French space agency CNES has made available two applications on the Google Play store for Android apps. Both are compatible with Android N (Nougat).
RTCM Converter: This app aims to convert the smartphone GNSS raw measurements to Radio Technical Commission for Maritime Services (RTCM message type 1077) and send them to a caster, for use by third-party software.
PPP WizzLite: This app is a port of the CNES PPP client (code and Doppler only, light version) on Android. Accuracies of 1-2 meters can be reached in kinematic mode, and sub-meter in static mode (using external SBAS data). To do so, users need to pull external RTCM streams for orbits/clocks corrections and broadcasts, such as ones available from the International GNSS Service Real-Time Service (IGS RTS).
Both apps have been validated on a Nexus 5X device with no phase support.
Skydel, a GNSS test solutions company, has partnered with Germany-based Noffz to deliver SDX GNSS simulation to clients in Europe.
Noffz creates test systems and solutions in the area of the Internet of Things (IoT) — especially in automotive RF-test applications around eCall, network access devices, telematics control units, infotainment/multimedia units and automotive radar.
With nearly 30 years of experience, Noffz delivers worldwide turnkey solutions and PC-based measurement, as well as automation systems.
“With their broad expertise in test solutions, Noffz is well positioned to bring Skydel’s SDX GNSS simulation solutions to clients located in Europe and beyond,” Skydel said in a blog.
“Technology is constantly evolving,” reads the blog. “With the advent of new satellite constellations, such as Galileo, expanding needs for position and navigation in the transportation industry, and the growing threats of RF interferences, GNSS simulation is more than ever a key component in the arsenal needed to design and validate new products.
“Skydel SDX delivers a new paradigm in GNSS simulation, featuring an exclusive mix of performance, flexibility and unique capabilities. With the addition of Noffz’s know-how covering multiple industries, we now have an outstanding team that’s ready to tackle today and tomorrow’s technological integration challenges.”
Galileot will reach Full Operational Capability (FOC) in 2019. Simulation of the complete Galileo constellation is possible with Skydel’s SDX GNSS simulator.
Q: Where is leading technology trending for UAV navigation in complex, unstructured, and uncertain (GNSS-denied) environments in industrial applications?
A: Tight integration between GNSS and inertial navigation systems (INS) can provide accurate, reliable navigation in GNSS-challenged environments, and advances in MEMS inertial technology continue to push the performance of systems that meet the size, weight and power requirements for UAV systems. These GNSS/INS sensors will continue to improve and form the core of the navigation system as additional navigation aids, such as computer vision, are added to address more demanding GNSS-denied applications.
Alexis Guinamard, Chief Technical Officer, SBG Systems
A: Industrial UAVs need trustworthy navigation units. Drastic sensor selection, thermal calibration, and signal processing techniques are mandatory to cope with high temperature / vibrating environments. Advanced algorithms design is also a key to make UAV navigation more reliable in challenging environments: An extended Kalman filter that fuses inertial and GNSS data maintains an accurate trajectory, even during GNSS outages. Next challenge is to get real-time inertial data fusion with GNSS, and vision or Lidar sensors!
Jan Van Hees, Director Business Development, Septentrio
A: Inertial sensors, vision and radar-based distance sensors provide positioning in GNSS-challenged environments. However, experience teaches that even there, GNSS signals can often be received, albeit intermittent or badly disturbed. And GNSS is still the easiest absolute positioning reference available. Therefore, much effort goes into developing robust GNSS technology with reliable quality information, which continues to play a crucial role in the positioning solution, fused with the aforementioned technologies.
Octopus ISR Systems, a division of UAV Factory Ltd., has released a precision geo-pointing feature for its miniature Epsilon series of gyro-stabilized gimbals. The feature, Precision Geo-Lock, combines a GPS-aided inertial navigation system (GPS/INS) with dedicated software algorithms and payload operator software.
To guarantee the successful implementation of the Precision Geo-Lock feature, UAV Factory partnered with VectorNav Technologies of Dallas.
Precision Geo-Lock provides the user with highly accurate target geo-location, range-to-target, as well as Geo-Lock functionality and moving map user interface.
Equipping a miniature airborne gimbal with precision geo-location presents a multitude of challenges. The gimbal operates in a high vibration environment and is subjected to high accelerations and extreme ranges in temperature. In addition, small size and low power consumption are significant factors for miniature gyro-stabilized gimbals which are often used in unmanned aircraft.
