Interview with Sara Masterson, Director, Positioning Services, Hexagon’s Autonomy & Positioning division, Hexagon | NovAtel
The accuracy of GNSS receivers continues to increase thanks to new satellites and signals, improved antennas, etc. How is that changing the role of correction services?
For sure, the accuracy of GNSS receivers and antennas is improving. However, most applications still require a higher level of accuracy than what is available from an uncorrected position even with the positioning improvements brought by new constellations and signals. GNSS corrections are still required to enable, say, lane-level accuracy, or sidewalk-block accuracy for autonomous driving or mobile phone applications and for off-road autonomy applications such as construction, mining, agriculture — these all still require centimeter-level accuracy that is enabled through GNSS correction services.
Corrections also help by improving the availability and reliability of a solution. In the future, corrections will play a key role in adding integrity to enable functionally safe solutions that are required for new applications, such as autonomous driving.
There are many options for corrections — local, regional and global, ground-based and satellite-based, public and private, etc. Which of them are generally best for which applications and conditions?
That depends very much on the user and the application. There are many new correction services in the market. Some are free, some are commercial services. Even now we see in agriculture that WAAS is sufficient for some broadacre-type applications. So, we will continue to see a range of applications, some of which will be satisfied with the level of performance from a free service and others that will be looking for the better performance and service level guarantees that come with commercial services.
If something is not working when you are using a free service, there’s no one to call. With commercial services, you get responsive customer support and you pay for higher levels of performance and service availability. In many applications, especially those that involve autonomy or safety applications, you cannot afford to have downtime, or your machine just stops working, which costs money. So, many applications are still going to be needing the performance and service level guarantee that commercial services offer.
How does TerraStar fit into this range of options? What industries and applications are you targeting?
TerraStar has a range of services that enable us to target many industries and applications. Agriculture, of course, is one of the key applications for our services and we have customers using TerraStar for mobile mapping, UAVs and new autonomy-based applications. We are also involved with some interesting Hexagon joint projects that use TerraStar corrections for mine train automation and surveying and construction.
Our entry-level TerraStar-L service is still better in performance to many of the free services or to an SBAS-type service in terms of accuracy, but it is available globally, including regions where you don’t have other options. It also provides better pass-to-pass and year-over-year repeatability, as well as very quick reconvergence time if there are any issues with GNSS outages.
Our flagship offering is the TerraStar-C PRO service. That’s where we just introduced the “RTK from The Sky” technology, bringing the performance down to converging to two and a half centimeters in three minutes. That, too, is available globally which makes it a real game changer for customers in many different applications, because they can start to look at that service as an alternative to RTK and without the added connectivity logistics that an RTK solution brings.
Our RTK assist solutions are good augmentation solutions for customers who still primarily need RTK but experience some RTK correction outages – RTK ASSIST bridges through those outages. So, we have a wide range of service offerings in the portfolio that can address the positioning needs of many applications.
Photo: Hexagon | NovAtel
Will the reasons for having a base and rover setup decrease sharply?
Use of base and rover setups is already decreasing and being replaced by both PPP and network RTK solutions. There are applications where RTK still makes sense, such as those that have very tight vertical requirements and many survey applications. Another Hexagon division, Hexagon’s Geosystems division, incorporates TerraStar correction data into their new SmartNet Global offering as a seamless service that provides both SmartNet RTK plus TerraStar for either bridging outages or independent PPP operation, depending on the project’s location and whether they’re within range of SmartNet coverage.
There will be many applications that continue to benefit from a combination of the two technologies. However, as the PPP services, like TerraStar, continue to improve by reducing convergence time and providing highly reliable solutions, users in those applications can be confident that the standalone PPP solutions meet their performance needs and bring many additional benefits such as consistent, global coverage and performance.
Is TerraStar completely receiver agnostic?
TerraStar is currently only compatible with NovAtel’s GNSS hardware. Going forward, through the work that I referenced with autonomous driving and mass-market applications, we will be providing TerraStar services in industry-standard formats, depending on the inter-operability requirements coming from those applications. We expect that there will be demand for dual sourcing of corrections and interoperability between chipsets that are used in vehicles, for example. For those applications, we will be developing TerraStar services that are compatible with hardware from other GNSS manufacturers.
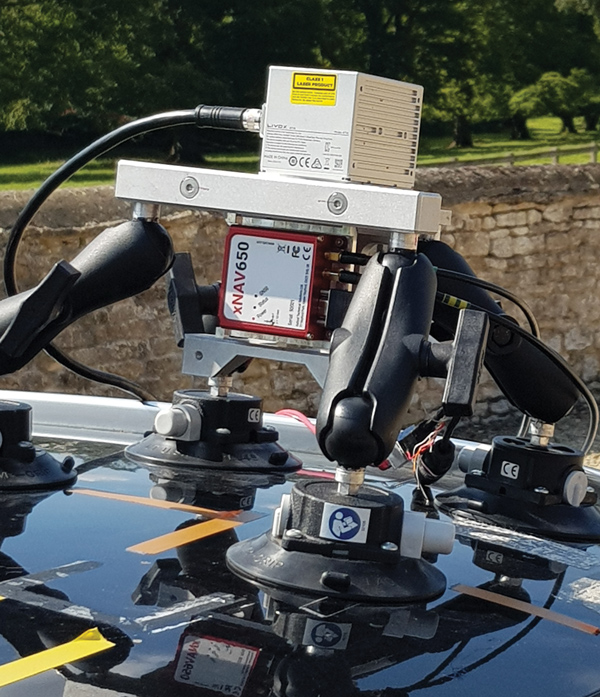
Mobile mapping using an OxTS xNAV650 INS and lidar sensor. Photo: OxTS
We discussed mobile mapping with Jacob Amacker, application engineer, OxTS.
How do you define “mobile mapping” as opposed to “surveying”?
We use the two terms interchangeably. Each one has a different connotation depending on where you are in the world and both can be useful. We use them to cover a broad range of use cases, but “mobile mapping” is used more specifically for land-based mapping of the environment. A typical application might be a van equipped with an INS [inertial navigation system] and lidar sensors.
“Surveying” can be used a bit more generally, applying to aerial or pedestrian-based mapping, but it does have the connotation of static mapping, which we do not typically handle.
What are your main markets for mobile mapping?
It is very hard to say. The world of mobile mapping is so diverse. However, lidar mapping could be seen as both the largest and the fastest-growing market in the surveying world as lidar has become widely affordable. Although our technology can be used with any surveying devices, at OxTS we particularly like to use lidar and are focusing on getting the best results from lidar data. This has included making our own point-cloud georeferencing software to maximize the potential of our navigation data in making point clouds.
