A new European project is researching automated collection of geodata and production of high-definition maps.
The GAMMS project is funded by the European Union Agency for the Space Programme (EUSPA), and will take place until the end of 2023. Galileo will be the main enabler of GAMMS, given its precise, multipath-resistant measurements and its upcoming high-accuracy service (HAS).
A European consortium, led by the French map service provider GEOSAT, will investigate how the combination of self-driving mapping cars (autonomous mobile-mapping systems) and artificial intelligence-based mapping software can automate the production of high-definition maps.
These maps are used by driverless vehicles and need to be provably accurate, complete and up to date. Fast, sustainable production of trustworthy maps is the goal.
Consortium members include:
GEOSAT — map-making and machine learning
GeoNumerics — multi-sensor fusion and accurate navigation
“It is as challenging as interesting to bring together the geodetic estimation methods with the navigation ones in multi-sensor systems powered by EGNSS and its differentiators, VDMs (vehicle data management systems) and visual features,” said Marta Blázquez, responsible for GAMMS at GeoNumerics. “GAMMS will boost the development of NEXA, our trajectory determination platform, and GENA, our adjustment platform for dynamic networks, in the direction of trustworthy navigation.”
GeoNumerics is responsible for computing the mapping vehicle trajectory (a time series of position, velocity and attitude coordinates) by integrating the manifold of sensors available in a mapping vehicle.
Measurements of inertial units and atomic clocks will be fused with measurements of all available navigation satellites (GPS, GLONASS, Galileo and BeiDou), odometers, cameras and laser scanners. For this purpose, GeoNumerics’ GENA and NEXA systems will be further developed to include new sensor mathematical models and to improve its robust estimation methods.
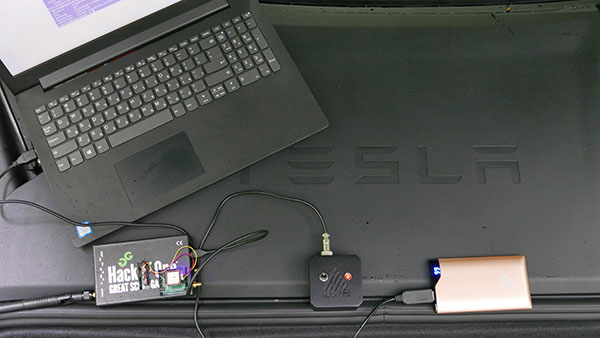
In June 2019, Regulus Cyber’s experts successfully spoofed the GPS-based navigation system of a Tesla Model 3 vehicle. This experiment provided an important warning for all companies using GNSS location and timing: these technologies, on which they depend, are highly vulnerable to spoofing attacks. In the two years since the experiment, companies and governments have continued to research the potential harm that can be caused by spoofing attacks and are learning more about how to defend themselves from them.
The Tesla experiment was groundbreaking because it was the first time that a level 2.5 autonomous vehicle was exposed to a sophisticated GPS spoofing attack and its behavior recorded.
We chose Tesla’s Model 3 because it had the most sophisticated advanced driver assistance system (ADAS) at the time, called Navigate on Autopilot (abbreviated NOA or Autopilot), which uses GPS to make several driving decisions. However, this experiment exposed several cybersecurity issues potentially affecting all vehicles relying on GPS as part of their sensor fusion for autonomous decision making.
NOA makes lane changes and takes interchange exits once a destination is determined, without requiring any confirmation by the driver. Its several other features include autonomous deceleration and acceleration according to the speed limit, autonomous lane changing, and adaptive cruise control.
These features use a variety of sensors, including cameras, radar, speedometers and more. The researchers wanted to test the extent to which the Model 3 relied on its GNSS receiver to make these driving decisions and how it behaved when receiving contradicting information from its GNSS receiver and its other sensors.
The researchers used hardware and software purchased online to mimic the tools potential hackers would use. The experiment involved two software-defined radio (SDR) devices purchased online, one to spoof GPS and one to jam all other constellations, connected to an external antenna to simulate an external attack. The software used to simulate the GPS signal was downloaded from an online source, available for free.