The attitude solutions commonly available onboard unmanned aircraft typically do not present a reliable solution.
“Traditionally, small gyro-stabilized gimbals use an external heading source to estimate the geo-location of the target,” said UAV Factory CEO Konstantins Popiks. “Onboard the unmanned aircraft, the attitude data is usually supplied by an autopilot, and the estimate accuracy is not very precise due to the nature of low-cost sensors used in miniature autopilots. Miniature autopilots simply do not need the precise heading data required by the gimbal, and as a result, the heading error generates large geo-location errors and provides little to no use for the unmanned aircraft operator. There are also additional errors due to misalignment of the gimbal and autopilot, as these are separate subsystems mounted in different locations on individual soft vibration mounts.”
VectorNav’s VN-200 surface mount GPS/INS.
To enable the Geo-Lock feature, an external GPS/INS needed to be integrated, and such a GPS/INS needed to provide a high level of accuracy.
“Today, the state- of-the-art miniature gyro-stabilized gimbals have a narrow field of view of less than 1.3 degrees; therefore, the accuracy of the pointing should be significantly better than 1.3 degrees to prevent the target pointing location from going out of the video frame,” Popiks said.
VectorNav is a developer and manufacturer of high-performance inertial navigation systems using the latest in MEMS sensor and GPS/GNSS technology. VectorNav’s industrial series line of inertial navigation solutions provide small, light and low-power consumption solutions in the industrial-grade inertial navigation performance category (attitude accuracy 0.1-0.3).
“VectorNav’s VN-200 was the only product on the market that offered a high-level of performance but small enough form factor that it could be integrated directly into the optical bench of the gimbal,” Popiks said. “When the product delivered that level of accuracy despite the high vibrations, accelerations and temperature fluctuations of our application the choice was obvious.”
UAV Factory’s Precision Geo-Lock provides better than 0.3 degree accuracy and is plug-and-play, so the customer can install the Epsilon gimbal and get accurate results on any platform and in a high-vibration environment.
Epsilon gyro-stabilized turrets will be available with both VectorNav’s VN-200 single GPS-based INS solution, as well as the VN-300 dual GPS-based INS. A single GPS/INS solution is suitable for dynamic platforms such as manned and unmanned aircraft, while dual GPS/INS is a necessity for platforms with low dynamics, such as aerostats, ships and helicopters.
Spirent Communications has released its first WAVE-DSRC (Wireless Access in Vehicular Environments – Dedicated Short-Range Communications) conformance test solution that includes a set of tests required for U.S. Department of Transportation (USDOT) certification.
In late 2016, the USDOT proposed a rule that would require automakers to include vehicle-to-vehicle (V2V) technologies in all new light-duty vehicles. The purpose is to make V2V devices “speak the same language” through standardized messaging deployed throughout the industry. Mandating that vehicles “talk” to each other enables a multitude of new crash-avoidance applications that could prevent hundreds of thousands of crashes each year.
Spirent’s TTsuite-WAVE-DSRC consists of four different protocol conformance test suites as per the USDOT Certification Operating Council (COC) conformance test specifications. It enables full test automation, includes frameworks for individual adaptation, and it is extensible with many plug-ins to meet constantly changing development requirements.
“We are carrying the ball as far as we can to realize the potential of transportation technology to save lives,” said U.S. Transportation Secretary Anthony Foxx on the NHTSA website. “This long promised V2V rule is the next step in that progression. Once deployed, V2V will provide 360-degree situational awareness on the road and will help us enhance vehicle safety.”
“Spirent is proud to support the activities of the U.S. Department of Transportation with modern solutions for testing in-vehicle and V2X connectivity,” said Thomas Schulze, director of marketing and business development for Spirent Communications. “Our engagement helps to improve the future of driving by ensuring high-quality products that provide more safety, more convenience and more infotainment options than ever before. We are committed to assisting our customers accelerate the development and deployment of automated vehicles.”
This new product release is targeted at companies supplying or testing WAVE-DSRC ITS technology. Spirent’s TTworkbench is a full-featured integrated test development and execution environment that offers a variety of functions including DUT monitoring and simulation. It includes support for all of the Automotive international standard test specifications, including the OPEN Alliance, AUTOSAR and Avnu Automotive test specifications.
