Successful European Cooperation
Galileo is Europe’s civil global satellite navigation constellation and a major success, being the world’s most precise satnav system and offering meter-scale accuracy to more than two billion users around the globe.
The signature of the Financial Framework Partnership Agreement (FFPA) on June 22, 2021, further strengthened effective cooperation between the European Commission (EC), the European Union Agency for the Space Program (EUSPA), and the European Space Agency (ESA) — key to successfully achieving a crucial EU Space Program component like Galileo in the current EU Multi Financial Framework (2021–2028).
The EC is the program manager, with EUSPA acting as the exploitation manager and ESA as the system development prime.
Stable Service Performance
Galileo continues to deliver excellent service performance every month in a safe, secure and seamless manner. Delivery of Galileo services is managed by EUSPA, as the Galileo service provider, with industrial partner SpaceOpal, the Galileo service operator prime contractor. The performance of Galileo services is independently monitored by the Galileo Reference Center (GRC) and regularly published on the GNSS Service Center (GSC) web portal at www.gsc-europa.eu — both agencies were developed by GMV. The security of the Galileo System is monitored by the Galileo Security Monitoring Centers (GSMC), operated by EUSPA.
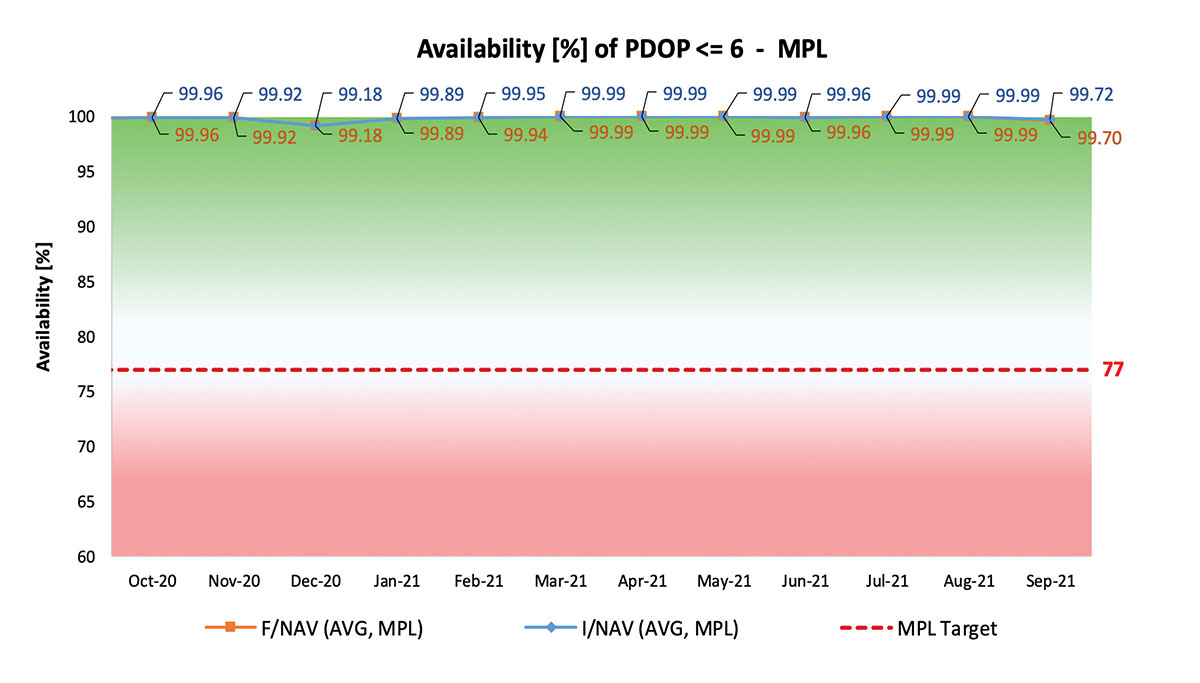
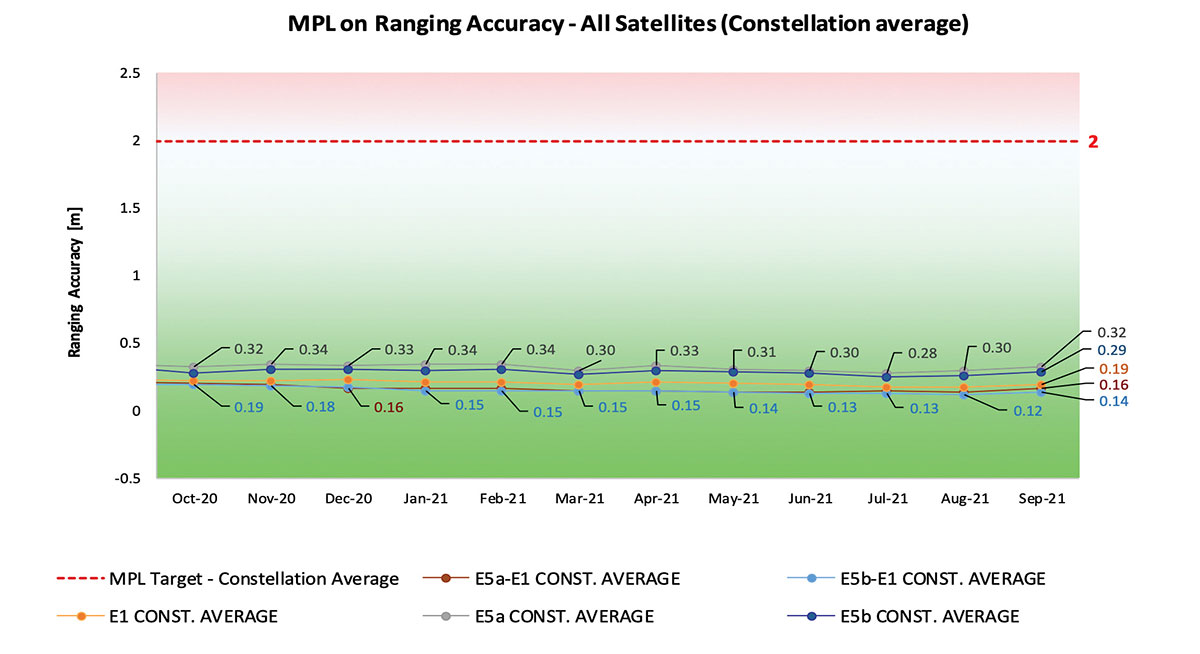
With 22 satellites in service, the open service is already delivering more than 99% availability of PDOP <= 6 worldwide. This, together with the excellent ranging accuracy, suggests that most Galileo dual-frequency users are typically experiencing positioning accuracy in the order of only 2 to 3 meters.
