It has been 78 years since 110,000 Japanese-Americans were forcibly interned in 10 camps across the United States.
In 1942, President Franklin Roosevelt signed an executive order announcing their internment. When World War II ended in 1945, the 10 camps were unceremoniously abandoned. The people interned there, their descendants, and historical groups are now trying to preserve memory of the camps.
A new Esri StoryMap from Eos Positioning Systems explores the stories of two men whose lives were connected by Amache Internment Camp in southeastern Colorado.
In the first chapters, we meet Dennis Otsuji, a renowned landscape architect who was born at Amache in 1943. Then we meet Jim Casey, GIS user and philanthropist on a quest to preserve Amache. Besides using Esri ArcGIS Online tools, Casey used the Arrow Gold GNSS receiver from Eos Positioning Systems for ground control points.
In an unlikely story twist, Otsuji and Casey happened to meet when Otsuji went searching for his past, just as Casey was working to preserve the past. The StoryMap ends with the first augmented-reality look at Amache.
Image: metamorworks/iStock/Getty Images Plus/Getty ImagesChris Hogstrom, Spirent Federal Systems
Inertial navigation systems (INS), like most navigation systems, have evolved through countless iterations and improvements over many years. An INS, unlike other navigation technologies, does not rely on any external signals or inputs to aid navigation. It is, therefore, extremely difficult to spoof, jam or disrupt the system, and solar flares, ground/sky visibility and climate do not affect its ability to aid in navigation — unlike GNSS.
An INS knows where it is going because it knows where it has been. Modern INS use a minimum of three orthogonal accelerometers to measure accelerations in the x, y, z planes and a minimum of three orthogonal gyroscopes to measure the angular accelerations about the x, y, z planes. When the INS is initializing, its current location is fed into the system. After initialization, the INS utilizes the sensor outputs to determine its position relative to its starting point.
The INS made its debut during World War II, where it was used to guide German V2 missiles. At the time, the INS was still rather primitive, using two two-degrees-of-freedom gyroscopes and one integrating accelerometer. It wasn’t until the war’s end that Wernher von Braun and his team developed a stable platform with three single-degree-of-freedom gyroscopes and an integrating accelerometer.
World War II Innovation
Once the war was over, the United States Army acquired many of the lead scientists from the German V2 project and furthered research into INS. The Air Force also had an interest in INS and contracted Northrop Aircraft (now Northrop Grumman) to develop the guidance system aboard the SNARK cruise missile. However, the work under Charles Draper at MIT’s Instrumentation Laboratory spearheaded INS for use in aircraft. Draper was an amateur pilot and quickly saw the benefits that a self-contained system provided over the navigation systems of the day. The developments made by the Instrumentation Laboratory led to the success of the inertial-guided transcontinental flight in 1953.
By the late 1960s, military bombers and aircraft used INS, and by the early 1970s, it was commonplace in commercial aircraft, too. Today, INS technology can be found in aircraft, spacecraft, ships and submarines, as well as smartphones, watches and other wearable tech. It has quickly become an essential enabling technology for autonomous vehicles, and future applications are being studied.
The biggest weakness of INS is that they drift over time. This means that the longer an INS functions, the less accurate it becomes. For this reason, many INS are part of a sensor-fusion system. Incorporating data from many different sensors — such as GPS, a barometer, a compass and INS — a sensor-fusion system combines data through a Kalman filter to determine a more reliable and accurate positioning and navigation solution.
Best of Both Worlds
By combining INS with GPS, you get the benefit of both systems while minimizing their weaknesses. GPS and other GNSS have quickly become the gold standard for accurate positioning, as well as being the only global source of absolute position. Receivers tracking four or more satellites can provide their precise location anywhere on Earth.
However, GPS has significant and well-documented weaknesses. These stem, primarily, from the fact that GPS signals are extremely weak by the time they reach terrestrial users. This means that GPS signals, intentionally or otherwise, are easy to jam, and the broadcast nature of the signals means they are open to a variety of spoofing attacks. Fusion systems using an INS and GPS receiver can rely on GPS when the GPS signal is unobstructed, and switch to the INS solution when GPS is unreliable.
