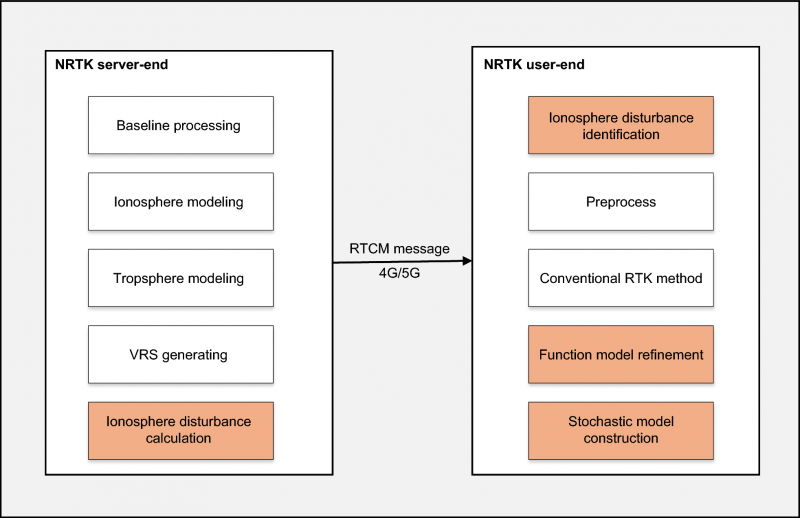
For users relying on centimeter-level accuracy — such as surveyors, engineers and autonomous systems — ionospheric disturbances can mean system downtime and significant losses. Traditional network real-time kinematic (NRTK) positioning methods assume smooth ionospheric conditions and thus fail during active solar periods.
To meet these challenges, a research team from Wuhan University and Guangzhou Hi-Target Navigation Tech Co. Ltd. developed an NRTK positioning model capable of maintaining centimeter-level accuracy under intense ionospheric disturbances.
This approach could serve as the foundation for next-generation, self-correcting navigation systems that operate reliably under any atmospheric condition.
The study (DOI: 10.1186/s43020-025-00179-4), published in Satellite Navigation on Oct. 6, introduces a dual-optimization framework that integrates real-time ionospheric indices with adaptive functional and stochastic models. By learning from disturbance patterns and automatically recalibrating user-side algorithms, the system dramatically enhances GNSS reliability during the ongoing solar cycle peak — offering a key safeguard for positioning technologies in low-latitude regions most vulnerable to ionospheric turbulence.
The innovation centers on leveraging the rate of the total electron content index (ROTI), a key indicator of ionospheric activity, to dynamically adjust both ionospheric residual estimation and observation weighting. When the system detects disturbances, it automatically reduces the influence of affected satellites and refines error models in real time.
Using data from Hong Kong’s Continuously Operating Reference Station (CORS) network — one of Asia’s most active low-latitude regions — the researchers found that ROTI showed a strong positive correlation (0.91) with ionospheric interpolation errors and a negative correlation (–0.9) with signal-fixing rates.
Compared to conventional NRTK methods, their adaptive “Method B” improved horizontal and vertical positioning accuracy by 37.6% and 41.6%, respectively. Moreover, it achieved a stable 84% average fixing rate, even during equinoctial months when ionospheric scintillation is strongest. The results reveal not just a technical upgrade but a practical solution for real-time navigation across regions frequently affected by solar-induced ionospheric noise.
“Our method essentially teaches GNSS systems to think smarter under stress,” said Xiaodong Ren, senior researcher at Wuhan University and lead author of the study. “By allowing the model to ‘sense’ and adapt to space-weather disturbances in real time, we’ve moved beyond static correction systems toward intelligent positioning. This is crucial not only for maintaining accuracy but also for ensuring resilience as solar activity intensifies.”
He added that this approach could serve as the foundation for next-generation, self-correcting navigation systems that operate reliably under any atmospheric condition.
This adaptive NRTK framework marks a significant leap forward for industries that depend on precise, real-time location data — from autonomous driving and drone surveying to precision agriculture and infrastructure monitoring, Ren said. By integrating live ionospheric monitoring into everyday positioning workflows, it ensures continuous accuracy even when solar storms strike.
Future developments may combine the model with artificial intelligence and multi-constellation GNSS networks to further enhance forecasting and resilience. As Earth moves through one of its most active solar cycles, Ren said, such innovations will be essential to keeping navigation, communication and automation systems firmly on course.