“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Songs for the Cows
Photo: SWNS Media Group
Farmers are controlling cows with a GNSS-based tracking system that plays “Waltzing Matilda” when they get too close to a virtual fence. Blue Carbon Farming in Somerset, England, has begun working with the Wildlife and Wetlands Trust (WWT) to allow cattle to graze in wetlands and salt marshes for the first time in 30 years. Farmers can now use the Nofence app and collars to track where the cows are and warn them away from danger with music. If a cow gets near the virtual fence, a boundary determined by the farmers, its collar will play the tune to warn it away from the area.
Robotic Dogs on a Mission
Photo: BMW
BMW is using a four-legged robotic dog to gather data for a digital twin at its Hams Hall engine production plant in the United Kingdom. The robot – a Boston Dynamics Spot model, which BMW has renamed Spotto – also will act as a watchdog and assist in other tasks at the site’s facilities. The autonomous robot is equipped with visual, thermal and acoustic sensors. The Hams Hall digital twin operates on three levels. On the first level, the twin generates 3D representations of the plant. The mobile robot feeds data into the second level – a data layer that also receives information from the site’s production facilities and IT systems. On the third level – the application level – programs sort the collected data, which personnel use for quality assurance and production planning purposes.
Keep Your Hands on the Wheel
Photo: Tesla
The U.S. Department of Justice has launched an investigation into Tesla’s Autopilot and Full Self-Driving (FSD) systems. Tesla is under the microscope of U.S. federal prosecutors, as well as the U.S. National Highway Traffic Safety Administration (NHTSA), who want Tesla to share more information related to its autopilot system after crashes continued occurring despite a December recall of more than 2 million vehicles. The investigation focuses on Tesla’s Autopilot system and the more advanced Full Self-Driving package, which the company has been selling as an optional add-on. Neither system can fully automate the driving process without human supervision, a point of contention that has raised questions about the accuracy of Tesla’s promotional materials.
Mass Coral Bleaching
Photo: Rainer von Brandis / iStock / Getty Images Plus / Getty Images
The Australian Institute of Marine Science (AIMS), in collaboration with the Great Barrier Reef Marine Park Authority, has observed extensive coral bleaching caused by elevated sea temperatures during aerial and in-water surveys of the reef. This information confirms that a mass coral bleaching event is taking place on the Great Barrier Reef, which is the fifth such event since 2016. The aerial surveys have so far covered almost two-thirds of the Great Barrier Reef Marine Park.
California lawmakers have passed a bill prohibiting OEMs of autonomous vehicles from marketing their vehicles as ‘fully self-driving.’ This law went into effect Jan. 1.
This legislation was passed in mid-September of 2022 and states that manufacturers are prohibited from selling new passenger vehicles with autonomous driving features without fully disclosing their capabilities and limitations. Companies such as Tesla, and other OEMs in California, will no longer be able to market vehicles as ‘fully autonomous,’ as the new bill states that it is “considered a misleading advertisement.”
Any violation of the new legislation will be punished as an infraction. Based on this, it is unclear what the exact punishment will be for OEMs that violate this policy.
Senate Bill No. 1398 will be added to Section 24011.5 of California’s vehicle code. The full bill can be found here.
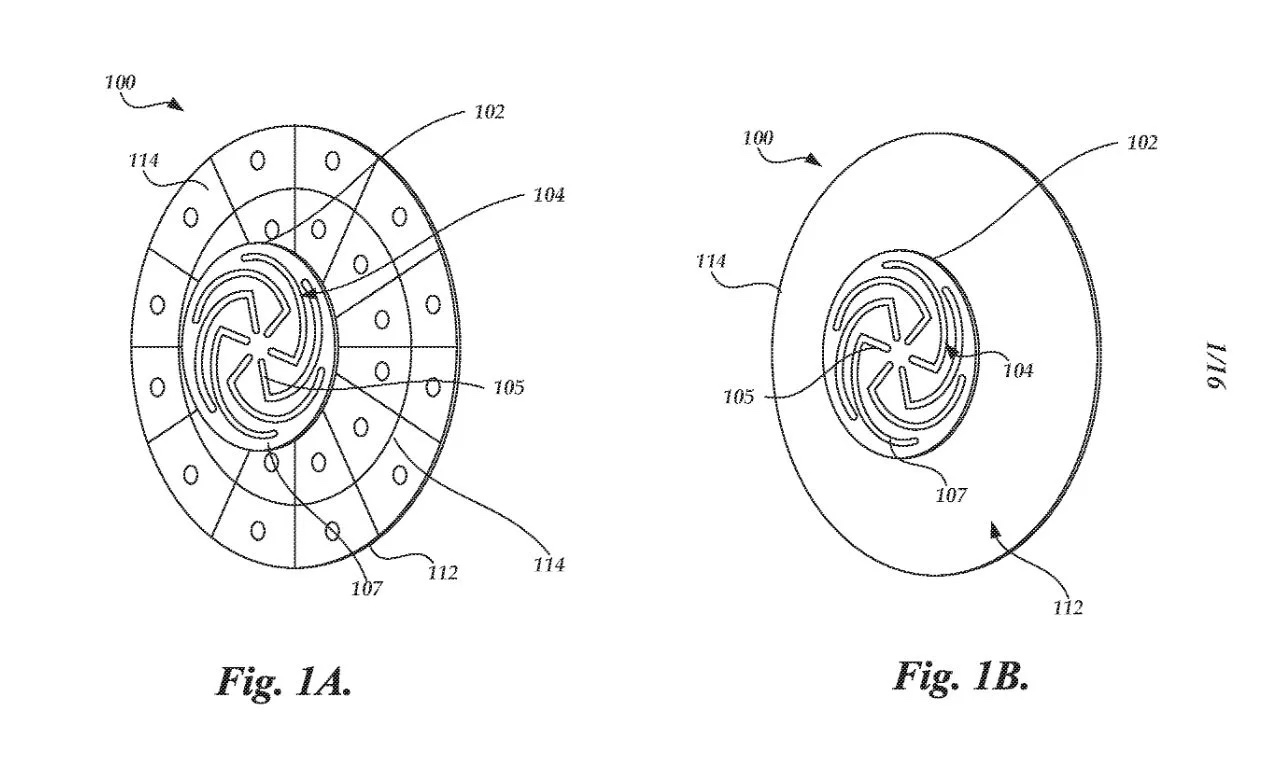
Tesla has applied to patent a new multi-band GNSS antenna with increased precision for self-driving and navigation in its autos, reports electrek. The antenna would be positioned inside the rear-mirror enclosure, and the system would also provide a heating element.
While increasing precision, it is also designed to reduce power demand, noise and cost.