One-third of GPS World readers who responded to the latest poll think air traffic control and the FAA regulatory environment constitute the biggest challenges facing the UAV industry today. Other answers receiving top votes, from 10 to 27 percent of the total, included
Better, smaller, more lightweight sensors: inertial, Lidar, infrared, spectral, etc. (16 percent)
Integration of other sensors with GPS/GNSS. (10 percent)
Competition from satellite and aircraft imagery/mapping. (9.8 percent)
Definition of sensor performance specifications for navigation, in particular GNSS & SBAS MOPS-like standardisation.
Something simple that will make it visible on primary radar
Longer flight time
To learn more about overcoming such challenges, tune into the free April 20 webinar, “From Flying Drones to Doing Business,” addressing ease of use for the user in business applications. The webinar will cover a broad range of issues concerning sensor integration aboard a flying platform, and in particular their use for commercial purposes. Webinar attendees will have the opportunity to ask direct questions of the speakers, both upon registration and during the live event. Register free at env-gpsworld-integration.kinsta.cloud/webinar.
Speakers
Gustavo Lopez, product manager GNSS solutions for UAV applications, Septentrio
Jan Leyssens , managing director, Sales and Business Development, Airobot
Francois Gervaix, product manager – Surveying, senseFly SA
Zak Kassas, assistant professor in the Department of Electrical and Computer Engineering, University of California, Riverside
Orolia has taken the next integration steps with its Spectracom line of resilient PNT products, which will enable clients to take full advantage of Talen-X’s BroadShield Interference and Spoofing Detection technology.
The announcement follows up on news of the recent Talen-X strategic alliance.
Orolia’s Spectracom and Talen-X have aligned hardware and software development efforts to jointly develop, market and sell an advanced PNT solution. The goal is to combine the strengths of Spectracom’s resilient PNT products with Talen-X’s interference and spoofing detection suite (BroadShield).
In addition, under the alliance, Orolia will manufacture SecureSync precise time and frequency references with BroadShield integrated for Talen-X in its Rochester, New York, facility.
Logo: Orolia Spectracom
Many mission critical defense, government and commercial operations require highly accurate and reliable PNT data but often rely on signals from GPS/GNSS satellites that are increasingly susceptible to interference or jamming. The Talen-X BroadShield technology is a fully integrated software option available within Spectracom SecureSync.
Working with standard SecureSync GPS/GNSS receivers, BroadShield uses its unique software algorithms to detect anomalies in the GPS signal, including unintentional interference and malicious attacks. Armed with feedback from BroadShield detected anomalies, the integrated solution provides notification, alarming and automatic disabling of GPS/GNSS synchronization.
At the same time, BroadShield interference and spoofing detection technology enhances the resilient PNT capabilities of the best-selling Spectracom SecureSync line of time and frequency reference systems. BroadShield achieves this by ensuring mission critical applications receive reliable, accurate and precise time and frequency information in a variety of challenging environments.
In addition, Spectracom SecureSync will take full advantage of Talen-X’s BroadShield algorithms, which are known for meeting the requirements for critical infrastructure published by the U.S. Department of Homeland Security (DHS).
Beyond complying with DHS best practices, Talen-X has further enhanced the BroadShield algorithms to go beyond detecting threats. With this enhancement, Spectracom SecureSync operators have detailed threat characteristics, real-time situational awareness and recorded data for pos-event forensic analysis.
“This synchronized solution is designed to meet both government and commercial requirements by improving the protection of GPS/GNSS based critical infrastructure systems against emerging GPS/GNSS threats,” said Greg Gerten, Talen-X CEO. “Talen-X’s interference and spoofing detection algorithms have been successfully supporting the U.S. Department of Defense (DoD) in Navigation Warfare (NAVWAR) testing for over six years, and are ready to be leveraged to protect civil communities as well.”
“Orolia is focused on providing Resilient PNT solutions, combining and layering technology in innovative ways that help our customers meet their mission goals,” said John Fischer, Orolia’s V.P. of Advanced R&D. “This new capability from Talen-X augments our systems with a unique ability to detect and mitigate emerging GPS and GNSS threats more effectively.”
LORAD++ CORE, an alternative PNT source to combat GNSS denial: 60 x 30 x 8 millimeters
A new series of integrated eLoran/Chayka/GNSS receivers emphasize low-power requirements and small size for alternative positioning, navigation and timing (PNT) to reduce risks of GNSS denial.