What are the main differences between your devices for aerial mapping and for ground-based mapping?
We use the same INS device for both ground and aerial mapping. For use on manned aircraft, we would always recommend our highest accuracy system with the best IMU, the Survey+. The main source of inaccuracy in survey data will come from the IMU error over the range to the objects. Because most of this range is the aircraft’s altitude, this error is quite significant. For land-based mapping work, the measurements provided by the lighter and smaller xNAV650 are still suitable for many high-precision applications.
GNSS-INS integration has been done for decades. What is new and what are the remaining challenges?
It is now much more affordable to have very high-grade IMUs and GNSS receivers. Nevertheless, there will always be further improvements to be made to how the data streams are combined. On a similar note, other navigation aiding sources are increasingly being considered to supplement the IMU and the GNSS receiver — such as wheel speed sensors, lidar, camera odometry and others that can also be integrated to stabilize and improve the navigation data. Overall, it is very exciting what is yet to come out of INS technology. In recent years, it has become so good that people expect more and more from it, and this demand must be met. What happens when GNSS drops out? We are seeing increasing development to make the navigation data robust against challenges of any environment.
Given the IMU’s drift, for how long can your system function at an acceptable level in case of a GNSS outage?
It is difficult to put a number on what kind of drift is acceptable, as it depends on the application and the end-user requirements. Typically, half a meter of drift in one minute of GNSS-outage might be the goal for some of the higher-grade surveyors. Still others might only be satisfied with negligible drift.
What keeps the INS and the lidar unit synchronized during a GNSS outage?
The INS has an internal clock to keep the timing during a GNSS outage. Of course, this will not be as accurate as the atomic clocks on the satellites, but it is quite adequate to maintain survey-grade accuracy during GNSS outages. GNSS is still necessary to get the timing information in the first place, and this is a reliance that INS devices will want to remove in the future.
What are the key remaining technical challenges in UAV lidar mapping?
With continuing improvements in UAVs, lidars, GNSS receivers and other sensors, the key to unlocking more efficiency and profitability in this market will be improving and simplifying workflows and processing. The next frontier is integrating AI and machine learning with digital twin models to create forecasting tools.
UAVs are much cheaper to operate than manned aircraft per hour, but not necessarily per square mile. UAVs can cover ground that cannot be mapped from a land vehicle; however, the latter have a much greater range.
You are correct. Each type of vehicle has its area of best utilization. Once we know what the customer wants from the data being collected, we can determine the size, weight and power (SWAP) of the payload needed, and then it’s a matter of analyzing cost versus capability and working with the customer to pick the right payload for the right vehicle at the right price.
What positional accuracy do you achieve for your point clouds?
With our GNSS-receiver-based navigation unit, which also includes an IMU and key IP [intellectual property] from our company, and the right combination of tools, we achieve an accuracy of 2 cm to 3 cm.
What are your key markets for UAV lidar mapping?
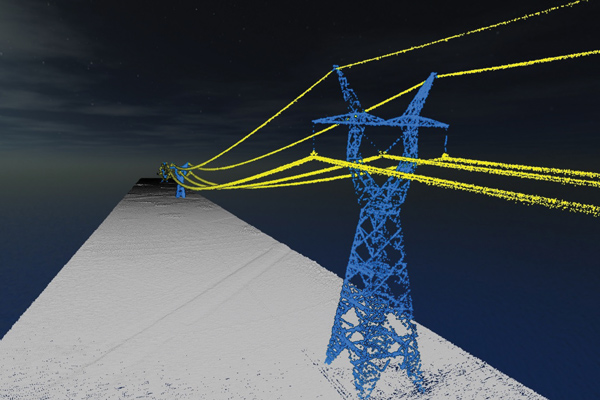
I believe it is still the Wild West in this market space. Really smart people are figuring out new ways to use these systems every day. We sell systems to teams doing high-end inspections of infrastructure, such as roads, bridges, corridors and power lines, as well as for land surveying and mining.
What was a recent application of one of your mapping systems?
One of our most recent success stories has been the launch of our Geo-ECTO-1 system. It features dual lidar sensors combined with a 360-degree FOV [field of view] camera and high-end GNSS receiver. It is ruggedized from the ground up and is meant for high-end survey and infrastructure inspection work. The payload is designed to quickly transition to a UAV-based system. Our two launch customers/partners are California-based survey companies Guida Survey and LACO Survey. It has been a great experience getting these systems up and running with our partners.
Our next adventure will be to work with UC San Diego’s Scripps Oceanographic Institute. We are proposing and demonstrating one of these systems to be used for analyzing cliff erosion on the beaches here in California, where several collapses have led to the loss of life. We want to support figuring out how to use the analyses to create a system that would give early warning of trouble spots. With these tools we can make our beaches much safer.
Business Model Enables Mass Adoption of Product with Service
In September 2021, Trimble released its DA2 GNSS receiver with Trimble Catalyst service. I asked Gareth Gibson, the company’s marketing director, Mapping & GIS Solutions, about the product and recent developments in GNSS-enabled mapping.
When I started in this business, more than 20 years ago, we used to divide GNSS receivers into three categories, broadly speaking: consumer grade, resource grade, and survey grade. Are those distinctions still useful?
The survey world and the mapping world have been coming together over the last 20 years or so. Probably Jack Dangermond was one of the first people to publicly acknowledge that. Surveying is an ancient profession whereas mapping and GIS, as an industry, has evolved much more recently. The techniques and the expectations of precision and the complexity of the workflow coming from the survey side has always been somewhat at odds with what the mapping world has been trying to achieve, so the products and the tools of these industries were quite different.
The Trimble DA2 receiver boosts the performance of the Trimble Catalyst GNSS positioning service. (Photo: DroneWorks)
However, there has been a blurring of the lines. Today, the capabilities of mapping-grade GNSS systems are no different from those that can be used in the survey industry as well. Catalyst is an example of that. However, the focus is much more on ensuring that the technology gets out of the way. Let the technology vendor take care of the hard parts, to make it work in the environments where it needs to work, and to make sure it operates with the software that allows the mapping user to focus on the job, with less complexity. We’ve reached that point where it’s difficult to distinguish the capabilities of a survey-grade receiver from those of a mapping-grade receiver. Technically, there’s very little difference.
You can think of Catalyst as renting the performance of the receiver to enable the work to get done. The convergence of technology is enabling the business model transformation, and the business model transformation is aiming to better address the needs of the user. The types of services that these tools enable, the methods with which these tools communicate with homebase and with the vendors—licensing systems, platforms and so forth—have reached a point of enabling delivery of products as a service. That is a good thing because customers are not interested in owning a product as much as they are in getting to the solution that they need.