The automaker describes the new device in the abstract of the new patent application:
A multi-band antenna system is provided. The antenna system can be placed under and embedded within a glass exterior surface of a vehicle. Such an antenna system can include a capacitively coupled metallic element on or adjacent to the glass exterior surface, which can serve as both a parasitic element to enhance gain and as a heating element to melt snow and/or ice accumulation over the glass area that covers the antenna. In certain applications, the antenna’s structure itself can be used as a heater to improve performance in adverse weather conditions while the heating elements are positioned away from the thermally sensitive electronics. The antenna system with integrated heating can include a spiral antenna.
A diagram of the antenna provided with the patent application. (U.S. Patent Office)
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Photo: Tesla
TESLA’S TUSSLES
Tesla has offered “full self-driving” on its cars since 2016, but most owners have never come close to experiencing a self-driving Tesla, with owners telling CNN Business that they’ve lost confidence in CEO Elon Musk’s predictions. Incidents of Teslas involved in accidents while on autopilot haven’t helped. In California in September, authorities arrested a woman for a DUI while her Tesla drove on autopilot, while in August, another Tesla on autopilot hit a parked police car in Florida. Unsurprisingly, the autopilot feature has increasingly come under scrutiny by U.S. regulators and lawmakers. Meanwhile, Musk announced a “Tesla Bot” humanoid robot prototype is coming in 2022.
Study author Lingqiu Jin tests the robotic cane. (Photo: Cang Ye, VCU/NIH)
MANEUVERING INDOORS
A robotic cane is being developed to help the visually impaired navigate indoors. The cane is equipped with a color 3D camera, an inertial measurement sensor and an on-board computer. When paired with a building’s architectural drawing, the device can accurately guide a user to a desired location with sensory and auditory cues, while helping the user avoid obstacles such as boxes, furniture and overhangs. Its development is funded by the National Institutes of Health and other agencies. Details of the design were published in the IEEE/CAA Journal of Automatica Sinica, under lead author Cang Ye (pictured), Virginia Commonwealth University.
Photo: Monterey Bay Aquarium
MAKING TRACKS WITH SEA OTTERS
Space Shop, a 3D print shop at NASA’s Ames Research Center in California, is printing a better tracker for wildlife. The prototype is being tested on sea otters at Monterey Bay Aquarium with the help of USGS. The GPS-enabled tracker is lighter and more accurate than current trackers; it costs less and is solar powered. It withstands a salt-water environment, and the occasional chomping from a sea otter’s strong teeth.
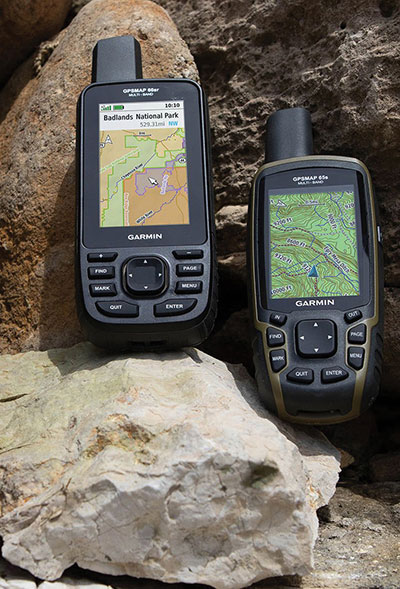
Photo: Garmin
NIGHT VISION? NO PROBLEM
Garmin has provided India’s defense forces with two handhelds equipped to receive the country’s NavIC signals. Both multi-GNSS handhelds also are equipped with altimeters, barometers and three-axis electronic compasses. The GPSMAP 66sr model has specialized military features, including compatibility with night-vision goggles so troops don’t have to remove their goggles to use it. The Indian Space Research Organization (ISRO) has asked Garmin to integrate NavIC into all of its upcoming satellite navigation devices.
In June 2019, Regulus Cyber’s experts successfully spoofed the GPS-based navigation system of a Tesla Model 3 vehicle. This experiment provided an important warning for all companies using GNSS location and timing: these technologies, on which they depend, are highly vulnerable to spoofing attacks. In the two years since the experiment, companies and governments have continued to research the potential harm that can be caused by spoofing attacks and are learning more about how to defend themselves from them.
The Tesla experiment was groundbreaking because it was the first time that a level 2.5 autonomous vehicle was exposed to a sophisticated GPS spoofing attack and its behavior recorded.
We chose Tesla’s Model 3 because it had the most sophisticated advanced driver assistance system (ADAS) at the time, called Navigate on Autopilot (abbreviated NOA or Autopilot), which uses GPS to make several driving decisions. However, this experiment exposed several cybersecurity issues potentially affecting all vehicles relying on GPS as part of their sensor fusion for autonomous decision making.
NOA makes lane changes and takes interchange exits once a destination is determined, without requiring any confirmation by the driver. Its several other features include autonomous deceleration and acceleration according to the speed limit, autonomous lane changing, and adaptive cruise control.
These features use a variety of sensors, including cameras, radar, speedometers and more. The researchers wanted to test the extent to which the Model 3 relied on its GNSS receiver to make these driving decisions and how it behaved when receiving contradicting information from its GNSS receiver and its other sensors.
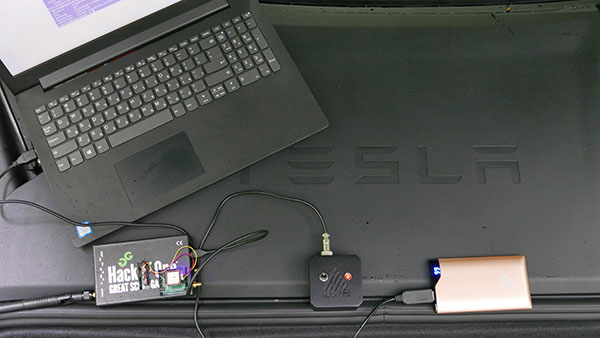
The researchers used hardware and software purchased online to mimic the tools potential hackers would use. The experiment involved two software-defined radio (SDR) devices purchased online, one to spoof GPS and one to jam all other constellations, connected to an external antenna to simulate an external attack. The software used to simulate the GPS signal was downloaded from an online source, available for free.
The test included three scenarios the researchers assumed would involve usage of GNSS, each one using a different spoofing pattern:
Scenario 1. Exiting the highway at the wrong location
Scenario 2. Enforcing an incorrect speed limit
Scenario 3. Turning into incoming traffic
A Tesla Model 3 was remotely hacked in a test of a GPS spoofing attack. (Photo: Regulus Cyber)
Scenario 1: Exiting the Highway at the Wrong Location
The car was driving normally at a constant speed of 95 KPH with NOA enabled. The destination determined for this ride was a town nearby and the car designated a certain interchange as the destination for an autonomous exit maneuver. The experiment began 2.5 km before the vehicle reached that interchange; however, the researchers’ fake GPS signal resulted in coordinates of a location on the same highway but only 150 m before the exit.
As soon as its GNSS receiver was spoofed, the car assumed that it had reached the correct exit and began to maneuver to the right, activating the blinker, slowing down, turning the wheel, and crossing a dotted white line to its right side, exiting to an emergency pit-stop, confusing it with the exit 2.5 km ahead.
