Highly cost-effective autonomous marine drone for bathymetric surveys
Photo: CHC Navigation
The new Apache3 Marine Drone — 2020 Edition provides a series of new features and additional enhancements to make lake, river and coastal hydrographic surveys more productive, according to maker CHC Navigation.
Combining a dual GNSS positioning and heading sensor, a stable and reliable hull attitude and an inertial measurement unit (IMU) sensor, the Apache3 unmanned surface vehicle (USV) allows an uninterrupted survey while passing under bridges.
Its high-efficiency 8-meters-per-second motors and absolute straight-line technology enable a fully automatic, predetermined course in adverse current conditions.
The Apache3 features include:
GNSS/INS control box to maintain high accuracy during transient GNSS outage
Integrated 4G and LAN transmission module
Sonic radar for obstacle avoidance
Automatic return to base planning
360° PTZ camera (pan, tilt, zoom)
Overspeed engines to allow operation in most water conditions
According to CHC Navigation, the Apache3 — 2020 Edition offers an exceptional feature/price ratio, making it one of the most competitive professional marine UAV solutions for single-beam bathymetric surveys.
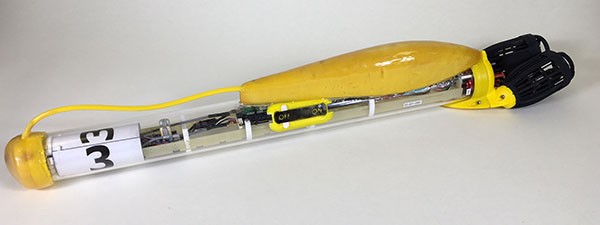
SwarmDivers by Aquabotix are micro swarming unmanned surface vehicles (USVs) capable of diving to 50 meters and swarming in groups of 40 or more.
Multiple SwarmDivers can function simultaneously as a single coordinated entity, be easily controlled via one operator on the surface and perform dives on command to collect valuable intelligence.
Their design delivers rugged reliability and accuracy for applications requiring specialized sensor payloads in defense, oceanography, aquaculture, research and hydrographic survey, the company said. The units also operate collectively to quickly gather data and report back in near real time.
This screenshot from an Aquabotix video shows the swarm returning to base. (Image: Aquabotix)
The swarming algorithm allows vehicles to communicate with each other to make decisions as a group. This allows SwarmDiver to quickly and accurately self-arrange in various swarm formations as well as dive simultaneously to collect synoptic data sets.
With the ability to be outfitted with customized payloads and sensors, SwarmDiver can meet a wide range of mission profiles, Aquabotix said.
For the defense community, SwarmDiver could provide surf-break-zone operations support, enhanced navigational capabilities, explosive ordnance disposal and mine countermeasures.
A research team at Florida Atlantic University’s (FAU) College of Engineering and Computer Science has received a $187,000 grant from the Florida Department of Transportation (FDOT) to develop autonomous waterborne vehicles that can assist in bridge inspections.
Although the technology is still in the early stages of development, the long-term aim is that the unmanned surface vehicles (USVs) could be used by the agency to make bridge inspectors’ work safer and more efficient, according to GovTech.com. FDOT currently uses a variety of methods and equipment to inspect and test the sections of the state’s 11,451 bridges that are above water level. However, the only method that can be used to check the sub-surface areas is divers, who search for cracks, erosion, damage and defects that might impact on a bridge’s safety. A high percentage of Florida’s bridges are in corrosive salt water, and divers frequently experience problems with low visibility from silt, sediment, debris and algae, weed or other plant matter.
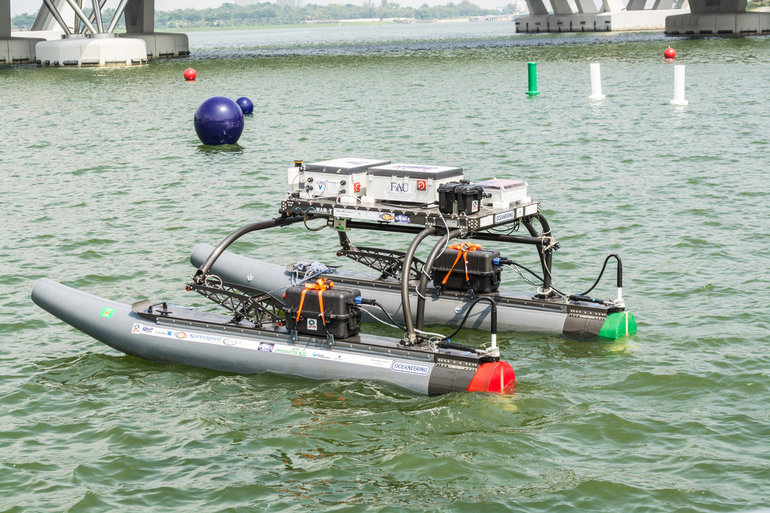
The team from FAU’s Department of Ocean and Mechanical Engineering have experience in USV research, and won second place at the eighth annual International RoboBoat Competition in Virginia Beach, Va., according to GovTech.com.