So, the focus switches from “How do we deliver this product?” to “How do we best deliver this service and the solution?” Catalyst attempts to do that by delivering, in effect, positioning as a service. You are not buying a piece of hardware; you are purchasing the capability to generate and use high accuracy within your workflow to get your job done. That shifts the focus from upfront expense to delivering positioning as an operational cost.
What does the DA2 with Trimble Catalyst service enable that was not previously possible?
It enables the mass deployment of precise GNSS across organizations with tens or hundreds or even thousands of workers. They can now benefit from adding GNSS technology to their work where it was previously prohibitively expensive, too complicated, or simply incompatible with their workflows. Catalyst and the DA2 is enabling that through the business model, which we have employed for the technology, and through the technical capabilities of the platform, which has reached a point of being much easier to be mass adopted across organizations.
The significant change that we’ve made with the DA2 was the addition of support for Apple-based devices. The norm now is to use the phone or the tablet that you have in your pocket, as opposed to purchasing dedicated equipment, especially as it relates to the group of workers we would describe as the location-enabled workforce. These are people typically who are not trained surveyors or GIS professionals but are performing a function with an organization and location-enabled workflows. Software applications are just part of their toolkit for their day-to-day work. It does not make sense to equip these teams with very expensive and complicated equipment, but the functionality that the equipment can provide can unlock some areas of productivity that would have otherwise been inaccessible to them.
What are the remaining technical challenges to mapping for GIS and asset management applications?
The nut that we’ve cracked is enabling precision at almost any practical level, using GNSS, anywhere around the world. We continue to strive towards having access to that level of precision in any environment. There’s a limit to what can be achieved with GNSS alone. So, we start to see more and more the use of combined technologies, different data and sensor fusion. People are leveraging different parts of the technology jigsaw — what is available on their phones, what is available from external sensors, and what they can do with the raw data they are capturing, either directly within a piece of software on their mobile device or somewhere in the cloud, to make better use of the raw information that has been captured.
The second major area is the merging and connecting of workflows, not just the types of data that these organizations are capturing. Organizations are working with field teams, all that data coming together and being able to be used in a toolbox to enable different types of work to get done. In the past, things have been a lot more siloed. Now, technology is enabling us to work together in more clever ways. It is easier to share information.
“The nut we’ve cracked is enabling precision at almost any practical level, using GNSS, anywhere around the world.”
Is accuracy the only difference between surveying and mapping?
For surveyors, the primary deliverable is location. The historical basis of that industry is all about being able to capture and work with information in the most precise way possible. In the mapping world the focus is more on the information that’s being captured about that position, and its precision is just another attribute. That has helped to change our perspective on the relative importance of precision as part of the workflow and has driven us more towards trying to simplify the way that location is captured in a mapping workflow.
Our goal is to capture the most accurate position and to simplify the process for the user. We’ve tried to automate such things as the choice of correction service so that it’s a much more approachable technology and the user can focus on their area of expertise, which is the collection and designation of the mapping attributes.
What are the components of the Trimble Catalyst solution?
There are two elements to Catalyst. One is positioning as a service, enabled through a subscription. The other is the GNSS antenna. The latest generation of that is the DA2. We have made some changes to the DA2 to enable some better functionality and broader applicability. Without a high-quality antenna, there’s only so much that you can do with GNSS. Our focus with DA2 was to make the antenna component of the solution as small and lightweight as possible, but as high performance as possible. We’ve enabled that through a combination of very clever engineering.
The physical structure of the antenna is quite different from that of any other antenna that we build within Trimble. The idea to make it simpler, lighter and lower cost influenced almost every design decision that went into how that antenna is built — from how it fits and mounts with varying carrying solutions to how it is powered. In the first version of Catalyst, we had this notion of running the GNSS receiver as software inside using a computer that was freely accessible and available to every user without needing to burden the antenna itself and create a smart antenna. We said, “Well, if we can deliver GNSS by software, let’s leverage the computing power of the user’s phone or tablet.” So, we took the Catalyst GNSS receiver engine and ran it as an app on a phone.
The Trimble DA2 receiver at work. (Photo: Trimble)
There were some limitations with that approach. We needed to have a fully cabled solution between the antenna and the phone to enable the required bandwidth from the antenna to the software itself, which required a USB connection and put a fairly heavy computational burden on the phone. However, that enabled us to strip out a lot of the excess weight and complexity from the antenna design, which lowered the cost of the antenna. It was a trade-off decision.
With the DA2 we’re acknowledging those changes, plus the limitations that are imposed by wanting to be compatible with the Apple environment of devices. We can still create a very low cost and lightweight computing package to run this same engine in software, but just move that computing resource back into the antenna again. So, it’s still a software defined receiver—effectively a completely different technology from what you would find on a typical hardware receiver.
We have added a wireless radio to allow GNSS positions to be communicated back to your phone or your tablet via Bluetooth. So, DA2 is a lot more versatile because it enables iOS device usage and wireless transfer information from the antenna to the phone or tablet.
Now, how do you make that work as a package to deliver high-precision results? You need access to correction services and a definition of how you want the receiver to behave based on a business model of what consumers are charged. That’s where the subscription component of the Catalyst service comes in. With Catalyst, we want to simplify the way that customers choose what they want and how they get it.
So, rather than purchasing a specific hardware configuration, figuring out what correction services to use, and how to configure them, you simply subscribe to whatever your required performance level is, and Trimble handles the rest. Each subscription is time-based, so it could be annual, monthly, or even hourly. It is a completely managed system that works everywhere in the world.
What are the options for receiving the corrections?
The DA2 supports delivery of corrections over the internet or through the antenna itself — so, in an offline or an online environment. Catalyst uses Trimble’s dedicated correction services, so Trimble VRS Now, which is available in parts of North America and most of Western Europe, as well as Trimble RTX, which is available everywhere in the world and is also delivered by internet or by satellite L band. Globally or regionally available augmentation systems such as EGNOS and WAAS, and those smaller systems for DGPS-type positions, are also used where it’s necessary as a fallback option.
The receiver will choose what correction service it needs to use based on the user’s subscription level and the environment in which the receiver is currently operating. It knows where in the world it is and which license type the user has, so it will try to use the best available source without the user needing to really think about it. The user just specifies to which precision level they want to subscribe — such as one centimeter or 10 centimeters — and the receiver figures out the rest. Catalyst also supports those customers who have their own correction services and want to use it. In most cases, however, that’s not necessary.
Does the current version of Trimble Catalyst differ from the previous version in any other way?
With the latest generation of Catalyst you no longer need a high-end phone to run the service because we have removed the reliance on USB to deliver the data from the antenna to the controlling device. Now, you can effectively do all the computation in the antenna and use Bluetooth for data transfer, which makes it a bit more versatile. Additionally, we have introduced a handle that allows you to use the DA2 in a handheld format that also stores a battery pack.
