Partnership Council Affords Insight, Drama
By Alan Cameron
 This year’s GPS Partnership Council provided among other highlights a discussion of the tensions between commercial off-the-shelf (COTS) receiver systems used in tactical combat operations versus official military GPS user equipment (MGUE), and an enthralling warfighters’ panel that revealed much of those COTS/MGUE dilemmas. The event, held May 1–2 in El Segundo, California, drew an enthusiastic and involved audience, including many GPS veterans. I was struck by the graying of the clan as well as the practiced and confident presentations of current civilian and military program staffs.
This year’s GPS Partnership Council provided among other highlights a discussion of the tensions between commercial off-the-shelf (COTS) receiver systems used in tactical combat operations versus official military GPS user equipment (MGUE), and an enthralling warfighters’ panel that revealed much of those COTS/MGUE dilemmas. The event, held May 1–2 in El Segundo, California, drew an enthusiastic and involved audience, including many GPS veterans. I was struck by the graying of the clan as well as the practiced and confident presentations of current civilian and military program staffs.
Keynote speaker Brig. Gen. Martin Whelan, Director of Requirements, Headquarters Air Force Space Command, emphasized that ideas for improvement of the system would be hard sells under current budget realities, but good ideas for lower cost would be welcome. Referring to the three segments — space, ground, and user — he recommended that the segments should talk with each other and challenge requirements. In effect, he implied that the separate segments could reduce overall costs, rationalize requirements, and cooperate better in optimizing the resilience and flexibility of the system, including — this is my interpretation — taking advantage of the “competitive” GNSSs to effect user satisfaction.
According to Whelan, resiliency of the space segment is a top priority; smaller satellites, hosted payloads, and net-centric designs were highlighted. He commented that multiple GNSSs should be employed in such a way that the user does not know the difference.
Regarding the upcoming budget, he told us that Department of Defense will be cut by 22 percent, the Air Force will drop 9 percent — but the AF space budget only 1.5 percent. A notable exception to the generally favorable overview was his comment that the MGUE segment, from a distance, looked uncoordinated. Much more along this line came up later during both days of the Council.
