signals, as follows:
B1C: (QMBOC)
compatibility with other signals of the same carrier frequency
better interoperability with GPS L1 and Galileo E1 signals
better ranging accuracy (than GPS C/A and BeiDou Phase II B1(I))
receiving mode diversity for different receivers (low-end and high-end)
independent Intellectual property rights
B2C: (ACE-BOC)
multiplexed B2a and B2b into a constant envelope signal
better interoperability with the GPS L5 and GALILEO E5 signals
In the quoted case study tests, simulated ACE-BOC and AltBOC signals were generated at several fixed transmitting power levels and processed using software receivers. For each given transmit power level, the ACE-BOC was allotted three times power for the pilot channel over that of the data channel while the AltBOC allocated equal amount of power for both the pilot and the data channel, that is, 3:1 for ACE-BOC and 1:1 for AltBOC.
The resulting tracking performance of the ACE-BOC is more robust than that of the AltBOC.
Table 1, taken from the presentation, provides an overview of the signals.
Table 1. New signal structures proposed for BeiDou.
The compatibility properties of the new signals, if adopted, which seems quite likely, are desirable. The implicit intellectual property aspects of the development, both in motivation and in differential design of a signal structure which seems to be claimed as novel have a defensive basis, apparently, in earlier assertions of proprietary designs. It will be interesting to see whether similar international negotiations follow, or perhaps already have. The paper was well received and stimulated considerable hallway comment.
Ubiquitous Location
Turetzky’s paper laid out the phenomenal growth of location-based services and the implications of such growth for design requirements in GNSS-wireless at the user device level and at the silicon level. On growth (from various quoted sources):
The compound annual growth rate of GNSS devices will continue, from its current 22 percent level to a robust 9 percent for the years 2016-2022; heading for seven billion installed units by 2022.
The cumulative core revenue in the decade 2012-2022 will be 46 percent in LBS portable and wearable devices and 47+ percent in vehicles.
There will be many billions of installations of indoor location technologies by 2018, in virtually every venue imaginable.
Some of the design implications of the requirements driving the growth in indoor location are:
Always Located, or continuous location. For this case, the energy dissipated per day (16 hours) and signal availability (100 percent) are the featured specification and the secondary specification, respectively. These specifications, in turn, require hybrid constellations and minimal standby power consumption.
The scaling down to very small (14 nanometer) dimensions enables much faster switching speeds, search rates and lower power dissipation in active modes and more complex algorithms, but at the expense of leakage current, which adversely affects standby power, an increasingly important factor.
Thus, for GNSS design, the challenges are to:
Take advantage of benefits of smaller geometries to achieve higher clock speeds, more memory, lower active power and smaller size, while greatly reducing standby power from leakage;
Incorporate new methodologies at chip and system design level; Integrate multiple radios on a single die to reduce cost and size without creating interference to a very sensitive GNSS radio;
Integrate multiple radio sources into a single location solution;
Bring together a disparate value chain;
Turetzky outlined a vision for his employer, Intel, to be a leader in all aspects of these revolutionary developments. The technology roadmaps embrace most modalities of positioning: GNSS, Bluetooth, WI-Fi, cellular, and SBAS, and cross most platforms, including wearables. We think that another, unemphasized challenge is in the increasing density of these units with the current specifications on out-of-band-emissions and the spectrum sharing and spectrum management factors in the ubiquity of the devices.
From Greg Turetzky’s Ubiquitous Location paper, presented at Stanford PNT Symposium.
Tune in to our free webinar Receiver Design for the Future,with Greg Turetzky of Stanford speaking on Ubiquitous Location, scheduled for Jan. 15 (1 p.m. EST/ 10 a.m. PST/ 6 p.m. GMT). Register today!
Both papers represented the dynamism of our industry and its diversity of technologies and practitioners and the service to that industry provided by the remarkably consistent excellence of this symposium.
James D. Litton heads the Litton Consulting Group and previously played key executive roles at NavCom Technology and Magnavox.
Tom Langenstein is executive director of the Stanford Center for Position, Navigation, and Time, and deputy program manager of the Gravity Probe-B project.
New Technology, New Applications, New Science from the Stanford Symposium
Headshot: James D. Litton
By James D. Litton
The sixth annual Stanford PNT Symposium in November brought together a select group of experts to share insights from the latest research, developments, and proposals, GNSS and non-GNSS, that show promise for the international community. Among other noteworthy presentations, we heard Brad Parkinson’s suggested incremental system changes to significantly improve signal availability and accuracy, a comprehensive update on China’s Compass system, and the latest in spoofing and proposed proofs of location.
