The creed “Neither snow nor rain nor heat” may apply to postal workers, but it also could apply to land surveyors.
Today’s surveyors rely on GNSS as a critical tool to enable completion of their tasks, whether defining a property boundary or mapping mining drill sites.
In the articles that follow, surveyors share their success stories using the latest GNSS receivers, software and correction services, all of which are constantly improving to make their tasks easier — despite the terrain or weather conditions.
How one man triumphs
Adam Plumley is a one-man surveying shop in North Carolina. He also wears another hat as a sales, support and product development consultant to Javad GNSS.
“As a land surveyor, I use the equipment every day,” Plumley said. “Javad’s equipment has made it possible for me to operate solo.”

In the project pictured above, Plumley surveyed a 50-acre farm parcel to separate out the six-acre improved northeast corner. “I located the creek, building and improvements on the property east of the road and ran the lines to the creek on the west side of the road.”
The difficult locations on this 2016 survey were at the creeks. It took Plumley up to a half hour to locate the corners and creek points under the tree canopy.
“It would have taken much longer than it did if I had traversed the boundary conventionally,” he said, “not to mention I would have been much more tired at the end of the day.”
Instead, Plumley used a Javad GNSS Triumph LS and Triumph 2 base/rover system with corrections broadcast over the internet.
“I set up the Triumph 2 base about one mile away in an open yard with great sky view. It took me one day to do the initial recon and locations, and another couple of hours to set the new corners the next day,” he said.
Plumley has since upgraded his base receiver to another Triumph LS and added a J-Link 35-watt external radio to his toolbox.
“One thing this and other challenging surveys have taught me is to be patient. To obtain accurate results that you can be confident in takes time.”
About our cover
Our cover photo this month was taken in June 2019 by surveyor Stephen Drake, near his home on the north coast of California. “These redwood forests and very rugged, remote coastal mountains can really test you,” he said. He was using his Javad Triumph-LS rover with the J-Field built-in surveying software, communicating to a Javad GNSS Triumph-2 base station attached to his house. A Verizon Jetpac mobile hotspot (in the black pack hanging below the Triumph-LS in the photo) picks up signals from his home router; the port-forwarded corrections are configured with Javad software.
Stephen calls this his standard configuration, but finds it very flexible. When he is more than 20 miles from home base, he relies on a Triumph-2 and a radio modem placed near the site. He can also use the California Real Time Network (CRTN) with the Jetpac.
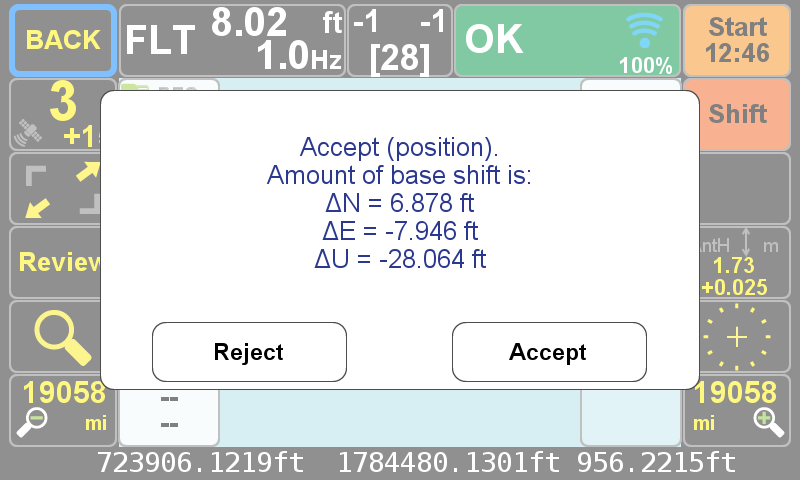
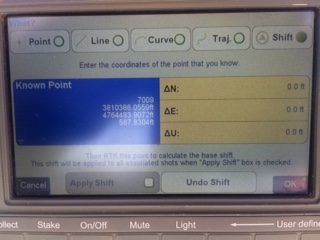
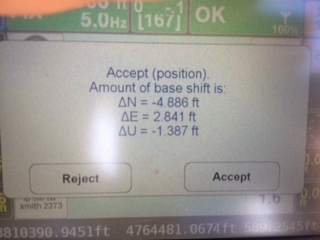
He also relies on Javad’s Hybrid RTK, automated post-processing with Javad’s DPOS, automatically generated raw data and quality reports, and the many built-in indicators in J-Field that provide real-time feedback and “give me assurance on almost every measurement before I walk away from it,” he said.
The efficiency that his equipment provides has made Stephen valuable even to firms that already have in-house surveyors, he said. “I honestly do not think I would be here without Javad. It has been a true potent business partner.”
Read about another one of Stephen’s projects here.
Check out more surveying case studies here.
- Surveying switchbacks in the Northern California mountains
- Remembering all fixes for verification
- Smart surveying in the Outback
- Tersus GNSS goes ultimate with new generation of tilt survey receiver
- New players offering GNSS correction services
Feature image: AP Surveying PLLC