Widespread COTS. There was an air of defensiveness about the user segment, and many comments on both the success and the risks associated with the widespread use of COTS user equipment. We heard further commentary on the very infrequent use of SAASM keys, due to the difficulty of procedures to obtain and employ them, and due to the perception of very low risk of jamming and spoofing threats in current combat deployments.
A session on “The Future Military Receiver” enlisted two panels of government experts and contractors from Deere-NavCom, Garmin, IEC, Johns Hopkins Applied Physics Labs, Raytheon, and Rockwell-Collins. Although the unclassified nature of the presentations limited the level of detail, it clearly emerged that many tactical, in-combat deployments of COTS GPS receiver systems had occurred and continue to occur.
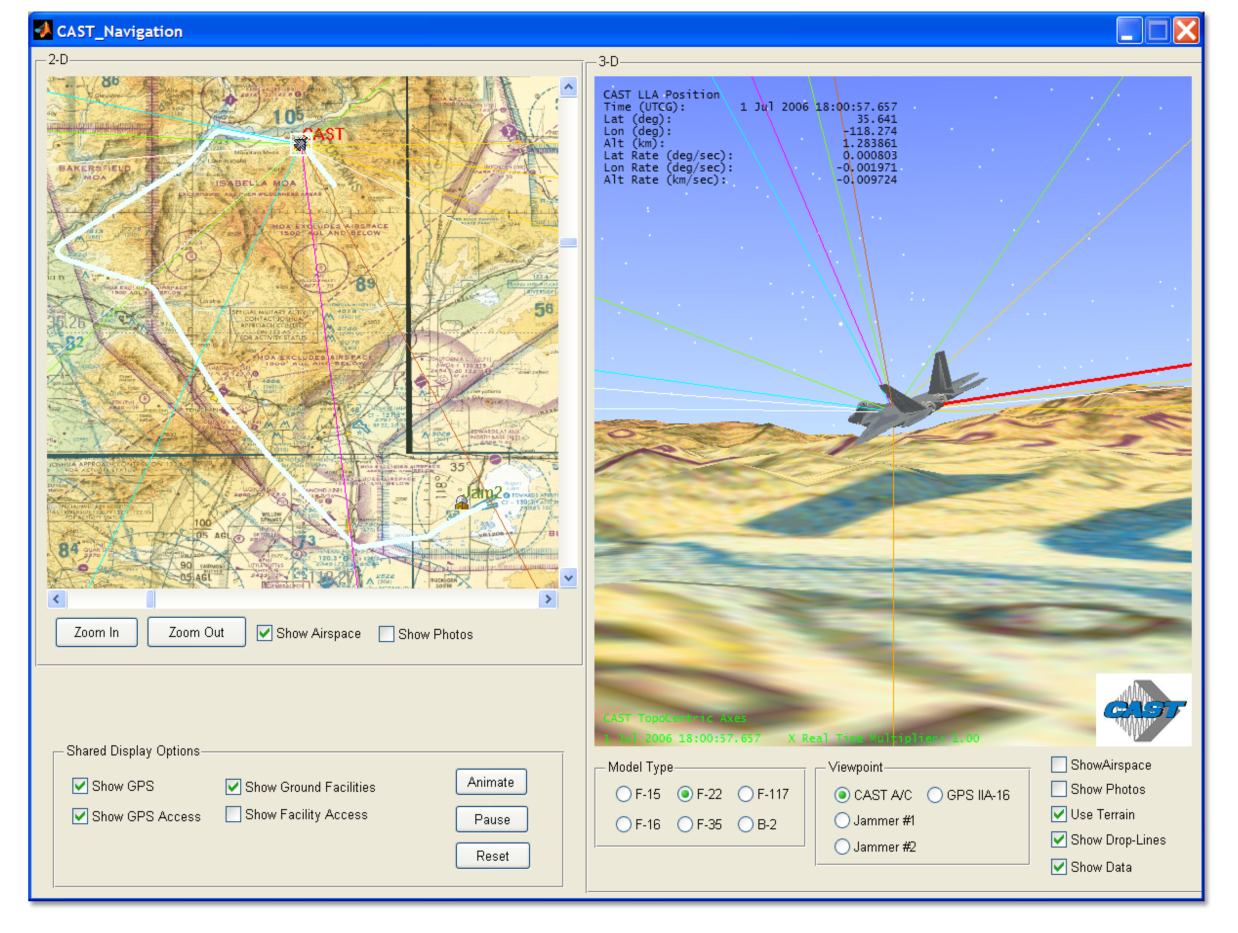
A video compared the jamming resistance of a Garmin receiver with that of approved GPS User equipment receivers. It showed a screen of the Garmin receiver losing satellites at greater distances from the jammer and losing lock at closer distances. Directorate employees and officers made several references to the risks from dependence upon COTS receivers, and related with considerable candor the difficulties with large, expensive, power-hungry MGUE, both mobile and platform-mounted, models of which were held up during the presentations — often to laughter from some in the audience.
More on this followed in Day Two’s dramatic warfighters’ panel, which many people felt was by itself worth the price of admission. These experienced users of GPS under fire — from Coast Guard search and rescue to Air Force forward controllers calling in air strikes within range of small-arms fire — related direct personal experience in a broad array of critical applications. They clearly knew how to use COTS equipment to good advantage and described the operational protocols developed from hard and sometimes painful experience.
Manipulation of multiple screens in a heavy device, which requires initialization or synchronization before dismounting, was often simply not an option. Translation of such experience into qualified requirements is a major challenge for the Air Force and Army. Overdependence on the anecdotal but very valid combat experiences would weaken a design against an enemy with even rudimentary jamming and spoofing capability.
An astute questioner asked “Have you seen any evidence that the enemy (in Afghanistan) has changed tactics because of our technology?”
The answer came “Not yet,” with a comment that the enemy’s early warning systems are very sophisticated and the target of a mission to capture a high-value individual (HVI) frequently knows that such a mission is underway; his support network spirits him away and attacks the mission with the advantage of surprise denied to our forces, abetted by the advantage of favorable terrain and numbers accruing to the enemy.