GNSS in General
The budget realities of U.S. GNSS development, and the need to maintain the systems at the high levels of performance upon which so many critical and commercially beneficial applications now depend, were analyzed by two men with industry-household names, Brad Parkinson and Gaylord Green.
Nibbles. Professor Parkinson gave a very sophisticated, nuanced presentation entitled “Nibbles,” in which he outlined feasible and productive technical steps to ensure the preservation of what he described as “the three As:” availability, affordability, and accuracy. Rather than do radical surgery on accuracy or availability in order to preserve affordability, he identified so-called nibbles at requirements, incremental improvements enabled by use of current technology advances, for example, vector (Spilker) receivers, power-conversion efficiency improvements, antenna gain and steering modifications, weight reduction for multiple launch capability, and use of sensor fusion for more robust receivers with greater jam resistance.
It was a high-level but quantitative system design approach aimed at improving affordability and interference resistance while maintaining and improving availability and accuracy. He made the salient point that affordability with a given level of performance is enhanced by availability, that is, maintaining 30+ satellites on orbit brings multiple benefits that improve affordability. The estimates of gain from the nibbles struck me as conservative, at least for those with which I had some quantitative feel.
Alternative Architectures. Col. Gaylord Green addressed the same subject with a different approach, in a presentation entitled “GPS Alternative Architectures.” His motivation for alternative architectures was to provide the needed PNT capability at an affordable cost. He pointed out that GPS satellites have increased in dry weight from 334 to 2,100 pounds, and that the cost of the IIA, IIF, and III satellites have gone from $100 million on orbit to $400 million on orbit. Colonel Green indicated that starting a new development with the same signals cost more than continuing with GPSIII. (The Congressional Budget Office has recommended consideration of using IIF satellites to maintain the constellation and bypassing GPS III.)
The reduced capability satellites are called NavSats. He suggested that a mixed constellation of NavSats (with minimal ancillary payloads and frequencies) such as 15 GPSIII and 15 NavSats would enable a constellation of 30 satellites; the minimum necessary to assure sky-challenged users of satisfactory coverage. He recommended that design of satellite power conversion to be set by start-of-life, not end-of-life goals. Colonel Green identified the signal priorities in terms of their functions (L-5, L-2, L1C, and four military signals requiring crypto). Like Parkinson, he identified technology changes in antennas and signal architecture to reduce costs, necessitating a demonstration program. He also indicated that advantage could be taken of other GNSS constellations for civil signal purposes, alleviating the demands on GPS satellites. Colonel Green identified satellite constellation arrangements which would be more cost effective (multiple launch) and provide adequate coverage. He pointed out that such a NavSat program would require a new start and would necessarily constrain GPS modernization funding. In short, such a “GPS Alternative Architecture approach” would combine continuation of GPS III as planned with the addition of simpler, lighter satellites with reduced diversity of signals to replace the aging GPS satellites now on orbit beyond their design life.
Compass. Professor Jingnan Liu of the GNSS Research Center of Wuhan University gave what most observers thought was the first comprehensive and data-intensive description of Precise Positioning results with the COMPASS (Beidou) system. He showed that the Beidou regional system, from which he presented copious data, can currently provide standard positioning service with <10M horizontal and <20M vertical accuracies at 95% confidence level. He also showed that results with Beidou plus GPS are 10-20% better than GPS alone. He provided results for surveying, for ground-based augmentation, for RTK, PPP, clock stability, orbital statistics, wide area differential and many other metrics of PNT. Professor Parkinson noted, in appreciating the presentation, that it was the first detailed release of so much technical data on COMPASS performance. The results noted above were obtained with 4GEO+5 IGSO+2MEO satellites. The constellation is expected to grow to 5GEO+5IGSO+4MEOs by the end of 2012 and to 5GEOs+3IGSOs+27 MEOs by 2020 for a global service. The amount of data and the diversity (application and instrumentation) of the data were truly impressive.
GPS Modernization. Dr. Keoki Jackson of Lockheed Martin presented a comprehensive review of GPS Modernization with charts which described the evolution of GPS from Block I to Block III. He depicted the program as on schedule for delivery of the first GPS III vehicle in May, 2014, with a 2015 launch. Most of this material was the same as reported from the AFCEA GC-12 program in GPS World earlier this year. A matrix comparing the attributes of GPS III with GPSII and beneficial outcomes from “Back-to-Basics Investments” were key takeaways.
Ground Control. Ray Kolibaba of Raytheon presented a detailed overview of the OCX program, the next generation Operational Control System. This presentation also emphasized improvements in program management, simplification of development practices, extensive use of commercial development methods and predicted on-time delivery with all of the attributes needed for both GPS III and the existing constellation.