To be clear, this would not have happened at any location along the highway, because sensor fusion with the radar and the camera enables the car to avoid physical obstacles and ensures that it does not cross a solid white line that makes a turn illegal.
The spoofing attack succeeded, in that it enabled the attacker to remotely manipulate the car’s sensor fusion and make it exit the highway at the wrong location.
Scenario 2: Enforcing an Incorrect Speed Limit
The car was driving to a random city far away on a highway, at a constant speed of 90 KPH, which was 10 KPH below the highway’s speed limit, with NOA enabled. The researchers generated a fake GPS signal, with the coordinates of a nearby town road that has a speed limit of 33 KPH. Shortly thereafter, the vehicle assumed the speed limit had just changed to 33 KPH and instantly began decelerating. Each time the driver attempted to accelerate using the gas pedal, as soon as he lifted his foot off the pedal the car engaged in heavy braking to quickly decelerate back to 33 KPH.
To be clear, this would not have happened if NOA had been turned off. The cruise mode can be disabled by either using the touch screen or by pressing the brakes, which would allow the driver to regain full manual control over the vehicle’s speed.
Again, the spoofing attack succeeded, in that it allowed the attacker to remotely manipulate the car’s speed and made it enforce a speed limit much lower than the actual one on the highway.
Scenario 3: Turning into Incoming Traffic
The car was being driven manually on a two-lane road with one lane in each direction, the type of road on which NOA cannot be used. The researchers generated a fake GPS signal, with coordinates of a nearby three-lane highway, with all lanes in the same direction. Furthermore, the spoofed location was 150 m from a designated exit that the vehicle’s navigation system was programmed to take, requiring a left turn.
Shortly after the car’s GNSS receiver was spoofed, the vehicle assumed it was on a highway and engaged NOA. Next, it triggered the exit maneuver, which began with activating the left blinker, followed by turning the wheel to the left. The driver had to quickly grab the wheel and manually drive the car back to its lane to avoid a collision with oncoming traffic.
To be clear, this kind of scenario would not be possible without the driver enabling the NOA. Once a Tesla driver enables NOA, it automatically turns on once the vehicle is on the highway with a set destination. This is why the researchers assumed that NOA would be turned on by default, and as long as NOA is activated, the vehicle is susceptible to the attacks mentioned in the experiment.
Once again, the spoofing attack was successful in that it enabled the attacker to remotely steer the vehicle into the opposing lane, placing it on a direct collision course with oncoming traffic. Out of the three scenarios described, this one proved that GNSS spoofing can endanger lives.
The hardware used for the GPS spoofing test. (Photo: Regulus Cyber)
GPS Cybersecurity for Automotive Applications
The NOA system in the Tesla Model 3, being an ADAS, allows drivers to rely on the car and its sensors for basic driving functions. Therefore, it enables drivers to briefly take their hands off the wheel and reduces the number of actions they are required to take. Nevertheless, drivers are still required to be fully attentive to the road so that they can take control of the vehicle at any time.
However, since this spoofing attack had such a sudden and instant impact on the car’s driving behavior, a driver who is not fully attentive and aware would not be prepared to quickly take control and prevent an accident. By the time the driver notices that something is wrong and reacts, it might be too late to prevent an accident. Already drivers have been found sleeping at the wheel, driving under the influence of alcohol, and doing other inappropriate tasks with NOA engaged.
Furthermore, this situation assumes a level 2.5 autonomous vehicle as was tested. But what happens in level 3 vehicles, in which driver engagement is limited, or level 4 and 5, in which driver response is non-existent? This research provides us with a glimpse into the crucial importance of sensor cybersecurity and particularly of GNSS cybersecurity.
The Tesla hack experiment and its results were eye-opening for the autonomous vehicles sector – the danger is real and rising as more and more vehicles are depending on GNSS technology as part of their sensors for assisted or automated driving. Up to 97% of new vehicles since 2019 incorporate GNSS receivers and most if not all are still vulnerable to the same spoofing attacks presented in this research.
In January 2021, the UN’s World Forum for Harmonization of Vehicle Regulations (WP.29) issued Regulation No. 155, which sets guidelines for cybersecurity in the automotive industry with the goal of addressing every possible cyber threat that it might encounter. Annex 5 of the regulation defines cyber attacks and states that in order to get approvals in the future vehicle manufacturers will need to provide solid evidence that their vehicles are sufficiently protected against them.
Among the cyber threats mentioned in the Annex is spoofing of data received by the vehicle — both sybil spoofing attacks and spoofing of messages. The Annex also lists the appropriate protection that vehicle manufacturers should implement and states that vehicle manufacturers will be required to provide evidence of the effectiveness of the mitigation measures they choose. These upcoming regulatory requirements can make the difference between life and death in situations caused by GNSS spoofing and ensure that only reliable and resilient positioning is used within vehicles, both today and in the future.
Please note: Tesla released a statement saying that it is “taking steps to introduce safeguards in the future which we believe will make our products more secure against these kinds of attacks.” Regulus Cyber researchers did not perform any further experiments with Tesla Model 3 since this research was published two years ago.
See the Tesla GPS spoofing experiment from the driver’s point of view:
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
Photo: i viewfinder/Shutterstock.com
It’s their land, too
Animal tracking is helping biologists see how many animals rely on wildlife crossings over or under highways. In the United States, specially designed crossings protect pronghorn antelope (Wyoming), panthers (Florida), mule deer (Nevada), moose (Utah) and grizzly and black bears (Montana), while crossings in Asia benefit rhinos, tigers and elephants. With crossings, mortality drop as much as 90%, says The Washington Post. In New Mexico, state agencies and tribes are tagging animals with GPS collars to identify roads that hinder migration. Meanwhile, engineers in Southern California are designing the world’s largest animal crossing, an $87 million overpass that will span a 10-lane Los Angeles freeway for the region’s mountain lions.
Tesla, come to me
Photo: Tesla
The new Tesla Smart Summon feature in Autopilot v10 autonomously drives the car to meet its owner, such as in a parking lot. Smart Summon has been used more than 550,000 times, Tesla CEO Elon Musk said on Twitter. But it has a few glitches: Owner tests have resulted in fender-benders, near crashes, ignored stop signs and a police run-in. And don’t test it with another Tesla nearby — the cars get confused.
Help, I’m shark bait!
Photo: European GNSS Agency
The Galileo Search and Rescue (SAR) service was demonstrated Sept. 26 off the coast of Belgium. In Operation Shark Bait, a volunteer “victim” — Australian broadcaster Tara Foster — operated her Galileo-enabled SAR beacon from a life raft off the port of Ostend. The service quickly triggered, with the rescue initiated in under four minutes.