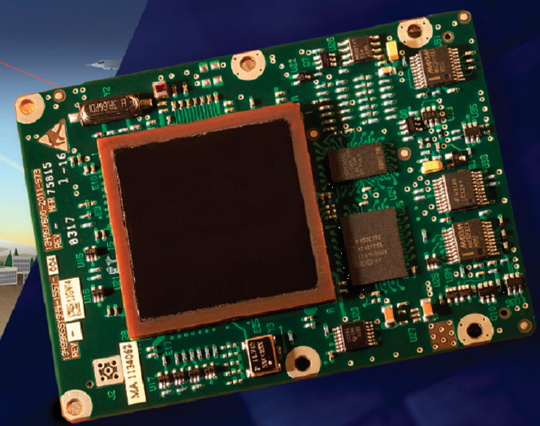
The Puck. The Army-led MGUE program status was described as being at technology readiness level (TRL) 6.0; the request for proposals was released on April 16. The key to the success across platforms of this “system of systems” was said to be the Common GPS Module (CGM), also referred to as the Puck. This module is M, P, and C/A code-capable and SAASM-capable but has flexible interfaces and “emulates commercial.” The module itself is a system-on-chip (SoC) that can be integrated across many platforms. Depending upon the level of integration employed, it can be as small as chips found in smartphones or somewhat larger.
The program schedule was defended as having only been funded two years ago and having very complex security and platform interfaces. This program presentation drew a large number of questions and commentary from the audience, much of it politely skeptical and showing impatience with the bureaucratic aspects of the program. Well-informed former military field-grade officers in the audience questioned its real availability. The answer that it would be available in quantity sometime in 2017 did not please the questioners.
In short, procurement regulations appeared to be the highest barrier to a rapid, flexible program for a net-centric, open-architecture system development.
Currently, the circuit boards for the MGUE are classified secret, but it is hoped to have these at a confidential or unclassified level for deployment by handling the encryption exclusively in software. The leader of this presentation indicated that software receivers were the ideal but were not available, so reduction in size, power consumption, and complexity in hardware was the goal.
Trumping Military. One almost nostalgic comment hearkened back to the time when military systems were regarded as the height of technological excellence, whereas it is now generally perceived that commercial systems trump the military in sophistication. Garmin claimed to have developed SAASM receivers in the lab but found little interest from business leaders at that time.
The CEO of Mayflower Communications, which makes and sells miniaturized SAASM receivers, pointed out that anybody could make a SAASM receiver employing a Sandia crypto-chip approved by the U.S. National Security Agency (NSA) but pointed out, as did several others, that the availability of certifications and authorizations was very limited, and that volume drove cost. Implicitly, NSA’s requirements and protocols got blamed for the limited distribution and use of SAASM receivers.
Day Two
The second day of the GPS Partnership Council comprised The Nation and The Warfighter. In the latter group came an outline of the Army’s COTS vision and — the hit of the entire conference — the Warfighter panel with a keynote introduction by a USAF colonel warrior now at the GPS Directorate.
The Nation. Tony Russo, director of the National Coordination Office for Space-Based Positioning, Navigation, and Timing, disabused those who thought that the apparent demise of the LightSquared threat had eliminated that subject from his agendas; he still deals with it often. He provided entertaining and informative examples of non-obvious and valuable applications of GPS, from assessing rugby players’ game performance through detection of clandestine underground nuclear tests to a social application of matching available part-time and temporary workers with jobs when labor demand surges and a roster shows where the closest qualified candidates are.
John Merrill of the Department of Homeland Security (DHS) identified 18 critical infrastructures that depend upon GPS integrity and showed the cascading effect of taking out sites like SCADA (Supervisory Control and Data Acquisition) systems. He related a threat-illustrative story of a DHS agent who required constant contact via his agency smart phone but who could not get reception while attending mass in church. The pastor later and very proudly showed him the mobile phone jammer in the sacristy; he had given up on asking parishioners to turn off their cell phones off during services.
James Miller of the National Aeronautics and Space administration noted that only 5 percent of space missions lie outside the GPS coverage envelope (3,000 kilometers to geostationary altitude of 35,800 kilometers is the space service volume). Reducing the burden on spacecraft tracking networks is a highly profitable application for GPS.
Warfighters Panel. These real-life experiences from combat and other vital operations could easily justify an entire article of their own. The following examples will illustrate the life-saving force multiplication of GPS, particularly the ubiquitous civil GPS technology in the current combat environment.