In a world where aircraft are now able to fly themselves and cars are quickly achieving autonomy, our dependence on these sensors is ever-increasing. Autonomous solutions with a navigation sensor suite of multiple sensor types are becoming common. Sensor suites can include other vehicle sensors that aid absolute positioning by sensing parameters such as steering angles, wheel rotations, etc. They are also beginning to incorporate non-GNSS-based RF signals to aid in navigation. Multiple sensors offer increased redundancy, helping achieve the required safety levels and the desired performance boundaries.
High-Mileage Testing
Testing and optimizing these sensor-fusion systems presents a serious challenge, especially in the transportation sector. Testing on a live platform can be hugely expensive and lacks any chance of repeatability. For these reasons, simulation is critical. In addition, representative models must take into account the impact of the environment and the dynamics of the vehicle frame (where sensors are installed) to achieve the requisite realism.
My company, Spirent Federal, has spent the past 20 years building sophisticated and robust test solutions so that sensor-fusion systems can be fully tested and characterized. Thorough testing increases performance and reliability in safety- and mission-critical applications.
Specifically, our GSS7000 and GSS9000 GNSS simulators deliver the precision and fidelity needed for high-performance applications, while our inertial emulation platforms incorporate the key industry models of both inertial measurement units (IMUs) and embedded GPS/inertial (EGIs) for dynamic integrated testing in the lab.
We work closely with major defense contractors, such as Northrop Grumman and Honeywell, to provide robust test solutions as well as alternative RF PNT simulation capabilities.
In addition, hardware-in-the-loop incorporation with ultra-low latency, modeling signal propagation in a 3D environment — and the ability to “shift left” with software-only testing — are what helps to make Spirent Federal the trusted partner in sensor fusion development.
Chris Hogstrom is an engineer with Spirent Federal Systems.
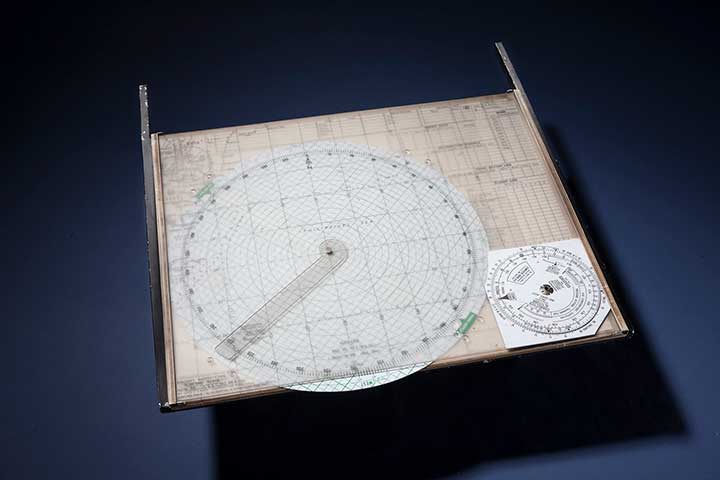
The Mark 3 Plotting Board was used in single-seat aircraft flying in the Pacific. (Photo: National Air and Space Museum, Smithsonian Institution)
On June 25, 1945, in the last few months of World War II, troops from around the globe were headed home and navigation technology was in its infancy.
On that date, the first organization meeting of the Institute of Navigation (ION) took place on the Los Angeles Campus of the University of California with 55 people in attendance. A temporary organization was established to carry on until the fall, when a second general meeting would take place on the east coast.
The first ION Annual Meeting was held Oct. 25–26 that same year at the Hotel New Yorker, with 95 ION members and 35 non-members attending. Proposed Articles of Incorporation were adopted and a council was elected.
By late October, two organizational meetings, two regional meetings and the annual meeting had taken place; bylaws were adopted with plans for incorporation; a permanent organization was established; a National Office was set up at UCLA; and plans were made for future meetings and publication of a journal.
ION’s global impact is documented in more than 2,600 technical papers published in Navigation, the Journal of the Institute of Navigation, first published in March 1946.
On June 25, ION wrote to its members, “Thank you to the thousands of ION members who have committed themselves to our field; and thank you for 75 years of technological advancements that have helped us all discover where we are, where we are going, and when we will get there.”