The biggest leap was certainly the addition of iOS support. After releasing the DA1, we quickly realized that it was not addressing your needs if you were not an Android user it. In North America, more than 70% of business organizations prefer Apple to Android. So, this improvement has more than doubled our addressable customer base. It’s also for those mixed fleet organizations that did not adopt Catalyst because they did not want to have one solution for their Android users and a different one for their iOS users.
What markets and applications are you targeting with it?
We’ve been pleasantly surprised by the response to DA2 and the types of customers that we are seeing. We define our customers in four buckets. One consists of small, independent, non-geospatial businesses, which is a new area for us—the geospatially enabled workforce, people who are using applications that have a location component, who previously would not have been able to justify the purchase of dedicated and expensive equipment. In this bucket I would put landscape gardeners for example, or golf course designers or people who now can create a map much more easily and effectively.
Another consists of consultants and contractors. These are organizations small and large doing geospatial contract work. They are specialists who get sent out into the field to either do mass data collection projects or to consult and provide professional services with a geospatial bent. These are much more traditional customers; they know a little bit more about the technology and what they’re doing. For these customers, Catalyst is a new tool. It enables them to deploy GNSS more broadly across their organizations.
Then there are the sort of organizations and businesses that run their own teams and perhaps have their own GIS department and a field crew dedicated to operating and maintaining the GIS. But they also have the field operations groups, who aren’t geospatially savvy or aren’t geospatial professionals. They’re starting to deploy GNSS across their teams more effectively, as well, because Catalyst is the type of tool that you can keep in the glove box of your car and have available to use at a moment’s notice. So, utilities, municipalities, public works organizations and the like, large federal government agencies in the United States especially.
Finally, the owners of large infrastructure assets, privately owned organizations running ports or oil and gas operations. Again, this is an attractive solution for them. We’re finding that this solution will enable us to address the full range of the market much more effectively.
Hexagon | NovAtel’s CPT7 integrates a GNSS receiver and an INS to deliver up to centimeter-level accuracy. (Photo: Hexagon | NovAtel)
We discussed mobile mapping with Bryan Leedham, product manager of enclosures and post-processing software, NovAtel, Autonomy & Positioning division, Hexagon.
How do you define mobile mapping?
It is getting broader in scope, as more folks find reasons to map the world. The key goal is to capture reality from mobile platforms to build a digital representation of reality for some large area, such as a city, a road or a factory. Most of the time, that means from a ground vehicle on public roads.
It’s also safer and faster than traditional surveying because you don’t have to stop traffic or dodge it.
Right! In an ideal world, rather than spending days setting up traditional survey equipment, you could strap some sensors on a mobile platform and gather accurate map data in minutes.
What are the key remaining technical challenges?
Picture one of Google’s or Waymo’s mapping vehicles. The first sensors that come to mind are GNSS, inertial, lidar and radar. Each of those has its own unique strengths and weaknesses. The first technical challenge that remains is to mature each of those technologies for a lower enough cost that it’s affordable.
Right now, mobile-mapping vehicles are quite expensive, especially in areas where some of these sensors will struggle more than others. To map very dense urban spaces — with underground areas, overpasses and tall buildings where GPS is challenged — you need a very strong localization system that can survive those conditions for however long it takes to drive through them. If I’m building a car to map rural Alberta, I could choose much cheaper sensors than if I were trying to map downtown Chicago every week.
On the flip side, you must deal with the massive amounts of data collected.
Yes, that is a very large challenge. Lidar data, in particular, is guilty of generating very large point clouds. It’s a balancing act. More accurate and higher resolution maps require lidar sensors with even denser point clouds. So, you need data management and sufficient processing power to get accurate results quickly.
What are the key technical challenges in sensor fusion?
Sensor fusion is how we approach the goal of mapping as accurately as possible in increasingly difficult environments. On their own, GNSS receivers struggle in obstructed areas but, when you pair them with other sensors, they become very complementary.
Lidar and cameras, for example, are quite good at measuring the distance to nearby objects and at classifying them, but they have no idea where they are relative to one another. Likewise, if you let an IMU [inertial measurement unit] sit in your car, it will no longer know its location. However, once you give it a position update, it is very good at maintaining a trajectory over a short period of time. When you combine absolute and relative localization, all the sensors play to their own strengths.
What is NovAtel’s SPAN software?
It stands for synchronous position, attitude and navigation. It is the sensor-fusion software that combines the GNSS, inertial and whatever other sensors. It is based on core NovAtel GNSS receiver software. We can use NovAtel receivers in combination with IMUs from a wide range of manufacturers and, in the future, hopefully, other sensors from a variety of manufacturers as well.
SPAN started with blending just GNSS and inertial but we’re now researching how to bring in such things as lidar and cameras. Autonomous Stuff, another Hexagon company, works on the greater sensor fusion using SPAN as well.
High-resolution imagery geolocated by the sixth-generation Digital Sensor System (DSS) after Hurricane Ida. (Photo: NOAA)
Applanix, a division of Trimble, has been working with the National Oceanographic and Atmospheric Administration (NOAA) since the early 2000s to develop their response for emergency and coastal mapping activities. We discussed this collaboration with Joe Hutton, the company’s director of inertial technology, land and airborne products.
How has Applanix collaborated with NOAA regarding emergency response and coastal mapping?
Early on, we worked with them to develop a solution that allowed them to get out in the field and produce high accuracy map products with minimal touching of the data. In mid-2021, we delivered the next generation of this solution, or the DSS version six, which represents the culmination of everything learned over the years about how to produce imagery for emergency response, in terms of the types of collection, the types of imagery, and how to get it into first responders’ hands as quickly as possible.
At the heart of the system is our direct georeferencing technology. It’s a solution that allows us to assign the geographic location of every pixel of the digital imagery collected in the air. As soon as you land, you have the coordinates of every pixel, which means that you have a map that NOAA then pushes to the cloud for first responders to use in their emergency response efforts.
The collaboration consisted of Applanix working with Lead’Air to manufacture the next generation system that meets NOAA’s latest requirements. That’s what we delivered in 2021. Weeks after delivery, NOAA was called to respond to the hurricanes. They flew the new system with great success and were able to use it for their response.
What is your perspective on ground control points (GCPs) vs. direct georeferencing?
It is impossible to place GCPs in an emergency response when you cannot get on the ground. People who say they need GCPs do not really understand direct georeferencing. We’re having this debate even after 20 years of proving this technology. The NOAA system does not use GCPs and the map products are at centimeter level accuracy.