• An Air Force Special Operations Major described a mission to snatch an HVI, giving great detail on battlefield terrain, combat conditions, and how he worked between a COTS GPS receiver and a COTS handheld computer with Google Earth-like facilities to bring JDAMs (GPS-equipped smart munitions) onto an ambush mounted by defenders of the HVI, who were alerted to the raid by their extensive and sophisticated early-warning network consisting of sympathizers with cell phones. His description of the heroics of individual forward controllers, their injuries and fatalities, and the symbiosis of man and machine in a relatively benign electromagnetic interference but relatively malign electromagnetic propagation environment, and overtly and covertly hostile indigenous population, was dramatic and compelling.
Clearly, unsophisticated and easily-available high-power jammers rapidly alter such situations to reduce our technological advantages. Also clear was the need to design user equipment, not just to reject interference but to minimize time and the inevitable ambiguities in actual combat situations.
• A Coast Guard lieutenant described the search-and-rescue missions he flies out of local airports to Pacific Ocean sites. Again, COTS equipment, aided by the near-ubiquity of commercial GPS equipment, along with VHF marine radio on boats and ships, enhances these mission results over those flown with standard USCG-issued navigation equipment.
• An Air Force tanker pilot major now attached to the GPS Directorate described three personal experiences. He once had to ask his boom operator to retrieve the Garmin receiver issued in the survival kit in order to navigate the tanker for rendezvous with tactical aircraft needing fuel when the tanker’s standard equipment failed.
When tasked to fly into an airport in Afghanistan with unreliable navaids, under suddenly occurring zero-zero conditions, the onboard GPS enabled him to land safely.
In a third instance in Iraq, he observed a downed airman being approached by gunmen. The gunmen with AK-47s were being targeted by drone operators. The major was able to discern that these gunmen were friendly forces moving to rescue the downed airman and avert a friendly-fire disaster. The downed airman’s ability to send his exact coordinates were key to the ability of the observer to get close enough to direct rescue efforts and to avoid a fatal error.
• A Navy surface warfare lieutenant commander and a CWO Riverine or small boat skipper cited instances in which GPS was essential to missions and ways in which user equipment design could improve their operations — for example, by making it float.
All the veterans repeated, during or after their accounts of ways in which GPS saved lives or enabled missions, “thank you for what you do,” addressed to the audience, the presenters, and their leaders. Going into denied territory places a high premium on user friendliness, battery life, robustness, size, and weight. In the future, inevitably, jam and spoof resistance will be an object of gratitude, as well.
Final Review. We all know these things, intuitively and by doctrine, but hearing reports from people in harm’s way or retrieving comrades from harm’s way was a great addition to the usual program and technology descriptions by the development teams.
I was particularly impressed with the very articulate, sophisticated, and focused presentations of these combat veterans. It is highly incumbent on the industry and the government GNSS leaders to translate these experiences into design requirements quickly, so that future systems are less dependent on individual ingenuity and on commercial gap-fillers.
Much of this progress depends on truly incorporating the applications focus of commercial product development and on use of other GNSS systems for robustness, flexibility, and affordability — often quoted as mission goals by the leaders of this enterprise.
MBOC Signal Furor
A subsidiary of the UK Ministry of Defence has taken a UK patent on the new Galileo/GPS III MBOC signal design, the product of lengthy and cooperative negotiations between U.S. and European scientists. The patent, in the names of two UK engineers who participated in the project, is being used by a legal firm to demand royalty fees from receiver manufacturers, causing considerable controversy.
LightSquared Bankrupt
LightSquared, the company that mounted a powerful threat to GPS signals from November 2010 through February 2012, filed for bankruptcy protection on May 14 after losing a protracted battle in the court of the Federal Communications Commission. The war is not over, however. Exploding sprectrum demand for mobile data use makes it likely that future challenges to GPS and GNSS spectrum will emerge.
Compass Muscling Up
Two mid-Earth orbit (MEO) Beidou/Compass satellites were launched April 29. Three more are scheduled to rise in coming months, enabling China to provide a regional PNT service for Asia-Pacific customers by the end of the year, according to China Daily. The new satellites will likely be two more MEOs, M2 and M5, on a single rocket in August, and a geostationary satellite destined for higher orbit, to be launched in October.