Javad GNSS President & CEO Javad Ashjaee discusses the company’s new J-Mate total station, newest generation Triumph chip, Omega receiver and J-Shield filter. The interview took place at Intergeo 2018 in Frankfurt, Germany.
Tag: Triumph
-

J-Mate combines GNSS/terrestrial for accuracy
Javad GNSS has taken the power of its Triumph system and expanded to ground-based measurement technologies (versus satellite-based positioning) with the J-Mate.
The J-Mate is a new measurement module that combines conventional measurement via laser scanning and photographic imagery with the multi-constellation location accuracy of the Triumph-LS receiver.
Unlike most conventional total stations, J-Mate does not contain optics for manual use. It does, however, utilize precision horizontal and vertical encoders for angular measurement while the high-definition camera and laser module combine to locate the USB-powered target for accurate measurements, the company said.
The target rest on top of the receiver and lights up for better visibility to the camera and sensor. The lighting power comes through the USB cord connected to the receiver.
Coupled with the onboard data collector screen of the Triumph-LS, operation of the module is done visually with the LS mounted on top of the module or remotely on the J-Pod pole used for GNSS data collection.
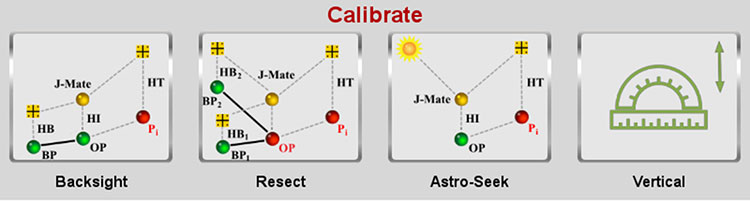
Setup of the module for survey data collection can be accomplished by several different methods: Backsight, Resect or Astro-Seek.
The Backsight method of station establishment, while following in the manner of traditional total stations, can be accomplished by several different methods utilizing the J-Mate and Triumph-LS.
- The first option is to occupy a known station with pre-established horizontal and vertical values, and then proceed to orient the instrument to another known station.
- The second option is using the Triumph-LS GNSS engines to establish a station coordinate value, perform the same procedure on the reference station, and use the J-Mate software to calculate backsight azimuth for orientation.
- The last option is to use a combination of the known coordinates or collect GNSS-derived values for either station or backsight point and complete the station setup.
The Resect method is utilized when occupied station cannot use GNSS-observed coordinate values but can view two or more stations with known values. Once the user has measured all the visible know stations, the data-collection software provides geometric precision analysis and a coordinate solution if tolerances are acceptable.
The last method of orientation, Astro-Seek, can observe solar or lunar positions to accurately determine the location and orientation of the station. The user installs a darkening filter for solar observations and starts the Astro-Seek process; the module automatically makes necessary remaining measurements and calculations.
J-Mate screen (Image: Javad GNSS) The J-Mate system is equipped with system parameters that allows the user to customize a variety of settings, including minimum and maximum collection distance, windowing of project area, and edge definition tolerance to fine tune scanning small objects. Also definable within the window area is the scan spacing variable, used to minimize the number of data points where needed.
According to Javad GNSS, the range of the J-Mate is rated at 100 meters (328 U.S. survey feet) using the Javad target and to most white surfaces, while the rating for darker surfaces is 50 meters (164 U.S. survey feet). Three precision vials are placed around the top for visual verification of levelness in addition to the electronic leveling mechanism, giving the user on-the-fly notification of any unstableness of the instrument.
The J-Mate isn’t exclusively a data collection system, though; this module and software is also designed to be an efficient staking application. Taking advantage of robust servos and effective targeting system, this system performs dutifully for staking applications where accuracy and precision are required.
-

Get Full Advantage from Many Profitable Features In One Compact RTK Rover
The TRIUMPH-LS receiver, by JAVAD GNSS. The TRIUMPH-LS and its field software, J-Field, have many revolutionary and innovative features compared to current GNSS systems. Here is a quick overview of its most salient features, making it an ideal unit for surveyors in the field and managing from the office.
The TRIUMPH-LS contains everything needed to function as a complete RTK rover in one small, compact, ergonomic and very portable unit:
- an 864-channel GNSS receiver
- a UHF or spread spectrum radio, a GSM modem
- a Wi-Fi adapter
- two internal cameras
- a flashlight
- a bright 800 x 480 pixel display.
Also included with the system is a collapsible monopod rover pole which allows the unit to be quickly folded up to fit in a very small space, perfect for carrying the system in the field or quickly stowing inside a vehicle. The lack of a data collector bracketed to the rover pole further increases its portability; the user can carry the system through the woods without having to worry about an extruding data collector getting caught in brush.
This system was ergonomically engineered; the head-height vertical display allows the user to operate the TRIUMPH-LS while standing in an upright position and looking forward. Users do not need to bend their neck to look down to view the display, as is traditionally done with a system having a data collector attached to a rover pole. This Triumph feature allows the system to be used without the neck soreness that can plague a user after working for extended periods of time.
The TRIUMPH-LS contains a built-in compass and tilt sensors. The compass enables quick and efficient stake-out of points. Forward/back and left/right offset readings relative to the face of the display show precisely where the stake-out point is located. This stakeout method reduces the time required for this task, compared to using traditional north/south and east/west offsets. The built-in tilt sensors can be used in lieu of having to plumb the rover pole. Taking advantage of the tilt sensors is also a “Lift & Tilt” mode that means topo points can be collected without pressing any buttons. In this mode, when the TRIUMPH-LS is plumbed, a point will automatically start collecting and can be programmed to collect a set number of epochs or to stop collection when the unit is tilted. After the point is collected, the user tilts the TRIUMPH-LS and walks to the next point, which will be collected when the unit is plumbed again.
Software. The field software, J-Field, is included at no extra charge with the system. There is no need for an external data collector or software. J-Field is constantly being improved, and updates will always be available free of charge with the system. The updates can be downloaded through Wi-Fi and are very simple to install, requiring only a couple of button presses to update the system.
J-Field features six separate, parallel RTK engines that all run simultaneously with separate assumptions. This allows for fixes to be obtained quicker than if only a single RTK engine were used. It has an advanced RTK verification system that can be used in difficult RTK environments where there is high multipath and/or tree canopy cover. This process will automatically reset the RTK engines and eliminate points from being collected with bad RTK fixes that often plague other systems in difficult locations.
With the built-in GSM modem, it is very easy to connect to real-time networks (RTNs). Alternately, it can also be connected through Wi-Fi using a mobile hotspot.
Full CAD features are in the process of being developed for use with the map screen. The ability to draw lines, polylines, circles and arcs will be supported. Using the planned move, copy, offset and rotate commands, much of the same CAD work that is traditionally done in the office will now be able to be completed in the field. This very beneficial feature can reduce the number of return visits to a project site.
J-Field has many customization features that can be used to increase productivity as your knowledge of the system grows. The stake and collect screens have eight white boxes that are easily customized to display a number of fields that the user may desire.