Military User Equipment. Col. Bernie Gruber, Director of the GPS Directorate, gave an update on current activities with emphasis on progress in Military User Equipment (MGUE) development. This material was somewhat further advanced in schedule than the equivalent May 2012 time frame in which the same subject was presented in much detail at the AFCEA GC-12 meeting at the Directorate. The currently ‘hot’ topics of jamming and spoofing threats, countermeasures and affordability were prominent in the presentation. Some of the key achievements for 2012 listed were the release of BAAs (Broad Agency Announcements) for NavSat studies and the completion of a Congressional Report on ‘Cost Effective GPS). Launch of GPS IIF-3 and delivery of GPS IIF-4, 5,6 & 7 were also noted. Security Certification for MUE cards was a very noteworthy achievement, which will make future MGUE development and utilization much easier for the challenging jamming and spoofing environment which is expected. The themes of affordability and jamming and spoofing threats were dominant in this review, as well.
General PNT
Norvald Kjerstad is a professor of Nautical Science at Aalesund University College and a long-time professional navigator in academic, geophysical, and shipping communities. His paper vividly depicted the risks brought about by climate change, by increased commercial interest in shipping and mineral resource exploration in the Arctic region, and by the very limited navigation infrastructure and limited communications assets.
Arctic Navigation. Both DGPS and SBAS systems are quite limited in the arctic, magnetic compass systems are less accurateat the very high latitudes ( and their errors propagate into navigation radar, collision avoidance and other systems). Auroral effects limit the availability of GNSS at times (Glonass improves GPS because of the higher orbital inclinations) and hydrographic charts of the arctic are frequently quite wrong, due to changes in water depth and to limited surveying frequency. Increased tourism, shipping and resource interest intensify the consequences of the increased risk to seafarers.
The advent of Galileo and Compass, integrated with GPS-Glonass will greatly improve the reliability of GNSS signals. However, navigation through the ice, at places thin and navigable and at random places deep and massive (ice ridges) is much more than knowing where one is with respect to the center of the earth. Radar helps with detection and avoidance of ice ridges but the sinking and grounding of icebreakers and commercial vessels demonstrate that much better knowledge of the environment is needed to avoid future disasters. The thousand-kilometer shorter route over the Pole can be very expensive and not necessarily the fastest one. However the increased activity in the Arctic is going to continue, and it is mandatory that safety factors be given greater attention by the International Maritime Organization (satellite compasses are reliable where magnetic ones are not, but the IMO has not approved them) and by the hydrographic services of the affected areas.
From Farm to Front Office. Jim Geringer, former governor of Wyoming, now a director of ESRI and a member of the GPS Excom gave, as usual, a very entertaining presentation (“GPS/GNSS From the Farm to the Front Office”) with highly interesting examples of the very broad and deep impact of GNSS on society, including financial statistics and object lessons in the misuse or inaccurate use of geospatial data. Geringer was an engineer before he went into politics and that came through clearly in the presentations, even though he was very self-effacing concerning his technical credentials. He gave amusing examples, not all from Apple, of the effects of combining current and historical geospatial data, such as airport runways shown in topography layers obtained before leveling the airport areas, and a road running across the valley filled by Hoover Dam.
Geringer critiqued an attitude on the part of GNSS professionals in which their attention is more devoted to the how of obtaining the information than to the effects that future changes might have on the users. He discussed policy challenges presented by the FCC mandate to find 500MHz of spectrum for high speed wireless data, by affordability, by the potential for jamming and spoofing. It was good to be reminded of the awesome realized economic benefits of GNSS, the manifold applications which GNSS systems enable and the ease with which this potential can be limited or actually damaged by pursuit of other worthwhile objectives which are politically favored or which bring short term revenue into the treasury at the expense of GNSS system requirements in bandwidth. The less obvious but equally or more beneficial economic benefits of high accuracy GNSS and the impact of actual lives lost or resources untappedwere illustratedand quantified in Geringer’s broad presentation. One hopes that this presentation will be or has been seen at High GSA and policy levels in the FCC and NTIA.