Wheelchair navigation
A new app launched in Portsmouth, England, helps people with limited mobility plan their travel routes. The Route4U pavement navigation app benefits both wheelchair and pram (stroller) users, allowing them to discover safer, more accessible routes across the city. The app indicates pavement obstacles, surface quality, curb heights and widths, inclines and travel distances.
Autopilot Navigation Steers Car off Road, Research from Regulus Cyber Shows
The Tesla Model S and Model 3 — electric cars built for speed and safety — are vulnerable to cyberattacks aimed at their navigation systems, according to recent research from Regulus Cyber.
During a test drive using Tesla’s Navigate on Autopilot feature, a staged attack caused the car to suddenly slow down and unexpectedly veer off the main road. Regulus Cyber, the first company to deal with smart-sensor security across a wide range of applications including automotive, mobile, and critical infrastructure, initially discovered the Tesla vulnerability during its ongoing study of the threat that easily accessible spoofing technology poses to GNSS receivers.
The Regulus Cyber researchers found that spoofing attacks on the Tesla GNSS receiver could easily be carried out wirelessly and remotely, exploiting security vulnerabilities in mission-critical telematics, sensor fusion, and navigation capabilities.
Regulus Cyber experts traveled to Europe last week to test-drive the Tesla Model 3 using Navigate on Autopilot. An active guidance feature for its Enhanced Autopilot platform, it’s meant to make following the route to a destination easier, which includes suggesting and making lane changes and taking interchange exits, all with driver supervision.
While it initially required drivers to confirm lane changes using the turn signals before the car moved into an adjacent lane, current versions of Navigate on Autopilot allow drivers to waive the confirmation requirement if they choose, meaning the car can activate the turn signal and start turning on its own. Tesla emphasizes that “in both of these scenarios until truly driverless cars are validated and approved by regulators, drivers are responsible for and must remain ready to take manual control of their car at all times.”
Designed to reveal how the semi-autonomous Model S and Model 3 would react to a spoofing attack, the Regulus Cyber test began with the car driving normally and the autopilot navigation feature activated, maintaining a constant speed and position in the middle of the lane.
Although the car was three miles away from the planned exit when the spoofing attack began, the car reacted as if the exit was just 500 feet away — abruptly slowing down, activating the right turn signal, and making a sharp turn off the main road. The driver immediately took manual control but couldn’t stop the car from leaving the road.
The testing revealed another unexpected finding that significantly amplified the threat—a link between the car’s navigation and air suspension systems. This resulted in the height of the car changing unexpectedly while moving because the suspension system “thought” it was driving through various locations during the test, either on smooth roadways, when the car was lowered for greater aerodynamics, or “off-road” streets, which would activate the car elevating its undercarriage to avoid any obstacles on the road.
Yoav Zangvil, Regulus Cyber CTO and co-founder, explains that GNSS spoofing is a growing threat to ADAS and autonomous vehicles. “Until now, awareness of cybersecurity issues with GNSS and sensors has been limited in the automotive industry. But as dependency on GNSS is on the rise, there’s a real need to bridge the gap between its tremendous inherent benefits and its potential hazards. It’s crucial today for the automotive industry to adopt a proactive approach towards cybersecurity.”
The Regulus Cyber testing is designed to assess the impact of spoofing with low-cost, open source hardware and software, the same kind of technology that is accessible to anyone via e-commerce websites and open source projects on GitHub. Taking control of Tesla’s GPS with off-the-shelf tools took less than one minute.
The researchers were able to remotely affect various aspects of the driving experience, including navigation, mapping, power calculations, and the suspension system. Under attack, the GNSS system displayed incorrect positions on the maps, making it impossible to plot an accurate route to the destination.
Tesla’s response on Model S
Prior to the Model 3 road test, Regulus Cyber provided its Model S research results to the Tesla Vulnerability Reporting Team, which responded with the following points at that time:
Any product or service that uses the public GPS broadcast system can be affected by GPS spoofing, which is why this kind of attack is considered a federal crime. Even though this research doesn’t demonstrate any Tesla-specific vulnerabilities, that hasn’t stopped us from taking steps to introduce safeguards in the future which we believe will make our products more secure against these kinds of attacks.
The effect of GPS spoofing on Tesla cars is minimal and does not pose a safety risk, given that it would at most slightly raise or lower the vehicle’s air suspension system, which is not unsafe to do during regular driving or potentially route a driver to an incorrect location during manual driving.
While these researchers did not test the effects of GPS spoofing when Autopilot or Navigate on Autopilot was in use, we know that drivers using those features must still be responsible for the car at all times and can easily override Autopilot and Navigate on Autopilot at any time by using the steering wheel or brakes, and should always be prepared to do so.
“This is a distressing answer by a car manufacturer that is the self-proclaimed leader in the autonomous vehicle race,” Zangvil commented. “As drivers and safety/security experts, we’re not comforted by vague hints towards future safeguards and statements that dismiss the threats of GPS attacks.”
He offers the following counterpoints in response:
Attacks against any GPS system are indeed considered a crime because their effects are dangerous, as we’ve shown, yet the same devices we used to simulate the attacks are legally accessible to any person, online via e-commerce sites.
Taking steps to “introduce safeguards for the future” indicates that spoofing is, in fact, a major issue for Tesla, which relies heavily on GNSS.
In the case of cars, a spoofing attack is confusing in the best case, and a threat to safety in more severe scenarios.
The more GPS data is leveraged in automated driver assistance systems, the stronger and more unpredictable the effects of spoofing becomes.
The fact that spoofing causes unforeseen results like unintentional acceleration and deceleration, as we’ve shown, clearly demonstrates that GNSS spoofing raises a safety issue that must be addressed.
In addition, the spoofing attack made the car engage in a physical maneuver off the road, providing a dire glimpse into the troubled future of autonomous cars that would have to rely on unsecure GNSS for navigation and decision-making.
Given that the trust of the public still has to be earned as the automotive industry moves towards autonomy, the leading players are accountable for a responsible deployment of new technology.
As Tesla clearly stated, drivers are responsible for overriding autopilot under a spoofing attack, so it appears its auto pilot system can’t be trusted to function safely under a spoofing attack.
Because every GNSS/GPS broadcast system can be affected by GNSS/GPS spoofing, the issue is everyone’s problem and shouldn’t be ignored; furthermore, governments and regulators that have a mandate to protect the public’s safety must engage in proactive measures to ensure only safe GNSS receivers are used in cars.
“According to Tesla, they’ll soon be releasing completely autonomous cars utilizing GNSS, which means that, in theory, an attacker could remotely control the car’s route planning and navigation,” Zangvil said. “We’re obligated to ask what steps they’re taking to address this threat, and whether new safeguards will be implemented in its next generation of entirely autonomous cars.”
Although Regulus Cyber researchers tested only the Model S and Model 3, they concluded that the “disturbing vulnerability” of Tesla’s GNSS system is most likely company-wide, as the same chipsets are used across the Tesla fleet.