Loradd++, from Netherlands-based firm Reelektronika, consists of a receiver board of 60 x 30 x 8 millimeters, consuming less than 500 milliwatts (3.3 volts) in continuous operation. The Loradd++ can be used with either E-field or H-field antennas, features dual serial interface for integrated systems, and is connectable to certain miniature GNSS receiver modules.
eLoran and Chayka are recognized as alternative PNT systems, but current receivers on the market are large in comparison to miniature GNSS devices. Chayka is a Russian terrestrial radio navigation system, similar to Loran-C. It operates on similar frequencies around 100 kHz, and uses the same techniques of comparing both the envelope and the signal phase to accurately determine location.
The first of a new series of receivers is Reelelektronika’s Loradd++/E, which is an integration of the Loradd++ with an E-field antenna housed in a small single radome that can be connected via a data cable (up to 150 meters) and a dongle to a USB port on a PC. The radome contains a u-blox M8T GNSS receiver with antenna and measures 135 millimeters in height and 85 millimeters in diameter. The Loradd++/E needs less than 700 milliwatts at 4-16 volts.
Reelektronika manufactures eLoran equipment for users, service providers and surveyors. The company developed the eDLoran system. eDLoran works with existing Loran transmitter stations and yields differential Loran position and navigation accuracies comparable to GPS; see the cover story of the July 2014 issue of GPS World. The system can thus be considered as a robust backup for GPS.
The U.S. Department of Transportation (DOT) is studying responses to its November 2016 request for information concerning back-up systems for GPS. DoT is investigating possibilities and practicalities of using one or more positioning, navigation and timing (PNT) technologies to ensure PNT resiliency for critical infrastructure in the event of a temporary disruption in GPS availability.
The filing period closed Jan. 30.
RFI Response
Several companies responded to the RFI. Statements from Satelles, NextNav, NovAtel, Allied Partners, Harris, UrsaNav, and Orolia dba Spectracom were not made public because they “contain confidential business information data.”
Statements are available at the web page from Oakridge National Laboratory, UrsaNav and iPosi, SAE International, the GPS Innovation Alliance and Locata Corporation, which made its response openly available “to kick off the necessary public discussion.”
Senate Inquiry
At a Feb. 8 Commerce Committee hearing, Sen. Roy Blunt asked DoT Inspector General Calvin Scovel about progress on GPS back-up, which DoT and the Deputy Secretary of Defense announced they would “be working on” in 2015. Scovel responded with information about the Federal Aviation Administration’s next-gen plan, which did not address the question.
Sen. Blunt then asked Scovel to submit a written answer for entry into the final record of the hearing: “My question for the record will be that this commitment made in 2015 concerned about the current dependency that so many people have with GPS, is ‘Are they moving forward with a backup system if the current GPS system goes down?”
You’ve probably heard of at least one of those terms in any discussion around GPS anti-jam technology for defense.
Because they are all terms that describe essentially the same thing: a specialized antenna that helps protect GPS receivers from interference and jamming.
But what exactly are they? Where did they come from? How do they work? What comes next? Read on and find out.
A bit of history
Let’s go back to the Cold War era, at a time when Soviet and Western states were continuously battling for electronic warfare (EW) superiority. In the early to mid-Cold War, radar jamming was the name of the game. Soviet aircraft, such as the TU-16 Badger and its derivatives, carried a range of EW equipment, including some very high-power jammers designed to interfere with radar systems.
Figure 1: TU-16 Badger, an important Soviet electronic warfare platform during the Cold War (Photo: Wikipedia)
Fast forward to the latter years of the Cold War, and we reach the era when the U.S. was busy developing the exciting new GPS system. The Department of Defense (DoD) wanted to ensure that a robust and accurate global navigation system was available to the military, and so the Navigation System with Timing and Ranging (NAVSTAR) launched its first satellite in 1978, eventually becoming the fully operational GPS system by 1993.
Magnificent and ground-breaking though it was, it was recognized very early on that GPS relied on very low-power satellite transmissions, and would be vulnerable if someone tried to interfere with it. Given the prevalence of high-power jamming during the still-ongoing Cold War, there was concern that, if an adversary knew about GPS, they could easily render it useless in a given operational area.