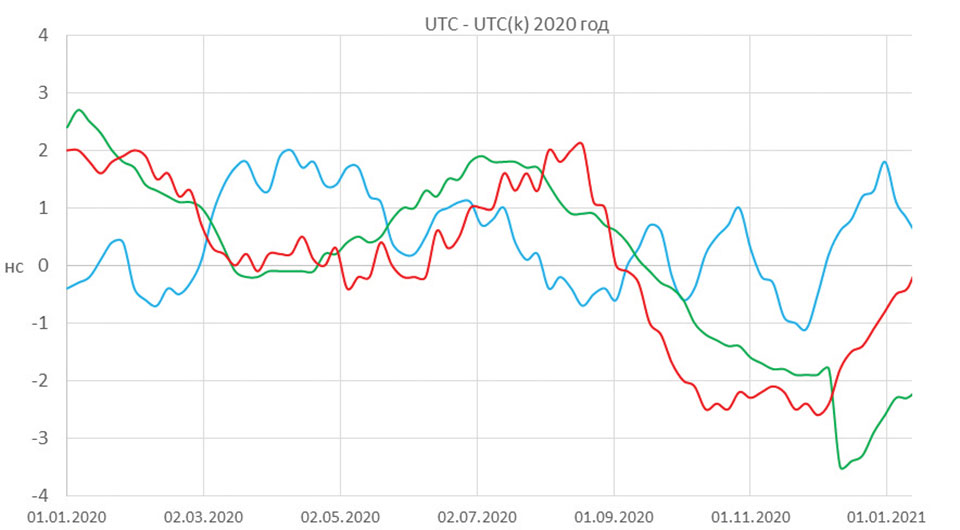
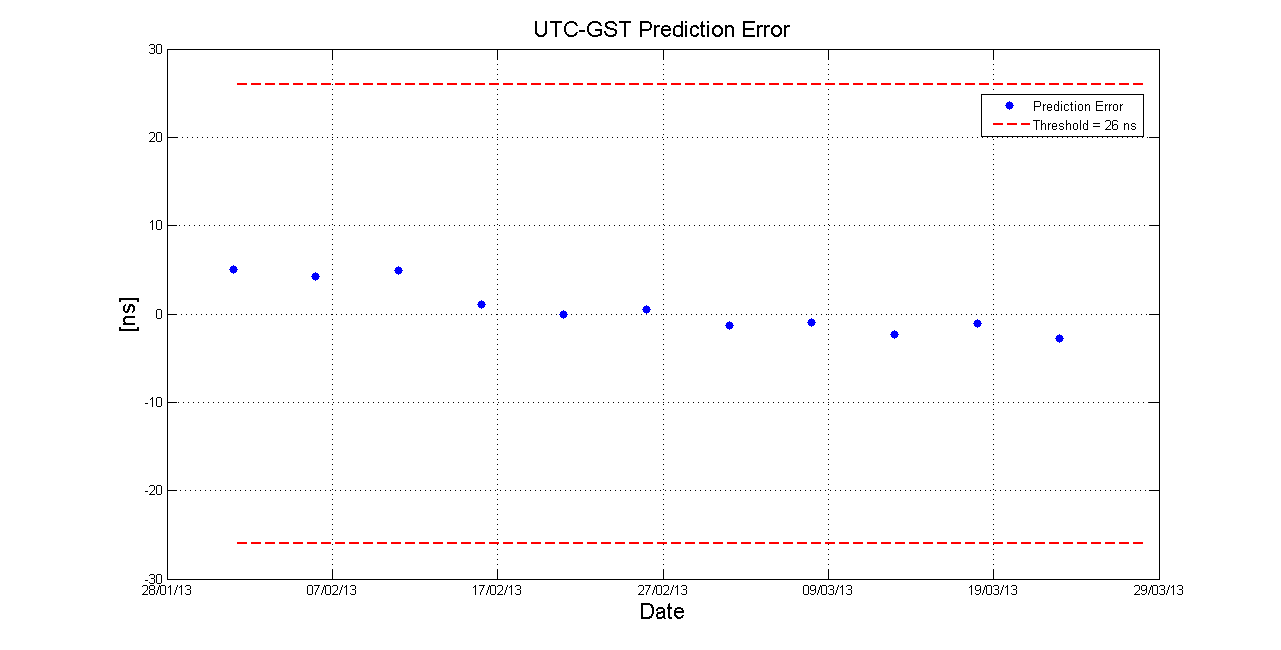
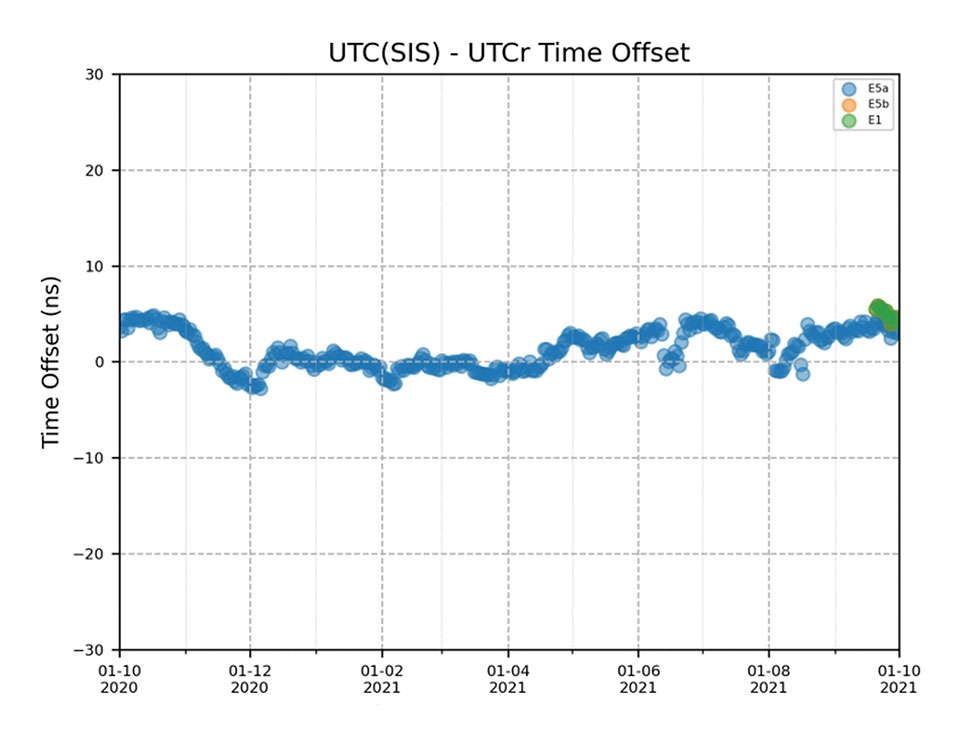
Timing users also continue to receive accurate (in the order of 5 ns) access to Galileo System Time, which they can trace to Universal Coordinated Time (UTC) through the corresponding offset parameters transmitted by the satellites.
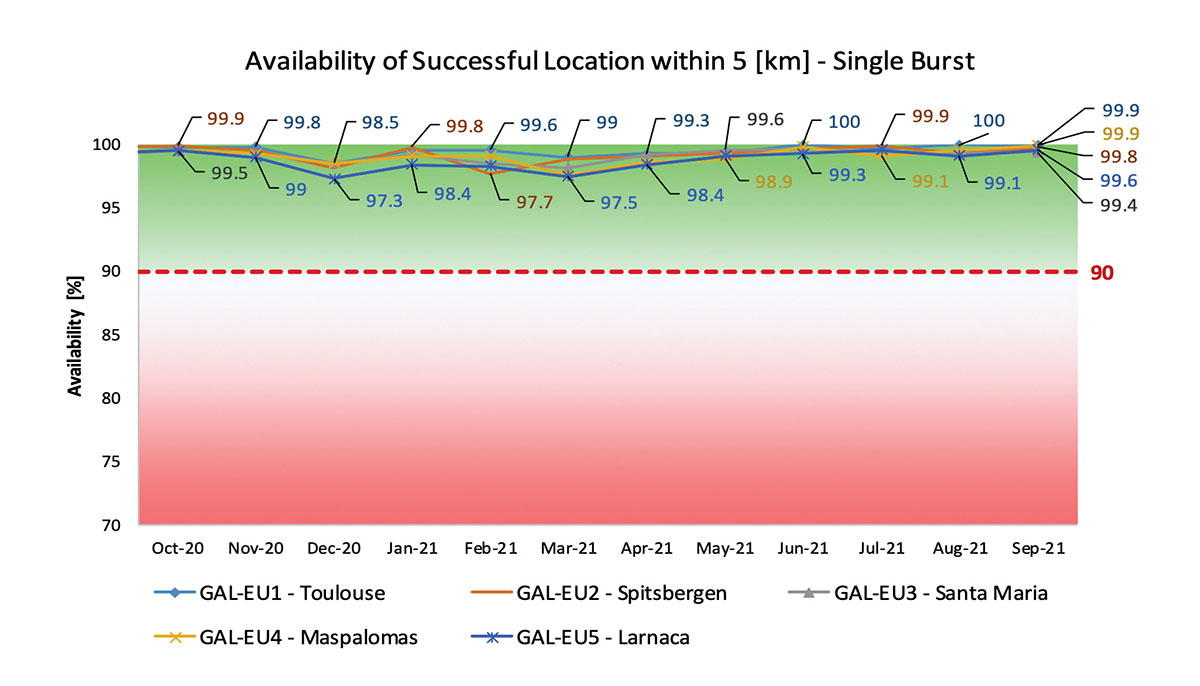
The SAR/Galileo service, contributing to COSPAS/SARSAT, continues to deliver both the Forward Link Service (FLS) and the Return Link Service (RLS) with more than 99% availability, allowing users in distress not only to issue an alert and be located within a few minutes, but also be notified that the alert was successfully processed and rescue is on the way. The SAR/Galileo control center is located in Toulouse (France) and operated by CNES under the authority of EUSPA. The excellent performance of the service has been demonstrated both through several rescue exercises and real-life emergencies.
Galileo Launch 11
Soyuz launcher VS-26 lifted off from French Guiana with the first pair of Galileo Batch 3 satellites on Dec. 5, 2021, at 01:19 CET. This marks the 11th Galileo launch of operational satellites in 10 years: a decade of hard work by Europe’s Galileo partners and European industry. With these satellites, the robustness of the constellation has increased, guaranteeing a higher level of service.