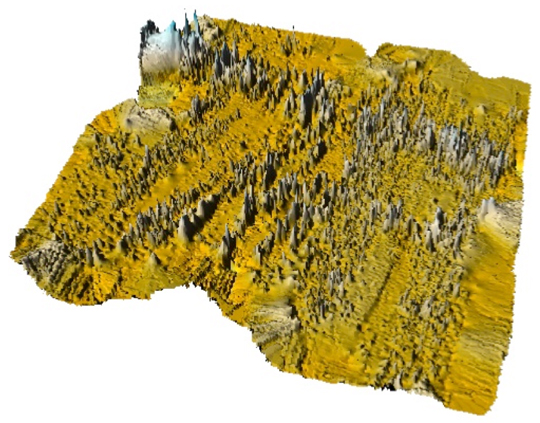
Earlier this year, a drone pilot and two data scientists from PrecisionHawk traveled to the Philippines for a unique mission — to fly drones equipped with lidar sensors over a dense rainforest to map ancient trade paths. The aim was to find buried treasure left by the Japanese during World War II.
PrecisionHawk was approached by the producers of a new History Channel show to help them navigate the Filipino rainforests. Through the combination of air and ground sensors, including a DJI M600 UAV equipped with a Riegl miniVUX lidar sensor and a Sony a6000 camera, PrecisionHawk staff produced a colorized 3D map of the forest.
The History Channel aired the series premiere of “Lost Gold of World War II” on March 19, 2019; all eight episodes are now available for streaming. The second episode features visuals generated by PrecisionHawk, as well as interviews with the drone pilot and data scientists.
A team deployed ground-penetrating radar mounted on drones, showing that the technology can search and locate targets buried deep in glacial ice.
On July 15, 1942, six P-38 Lightning fighter aircraft and two B-17 Flying Fortress bombers encountered a blizzard while supporting the Allied war effort in the British Isles.
The aircraft were forced to conduct an emergency landing on the glaciers of Greenland, and though all the crew members were rescued nine days later, the aircraft were left behind.
After using radar to find areas of interest in 2011, an expedition led by the non-profit Arctic Hot Point Solutions returned to Greenland.
Ground-penetrating radar was integrated with a drone for the survey mission in Greenland. (Photo: Arctic Hotpoint Solutions)
This time, the team deployed ground-penetrating radar mounted on drones, and showed that the technology can search and locate targets buried deep in glacial ice. Aerial surveying was more effective and less risky than working on the ice.
The team extracted hydraulic fluid from 340 feet below the surface, leading to the identification of the buried aircraft as the P-38 Echo piloted by Robert Wilson.
Six undiscovered aircraft — also part of the “Lost Squadron” — remain entombed in shifting glaciers, along with many additional WWII aircraft that went down over of Greenland as they flew between the United States and the European theater.
A future expedition will attempt to excavate Echo, and locate other aircraft of the Lost Squadron.
Featuring an exclusive interview with Astronaut Scott Kelly from aboard the International Space Station
This month, we discuss sailplanes of all sorts and conduct a brief on-orbit interview with Astronaut Scott Kelly concerning his time piloting the space shuttle — actually a supersonic glider. We touch on the role GPS played in making it a safer rocket glider. Kelly also gives us an update on his time aboard the International Space Station (ISS), nine months and counting.
When you think of gliders — or more accurately sailplanes — you probably think of long flexible wings, slow flight, bubble canopies, pristine white aircraft gleaming in the sunlight and tow requirements. For most aviators, the holiday picture of the beautiful Schleicher Model 32 sailplane below typically comes to mind.
AS (Schleicher) Model 32. (Courtesy of AS GMBH)
However, there are certainly some World War II combat glider pilots living today, heroes all, although unfortunately fewer and fewer everyday, that think of gliders in a very different way. They think of and remember huge green, tan and camouflaged wooden and cloth flying machines that carried 10 or more troops, who — if they lived through the experience — were able to wear glider rather than paratroop badges.