Two months into a 12-month project, the team has upgraded a watercraft used for past research projects with a new propulsion system that allows the craft to maintain its position and heading during a bridge scan. The next phase of research will be to equip the craft with an acoustic scanning system that functions in a similar manner to a LiDAR (Light Detection and Ranging) system. By installing the scanner on a mount that can tilt and pan, researchers expect to obtain 3D models of the parts of the bridge that are below the water.
The current vessel is equipped with an automatic control system that uses GPS and a compass to direct the craft toward programmed waypoints, and can keep it steady in a variable current, allowing scanning to take place. Once the acoustic scanner is equipped in September, the team will begin testing the craft’s scanning capabilities on three bridges that have been recommended by FDOT for their diverse representation of the state’s bridge environments.
“These sorts of technologies aren’t really meant to replace wholesale divers and so forth,” the FAU project’s principal investigator, Karl von Ellenrieder, told GovTech.com. “It’s to make their jobs easier, and it’s another tool that can help them do their jobs better. The way I view it is, you would take a vehicle like this and it would allow you to more rapidly scan bridges, and then when you detect a problem, send out a diver to verify the problem through testing. If you’re going to send divers out into strong currents with nasty snakes and stuff, it’s better to have a good sense there’s a problem before you do that.”
A research team at Florida Atlantic University’s (FAU) College of Engineering and Computer Science has received a $187,000 grant from the Florida Department of Transportation (FDOT) to develop autonomous waterborne vehicles that can assist in bridge inspections.
Although the technology is still in the early stages of development, the long-term aim is that the unmanned surface vehicles (USVs) could be used by the agency to make bridge inspectors’ work safer and more efficient, according to GovTech.com. FDOT currently uses a variety of methods and equipment to inspect and test the sections of the state’s 11,451 bridges that are above water level. However, the only method that can be used to check the sub-surface areas is divers, who search for cracks, erosion, damage and defects that might impact on a bridge’s safety. A high percentage of Florida’s bridges are in corrosive salt water, and divers frequently experience problems with low visibility from silt, sediment, debris and algae, weed or other plant matter.
The team from FAU’s Department of Ocean and Mechanical Engineering have experience in USV research, and won second place at the eighth annual International RoboBoat Competition in Virginia Beach, Va., according to GovTech.com.
Two months into a 12-month project, the team has upgraded a watercraft used for past research projects with a new propulsion system that allows the craft to maintain its position and heading during a bridge scan. The next phase of research will be to equip the craft with an acoustic scanning system that functions in a similar manner to a LiDAR (Light Detection and Ranging) system. By installing the scanner on a mount that can tilt and pan, researchers expect to obtain 3D models of the parts of the bridge that are below the water.
The current vessel is equipped with an automatic control system that uses GPS and a compass to direct the craft toward programmed waypoints, and can keep it steady in a variable current, allowing scanning to take place. Once the acoustic scanner is equipped in September, the team will begin testing the craft’s scanning capabilities on three bridges that have been recommended by FDOT for their diverse representation of the state’s bridge environments.
“These sorts of technologies aren’t really meant to replace wholesale divers and so forth,” the FAU project’s principal investigator, Karl von Ellenrieder, told GovTech.com. “It’s to make their jobs easier, and it’s another tool that can help them do their jobs better. The way I view it is, you would take a vehicle like this and it would allow you to more rapidly scan bridges, and then when you detect a problem, send out a diver to verify the problem through testing. If you’re going to send divers out into strong currents with nasty snakes and stuff, it’s better to have a good sense there’s a problem before you do that.”