“Just a few months ago we saw that during a spoofing incident in a car show in Geneva, seven different car manufacturers complained that their cars were being spoofed. This incident proves that many other automotive companies that are working on the next generation of autonomous cars are also vulnerable to these attacks. As an industry, to win public trust and succeed, every car manufacturer should be proactive and prepare against these threats,” Zangvil said.
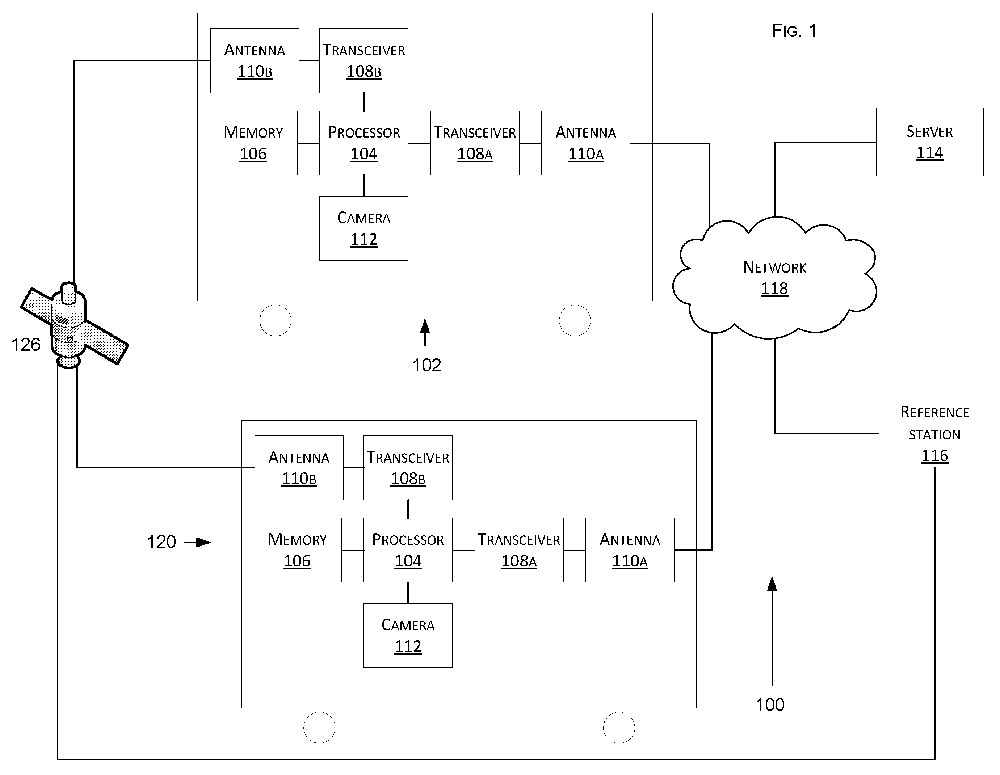
Tesla has developed a technology aimed at providing more accurate positioning for autonomous cars by sharing data between vehicles, according to a U.S. patent application.
The patent, “Technologies for vehicle positioning,” was filed in 2017 and made public in December 2018.
Solutions include cameras detecting matching locations and using other vehicles in its fleet as “cooperative reference stations” to share raw GNSS data and make positioning corrections.
Tesla describes in the patent, “The inventions increase such positioning accuracy via determining and applying offsets (corrections) in various ways, or via sharing of raw positioning data between a plurality of devices, where at least one knows its location sufficiently accurately, for use in differential algorithms.”
Techniques include:
a reference station sharing a positional offset with an automobile,
a reference station calculating and sharing a set of parameters (offsets and corrections) for various error components including atmospheric, orbital and clock,
a reference station sharing its raw GNSS data so that vehicles can remove errors through differencing or other calculations.
Tesla also would correct GPS data by matching camera data with vision maps to detect the exact location of a vehicle. With this vision-map matching localization approach, “a location estimate is varied until the location estimate makes a camera-reported lane boundary coincide with a map-reported lane boundaries,” the patent reads.
Schematic of Tesla’s system shows two vehicles (102, 120) feeding data to a network, a server and a reference station. (Image: Tesla)
In a unique car accident, a self-driving Tesla Model S hit and destroyed an autonomous Promobot, the robot model v4, on Jan. 6 in Las Vegas. The incident took place at 3000 Paradise Road, Las Vegas.
At 7 p.m., the Promobot’s engineers transported robots to the Vegas’s Congress Hall to prepare their booth at the Consumer Electronics Show, being held Jan. 8-11. All the robots were moving in a line. But one of them missed its way and drove to the roadway of the street parking lot.
At that moment, it was hit by a self driving Tesla car.
This video is property of Kevin Jenkinson, via Promobot.
After the clash, the robot was pushed aside and fell. The car continued to move and stopped 50 meters away from the accident. The passenger who was in the car while driving explains that he decided to try the self-driving mode (Full Self-Driving Capability) and chose an idle area for this test.
“There was nobody there, no men, no cars. I switched this Tesla into a self-driving mode and it started to move. And wow! A robot on the track! I thought the flivver would come round, but it bumped straightly into it! I am so sorry; the robot looks cute. And my sincere apologies to the engineers,” said George Caldera, a Tesla passenger.
As a result, the robot suffered serious damage. Parts of the body, the mechanisms of the arms, the movement platform and a head are destroyed. Now the robot is not able to take part in the exhibition and most likely there is no way to restore it.
This video is property of Steven Smith, via Promobot.
“Of course we are vexed. We brought this robot here from Philadelphia to participate at CES,” said Oleg Kivokurtsev, Promobot’s Development Director. “Now it neither cannot participate in the event not to be recovered. We will conduct an internal investigation and find out why the robot went to the roadway.”
The Tesla S reportedly uses the u-blox NEO-M8L GNSS chip. The company also in December 2018 received a patent for more accurate GNSS positioning using other vehicles as reference stations to share raw GNSS data and make positioning corrections.
Promobot is a manufacturer of autonomous service robots for business with development centers in Europe and Asia. Several hundred of Promobot robots operate in 26 countries around the world. They work as consultants, concierges, guides and administrators. At CES, Promobots will meet attendees at the Promobot booth, where it will give dance performances every hour.
The robot victim’s relatives have been notified. (Screenshot from video by Kevin Jenkinson)
“As of today [Nov. 28] Tesla owners have driven 1 billion miles with Autopilot engaged,” the company announced via tweet.
The Autopilot feature became available in 2015 and now comes on all new Tesla models with a $5,000 activation fee at the time of purchase or $7,000 if selected later.
The company is training its “neural networks” to improve its self-driving system.
Photo: Tesla
Tesla’s global fleet totals more than half a million vehicles, and recently marked a 20-billion mile step of total electric miles driven, the company said.
The Autopilot system can also function in the background of the vehicle, without being activated and with no input on control. Thus it gathers data from many more billions of “drivered” miles about its environment and potential Autopilot behavior.
