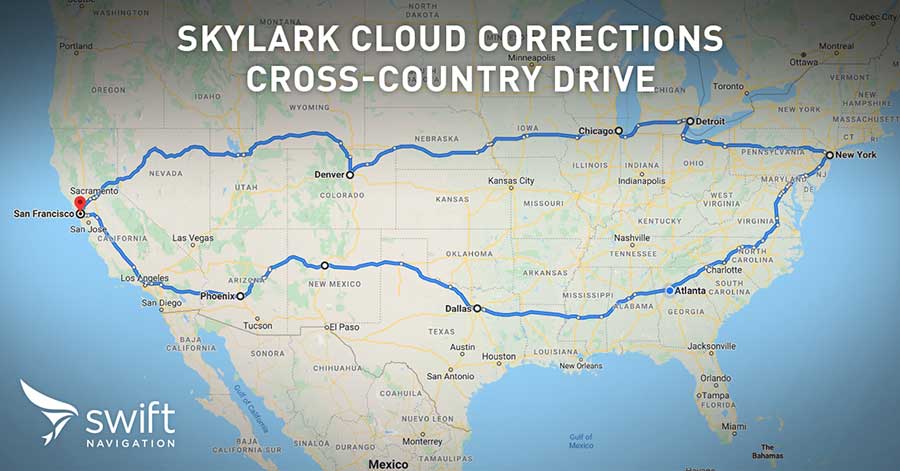
Swift’s first-of-its-kind, cross-continental drive demonstrates the performance of Skylark.
Swift Navigation, a San Francisco-based tech firm redefining GNSS and precise positioning technology for autonomous vehicles, has completed a cross-country drive test.
The goal of this first-of-its-kind drive, from San Francisco to New York and back, was to measure the efficacy of Swift’s recently expanded Skylark cloud corrections service and to demonstrate true nationwide lane-level GNSS correction coverage at the accuracy, reliability and availability levels required by Swift customers.
The drive took the Swift team across 26 states and Washington, D.C., with 6,614.7 miles (10,645.4 km) driven over 116 hours and 14 minutes logged. A Swift vehicle was equipped with 20 different GNSS devices, tested using six unique chipsets that included: Swift’s Piksi Multi, Duro and multiple leading GNSS silicon providers.
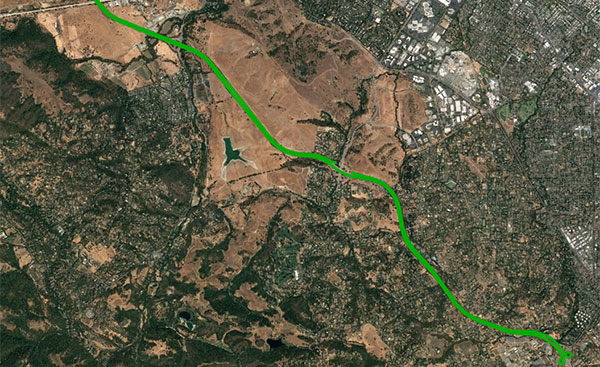
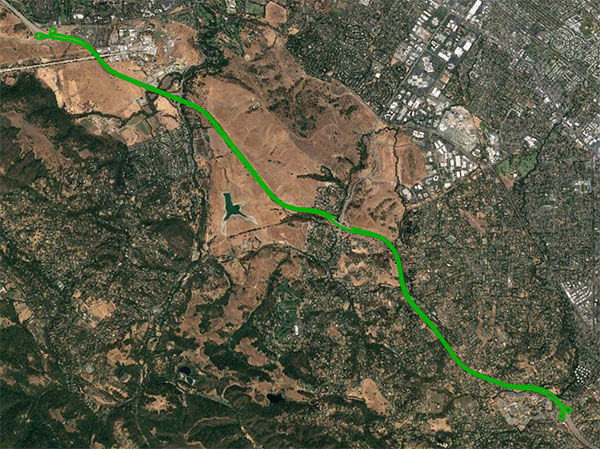
The results of the drive confirmed that Swift’s precise positioning solution — composed of Skylark and the Starling positioning engine — delivers consistent lane-level accuracy at continental level. Skylark delivered 100% availability, with sub-decimeter accuracy, over the entire United States, wherever cellular coverage was available.
Performance highlights from the drive:
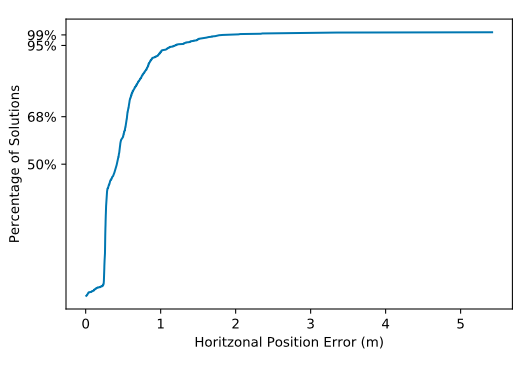
- +Sub-meter horizontal accuracy (2-sigma) achieved across all environments
- 100% Skylark availability
- Highly repeatable results with Starling + Skylark across variety of dual-frequency GNSS chipsets
“This is the longest continuous GNSS-based precise positioning drive test of its kind and we are proud of the engineering team at Swift for undertaking this ambitious task,” said Anthony Cole, executive vice president of engineering. “The results show that Skylark performs as intended and expected in both open sky and urban environments and demonstrate that Skylark is truly a cross-continental corrections network delivering the high integrity and high availability required by automotive OEMs, last-mile applications, rail, mobile and micro-mobility companies.”
In addition to full contiguous U.S. (CONUS) coverage, the Skylark corrections service is now available in Europe and is being built out to support autonomous applications across the globe.
Download a complete write-up of the cross-country drive test at www.swiftnav.com.