Geringer’s presentation provides a nice segue into a presentation by:
LightSquared Lessons Learned. Rich Lee of Greenwood Telecommunications Consultants, LLC and iPosi. Entitled Lessons Learned from the GPS-LightSquared Proceeding, it was an assessment of the opportunities missed and damage done in the drive to enable the use of spectrum adjacent to GNSS frequencies for 4G LTE wholesale services through high power Auxiliary Terrestrial Components (ATCs) using MSS spectrum reallocated (or repurposed) to the purpose under a conditional waiver by the Chairman of the FCC, Julius Genachowski, on a recommendation by the International Bureau of the FCC. According to Lee, Greenwood was called in to solve, “if solutions exist” the problem of the ‘spectrum collision’ between the LSQ design and GPS, after the collision occurred. He likened the role of Greenwood to that of a tow truck operator called in to clear up a collision after the impacts. Lee served on the TWG (Temporary Working Group) as head of the cellular subgroup and headed the NTIA/Excom cellular tests. The presentation was very good, technically, in both its detailed and more strategic aspects but both the history described and the lessons learned (see below) were, understandably, from the perspective of a party which was unable, in this particular instance, to achieve the goals desired by their sponsors. This failure was for reasons of basic spectrum policy conflicts between GNSS applications and those mooted to become transcendent- mobile high speed data for consumer and industrial applications.
Lee depicted the lack of a requirement in history for regulation of receiver standards, as opposed to transmitter standards, to the inability to anticipate the crowded spectrum (for example, his statement that spectrum was regarded as “free” and minimizing interference was the key objective, a burden placed on the transmitters). Now that spectrum is seen as scarce and underutilized in many U.S. government applications and inadequately conserved in many civil applications, the concept of receiver standards for avoiding interference and the use of advanced filterand antenna technology in receivers as well as in transmitterswould enable easier, less confrontational and more lucrative use of this 21st century El Dorado.
Parenthetically, Pierre de Vries (University of Colorado, and a member of the FCC’s Technical Advisory Committee) and others recently testified to a House of Representatives panel, recommending that harm claim thresholds be established with which to manage the trade-offs between intrinsic receiver protection requirements and transmitter power distribution, so that instead of just adding the specification requirement to receivers, a flexible system approach be adopted. They noted that it was very difficult to anticipate the receiver design needs for all applications. The failure to understand the requirements of precision GNSS receivers and the simplistic concept of fences was a large driver in the collision between LightSquared and GNSS.
Lee’s lessons learned summary is:
Upper 10: candidate for ground augmentation? The upper 10 MHz (1545-1555 MHz) of spectrum was originally allocated to LightSquared through its acquisition of TerraSat. During the 2012 conflict months, LightSquared publicly abandoned operating in the Upper 10.
Question: sound alternatives for this band? (Including as a good GNSS guard band)
Consider: sub-microwatt uses for short range augmentation, such as Department of Transportation Intelligent Transport Systems (ITS)-TWG findings. Given very low effective isotropically radiated power (EIRP), ample compatibility with precision GPS nearby.
Precision GPS: –82 dBm worst case Upper 10 susceptibility (–1 dB C/NO)
1 uW EIRP transmitter is about 13 dB below at 1 meter
Seems suitable for high availability in urban areas; provides urban in-fill, redundancy such as ITS
At 100-mETER range: Signals ~-135 dBm incident power at an ITS receiver antenna
Band continues as a space-to-earth downlink, shared with geostationary Earth orbit-mobile satellite services, including carriage of GPS/GNSS corrections (OmniSTAR, StarFire)
Lee contested the FCC chairman’s assertion that the LightSquared-GPS matter was an anomaly, saying instead that it was “foreseeable.”
However, foreseeable anomalies such as singularities exist in predictions of scientists. I believe that this anomaly was clearly foreseeable, but a hedge-fund mentality, financial engineering, and a long-held attitude toward GPS in the FCC were the drivers of these benighted decisions.
The gold rush is still on for finding underutilized spectrum. Some systems, including GNSS, utilize bandwidth that needs protection for purposes other than the usual communications requirements. It is vital to honor the homesteads of GNSS and protect the noise floors. Receiver standards must be considered very carefully because communications receivers and high precision GNSS receivers are very different systems.
Scientific Subjects
Some presentations grouped under this topic are available in ION publications from GNSS 2012.
Atom Interferometry. Mark Kasevich of Stanford presented his paper on precision navigation sensors based upon atom interferometry. While application of these sensors in general awaits many highly difficult engineering advancements, the outcome would be a great boon to navigation, were the outcome comparable to the evolution of chip-scale atomic clocks.
Andrei Shkel reprised his paper entitled “Precision Navigation, Timing, and Targeting enabled by Microtechnology: Are we there yet?”
Gravity. Tom Murphy of the University of California, San Diego, gave a fascinating paper of fundamental importance to understanding gravity by laser ranging to retroreflectors left on the moon by various Apollo and Russian missions. A highly contrived initialism for the project is APOLLO, for Apache Point Laser Observatory Lunar Laser-Ranging Operation. The work is a product of a seven-university/research center consortium.