We use Trimble’s RTX technology, which enables centimeter-level GNSS positioning without base stations, which is important when the CORS or local RTN is unreliable due to a disaster. We have high accuracy inertial systems that get us the high accuracy orientation, so that we can go directly to ortho photos and ortho mosaics without running any triangulation or using GCPs in that process. That is a standard process these days. GCPs are only there for quality control if you want to deliver a final map product.
Did NOAA fly the mission with its own aircraft?
Yes, these are NOAA’s King Air or Twin Otter aircraft. The King Air aircraft is specifically outfitted for these types of emergency response and coastal mapping activities. The DSS system gets installed into the airplane and gets calibrated in terms of checking the system out for accuracy. Then it’s ready to fly the response. In the air, they collect the imagery over a flight path of interest to them. Then, it’s developed from raw imagery into JPEGs in the aircraft, and all the georeferencing data is logged with that imagery so that as soon as they land they can push a button and start to reference the JPEG imagery and push it to the cloud.
What are the components of your system?
What makes this system so unique is that it encompasses all the lessons learned over the years in terms of what NOAA needs to optimize for both their coastal mapping and their emergency response. It incorporates two pairs of color and near-infrared Phase One cameras that are configured in an oblique format with some overlap, forming a bowtie footprint on the ground.
You have 100% overlap of the color with the near-infrared and it’s on a high-performance stabilized mount that keeps everything perfectly level. The mount also has a special feature that enables the operators to rotate the cameras to go into nadir mode, mostly for traditional coastal mapping that requires stereo imagery. We were able to incorporate into a single system the requirements for both emergency response—where you want large coverage and obliqueness to look for damage—and nadir for coastal mapping.
Lead’Air built the sensor for you, on your specs, correct?
Yes, that’s correct. We’ve worked with Lead’Air for probably 20 years on flight management system (FMS) technology. They also have an amazing capability to build stabilized mounts and hardware systems. So, we decided to work together. We contracted them to implement some of their innovative hardware in this new design for us to deliver to NOAA. We contracted them to do all the manufacturing of the design and delivery to NOAA.
One of the quite innovative things that they did was to develop a new flight management capability that allows NOAA to fly ad hoc along highways or rivers, looking for damage. Traditionally, for aerial imagery you have to pre-flight plan trajectories. They designed an FMS that enables a pilot to fly a road or a river looking for damage without worrying about traditional block collections as with a more traditional FMS. So that feature further increases productivity. If you look at the most recent imagery at www.storms.ngs.noaa.gov you will see that it looks like spaghetti, not like blocks. That’s because they are following the roads and the rivers looking for specific damage.
Does the post-processing use your software?
Yes, it uses the POSPac MMS post processing software with POSPac Trimble Post-processed CenterPoint RTX correction service, allowing us to get that centimeter-level position accuracy, anywhere in the world with just an internet connection. You don’t have to worry about having a local base station—which, of course, if you’re in an emergency response situation, might not be there anyway. So, this is a very powerful way of getting global centimeter-level accuracy in real time, without having to worry about the ground-based GNSS infrastructure, that is, the local real-time network, that’s on the ground.
If you don’t have internet access, you can ship that data to the nearest place that does, right?
You could, however NOAA simply flies to wherever there is access. What takes the longest is to develop the imagery from the raw format to the JPEG format, because these are such large images. Doing that in the air saves an enormous amount of time. You have these JPEG-ready images that are compressed and can go right into the georeferencing process and make it really, really fast.
That’s a matter of computing power and smart software. What else did Lead’Air contribute?
This very efficient, fast image development process in the aircraft.
It sounds like it was a very integrated process between Applanix and Lead’Air. So, NOAA had the instrument mounted on their aircraft, their pilots did the flying, and then you processed the data?
No, NOAA’s team processes all the data. We just deliver the hardware and the software. They created the workflow software to push the data to their cloud environment.
NOAA uses this data to produce maps of the damage and highlight different situations and hazards?
Yeah. When these hurricanes go through, the first questions people have are “Where’s the damage? Are these roads passable? Did my house survive?” If you are doing response, you need to get teams in there. First, however, you need to know whether the roads are passable, so that you will not waste time going down a road that is not. So, the first thing they do is go up in the air and survey the main roads to push the imagery back, so that people can assess whether the roads are passable. Then they start to look for specific areas of damaged infrastructure, to triage where to put their resources. Then they ask “How do we manage disaster recovery?”
What lessons did you learn?
We are still learning about the power of the system, because these are Phase One 150 megapixel color cameras. It is such a powerful combination of sensors that they’re starting to look at different information they can get out of these things. They’re still learning new lessons in terms of what information can be useful for both the emergency response and the coastal mapping.
Ultimately, we’ll go to full ortho maps in the aircraft. That’s just going to be a matter of computational power. The holy grail would be to produce an orthophoto in the aircraft and radio it down to the ground in real time. Nothing prevents you from doing that now other than computational power and bandwidth. It’s not practical yet, but it will probably get there.
Do you have collaborations like the one with NOAA with any other major U.S. agencies?
We’ve worked extensively with NASA over the years. For example, we have worked with them on the ice bridge project. That is where they survey ice at both poles to measure its thickness and how global warming is affecting it. They use our system on that to do the georeferencing. We also work extensively with other branches of NOAA for their shoreline mapping from their ships. We have worked with them over the years to provide the georeferencing solution for the multibeam echo sounders to produce their nautical charts.
The May 4-5 meeting of the National Space-Based Positioning, Navigation and Timing Advisory Board focused on its mantra to “protect, toughen and augment” (PTA) GPS. The meeting included three great presentations that bear directly on the A of that mantra.
CAST
The electric grid used to be simpler: regional operators flowed power unidirectionally from stations to customers basing the load on past usage. Now, the grid is becoming a wide-area network — with regional inter-connects, multi-directional flows, and load based on real-time data and predictive analysis, requiring sensors time-synchronized within 1 microsecond from UTC. Yet, this critical infrastructure’s timing applications depend entirely on vulnerable GPS technology.
“If we can provide an authoritative, trusted synchronization source across the interconnected grid, its operators have a much better opportunity to understand the interdependencies and movement of power across their networks,” said Carter Christopher of Oak Ridge National Laboratory. He described the lab’s Center for Alternate Synchronization and Timing (CAST), which provides a redundant and resilient satellite-based service backed up by a network of terrestrial master clocks. CAST is precise, traceable and secure from jamming, spoofing, cyberattacks and physical attacks.