Thanks to an upgrade of the Ground Control Segment, the Launch and Early Orbit Phase has been for the first time conducted directly from the Galileo Control Center, rather than requiring an external mission control site. This version of the ground segment increases overall reliability and cybersecurity and opens the way to significant expansion of the Galileo constellation, allowing command and control of up to 38 satellites. The development has been performed by an industrial consortium led by GMV, harnessing state-of-the-art technology using the latest solutions on the market.

On Route to Full Operational Capability
This year will pave the way toward Full Operational Capability of Galileo services.
Industrial prime contractor OHB Systems has nearly completed production of the additional 10 recurrent satellites belonging to Galileo Batch 3. Six of them are undergoing final acceptance testing at the ESA satellite test center, and the other four are under integration at the satellite prime facilities.
Preparation for Launch 12 has already started, with the satellites’ acceptance for a launch date planned in the first months of 2022, followed by Launch 13 in autumn. This is leading toward completion of the Galileo constellation, providing an increased availability of the Galileo signal in space for both GNSS and search-and-rescue users.
From 2023 onward, the remaining Batch 3 satellites will be launched with the new Ariane 62 launch vehicle, a variant of Ariane 6 with two strap-on solid boosters. The launcher is undergoing the final stages of development, led by prime contractor ArianeGroup.
The Galileo Ground Mission Segment will undergo a complete technological refresh, including hardware virtualization and porting of several million lines of code, performed by an industrial consortium led by Thales France. A series of improvements will be introduced to increase system resilience, including an extended mode of operation to improve service continuity and robustness.
Cybersecurity monitoring of all the ground assets will be introduced as an overlay to the current ground infrastructure. The upgrade will undergo a rigorous level of qualification testing followed by worldwide deployment in a seamless way in both Galileo control centers, in both Galileo security monitoring centers, and at all remote locations without affecting continuity of service.
The service facilities that contribute to the delivery of Galileo services (the European GNSS Service Center, the Galileo Reference Center, and the SAR data service providers) will also evolve to support not only the transition from Initial Services to Full Operational Capability, but also the early roll-out of service evolutions. In this regard, extensive work is ongoing to deliver an exciting set of improvements, some of which are already in development or testing, to reach the users in the year to come:
- Improvements of the I/NAV signal to increase robustness and time-to-first-fix, while assuring full backward compatibility with legacy receivers.