The system of APOLLO for measuring the range of the moon relative to the earth at Apache Point is a marvel of experimental ingenuity and advanced instrumentation in collecting the few photons that get back from the laser shots at the moon. Laser light is caught by the retroreflectors and returned to the telescope at Apache Point. A very sensitive gravimeter system at the observatory enables compensation for the Earth’s crustal motions, and orbital deviations are compensated. Precisions of a few millimeters in range to these devices on the moon are achieved, almost good enough to be useful in testing the “Strong” Equivalence Principle of General Relativity.
From an engineering point of view, the timing, motion compensation, detection sensitivity (a few photons per shot), and several other features of the system are truly impressive, and the potential for improving our understanding of general relativity, so-called dark matter or energy, and more, are exciting aspects of this work. To have much better precision through placing laser transceivers on the moon to increase the number of reflected/transponder photons in the samples would appear to be quite valuable and relatively simple NASA missions for future work, even though the data may eventually be sufficient to enable theoretical advancements without such added signal-to-noise benefit. This paper was an example of excellent engineering in the service of important science.
Vulnerabilities and Limitations
Charles Schue of UrsaNav gave a very detailed and comprehensive paper on wide-area timing, navigation, and data using low-frequency technology. He provided data for timing, location, and data transmission over distances greater than 125 nautical Mmiles.
eLoran. He made the point and showed examples to demonstrate that the technology for these systems exists today, is highly affordable, and can represent a major strengthening of the nation’s critical infrastructure. The systems and hardware he presented are very attractive and seemingly very mature.
Schue was preaching to the choir, as far as I can tell; there is, in the PNT community, no controversy about the need for eLoran. Further, there is a sense of disappointment and wonder that so little money was saved at the expense of great risk to our critical PNT infrastructure, particularly in view of the vulnerability to jamming and spoofing of GPS and the other GNSS systems for civil use; a vulnerability analysis which informed the balance (two) of the papers in this summary report.
Spoofing. Dennis Akos presented data on spoofing tests conducted at Lulea, Sweden, near a low-density commercial airport with limited road traffic and a restricted Swedish Air Force weapons test area, and in Kaohsiung, Taiwan, near a very busy airport with dense roadway traffic. The incidence of radio-frequency interference (RFI) in the latter case was great and in the former case negligible, until the team introduced their jamming and spoofing equipment.In both cases, a simple automatic gain control (AGC) monitoring design, which was computationally efficient, was able to detect and measure the RFI from the jammer-spoofer.
Using all commercial off-the-shelf (COTS) hardware, the jammer was identified and located with time-of-arrival and power-difference-of-arrival. The researchers showed that using a controlled reception pattern antenna (CRPA) like the Stanford four-element CRPA and all-COTS equipment, jammers could be indentified and located efficiently through AGC processing. A large amount of detailed data were presented with screen shots and plots of the effects of the jamming on the receivers.
Proof of Location. Logan Scott of LS Consulting gave a paper on proof of location. He projected the need for location proof in several applications, ranging from system control and data acquisition intrusions that would affect industrial control systems to bogus Mayday calls, the response to which is very expensive, and he provided many examples of data security applications. He also provided several schemes, ranging from cryptographic GPS RF signal structures to the use of overlapping systems, like Galileo and GPS, to enable verification of location.
Scott identified the massive security threat represented by millions of smart phone and tablet users who can store millions of bytes of information, such as maps of sensitive locations. An authorized user of such a map, GNSS-enabled, on a tablet or smart phone, should be able to access the restricted information if the user is in the right location. However, a user, authorized or not, outside of the restricted area would find that area of the map blank if he tries to access it externally, a kind of location need-to-know control.
Scott anticipates the use of temporary keys for weapons usage; such keys would require that the user be in a location authorized for such use. He provides block diagram descriptions of systems that would be feasible to achieve these location proofs for high-value and dangerous operations. These block-diagram level descriptions are accompanied by quantitative assessments of the difficulties and benefits of such system modifications.
It was a compelling tour de force on the subject. We do not have time or space to cover it well but the material has gradually been built up from earlier available publications by Scott at ION conferences and in GNSS journals and magazines. Both the need for such systems and the means by which they may be practically achieved are well worth studying by those responsible for policy and programmatic decisions, and by technologists seeking new product ideas and applications.
And More
A few interesting presentations do not fit into the above categories. Stan Honey, founder of the company Sportvision (the creator of the first-down yellow-line overlay in televised American football, and many other broadcast enhancements for sporting events) and considered sailing’s master navigator, gave a wonderful dinner talk about the PNT technology being utilized in the America’s Cup TV graphics, umpiring, and race management. Honey reflected upon how competitive sailing, unlike other professional sports, has fully adopted the use of advanced PNT technology in how the sport is umpired and managed.