The company previously mentioned the 1 billion-mile autonomous mark as the minimum it would need to move Autosteer from beta to a regular feature.
Updates to Autopilot are planned for 2019, including new hardware that will aid in the rollout of the company’s Full Self-Driving system, possibly by the end of that year.
In October 2014, Tesla started equipping its Model S with hardware to allow for the incremental introduction of self-driving technology: a forward radar, a forward-looking camera, 12 long-range ultrasonic sensors positioned to sense 16 feet around the car in every direction at all speeds, and a high-precision digitally controlled electric assist braking system.
Version 7.0 of Tesla’s software has now been released with Autopilot, which allows those tools to deliver a range of new features designed to work in conjunction with the automated driving capabilities already offered in Model S.
Tesla calls Autopilot a major step toward autonomous driving. “Tesla Autopilot relieves drivers of the most tedious and potentially dangerous aspects of road travel,” according to a Tesla blog. “While truly driverless cars are still a few years away, Tesla Autopilot functions like the systems that airplane pilots use when conditions are clear. The driver is still responsible for, and ultimately in control of, the car. What’s more, you always have intuitive access to the information your car is using to inform its actions.”
The combined suite of features represents an integrated autopilot system involving four different feedback modules: camera, radar, ultrasonics and GPS. “These mutually reinforcing systems offer real-time data feedback from the Tesla fleet, ensuring that the system is continually learning and improving upon itself,” the Tesla blog said.
Autopilot allows Model S to steer within a lane, change lanes with the tap of a turn signal, and manage speed by using active, traffic-aware cruise control. Digital control of motors, brakes and steering helps avoid collisions from the front and sides, as well as prevent the car from wandering off the road. “Your car can also scan for a parking space, alert you when one is available, and parallel park on command,” Tesla said.
Release of version 7.0 also features a significant visual refresh of the digital display. The instrument panel is focused on the driver and includes more functional apps to help monitor the ride.
Tesla founder Elon Musk said during a press conference that drivers should exercise caution in the initial months of the rollout, and consider Version 7.0 a beta release. “We’re advising drivers to keep their hands on the wheel at this early stage,” Musk said. The car’s dash alerts drivers when they need to take the wheel.
Just days after the launch, videos began appearing on the Internet showing near misses and other errors.
Differential GNSS+INS for Land Vehicle Autonomous Navigation Qualification
By Gilles Boime, Emmanuel Sicsik-Paré and John Fischer
Land-vehicle autonomous navigation requires centimeter-level qualification tools to enable confidence build-up for delivery to open-road traffic insertion. External positioning sensors over a dedicated road section can be replaced with an embedded high-accuracy, highly responsive epoch-by-epoch differential GNSS receiver coupled with an inertial navigation system. The demonstrated absolute accuracy and mobility extends the potential test area and minimizes cost for multi-environment validation.
Cover courtesy of Mercedes.
Personal cars and commercial trucks are continuously improving the driver experience and safety thanks to integration of more significant and machine-assisted control systems. Advanced driver-assistance systems (ADAS) are now integrated in all luxury cars and moving into mainstream products. Technologies covered by ADAS are specific for each car integrator, but increasingly they include now involving more safety features, such as driver assistance and partial delegation to autonomous control for small maneuvers such as lane control. The generation of ADAS systems introduced in early 2015 on high-end models are engaging more intelligence from the control system such as:
Lane departure warning system
Speed assistance and control
Driver assistance and control
Autonomous emergency braking.
It is not only individual drivers who want this technology, but also governments that are getting involved to prevent accidents and minimize the economic impact associated with them. In the European Union, the general safety regulation 2009/661 was the first step to engage member-states to act as a regulator to mandate car safety improvements. The European Transport Safety Council, a non-profit private association, released in March 2015 a position paper titled “Revision of the General Safety Regulation 2009/661.” It promotes the introduction of lifesaving technologies like intelligent speed assistance, autonomous emergency technology including all speed and pedestrian detection, and lane-departure warning systems as the next step of regulation.
Car manufacturers are not far behind. They understand their customers’ expectation of minimized risk and enhanced driving experience. Telematics is also a path to convert a single vehicle into a fully intelligent, connected and entertainment object with an associated high value. So every car manufacturer is willing to be seen as a technology master.
Toyota, for example, plans to integrate collision-prevention technology in all its mainstream and luxury cars by 2017. The ADAS new generation focuses on radar-activated cruise control technology for the collision-prevention system. The control system maintains distance from a vehicle ahead and can stop the car if driver doesn’t react. The next step is to monitor driver attention with sensors like cameras focusing on the driver’s eyes, and the pressure of the hand on the steering wheel.
However, no fully driverless car is expected in the next 10 years. This technology is limited by legal issues and the lack of reliable nationwide mapping data.
Since the technology must be fully proven to prevent any lethal threat on the user and other drivers, most car and truck companies are working actively on qualifying driverless technology today. Nissan began testing driver-assist technology on open-road traffic in Japan in late 2013. It enables highly advanced systems such as lane-keeping, automatic lane change, automatic exit, automatic overtaking of slower or stopped vehicles, automatic deceleration during congestion on freeways, and automatic stopping at red lights. This is a step towards attaining fully automatic driving, targeted for 2020 by Nissan.
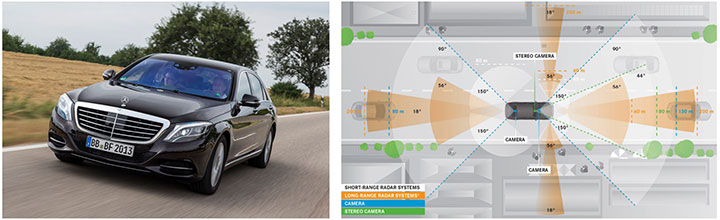
Some European manufacturers such as Daimler Benz are also early adopters. Daimler/Mercedes uses the Bertha Benz prototype car to test autonomous driving technologies. It merged multiple vision, radar and GPS sensor with digital map to monitor an open-road 100-kilometer trip in August 2013 (Figure 1).
Figure 1. Bertha Benz test car, left, running fully autonomous 103-kilometer trip in open road including 27 percent narrow urban roads. Right, networked sensor systems of the S 500 Intelligent Drive research vehicle.
All manufacturers are building driverless capability into their technology demonstration concept cars:
Mercedes with F 015 Luxury presented at the Consumer Electronic Show, early 2015;
Audi with Prologue, an extrapolation of test car RS7 concept equipped with SuperFast driverless pilot;
BMW’s electric i3 car is integrating ActiveAssist technology that enables portions of drive to be without any manual intervention, such as car parking and autonomous rally to a meeting point;
Google’s self-driving vehicle that conforms to California license requirements for driverless tests in open traffic;
Tesla model SD autonomous test car.
Although most market leaders agree that this is not a technology for mainstream production in the next few years, they all work very efficiently to master the technologies. It is a big challenge to integrate all the sensors and the navigation functions to autonomously and accurately position the vehicle on a map. The whole system must be certified to prevent any liability in case of a crash, a case that would engage the solution provider and the vehicle manufacturer.