And so it was that the CRPA came to the rescue.
Enter the CRPA
Once again, this GPS anti-jam technology finds its roots in the Cold War, and specifically in radar technology, where engineers developed clever ways to ensure their radars could continue to operate in the presence of jamming. Sidelobe cancellation (SLC) was a well-established technique in the radar community, where a received jamming signal could be “cancelled” by combining the outputs of more than one antenna in the right way.
So, it didn’t take long to adapt this radar anti-jam technology to the problem of GPS protection, and the CRPA was born. At this point I must declare a modicum of national pride, as the earliest operational GPS anti-jam unit that I know of was British. The Plessey PA 9800 GPS Anti Jam Unit was built at Roke Manor in 1984, and tested in the U.S. at the Yuma Proving Ground, Arizona, in 1985.
This pioneering technology could defeat up to three simultaneous jammers in the shown configuration, but was modular in construction, allowing further channels to be added for handling higher numbers of jammers. And all of this in 1984, in the UK, for a U.S. military navigation system that wasn’t even fully operational yet. Incredible.
From then until the present day, CRPAs have seen continual interest and development as the technology of choice to protect GPS from jamming. So how do they work?
Theory of operation
A CRPA is attractive, because it doesn’t require you to make any changes to the GPS receiver itself: It simply replaces the existing antenna. CRPAs are generally larger than typical GPS antennas, because they contain a number of antenna elements, and some associated electronics to do the clever stuff.
There’s nothing magical or mystical about the basics of CRPAs: It’s just standard theory from your favorite textbook on adaptive signal processing. But, as ever, the devil is in the detail — how to make them work well in practice is more involved. And as the technology is generally export-controlled, I shall leave out the important in-depth details.
CRPAs work by exploiting spatial diversity; that is, making use of the fact that the desired satellite signals, and the unwanted jamming signals, generally arrive from different directions. In simple terms, you create a spatial filter, one that removes signals that arrive from particular directions, whilst letting through signals from other directions. To achieve this, rather than use a single antenna, we use an array of antenna elements.
Let’s think in simple and intuitive terms about how this works. Take a look at Figure 3. Here we have a primary antenna P, and some auxiliary antennas A1, A2, and so on. A signal arriving from the direction shown impinges on antenna A2, and slightly later it arrives at A1, and later still it arrives at P. For the sake of argument, if the signal is a simple sine wave, you will then find that the output from each antenna is that same sine wave, but with a different phase shift depending on the spatial arrangement of the antennas.
Now, let’s consider what we call the “weights,” which are labeled as w1, w2 and so on. Each of the weights, in this case, is simply a phase shift that we can define. By careful choice of weights, we could choose to make each of the antenna outputs align perfectly in phase, and then, when we sum all the outputs together as shown, we end up with a bigger version of the input signal.
This is what we would like to achieve if the signal was a satellite. We “steer” maximum overall antenna gain towards that satellite. This is typically what is meant when we refer to “beamforming;” It means steering maximum antenna gain towards a satellite.
Conversely, we could also choose the weights to have the opposite effect: to minimize or completely cancel out the signal. This, of course, is what we would like to do if the signal was a jammer, and is referred to as “nulling” or “null-steering.”
Figure 3. Adaptive antenna basics.How do we determine what those weights should be? Well, this is where your standard theory in adaptive signal processing comes in. Let’s say the objective is to minimize the jamming power out of the antenna. We can write the output power of the adaptive antenna as:
Figure: Michael Jones
The average output power can be found by taking expectations:
Figure: Michael Jones
Taking the minimum and rearranging this leads to the well-known Wiener equation:
Figure: Michael Jones
This Wiener equation is the one to remember. It says that the optimum weights can be found by taking the inverse of the data covariance matrix, and multiplying it by the vector of cross correlations between the primary and auxiliary antennas. As in any adaptive signal processing problem, a simple way to solve the Weiner equation and get the weights might be to use your favorite gradient descent algorithm, such as least mean squares (LMS):
Figure: Michael Jones
However, a solution using this approach does have its problems, for reasons beyond the scope of this article. The mathematics of beamforming are also bit more involved, so I’ll leave that out here.
Rather than the grossly simplified diagram used here, most decent CRPAs also use a more complex architecture based on space-time adaptive processing (STAP) or space-frequency adaptive processing (SFAP). This generally allows much higher levels of jammer cancellation against a wider range of threats.