HARS
Attila Komjathy and Larry Romans of NASA’s Jet Propulsion Laboratory (JPL) proposed a GPS high-accuracy and resilience service (HARS) based on global differential GPS (GDGPS). It would provide corrections to GPS orbit and clock errors, and encrypted navigation data bits over the internet. It would match Galileo in accuracy, they said, pointing out that Galileo, QZSS and BeiDou provide high-accuracy services in their broadcast signals. HARS would improve the accuracy of consumer GPS receivers of 3–5 m to 1 m and help ensure that multi-constellation GNSS chips would continue to rely on GPS first.
HARS could be implemented by having commercial providers—such as Apple, Google and cellular carriers—distribute GDGPS corrections generated by JPL and supported by government partners. Private industry, Komjathy and Romans pointed out, provide service for RTK, centimeter and decimeter apps, but only governments (the U.S. Coast Guard’s DGPS service and Galileo’s HAS) provide corrections for about one-meter accuracy. Therefore, HARS would not compete with industry and would create additional opportunities for it to create value-added products.
αPNT
David Castiel and Cyrus Langroudi, of Virtual Geosatellite LLC, proposed αPNT, a virtual geostationary satellite system with elliptical orbits that would provide active PNT in a distributed architecture integrated with a blockchain. The system, they said, would be able to provide very accurate geographical position, precise timing and guidance with a minimum number of satellites on the horizon. It would rely on two-way links between transceivers and satellites to protect against jamming or spoofing.
While GPS’s success makes it a critical and ubiquitous infrastructure, its vulnerabilities require and stimulate exciting new R&D. Stay tuned.
PRECISION AGRICULTURE reduces inputs of seed, water, fertilizer, pesticides and fuel. (Photo: CHCNAV)
Precision agriculture refers to the ability of farmers to observe, measure and respond more precisely to the variability of soil and crop characteristics within and between fields by using maps of these characteristics and GNSS navigation. It enables them to reduce inputs of seed, water, fertilizer, pesticides and fuel while increasing outputs. Adoption of precision agriculture technology and practices has increased steadily over the past three decades and now covers the majority of U.S. farmland.
We asked three companies that manufacture GNSS receivers optimized for precision agriculture about their challenges and plans.
What are the key challenges for precise positioning in agriculture?
One of the main concerns is the impact of obstructions — both natural, such as tree canopy and topographies, and manmade, such as buildings, silos, etc. The mounting location of the GNSS antenna on an agricultural vehicle or implement can emphasize multipath effects and limit GNSS signal availability.
Our solution for these challenges is the use of a multi-frequency receiver. In this case, the increased number of tracked GNSS signals (from GPS, Galileo, GLONASS and BeiDou), as provided by the latest Hemisphere GNSS technology used with the A631 Smart Antenna product, allows the receiver to overcome challenging conditions to ensure a stable and robust positioning solution. For example, if a tree line blocks a part of the sky at the headland of the field, it can be compensated for with additional satellite signals available outside of the blocked area, so that guidance, automated steering and application control are not interrupted. Dust and vibrations are not an issue for us due to the rugged design of the A631 GNSS Smart Antenna. However, depending upon the radio link used, long-distance RF communications for real-time kinematic (RTK) corrections can become a limiting factor. In this case, we often propose using RTK corrections over NTRIP or considering our Atlas L-band correction service for the as an RTK-like alternative.
What is the requirement for start-up time?
Although farmers spend hours in the field during the season, the planting and harvesting windows are limited; therefore, time is critical. The requirement from farmers is to be ready to go when they start their machine. During busy times in the season, farmers often leave their equipment in the field, so startup times may only be a few minutes. We meet this requirement with our startup times for SBAS and RTK corrections and the Atlas AutoSeed feature for L-band corrections. Atlas AutoSeed allows users to suspend Atlas use for any period of time, and upon returning to their last location, the Atlas system uses AutoSeed to rapidly reconverge to a high-accuracy converged position.
What is the accuracy requirement for planting?
Especially row crop planting over what we refer to as broad acre farming requires accuracy to within a few inches, which we offer with our Atlas H10 correction service. Depending upon the farming practices used (such as controlled traffic or inter-row applications), these demands are not only for accuracy, but also for repeatability of the positioning solution.
Another area that demands high accuracy is the production of specialty crops. Per our experience, this farming practice requires sub-inch accuracy and repeatability, which we meet with our RTK solutions.
What is the difference between Atlas and Atlas Basic?
We think of Atlas Basic as a global solution comparable to the different regional offerings for SBAS corrections in terms of accuracy. This means a radius 95% pass-to-pass (R95 P2P) accuracy of around 30 cm with absolute accuracy in the submeter area. We feel that this meets the “basic” needs for all precision agriculture applications.
If a customer is looking for higher accuracies, we offer the H30 and H10 Atlas Correction Services. For comparison, Atlas H30 provides R95 P2P accuracy of 15 cm, and H10 provides R95 P2P accuracy of 4 cm.
Besides your GNSS receivers and corrections services, what hardware, software and services do you provide for precision agriculture?
We announced our new MaveriX precision agriculture solution in September 2021. It uses our recognized A631 Smart Antenna and provides a complete precision agriculture solution combined with the M7 and M10 terminals, eDriveM1 steering controller, ESi2 electric steering wheel and AC110 application controller. The MaveriX precision agriculture application software, which runs on our MaveriX terminals, is the centerpiece of the system. The first production systems are being used by customers in North America this spring.
Ling Hu, Precision Agriculture Business Development Manager
What are the key challenges for precise positioning in agriculture?
Normally in the agricultural field, the environment is harsh (mud, slopes, shocks), which requires the system to be rated IP65 and above and vibration resistant. In some areas, the signal coverage of cellular phones may be insufficient. When that is the case, a UHF modem-type communication is more commonly used with a distance constraint related to the propagation of UHF signals, strongly related to the quality of the installation of the GNSS base station (height of the UHF antenna, gain, immediate environment of the station). Our NX510 SE overcomes that issue by integrating two communication modes, 4G and UHF.
CHCNAV’S GNSS RECEIVERS can be easily switched between tractors. (Photo: CHCNav)
Is planting the application that requires the highest accuracy? What accuracy can you consistently provide?
Certainly, planting requires the highest accuracy of 2.5 cm from pass to pass. With a stable GNSS RTK correction, centimeter accuracy can be provided reliably.
What is the requirement for startup time? What do you deliver?
The startup and initialization of the system should take as little time as possible and is usually done within 1 to 2 minutes from cold start. Farmers usually start their system when they drive the tractor out of the shed and are therefore ready to work as soon as they arrive in their field. Warm start (reacquisition + RTK fixed) is more important in case of obstacles or loss of the RTK correction used by the customer, when using the auto-steering/guidance system in the field. It is typically about 10 seconds.