Jason Wither of Microsoft presented a paper on spatialized data for mixed reality, which was very informative in how various types and layers of data are combined to create mixed-reality systems.
Ron Fugelseth of Oxygen productions showed his very entertaining video entitled “A Toy Train in Space.” The video was posted on YouTube a few months ago and immediately went viral. It is a fine example of the use of GPS technology.
James D. Litton heads the Litton Consulting Group and previously played key executive roles at NavCom Technology and Magnavox.
Polaris Wireless, a provider of software-based wireless location solutions, announced that Per K. Enge of Stanford University has joined its executive team as the chief technical advisor. In an interview with GPS World, Enge describes how combined wireless location signatures and GPS show an exciting way forward for location in dense urban environments, where the wireless solution actually improves as GPS degrades.
Polaris Wireless, a provider of software-based wireless location solutions, based in Mountain View, California, announced that Per K. Enge has joined its executive team as the chief technical advisor to the company’s CEO, Manlio Allegra.
Enge is a professor of aeronautics and astronautics at Stanford University, where he directs the GPS Research Laboratory. He is also is co-author of the textbook Global Positioning System: Signals, Measurements, and Performance and has received the Kepler, Thurlow, and Burka Awards from the Institute of Navigation (ION) for his work. He received his Ph.D. from the University of Illinois in 1983, where he designed a direct-sequence multiple-access communication system that provided an orthogonal signal set to each user.
Polaris Wireless’s core product is a Wireless Location Signature (WLS) for wireless network operators to identify the location of a wireless device to within 50 meters, at low cost, even in urban and indoor environments. Polaris WLS is designed to scale as an operator’s network grows, providing location capabilities in 2G (GSM/CDMA), 3G (UMTS/CDMA 2000), and emerging 4G (LTE) air interfaces, as well as indoor technologies such as W-iFi, DAS, and Femtocells. Founded in 2003, Polaris also counts among its customers law enforcement/government agencies and location-based application companies.
In an interview with GPS World, Enge described how the Polaris location solution is actually enhanced by buildings, in direct opposition to the way GPS operates, and how he sees integration of the two technologies as leading the way forward for location-based services.
“A cell phone general receives signals from 3 to 10 base stations, and is required to report the signal to noise ratio of those, even beyond base station used. We backhaul that information into the Polaris server, where we do multilateration based on signal strength measurements. Imagery shows how RF signal stregnth varies in the city. Polaris uses the base station signals (similar to how Skyhook using Wifi access points), but the cell infrastructure use is better because it is always there and used by every phone, while Wifi receiver is not on all phones yet, just smartphones.
“Marriage to GPS is very cool, because the Polaris technology loves buildings, they introduce the variation, the grain in the signal-strength map. It’s jagged, it’s got nooks and crannies, which are well-predicted by our propagation models. So those buildings enhance our technology.
“We’ve got it pretty widely deployed, on 24 E911 networks, 24 wireless carriers that we have commercial relationships with in the United States, from quite big to more boutique providers. Some are smaller, regional, other larger, like Verizon though not the total network.
Michael Doherty, Polaris Wireless product marketing and communications director, added that “We also work outside the United States for location surveillance for governments who are also looking to deploy for commercial services. The solution is software-based, in the control plane of the handset, it is already within the handset, using network measurement reports (NMRs). Emergency caller location for cell phones, E911, is just the first of applications to come, it’s where we cut our teeth.”
Polaris Wireless has been a research partner and sponsor at the Stanford GPS Research Laboratory that Enge directs. “Now I’ve stepped up my relationship with them, to start talking about getting the next level of accuracy. They joined about 4 or 5 years ago, and funded the work of David De Lorenzo , a Ph.D. student who did first big set of measurements that we did on indoor navigation, on GPS penetration into buildings. On campus. We’re aviation people, so this was a new area, good for us, we expanded into that area and got a lot smarter about how to navigate indoors.”
De Lorenzo’s 2009 Institute of Navigation International Technical Meeting paper, “Design and Performance of a Minimum-Variance Hybrid Location Algorithm Utilizing GPS and Cellular Received Signal Strength for Positioning in Dense Urban Environments,” can be accessed here.
“In New York, three-quarters of cell calls get 50-meter accuracy,” stated Doherty. “99 percent get 150-meter. Polaris solutions will improve that by a factor of 2. That’s a forward-looking statement.”