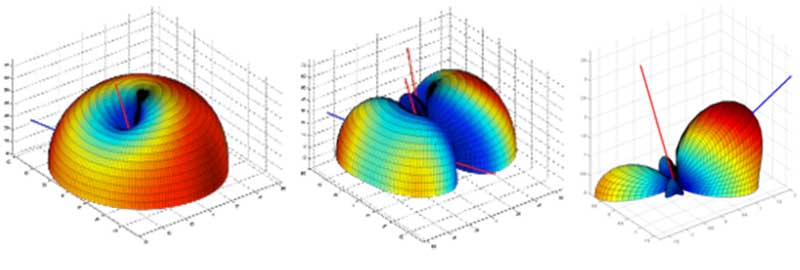
To finish off this whirlwind section on CRPA basics, let’s see what some example antenna gain patterns might look like. In the figures below, the blue line represents the direction of arrival of a GNSS satellite signal, whilst the red lines indicate the direction of arrival of a jammer. In the first diagram we have a single jamming signal: the antenna gain pattern is a nice hemisphere, as we would generally like, but there is a nice deep null in the direction of the jammer. Moving on to the next diagram, we can see the effect of having three simultaneous jammers on the same CRPA: again we have nice deep nulls in the direction of each jammer, but we are starting to lose more of the sky, and we may start to lose the odd satellite as a consequence. Finally, we have an example of beamforming on a single satellite, whilst nulling out a jamming source.
Again, it’s beyond the scope of this article, but the layout of the antenna elements plays an enormously important part in the performance and behavior of the CRPA.
Figure 4. Illustrative beam patterns of a CRPA antenna in the presence of jamming. (Figure: Michael Jones)Figure 4: Illustrative beam patterns of a CRPA antenna in the presence of jamming (Figure: Michael Jones)
Operational Anti-Jam Units
With some images courtesy of my friends at Raytheon, let’s look at a few examples of deployed military CRPA hardware over the years.
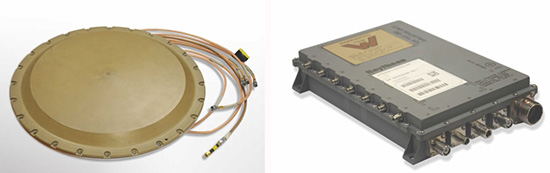
The GAS-1 system entered service in the U.S. in 1997, as a replacement for the earlier AE-1 (1990 to 1996). The CRPA is composed of two parts: the antenna array, which is a seven-element layout, and the antenna electronics as a separate box. The GAS-1 was incredibly successful and became the de facto standard anti-jam technology, fitted to air and sea platforms around the world. Even today, 20 years after its launch, it continues to be fitted to many platforms.
Figure 5. GAS-1 CRPA. (Photo: Raytheon)
By the late 1990s and early 2000s, the Navigation Warfare (NAVWAR) program was in full swing, and the military was looking for enhanced protection against evolving jamming threats. The U.S. initiated a program called Advanced Digital Antenna Production (ADAP). The ADAP product, launched in 2006, was a direct form-fit replacement for the analog GAS-1 system, and introduced a number of advanced features. Most notably, the ADAP simultaneously protects both the L1 and L2 frequency bands, and utilizes STAP processing to achieve high levels of wideband jammer cancellation.
Figure 6. ADAP Digital CRPA. (Photo: Raytheon)
In parallel with the ADAP development, the Digital Antenna Control Unit (DACU) was different in a number of ways. Firstly, it was a true beamforming solution, allowing simultaneous antenna beams to be steered toward satellites, whilst simultaneously nulling out jammers.
Secondly, it was tightly integrated with the GPS receiver, with the GPS receiver hardware located in the same unit.
Thirdly, the DACU was able to perform a number of other advanced functions, such as direction-finding of interference sources. Interestingly, the DACU was used to help locate the source of the interference at the notorious Newark airport jamming incident in 2009.
By the mid-2000s, CRPA electronics were pretty mature and well-understood. The electronics had been miniaturized, and pretty much everything was put onto a single chip. But the physical size of the antennas persisted as a problem for some platforms requiring low size, weight and power (SWAP).
The Landshield, launched in 2014, was a step-change in CRPA technology. Not just because it was a small and fully self-contained unit (about the size of a hockey puck), but because it was the world’s first CRPA to include true anti-spoofing capability.