Army General William C. Westmoreland said of the heroic combat glider aviators, “Every landing was a genuine do-or-die situation . . . it was their awesome responsibility to repeatedly risk their lives by landing in unfamiliar fields deep within enemy-held territory, often in total darkness. They were the only aviators during World War II who had no motors, no parachutes, and no second chances.”
Graphic: Glider Pilot’s Wings from WWII.
Graphic: Glider Infantry Badge WWII.
The venerable wooden and cloth combat gliders of World War II were about as far removed from soaring sailplanes as a glider can be. Once released, they glided or, more accurately, careened to Earth. They were versatile and rugged enough to carry combat vehicles behind enemy lines and land in rugged terrain. but they most certainly did not soar.
The courageous flight crews did not have the luxury of GPS. Navigating for the short time after the tow vehicle — typically a transport, cargo (C-24) or bomber aircraft (like the B-24) — dropped them off at altitude, almost always below 10,000 feet, was a very hit or miss affair. There were only four very basic flight instruments on the glider’s rudimentary control panel, which most of the pilots completely mistrusted and ignored.
Glider flying in World War II was strictly VFR, or visual flight rules. Veteran glider pilots tell me that finding your landing zone (notice I did not say runway) was frequently haphazard. Often they had to make do with any decent-sized farmer’s field as a landing zone. Frequently, these landing were made in broad daylight, behind enemy lines, amid a hail of bullets, so they were fraught with danger in many ways, including not knowing their exact location when they finally landed. Glider infantrymen and glider pilot casualties reached 40 percent for some missions. What would they have given for a GPS?
The venerable WACO gliders were the most common versions. By war’s end, more than 13,900 CG-4A gliders had rolled off the production lines of several companies mass producing the same design for approximately $15,000 per copy — although one company charged as much as $50,000 per unit. It is estimated that less than one tenth of 1 percent of the gliders survived to fly after conflict ceased in 1945.
According to the Silver Wings National World War II Glider Pilots Association, “Over 6,000 individuals were trained as combat glider pilots and earned their silver wings with MOS (military operational specialty) 1026. Approximately 150 glider pilots and Troop Carrier Veterans still participate in the group’s activities, although their numbers are declining with ages in the 89- to 96-year group.
Author Michael MacRae, writing on the ASME (American Society of Mechanical Engineers) webpage in an article titled “The Flying Coffins of WWII,” describes the WACO CG-4A as America’s first stealth aircraft, but also as an aircraft expendable by design: “The CG-4A fuselage was 48 feet long and constructed of steel tubing and canvas skin. Its honeycombed plywood floor could support more than 4,000 pounds, approximately the glider’s own empty weight. It could carry two pilots and up to 13 troops, or a combination of heavy equipment and small crews to operate it. The nose section could swing up to create a 5 x 6-foot cargo door for Jeeps, 75-mm howitzers, or similarly sized vehicle. With a wingspan of 83.5 feet, the Waco maxed out at 150 mph when connected to its tow plane. Once the 300-foot length of 1-inch nylon rope was cut, typical gliding speed was 72 mph.”
Gliders first appeared in U.S. combat operations in the 1943 invasion of Sicily. They flew on D-Day into Normandy, June 6, 1944, and in other important airborne operations in Europe such as Operation Market Garden, the Battle of the Bulge, and crossing the Rhine, as well as in the China-Burma-India Theater.
After World War II, the gliders participated in U.S. military exercises in 1949, but glider operations were deleted from the U.S. Army’s capabilities on Jan. 1, 1953. Today, only special forces use gliders for silent, small-scale insertion.
Sailplanes
In contrast, a modern-day open competition glider built by the world-famous Alexander Schleicher (AS) company, for example, can soar to more than 50,000 feet with a supplemental oxygen supply, cruise at 280 kph or 170+ mph with a glide ratio of up to 80:1, with flight durations lasting more than 50 hours. Most modern sailplanes today fully incorporate GPS into their avionics suite that rivals any powered aircraft cockpit.
Contrast this with the World War II combat gliders that careened Earthward with somewhere between a 16 to 30:1 glide ratio at 70+ mph on a trajectory that typically lasted 10-15 minutes max. Sad to say, most of the operational versus training flights during World War II were one-time affairs and one-way trips, but they delivered the goods, including some very expensive firewood once the gliders were abandoned. Certainly, the WACO CG-4A glider was the last of its genre. Mothballed at war’s end, fewer than a dozen restored gliders exist today.