Besides your GNSS receivers, do you provide any additional hardware, software or services (such as support and training) for precision agriculture?
Our NX510 autopilot kit consists of a receiver, display, motor, angle sensor, camera and accessories, so users can start working immediately without purchasing additional options.
In addition to automated steering systems, CHCNAV also provides complementary solutions that allow farms to be autonomous in terms of GNSS RTK corrections. These solutions consist of GNSS base stations with an integrated or external radio modem and GNSS NTRIP stations for connection over 4G. Individual GNSS stations can be networked using our CPS Net software, which can be operated by a group of farmers, agricultural cooperatives or tractor dealers. Training and user support is provided by our network of authorized agricultural resellers to ensure the closest possible service to our users.
Wang Xiaohui, Technical Director, Antenna Department
What are the key challenges for precise positioning in agriculture?
Obtaining accurate position information in real time requires real-time kinematic (RTK) positioning. There are many ways to obtain differential data. One is to establish a reference station and broadcast differential data through short-distance communication methods. This method’s disadvantage is the high cost of stations and the limited transmission distance. Another is to broadcast RTK data through an LTE network. This is convenient, but if the LTE signal coverage is poor, RTK positioning may not be achieved. A third method is to rely on satellite-based augmentation. This is independent of ground communication equipment, but has a relatively long convergence time and may be greatly affected by signal occultation.
Agricultural machinery must work in harsh environments, such as extreme heat, severe cold and strong vibrations. Consequently, the antenna must be enclosed in a robust housing with excellent protection to guarantee long-time outdoor work.
When agricultural machinery operates near densely packed and tall trees, positioning accuracy will be significantly affected. Limits on the size and cost of antennas for agricultural machinery prevent the use of choke-ring structures. Therefore, the key to achieving high-precision positioning lies in how to receive more satellite signals and avoid multipath interference in a small antenna size.
How can the antenna help with these challenges?
Harxon’s X-Survey antenna is highly integrated and multi-functional. It embeds antennas for GNSS (GPS, GLONASS, BeiDou, Galileo, QZSS, NavIc, other regional systems and SBAS), 4G, Bluetooth/Wi-Fi 900M/2.4G radio, and other frequencies. The X-Survey enables users to choose the most appropriate way for them to acquire differential data — LTE, Wi-Fi, radio or SBAS — making high-precision positioning possible in most environments.
Harxon has designed many high-precision antennas with different structures for various application environments, including those that are waterproof and dustproof and those that can withstand very high and low temperatures and violent vibrations.
Additionally, Harxon’s antennas adopt unique cross-polarization suppression technology, with good circular polarization characteristics, providing effective suppression performance for multipath signals.
How does Harxon support TerraStar correction services?
Harxon’s TS112 PRO Smart Antenna provides reliable positioning solutions for agricultural automatic guidance. It can obtain RTK-level positioning information by receiving correction data from the embedded UHF radio or its GSM modem. Also, TS112 PRO embeds a Hexagon | NovAtel OEM GNSS module, and TerraStar multi-constellation corrections are available globally on this compatible module. TerraStar corrections are available as a termed subscription from Hexagon | NovAtel.
The largest source of error in GNSS positioning is the delay suffered by the signals as they pass through the ionosphere traveling from the satellites in orbit to receivers on or near Earth’s surface. That is because the ionosphere is full of free electrons stripped from atoms and molecules by ionization and this plasma refracts the signals, changing their speed. Normally, models compensate for this. However, geomagnetic storms wreak havoc on the free electrons in the ionosphere, making it difficult to accurately determine the signal delay.
That is why space weather matters for GNSS and for the myriad human activities that have come to depend on it.
So, here’s the good news. “On a scale of one to five, the geomagnetic storm on April 14 was a three,” Bill Murtagh told me. Murtagh is the Program Coordinator and Space Weather Forecaster at the Space Weather Prediction Center (SWPC) of the National Oceanic and Atmospheric Administration (NOAA). He was referring to the third rung of NOAA’s space weather scales, which were introduced to communicate to the public the current and future space weather conditions and their possible effects on people and systems.
NOAA has three space weather scales, one each for geomagnetic storms (G scale), solar radiation storms (S scale), and radio blackouts (R scale). The steps on the scales, ranging from “minor” to “extreme,” are analogous to those NOAA uses to classify hurricanes, tornadoes and earthquakes. They describe the environmental disturbances for each of these events and list their possible effects at each level.
Solar activity runs in 11-year cycles. A G5 event happens two or three times per cycle, and the last one was in October 2003, Murtagh told me. “I can only remember a handful of occasions over the past 20 years when ionospheric activity has significantly impacted users,” told me Gavin Schrock, PLS, manager of the Washington State Reference Network, a regional cooperative of GPS reference stations and data. According to Rick Hamilton, the GPS Information Analysis Team Lead at the U.S. Coast Guard Navigation Center, it “did not receive any reports of interference related to the geostorm” and “there was no significant increase in reports that we might attribute to geomagnetic activity.”
Now, the bad news. We are heading for a maximum in solar activity, expected to occur in 2025. The Sun is “already quite active,” Murtagh pointed out, and recently there has been an increase in the number of R1 and R2 storms. Solar coronal mass ejections (CMEs), which launch plasma and magnetic fields into space, also have become more frequent. When a CME hits the Earth, its collision with the Earth’s magnetic field causes a geomagnetic storm.
So, the GNSS constellations and the GNSS industry should be preparing now. Fortunately, improvements in GNSS software and receiver technology, plus corrections and integrity information and the much larger number of satellites, make us better prepared than we were during the last cycle. On the other hand, the stakes also are much larger, due to our ever-greater reliance on GNSS.
As a sailor, I rely on NOAA nautical charts and marine weather forecasts. GNSS users can thank NOAA for its space weather forecasts.
Hexagon | NovAtel’s GAJT-710ML installed on a U.S. Army vehicle. Photo: U.S. Army Futures Command
We asked Dean Kemp, Ph.D., director of Marketing, Aerospace and Defense for Hexagon’s Autonomy & Positioning division, a few questions.
How do jamming and spoofing threats change?
Jamming and spoofing methods change as new interference-causing technologies become available. As such, it’s vital for us to continuously evaluate potential sources of threats and provide the highest possible level of resiliency to interference in our solutions.
Have new threats emerged in the past six weeks in connection with Russia’s invasion of Ukraine?
Evidence is emerging that electronic-warfare systems capable of high-power jamming and spoofing across wide areas are being used within Ukraine. Fortunately, there have been no known impacts on allied forces. However, knowing that the technology is in place and in use highlights the importance of assured positioning, navigation and timing (APNT) and our contribution to building resiliency in allied forces’ equipment against the potentially destabilizing effects of jamming and spoofing.