A large part of the qualification task will benefit from simulations and integration testing platforms in realistic conditions. At the very least, a very robust final open-space validation test must take place. Car manufacturers/integrators are using private test facilities in open air to perform serious trials before proceeding to real traffic conditions. Renault uses a 10-square-kilometer facility in France (Figure 2) to perform private tests in a protected area.
Figure 2. Renault outdoor test center at Aubevoye, France.
New autonomous car drive tests have mandated equipment enabling measurement of the car’s position on the track with an extremely high precision and repeatability. There are two competing technologies to do this:
Install many location sensors on the test track;
Use a general absolute positioning system.
Here we focus on an absolute positioning system that is affordable, easy to install and low maintenance. It is based on two main assertions:
The autonomous pilot can position accurately on the test track;
The test track is accurately referenced to the absolute positioning system.
We focus more closely in this article on the first assertion; the second one can be covered with a specific calibration trial where equipment, as discussed further, can be used in quasi-static mode and experience consistent accuracy. Let us have a deeper look at the candidate position technologies to verify autonomous pilot accuracy.
Positioning Technologies
Many technologies have been proposed to obtain vehicle position on the course. However, they all must be compatible with a reliable mapping database. Given the lack of consistent road infrastructure equipment with alternative capabilities, GNSS positioning is the sole enabling method to fit to a map every place around the world. That is why driverless systems always include a GNSS sensor to help other data matching with the map. The versatility and low cost of GNSS positioning makes it a candidate for open-air validation as well.
Standalone Standard Positioning Service GPS. The SPS single-frequency GPS receivers are included in so many nomadic appliances today that they are a commodity. Since their introduction 20 years ago, their performance is well understood. Some trials were performed in different area profiles with satellite constellation position dilution of precision (PDOP) < 2. Worse results were obtained from deep urban canyons in downtown Seattle, Wash.
For every technology, the relevant performance for the test course is the lateral error to the expected center of the lane in the two horizontal dimensions, referred to as 2D or N/E for orientation north and east.
For standalone SPS GPS, the lateral error standard deviation in 2D can be as high as 46 meters and have peak errors up to 660 meters. Lateral error in 3D can be as high as 20 meters with peak errors up to 175 meters.
Such performances are out of range for any positioning verification. It can only deliver a rough estimate of the point on the map, but would not provide tight correlation with other sensors for the navigation system.
Hybridized IMU and SPS GPS. Coupling of an absolute navigation GPS receiver with an inertial measurement unit (IMU) can mitigate corruption of the navigation solution when intermittent GPS signal outage is encountered. The hybrid approach is beneficial on any difficult signal transmission path from the satellite that is not line-of-sight: in urban canyons, deep foliage, under bridges, tunnels and in any multipath area. It also yields benefits in the very short term (less than a few seconds) for dispersion on the position computed from the sky.
Over the last 10 years, the combined benefits of micro-electro-mechanical sensors (MEMS) and tight coupling algorithms have raised the bar of positioning accuracy. It enables smoothed position along track and dead reckoning (DR) in case of GNSS signal outage.
Lateral error standard deviation in 2D is lowered to 2.3 meters and peak error up to 10 meters. However, this performance is still too poor to validate a vehicle position in the lane.
Hybrid Differential Single Frequency and IMU. The next step to mitigate systematic errors of the GNSS system is to use a set of multiple reference receivers in the vicinity of the area covering the test course. The reference receivers are static. The position of the reference is determined using long-term averages to mitigate constellation errors. A minimum for a position fix of 20 minutes is commonly reported. Then the position error standard deviation in 2D is less than 2 centimeters for baselines shorter than 100 kilometers.
For a MEMS integrated with a standard SPS GPS single-frequency receiver with DGPS correction on a mobile platform moving at less than 70 km/hour with HDOP < 1.4, Table 1 compares performance in a 2013 test.
Hybrid Differential Dual-Frequency Carrier Phase and IMU. The GNSS solution can be further improved, taking into account both L1 and L2 frequencies to mitigate propagation error and carrier phase to achieve ultimate signal accuracy. The combination of both helps solve ambiguities associated with the carrier-phase technique. When combined with a MEMS IMU, accuracy confirmed with HDOP < 1.6 is:
Lateral error standard deviation down to 0.18 meters;
Peak error of 0.6 meter.
However, this is still insufficient accuracy when compared to 0.1 meter required for verification testing.
With such low-cost IMU, GPS outages produce a rapidly increasing lateral error over elapsed time. The lower the speed, the poorer the position result.
Another limitation common to many differential solutions is the turn-on delay for the solution. It is also a repetitive issue in case of disruption of the GNSS solution. It extends the delay to recover from DR situation.
Geodetics’ Epoch-by-Epoch
Geodetics Inc. has developed a new class of instantaneous, real-time precise GPS positioning and navigation algorithms, referred to as Epoch-by-Epoch (EBE) and employing hybridized dual-frequency differential GPS with a high-performance IMU.
Compared to conventional real-time kinematic (RTK), integer-cycle phase ambiguities are independently estimated for each and every observation epoch. Therefore, complications due to cycle slips, receiver loss-of-lock, power and communications outages, and constellation changes are minimized. There is no need for the initialization period (several seconds to several minutes) required by conventional RTK methods.
More importantly, there is no need for re-initialization immediately following loss-of-lock problems such as those that occur when a mobile GPS receiver passes under a bridge or other obstruction, or when it loses satellite visibility during a shaded portion of road. In addition, EBE provides precise positioning estimates over longer reference-receiver-to-user-receiver baselines than conventional RTK.
This feature supports testing for long-range operations, for example, such as positioning a vehicle on a lane. The reference receiver is set in the vicinity of the test center track.
EBE requires the use of a minimum of two receivers, each of which is tracking a common set of five or more satellites and providing simultaneous dual-frequency phase data. Typically, one of the receivers is stationary, but this is not a requirement.
EBE has been proven utilizing dual-frequency receivers and operating at distances of up to 50 kilometers from the nearest base station in unaided mode. Additionally, the EBE algorithms operate in a network environment and make optimal use of all GPS measurement data at each epoch, gracefully degrading the position accuracies when some measurement data are not available. Furthermore, the system will make use of an IMU system, compensating for outages when line-of-sight to the satellites is blocked. This produces a robust and more reliable system.
Epoch-by-Epoch can deliver several benefits including:
Computationally efficient algorithms that provide a position estimate based on a single epoch in several milliseconds. This allows the real-time position estimate to be computed on the user platform (assuming reference station data is sent to the user platform).