“We are entering a significant growth period for the company. From 2007–08 we saw our business start to take off, from core E911, take off in demand from overseas governments, for anti-crime, anti-terrorism. From 2007 to 2010, Polaris Wireless had an average 66 per increase per year in bookings, in contracts signed. That’s a healthy indicator of future revenues
“Year over year 2010 to 2011, we saw a quadrupling of bookings, and a revenue increase of 30 percent, as we started to see those deployments taking place, and revenues coming in as a result. we expect that trajectory to continue through 2012 and 2013. Again, forward-looking statements.”
“During the deep recession, when U.S. governments were cutting back, we went overseas and were able to ride that wave.”
As to particulars on directions that Polaris research and development might take under his advisement, Enge volunteered “One of the really big initiatives is the inclusion of map-matching, knowing that we’re probably on a street, especially if our velocity is appreciable, going beyond a snapshot solution fix, taking advantage of knowing where streets our. We have cached that as a particle-filter problem, a Kalman filter associated with a set of hypotheses. When you have a sequence of snapshots, the particle filter is a very powerful way of putting that together.
“How do we know if we’re in a building? By looking at the NMRs. Now, how high are we in that builidng, so that’s aided by the database.
“The big core enterprise of Polaris, stripping away PNT, the strength is the underlying [cellular network] database. Polaris is where the database meets navigation. To make E911, law enformcement, navigation, all better.
“One application I’m particularly keen on is for campuses.The risk for muggings is greatest when walking to a car in a distant parking lot. We’re thinking about how we can help that student when assaulted. You can’t pull out your phone and call E911 nor run to a blue tower [emergency phone]. But you might have your keys in your hand, so if we make it so you can just push a button on it, the NMR goes to an emergency center on campus, then we can be more helpful in helping that student.”
Doherty inserted, “The beauty of our technology is that no one has to do anything. Our technology is capable of locating any device connected to the cellular network, as long as the device is powered on. It’s a software deployment, nothing to go out and deploy equipment cell tower by cell tower. Nor can bad guys disable anything in the phone to void this service. Polaris’s solution resides in the network, not in the handset. The confluence of signals in the network drives the solution. There is no chip in the handset that can be disabled or turned off. Whether GPS is enabled or not.”
In a final comment on concerns for the future, Enge said, “Personal privacy devices, PPDs, the GPS jammers. I’m pretty worried about that. Unlike the Polaris technology, GPS technology can be slapped on someone’s car without an organization making sure the rule of law is preserved. We’re hoping to make the PW technology complementary to GPS, so that when GPS is jammed, the PW solution will still provide a location.
Doherty added, “It is complementary today. Cellular networks covers a large area. Take for example, downtown San Francisco: The wireless signature solution is absolutely the best to locate there. In wide-open country, GPS has an advantage. That complementarity is happening today.
“Having Per onboard, we’re going to make that complementarity work better and better.”




 “All modern generation cell phones use virtually all GNSS signals. This includes GPS, Galileo, GLONASS and BeiDou. In addition, they receive the correction signals, such as WAAS and EGNOS. This capability is embedded in the chips that are currently used. We are told that they have the capability to track on the order of 50 satellites at once. We expect that dual frequency is close to realization and the use of the new civil L5 signal will make cell phones even more capable.”
“All modern generation cell phones use virtually all GNSS signals. This includes GPS, Galileo, GLONASS and BeiDou. In addition, they receive the correction signals, such as WAAS and EGNOS. This capability is embedded in the chips that are currently used. We are told that they have the capability to track on the order of 50 satellites at once. We expect that dual frequency is close to realization and the use of the new civil L5 signal will make cell phones even more capable.”