Rocket Gliders
Now to the heart of the matter. Gliders have evolved in ways that are difficult to imagine. Many of the aircraft that have broken world altitude and speed records are actually gliders, although we don’t typically think of them as being among that genre.
Messerschmitt Me 163B at the National Museum of the United States Air Force. (U.S. Air Force photo)
Typically a rocket-powered glider consumes fuel at a rapid rate, so most glide in for a landing. Examples include the German Messerschmitt Me 163 rocket-powered interceptor seen above, as well as the American series of research aircraft starting with the Bell X-1, which first flew and glided in for an unpowered landing in 1946. Examples of the type include the North American X-15, which spent much more time flying unpowered than under power.
In the 1960s, research and development or test vehicles now known as unpowered lifting bodies such as the X-20 Dyna-Soar space project vehicle were all the rage, and even though the X20 was eventually cancelled, the R&D led directly to the development of the U.S. space shuttle.
U.S. space shuttles: The world’s highest flying and fastest manned gliders
NASA’s now-famous and retired space shuttle first flew on April 12, 1981. The shuttle, which was a powered rocket during liftoff and cruise, re-entered as the fastest glider known to man at Mach 25 at the end of each spaceflight, landing entirely as an unpowered glider that, ironically, created its own sonic boom when it re-entered the atmosphere.
The U.S. space shuttle and its Soviet equivalent, the seldom-seen Buran shuttle, were by far the fastest aircraft ever to fly and, by a wide margin, the fastest gliders ever to fly in space and in the atmosphere.
NASA astronaut Scott Kelly floats aboard the International Space Station after the hatch opening of the Soyuz spacecraft Mar. 28, 2015. (Photo: NASA)
One of the more well known space shuttle command pilots is Commander Scott Kelly, who as I write this is well into his ninth month aboard the International Space Station (ISS). He has three more long months to go before he returns home to a hero’s welcome and a battery of medical tests to determine how longevity in space affects the human body by comparing him to his astronaut twin who remained Earth-side during the same 12-month period. You know Einstein’s general theory of relativity, divided by telomere length and all sorts of quantum mechanics and medical technology. Talk about being poked and prodded.
Scott Joseph Kelly (born Feb. 21, 1964) is an American astronaut, engineer and a retired U.S. Navy Captain. A veteran of three previous missions, Kelly was selected in November 2012 for a special year-long mission to the International Space Station, which began in March 2015.
Scott Kelly is interesting for one more record he created during his time as a shuttle commander and shuttle command pilot. He flew the first-ever space shuttle GPS approach on Aug. 21, 2007, on STS-118. When I first heard about this feat, I thought it would be interesting to talk with Scott about it, and I made plans to do so upon his return from the ISS in March 2016.
However, through the marvels of instant messaging and the good graces of my friend Joe Rolli at Harris Corporation (nee Exelis, nee ITT) I was put in touch with Scott Kelly.
We conducted our brief interview electronically with nary a glitch even though Scott is hurtling around the Earth in low Earth orbit at a speed of approximately 17,150 miles per hour (about 5 miles per second). This means that as Scott orbits the Earth, he experiences a sunrise once every 92 minutes for a total of 5,634 sunrise events during his year on orbit.
Relatively, however, compared with the speed of electrons or light, which travel at 670,616,629.4 mph in the vacuum of space, Scott and I — who are traveling at a differential of 17 orders of magnitude compared to electrons — are essentially standing still. So the seemingly huge speed differentials makes little or no difference. Again Einstein, Newton, Schroedinger and probably his cat, if alive, would beg to differ on a technicality, but for our intents and purposes, I stick by my statement.
Here’s how that interview went. I want to publicly thank Scott for taking the time out of an incredibly busy schedule to talk with us about the importance of GPS and the space shuttle. Scott currently serves as Commander of the ISS on the one-year mission. In October 2015, he set the record for the total amount of days spent in space by an American astronaut — 382. As this article goes to press, Scott has spent more than 445 days in space.