- OS Navigation Message Authentication (OS-NMA) to support applications that require trust in the authenticity of the data transmitted by the Galileo satellites (a public observation campaign was launched in November 2021 to engage stakeholders and collect their feedback before moving to the initial service provision).
- An initial phase of the High Accuracy Service, delivering corrections in the Galileo E6 signal and over terrestrial network to allow users to perform precise point positioning over Europe; test signals were already transmitted with promising results.
- A Search and Rescue Beacon Command Service complementing the SAR Return Link, providing improved capabilities to timely locate beacons under authorized emergency situations (such as the disappearance of Flight MH370 in the Indian Ocean in 2014).
- A first implementation of an Emergency Warning Service over Europe, allowing the authorized national emergency-management authorities of the EU Member States to relay alert messages through Galileo signals, which can reach target areas even in case of disrupted terrestrial communications (such as due to floods or earthquakes).

Second Generation in the Making
The FFPA will bring Galileo to the next level with the development of the second generation, a further step forward with the use of many innovative technologies to guarantee the system’s unprecedented precision, robustness and flexibility.
In parallel to the completion of the first generation of Galileo, Europe has conducted in recent years preparation activities for the Second Generation (G2). Elaborating on market, user and exploitation needs collected by EUSPA, ESA identified a number of system evolution scenarios, which were discussed among relevant EU stakeholders to select the second-generation mission and services baseline to build the system infrastructure.
The evolution of Galileo capabilities will not only provide better services through advanced technical solutions identified by ESA, but will also ensure continuity of service and backward compatibility for
first-generation legacy users.
Two parallel contracts to develop and manufacture each of the six Galileo Second Generation Batch#1 satellites were kicked off in the first half of 2021 with Thales Alenia Space (Italy) and Airbus Defence & Space (Germany). The new G2 satellites will be constructed on a short time scale, with their first launch via Ariane-62 expected in less than four years, allowing them to commence operations in space as soon as possible. Both contracts have already undergone preliminary design reviews.
Development of the G2 satellites is supported by the Galileo Payload Test Bed, which provides an early proof-of-concept of the advanced G2 payload architecture. These satellites will provide, among others, the following key innovations:
- Reconfigurable fully digital navigation payload.
- Point-to-point connection between satellites by Inter-Satellite-Link for command and control and ranging functionalities.
- Electric propulsion for orbit-raising capabilities.
- Advanced jamming and spoofing protection mechanisms to safeguard Galileo signals.
System and Ground Segment definition studies, together with the associated technology pre-developments, have been performed, leading to the definition of the preliminary design and technical requirement baseline for the G2 system, a project involving most of Europe’s space industrial partners.
The G2 In-Orbit Validation Ground Segment and System Test Bed have been defined and relevant procurement procedures are ongoing, with these objectives:
- G2 Batch#1 satellites launch and early orbit phase, in-orbit testing and enhanced legacy services provision.
- G2 new capabilities in-orbit validation, including prototyping and validation of all the novel technologies that can exploit the full capabilities of the G2 Batch#1 satellites.

Definition activities for the G2 Initial Orbit Capability (IOC) are progressing well and are expected to converge in the first half of 2022, in order to establish the future roadmap for new G2 services provision in the years to come.
2022 will be a key year for the evolution of Galileo Second Generation activities, through the consolidation of the first batch of G2 satellite design and development activities and the start of development of associated G2G IOV Ground Segment and System Test Beds.
A bright future awaits Galileo, both through the completion of its Final Operational Capability and the start of evolution towards Galileo Second Generation.
Guerric Pont is Galileo Exploitation Program manager for the European Union Agency for the Space Program (EUSPA).
Marco Falcone is Galileo First Generation Project manager for the European Space Agency (ESA).
Miguel Manteiga Bautista is Galileo Second Generation Project manager for the European Space Agency (ESA).