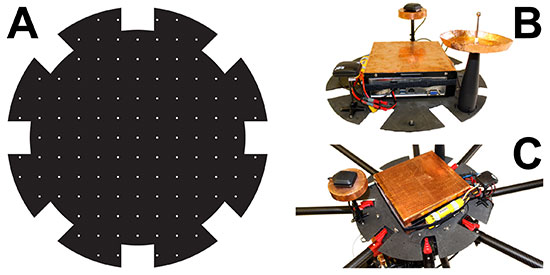
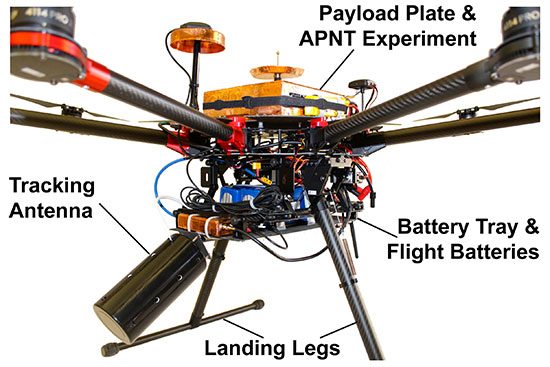
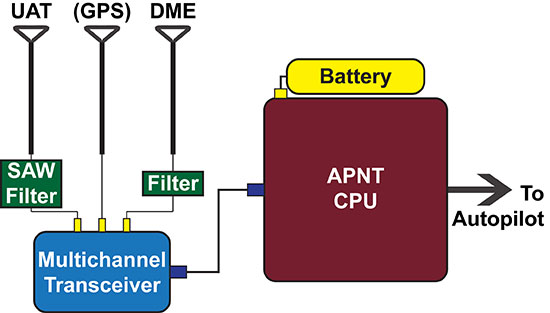
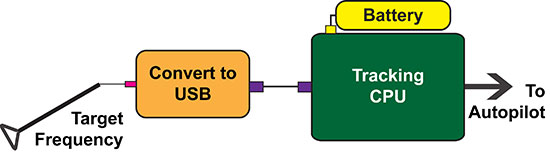
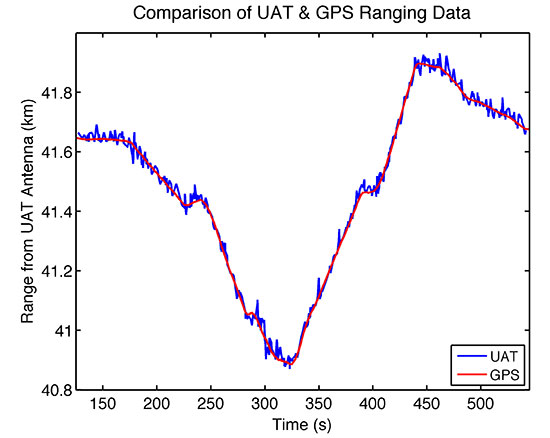
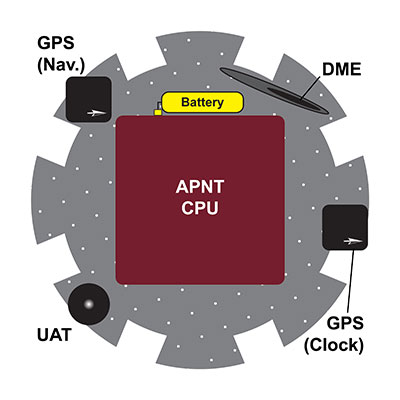
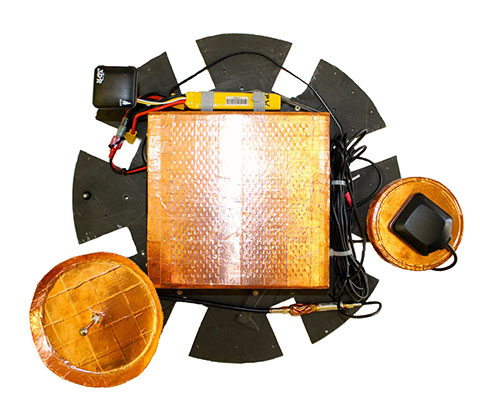



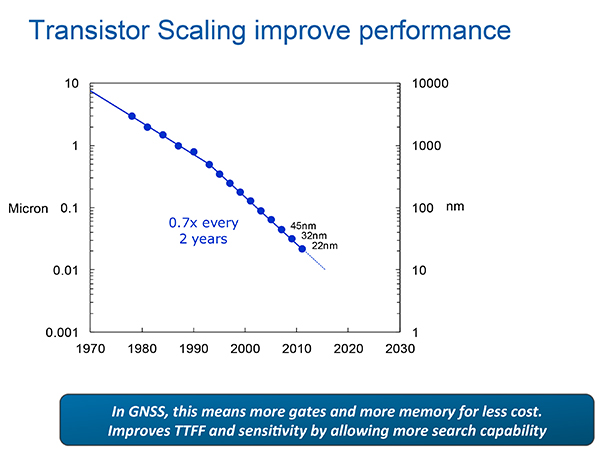
 Polaris Wireless, a provider of software-based wireless location solutions, based in Mountain View, California, announced that Per K. Enge has joined its executive team as the chief technical advisor to the company’s CEO, Manlio Allegra.
Polaris Wireless, a provider of software-based wireless location solutions, based in Mountain View, California, announced that Per K. Enge has joined its executive team as the chief technical advisor to the company’s CEO, Manlio Allegra.