NASA astronaut Scott Kelly has been aboard the International Space Station since March as part of an endurance mission to test the effects of long-term exposure to space. In this July 12, 2015, photo he poses for a selfie in the “Cupola” of the ISS. (Photo: NASA)
(Don: Don Jewell, GPS World Defense Editor; Scott: Astronaut Scott Kelly)
Don: Scott, thanks for taking the time out of your busy schedule for our questions concerning GPS and the first space shuttle approach made using that technology, which you flew several years ago now.
Scott: This was eight years ago and I don’t have notes here, so this is my best quick effort.
Don: Why did NASA decide to approve GPS approaches for the space shuttle, and why were you chosen to fly the first one? I would assume that your experience, safety, approach options and flexibility would play a part here.
Scott: TACAN was going away. I wasn’t assigned to STS-118 because of this. This was a secondary DTO or Developmental Test Objective.
Don: Was a GPS approach after that first landing always an option?
Scott: GPS approach is kind of a misnomer. We incorporated GPS into the navigation state [for the space shuttle] from about Mach 5 [five times the speed of sound] until we transitioned to a microwave landing system on final.
Don: Were the certified and validated GPS approaches unique, or did they mimic current approaches such as ILS or VOR/DME?
Scott: Actually, Don, they have little to do with the GPS approaches aircraft fly.
Don: Were there both precision and non-precision GPS approaches? Do you remember the approach speeds and critical points in the approach? Can you discuss them? Since some of the alternates around the globe are in fairly primitive locations, did GPS make them more accessible and actually provide more alternates?
Scott: Again, GPS was used to update our navigation state. On an approach to a runway without an MLS (Microwave Landing System), GPS would have been our primary navigation source to the ground, but its not like we would be looking at an approach plate.
Don: What were the minimums for a GPS approach, before you could start a descent profile for a GPS (aided) approach and landing?
Scott: Actually, Don, our weather minimums were pretty restricted before we could start the de-orbit burn [while still in orbit]. Ceilings of 5,000 feet I think.
Don: At what point in your descent profile were you or NASA required to make a decision about your landing location and alternates? And, related to that, was there a typical point during the descent profile where you were committed to a landing location and could not choose an alternate? How far was that from your landing site nominally?
Scott: Legally you could re-designate after the de-orbit burn to an alternate [landing] site, but this would be in a very critical situation and was never done. Basically, when we did the de-orbit burn, we were essentially committed to landing at the chosen airfield.
Don: In an emergency, were you able or authorized to land at an alternate that did not have an advance NASA team in place, and were you able to fly the space shuttle totally manually or were computers always involved for stability?
Scott: Yes, and computers were always involved.
Don: Many modern fighters are inherently unstable. When the last computer fails, ejection is the only option. How did this apply to the space shuttle?
Scott: We were [essentially] fly by wire…the shuttle can’t fly without at least the backup flight control system (FCS) computer. Nominally, we have four FCS computers online.
Don: Since aerodynamically you were essentially flying the world’s fastest and highest flying glider, at what point were you committed to a landing site? What discretion as the Pilot in Command did you have, or was it all up to NASA headquarters?
Scott: When you did the de-orbit burn, you were committed to a landing attempt somewhere. If you had communications with the Mission Control Center (MCC), they decided where you would land. [With] no communications, it is up to the commander in an emergency.
Don: The space shuttle exceeded the speed of sound by a factor of 25 in the Earth’s atmosphere (Mach 25) on approach. What were the handling characteristics when this occurred? While there was obviously a sonic boom, where there any handling anomalies that required manual inputs from the pilot in command?
Scott: There was a little buffeting — sort of like running off the road in a pickup truck.
Don: Speaking of alternates, if your landing gear failed to deploy, or you had an indication that there was a gear malfunction, where you able to land on alternate surfaces such as grass or sand? Most importantly, in your opinion, would the shuttle and crew have survived a water (ocean or lake) landing? And were these alternate landing sites planned for or simulated to any high degree of fidelity?
Scott: The simple answer is you would try and bailout, but of course crash, if you had no choice.
Don: Finally, your comments. What was it like to pilot the space shuttle, and what did having a GPS approach available mean to you?