An initialization period is not required. Since RTK requires some period of time (that can be measured in seconds to minutes) to perform ambiguity resolution, this is an important capability for platforms that:
require high accuracy (for example, for end-game scoring);
cannot see the satellites until launch;
have short flight or test course duration;
A re-initialization period following loss-of-lock is not required, unlike RTK, which needs to restart the integer-cycle phase ambiguity resolution process. This is another important capability because vehicle monitoring is considering EBE for dynamic applications where loss-of-lock and loss-of-data are likely.
However, it must be mentioned that many of the GPS receivers in use by the test (and training) community today do not support this dual-frequency requirement. Hence, those systems could not realize the maximum benefit.
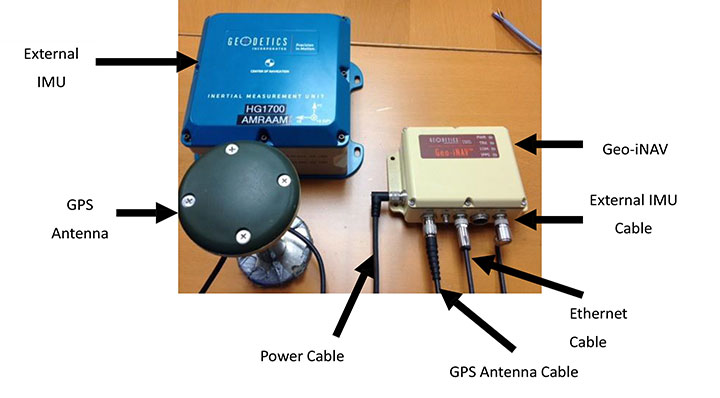
This technology is implemented in a rugged modular platform (Figure 3) with three main units:
A dual-frequency GPS antenna,
An integrated INS coupling GPS receiver with either an internal MEMS IMU or external IMU,
An external fiber-optic gyroscope (FOG) IMU for high-end accuracy and reliability. The external IMU is optional and dedicated to increasing the DR capability.
Figure 3. Dual-frequency differential navigation unit hybridized with external fiber-optic gyro.
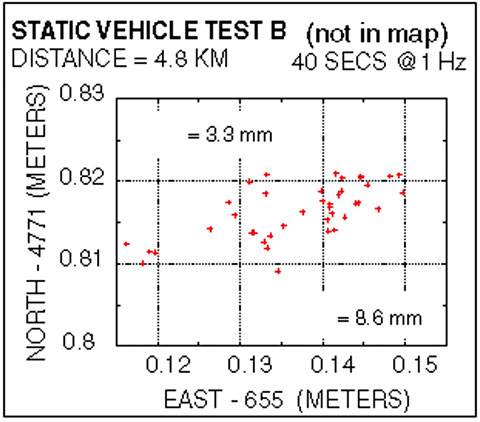
Performance. Tests have been performed in conditions close to the land-vehicle navigation validation. It is based on measurements on-the-fly with no post-processing except for evaluation of the error.
The first case is a static position of the rover 4.8 kilometers away from the reference receiver. Positions are updated once per second. The system includes a FOG IMU. the lateral error peak is less than 4 centimeters. Bias error is less than 1 centimeter. See Figure 4.
Figure 4. Single point error when rover is static.
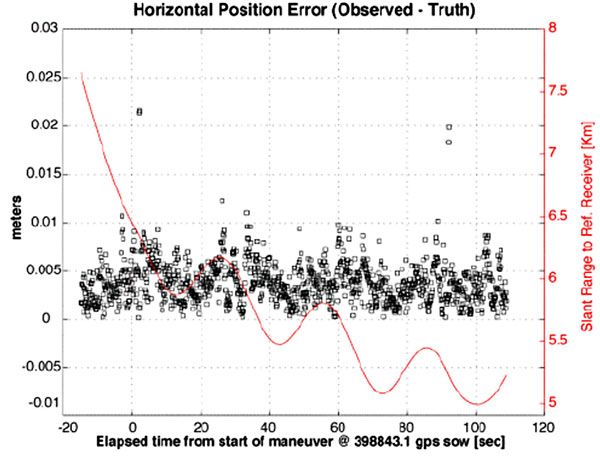
The second test case is with a high-dynamic mobile platform, moving at a speed of 200 km/h, with an average distance from the reference to the rover of 6 kilometers. Lateral error standard deviation is 0.5 centimeters, peak error is less than 2.2 centimeters. Bias error is lower than 0.2 centimeters (Figure 5).
Figure 5. Dynamic trial test single point error.
The performance in these test cases meets the expected accuracy for validation of autonomous navigation.
One last method to increase accuracy is to switch to a different class of IMU performance, from tactical grade to advanced. When in the line-of-sight of the GNSS sky-view, the performance is the nearly the same.
Conclusion
A real-time, differential Epoch-by-Epoch, dual-frequency carrier-phase GPS receiver, tightly hybridized with a high-performance IMU can provide absolute error lower than 5 centimeters in the 10-kilometer baseline range of the reference static receiver. This is fully adapted to the qualification of driverless auto-pilot systems for the targeted year of 2020. It can avoid the need to use complex theodolite and vision calibration systems. It provides maximum flexibility and minimum sustaining costs.
Acknowledgment
This study has been made possible thanks to materials provided by Geodetics Inc. and the advice of Jeffrey A. Fayman, vice president, Business & Product Development, Geodetics Inc. The results displayed in Figures 4 and 5 are from a test with a medium-sized UAV from Allied Drones, model EF44 high-endurance quad.
Manufacturers
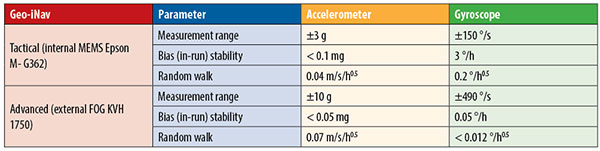
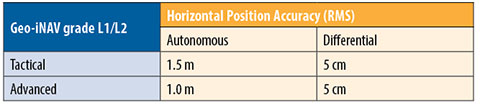
The Geo-iNAV family is a range of GPS-aided INS solutions available in different configurations, including various GPS receivers (L1, L1/L2 RTK, SAASM), internal MEMS or external FOG IMU. As part of this family, the Geo-RelNAV provides differential GPS relative navigation capability, the Geo-hNAV includes a dual GPS antenna receiver for static heading measurement capability, and the Geo-PNT combines position and attitude measurement with precise timing distribution.
Gilles Boime is is chief scientist for Spectracom. He is involved in GNSS signal generator, hybridized navigation platforms, GNSS timing and synchronization innovative solutions build-up. He holds an engineering diploma in telecommunication from Institut Superieur d’Electronique de Paris.
Emmanuel Sicsik-Pare is strategic product manager for Spectracom. He is involved in timing and navigation products and systems definition and application market monitoring. He holds a M.Sc degree from Telecom Bretagne.
John Fischer is CTO of Spectracom. He has more than 30 years experience creating navigation and communications systems, received his master’s in electrical engineering from SUNY at Buffalo. Prior to joining Spectracom, he worked in radar, command and control, and wireless systems.