How do you define APNT?
We use APNT to describe measurements that are always accurate, available and reliable. Our anti-jamming, anti-spoofing and other resilience-building capabilities provide trusted and available PNT information at the level of accuracy requested.
When did you introduce GPS Anti-Jam Technology (GAJT)? How do you define it?
GAJT was introduced in 2011 and is our leading APNT solution. GAJT units are utilized worldwide across land, sea and air, with rapid deployment supported by commercial off-the-shelf solutions and short lead times. GAJT provides jamming protection of satellite-based navigation and precise timing receivers from intentional jamming and unintentional interference whatever your application. Product variants provide features to best support anti-jamming capabilities for the warfighter, national infrastructure, low-SWaP platforms and other mission-critical applications.
What are the key differences between the GAJT-710ML, the GAJT-710MS and the GAJT-410MS?
The GAJT-710 is designed for land vehicles (ML variant) and marine vessel platforms (MS variant) with up to six simultaneous nulls to protect against jamming signals and interference. The next generation of GAJT-710 includes jammer direction-finding and a silent mode to reduce its thermal signature. The GAJT-410 maintains the high levels of interference-rejection performance in the 710 but in a lower size, weight and power (SWaP) design, with three simultaneous nulls, for both land and marine variants. It also utilizes a single RF cable to provide clean power, data and protected GPS signal. The GAJT-410 enables APNT while also reducing the need for platform modifications or armor penetration.
The GAJT-AE extends jamming and interference protection to unmanned and autonomous applications. Using an external CRPA antenna, the GAJT-AE offers flexibility of integration into space-constrained platforms.
Is the GAJT-AE-N Anti-Jam Antenna receiver-agnostic?
We designed our GAJT product line to be receiver-agnostic and compatible with legacy and modern GNSS receivers. This flexibility results in GAJT being ideal for civil and military applications, including SAASM and M-code systems.
How does your GNSS Resilience and Integrity Technology (GRIT, launched in 2020 November) relate to your GAJT antennas?
GRIT is a firmware suite for our OEM7 receivers that expands their situational awareness and interference mitigation tools. GRIT includes our Interference Toolkit (ITK) along with spoofing detection to identify when your GNSS signal may be under threat. It also empowers the user to develop interference location algorithms through time-tagged snapshots of data samples to characterize the RF environment around your operations. GRIT, alongside GAJT, forms the foundation of our APNT strategy in providing accurate and always-available PNT.
Do you have any recent contracts with the U.S. Department of Defense or the militaries of other NATO countries to supply GAJT antennas?
Our GAJT product portfolio has been sold in large quantities to military and civil organizations for many years, successfully proving itself in the field. In 2020, we achieved a milestone of more than several thousand units shipped worldwide, making it one of Hexagon | NovAtel’s more successful years.
Chip-scale atomic clocks can supplement GNSS receivers to provide accurate and reliable time in GNSS-challenged environments. Photo: Microchip Technology
Accurate and reliable time is just as important as accurate and reliable location for a wide range of military and civilian applications — and GNSS receivers cannot provide either one when they are jammed. For timing, one solution is to supplement GNSS receivers with a miniature atomic clock. We asked Microchip Technology a few questions about their chip-scale atomic clock (CSAC) and Stewart Hampton, the company’s senior product line manager, responded.
How long was your SA65 CSAC in development before you announced it in August 2021? Typically, how often do you launch a new CSAC?
CSAC development started in 2001 under a contract from DARPA with Draper and Sandia laboratories. CSAC was first introduced to the commercial marketplace in 2011, and in 2016 we released an improved product design with an operating temperature range of –10 C° to +70 C°. Last year we released our CSAC SA65 with a wider operating temperature range, faster warm-up and improved frequency stability aimed at the defense and industrial marketplace. So, it has been about five years between major CSAC releases, but that may not be indicative of future products because we have also introduced specialized CSAC versions, such as the Low Noise CSAC (LNCSAC) in 2014 and the only commercially available radiation-tolerant CSAC (Space CSAC) in 2018.
What is the CSAC SA65’s drift rate?
Its typical drift rate is specified at <9 × 10–10 per month. Another key specification, particularly for many portable military applications, is total sensitivity of frequency to temperature (tempco) over a specified range. For the CSAC SA65, that specification is ±3 × 10–10 over the entire operating temperature range of –40 C° to +80 C °.
What are a few specific military use cases?
CSAC is designed into multiple military programs and used in a wide variety of military applications, particularly in GNSS-denied environments — including assured positioning, navigation and timing (APNT) modules, underwater unmanned and autonomous vehicles, software-defined radios, man-portable transceiver-based military communications, vehicle management computers, airborne reconnaissance/UAVs and GNSS-disciplined oscillators. It is also used in command, control, communications, computers, cyber, intelligence, surveillance and reconnaissance (C5ISR). The space CSAC variant is commonly used on low-Earth-orbit space defense payloads supporting such applications as low-latency communications networks, RF geolocation (geointelligence, or GEOINT), optical time transfer, alternative PNT satellites and Earth observation.
Spirent Federal Systems, a PNT simulation company, offers its government customers and contractors a unique solution for anechoic-chamber-based CRPA testing: a patented “zoned chamber” approach using multi-output, multi-constellation GNSS signal simulators to emulate the movement of satellites in orbit.
To address the limits of a standard anechoic chamber, Spirent has created independent zones configured to represent the real-world sky view, using genuine constellations and improved satellite azimuth and elevation arrival angles. Test scenarios can be multi-constellation and multi-frequency with customizable time, date and duration — now lasting hours instead of minutes.
Because scenarios are valid for longer time periods without sacrificing realism, the zoned chamber is effective for validating all aspects of the CRPA system including beamforming, null steering and space-frequency adaptive processing/space-time adaptive processing (SFAP/STAP). CRPA systems with inertial sensors can be tested with static and dynamic scenarios using a positioner within the chamber.
Additionally, to account for multipath and signal obscuration, Spirent has integrated a 3D environment modeling tool which generates all the variables of a multipath-rich environment in real time, including ground reflection. Interference sources such as jammers and spoofers can be added anywhere in the chamber and concurrently simulated with the GNSS signals. Authorized users can also test classified RF signals such as MNSA M-code and Y-code.
“Spirent Federal’s goal is to get new technologies to U.S. warfighters at a speed that outpaces near-peer threats,” said Jeff Martin, vice president of Sales. “The realism of our patented zoned chamber allows advanced CRPA systems to be deployed faster with confidence they will perform in GPS-contested environments.”
Illustration of a simulated test environment incorporating GNSS, multipath and jamming in a Spirent zoned chamber. (Image: Spirent Federal)