Scott: It was a privilege. GPS allowed us to continue to fly the space shuttle as legacy systems like TACAN were retired.
Don: Thank you so much for your time. If you have some comments concerning your current one-year experiment aboard the ISS, that would be great.
Scott: Sure, Don. I am currently a little over 270 days into my one-year flight aboard the ISS and going strong. Plus, to bring this all back to GPS, I can definitely say that GPS is working well on the International Space Station. We also have a Garmin GPS in the Soyuz, which we would break out in an emergency situation, and use a handheld satellite phone if we had an off-nominal landing, to tell people where we were.
The International Space Station. (Photo: NASA)
Space Station and GPS
It is a good thing the GPS receivers on the ISS are working as well as they are. Since 2002, they have been the primary means for determining attitude, position, speed and universal coordinated time reference on the ISS. The GPS position of the ISS, which moves at five miles per second, is accurate to within 10 meters and is updated continuously.
Previously, according to NASA, the station’s position was determined using ground tracking and other techniques. That information was considered to be adequate if not overly accurate, as it was updated just once a day. Just before an update, the actual and propagated position of the station, the ephemeris, could differ by as much as 10,000 meters.
Specifically, the ISS uses the GPS position and velocity solution as the ISS navigation state. The ISS’s attitude determination filter combines the GPS receiver attitude information with ring laser gyro data available from the ISS rate gyro assembly (RGA) to produce the ISS attitude solution.
Today, continuous accurate knowledge of the space station’s location also keeps it safely out of the path of wayward space debris.
So now you know something about sailplanes, combat gliders, the U.S. space shuttle, the ISS, Astronaut Scott Kelly and how they are all affected by GPS. Even more importantly, I hope this column reinforces for you the ubiquity of the Global Positioning System.
GPS is the world’s time keeper and primary global time distribution system. GPS time synchronizes networks, computers, communications and any number of other devices, from Apple iWatches to undersea navigation, to systems used by private pilots, airlines, spacecraft and astronauts in deep space. You name it: If it uses time, chances are GPS time is the provider, with an incredible stability of 1E-14.
Indeed, you should think of GPS as an enabler. It enables so much of our technology today that it would be difficult to imagine living without it. Contrary to popular belief, even in the U.S. government, GPS is robust and reliable and becoming more so every day. Just think about it: GPS tells us when and where we are, how to get where we are going, and whether or not we are late. An amazing system, brought to you free of charge by the United States Air Force.
A U.S. Army camp near Townsville’s suburban areas, circa 1944.
By Tracy Cozzens
Beneath the surface of a tropical paradise in the city of Townsville on Australia’s Sunshine Coast lies a hidden maze of tunnels and underground bunkers, once said to be used by General Douglas MacArthur. Learning the secrets of this labyrinth that was a major World War II staging point for battles in the Southwest Pacific is the passion of Kevin Parkes of Geo Positioning Services, Townsville.
Parkes’ main tool is historic aerial photography, coupled with hours of research in the National Australian Archives and the National Library of Australia. To that he adds geophysical surveys of the infrastructure. Parkes is undertaking the geophysical surveying and mapping using an Ashtech ProMark 100 GNSS receiver and a Willy Bayot PPM Mk 3 magnetometer. He used the magnetometer and GPS receiver in parallel, later processing both data sets.
After the attack on Pearl Harbor and the Japanese advance through Asia, Townsville’s population bloomed from 30,000 to 120,000 by mid-1943. The rapid military influx stretched resources to the breaking point.
The U.S. Army 5th Air Force established the largest aircraft repair and maintenance facility ever built in the southern hemisphere at Townsville, and the site became the technical hub of U.S. military aviation. Air Force Service Command Depot #2 at Townsville was capable of overhauling 300 aircraft engines per month and performed aircraft assemblies, modifications, overhauls, and maintenance. Major resources and facilities serviced the Royal Australian Air Force, Australian and U.S. Armies, Royal Netherlands Air Force, Royal Air Force, Canadian forces, Royal Navy, and other allied forces.