Figure 8. Landshield Advanced CRPA with Anti-Spoof Technology. (Photo: Raytheon)
Blurring the lines between military and civilian
Going back a few years, the military was heavily focused on CRPAs and anti-jam techniques in general. Military GPS receivers had been developed and deployed, and the question was how they could retrofit robustness to them. At the same time, the commercial world was heavily focused on mass-market GPS receivers — reducing cost, increasing performance — with little care about jamming.
If you’d talked to me five or six years ago, I would have said the military sector is 20 years ahead of the commercial sector in anti-jam technology, and the commercial sector is 20 years ahead of the military sector in receiver technology.
This assertion holds far less true these days; the lines of separation are much more blurred. The military is learning from the commercial world, embracing COTS, and developing new GNSS receivers. Conversely, civilian applications are now much more concerned with jamming, leading to the adoption of low-cost CRPAs in non-military applications.
The future of the CRPA
Where will CRPA technology go from here? We’ve already seen that the latest generation of CRPAs now performs anti-spoofing, as well as anti-jamming. But there is plenty more to see yet.
Although the core technology behind CRPAs is now mature, the trend for the future will be about “doing more with less.” CRPA technology will become more of a multi-function system. Military platforms need to cut down on the number of separate systems they install, and so CRPAs are likely to become multi-functional, performing situational awareness and signals intelligence.
As antenna technology progresses, we will likely see protected navigation solutions utilizing the same hardware as communication systems and radar systems, providing CESM and RESM functions, and being part of an integrated electronic warfare suite. And conformal antennas will see a resurgence of interest for complex and space-constrained platforms.
A U.S. Congress hearing on March 29 focused on the vulnerability of satellite systems to strategic attacks, according to an article by The Hill. The GPS constellation in particular was discussed as critical to energy, telecommunications and finance sectors.
Experts and lawmakers expressed their concerns at the joint hearing between the House Homeland Security Committee and House Armed Services Subcommittee on Strategic Forces.
The Hill quotes William Sheldon, former commander of U.S. Air Force Space Command: “Many of us remember the tagline from the 1979 movie Alien: ‘In space, no one can hear you scream.’ From my perspective, apparently no one can hear you scream about space vulnerabilities either. Many have banged the gong since 2007, but 10 years of studies and policy debates have not produced tangible improvements in our space defense posture. If you know the armed burglar is on the front porch, you do not wait until he’s inside to take action.”
Retired military officials and a former deputy administrator for the Federal Emergency Management Agency were among those testifying.
GPS Source has received Global Positioning Systems Directorate security approval for its family of Selective Availability Anti-spoofing Module (SAASM)-based Host Application Equipment (HAE).
GPS Source announced security approval for the Enhanced D3 (ED3) and Enhanced FLO-G (E-FLO-G) with integrated SAASM receivers. The ED3 and E-FLO-G are upgradeable versions of the popular DAGR Distributed Device (D3) and are capable of distributing SAASM today, and M-code protected GPS data when implemented.
Enhanced DAGR Distributed Device by GPS Source.
GPS Sources’ family of PNT distribution products represents the most advanced, cost effective and comprehensive solution available on the market to support Department of Defense’s GPS modernization efforts. Moreover, the ED3 and the E-FLO-G bridge the gap between legacy systems deployed today and the C4ISR/EW architectures of the future.
“We understand the importance of designing products that comply with all GPS Directorate security requirements,” said Robert Horton, CEO of GPS Source. “This security approval makes it possible for the ED3 and E-FLO-G to be deployed by military forces without reservation. GPS Source is proud to be a key supplier of such important enablers to the warfighter and to be the provider of innovative military GPS solutions to our defense customers.”
“Integrating legacy equipment utilizing SAASM receivers with future equipment relying on M-code receivers is challenging,” Horton continued. “But through Independent Research and Development, GPS Source ensured the ED3 and E-FLO-G integrate appropriately with SAASM today and M-code in the future. These accomplishments exemplify the technology in development by GPS Source to sustain the equipment that warfighters will employ today and tomorrow.”
GPS Source has begun taking orders for the ED3 and GLI-FLO-G. Production will start mid-year. Questions about this technology can be directed to Kurt Williams, director of Sales and Marketing.