“A visitor to Townsville today would be forgiven in asking where the artifacts of this massive military facility are today,” Parkes said. “There is very little remaining in any built structures that give any idea of what happened in this city 70 years ago.”
Parkes realized that underground cave shelters were most likely used for warehousing and storage, to keep stores out of the weather and protected from enemy action.
He describes one area he investigated, a park in Townsville used as an officer’s accommodation camp. Preliminary magnetic anomaly surveys indicated linear anomalies were beneath the park surface. A high-resolution survey gave samples of about 1.5-meter resolution.
“The difficulty was reducing all noise levels down to a minimum, including the X/Y positioning, so the GPS requirements came down to survey quality,” Parkes said. “It is absolutely critical that the GNSS receiver and magnetometer keep in synchronization during data collecting runs including under the frequently encountered tree canopies.”
To improve accuracy, Parkes avoids using real-time kinematic survey equipment. “That would involve having another electronic device operating and emitting more noise in the signal spectrum,” he said. The need to position the GPS antenna in close proximity to the magnetometer sensor was a major issue with all on-pole RTK systems.
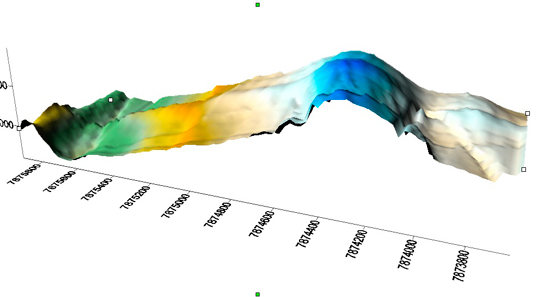
A U.S. Army air raid shelter under the officer’s accommodation camp, mapped with GPS and magnetometer data and using Surfer 3D surface mapping software.
With an Ashtech Promark 3, post-processed results were better than 100-millimeter X/Y coordinates. “The unit is lightweight and self-contained,” Parkes said. “The noise from the Ashtech survey-grade external antenna’s effect on the magnetometer data was insignificant.”
Still, this park had a grove of trees that defied every attempt to maintain GPS reception and consequently synchronize the magnetometer. Along came the Ashtech ProMark 100, a lightweight and self-contained receiver with external geodetic antenna with GPS and GLONASS. “My first attempt at surveying under the trees was spectacular to say the least,” Parkes said. “Synchronization with the magnetometer data was near perfect.”
The dual-constellation reception of the ProMark 100 became essential to the success of Parkes’ work. After more than a hundred data-collection passes with the magnetometer and ProMark 100 through the groves of trees, at no time did the Position Dilution of Precision (PDOP) rise to more than three, and at all times more than eight satellites were available. The ProMark 100 data is post-processed to improve accuracy. Parkes noted that ironically many of the most interesting finds have been collected under heavy tree canopy. Without the quality of the geographic positions enabled by the ProMark100 under tree canopy, Parkes said that much of his work would have been impossible to achieve.
Parkes’ surveying equipment includes a magnetometer and a ProMark 100 GNSS receiver.
In fact, when Parkes first began his mapping project in 2005, he used a single-constellation GPS system and post processed the results against the local International GNSS Service (IGS) reference station. The GPS-only system worked very well until a grove of trees would interfere with the sky. Now with the ProMark 100 GNSS receiver, Parkes surveys using GPS L1 and GLONASS in continuous kinematic mode at a one-second collection rate. He then post processes the data against another ProMark 100 used as a local reference station.
To date, Parkes has mapped an underground railway, artillery observation posts, several shelters, fuel terminals and other yet-to-be-identified pieces of the vast infrastructure.
During his Research, Parkes mapped a major magnetic anomaly in Cleveland Bay. In 1770 Captain James Cook in the HMS Endeavour mapped the east Australian coast. Venturing into Cleveland bay, Cook noticed his compass behaving erratically, and named one island Magnetic Island. Today, a 3D surface model reveals a large magnetic anomaly heading across Cleveland Bay and straight towards Magnetic Island, 7 kilometers from Townsville. Experts who have examined the data believe that it is a naturally occurring magnetic anomaly about 800 meters wide. “It would appear that Captain James Cook was indeed a very capable navigator and cartographer,” Parkes said.