The test included three scenarios the researchers assumed would involve usage of GNSS, each one using a different spoofing pattern:
Scenario 1. Exiting the highway at the wrong location
Scenario 2. Enforcing an incorrect speed limit
Scenario 3. Turning into incoming traffic
A Tesla Model 3 was remotely hacked in a test of a GPS spoofing attack. (Photo: Regulus Cyber)
Scenario 1: Exiting the Highway at the Wrong Location
The car was driving normally at a constant speed of 95 KPH with NOA enabled. The destination determined for this ride was a town nearby and the car designated a certain interchange as the destination for an autonomous exit maneuver. The experiment began 2.5 km before the vehicle reached that interchange; however, the researchers’ fake GPS signal resulted in coordinates of a location on the same highway but only 150 m before the exit.
As soon as its GNSS receiver was spoofed, the car assumed that it had reached the correct exit and began to maneuver to the right, activating the blinker, slowing down, turning the wheel, and crossing a dotted white line to its right side, exiting to an emergency pit-stop, confusing it with the exit 2.5 km ahead.
To be clear, this would not have happened at any location along the highway, because sensor fusion with the radar and the camera enables the car to avoid physical obstacles and ensures that it does not cross a solid white line that makes a turn illegal.
The spoofing attack succeeded, in that it enabled the attacker to remotely manipulate the car’s sensor fusion and make it exit the highway at the wrong location.
Scenario 2: Enforcing an Incorrect Speed Limit
The car was driving to a random city far away on a highway, at a constant speed of 90 KPH, which was 10 KPH below the highway’s speed limit, with NOA enabled. The researchers generated a fake GPS signal, with the coordinates of a nearby town road that has a speed limit of 33 KPH. Shortly thereafter, the vehicle assumed the speed limit had just changed to 33 KPH and instantly began decelerating. Each time the driver attempted to accelerate using the gas pedal, as soon as he lifted his foot off the pedal the car engaged in heavy braking to quickly decelerate back to 33 KPH.
To be clear, this would not have happened if NOA had been turned off. The cruise mode can be disabled by either using the touch screen or by pressing the brakes, which would allow the driver to regain full manual control over the vehicle’s speed.
Again, the spoofing attack succeeded, in that it allowed the attacker to remotely manipulate the car’s speed and made it enforce a speed limit much lower than the actual one on the highway.
Scenario 3: Turning into Incoming Traffic
The car was being driven manually on a two-lane road with one lane in each direction, the type of road on which NOA cannot be used. The researchers generated a fake GPS signal, with coordinates of a nearby three-lane highway, with all lanes in the same direction. Furthermore, the spoofed location was 150 m from a designated exit that the vehicle’s navigation system was programmed to take, requiring a left turn.
Shortly after the car’s GNSS receiver was spoofed, the vehicle assumed it was on a highway and engaged NOA. Next, it triggered the exit maneuver, which began with activating the left blinker, followed by turning the wheel to the left. The driver had to quickly grab the wheel and manually drive the car back to its lane to avoid a collision with oncoming traffic.
To be clear, this kind of scenario would not be possible without the driver enabling the NOA. Once a Tesla driver enables NOA, it automatically turns on once the vehicle is on the highway with a set destination. This is why the researchers assumed that NOA would be turned on by default, and as long as NOA is activated, the vehicle is susceptible to the attacks mentioned in the experiment.
Once again, the spoofing attack was successful in that it enabled the attacker to remotely steer the vehicle into the opposing lane, placing it on a direct collision course with oncoming traffic. Out of the three scenarios described, this one proved that GNSS spoofing can endanger lives.
The hardware used for the GPS spoofing test. (Photo: Regulus Cyber)
GPS Cybersecurity for Automotive Applications
The NOA system in the Tesla Model 3, being an ADAS, allows drivers to rely on the car and its sensors for basic driving functions. Therefore, it enables drivers to briefly take their hands off the wheel and reduces the number of actions they are required to take. Nevertheless, drivers are still required to be fully attentive to the road so that they can take control of the vehicle at any time.
However, since this spoofing attack had such a sudden and instant impact on the car’s driving behavior, a driver who is not fully attentive and aware would not be prepared to quickly take control and prevent an accident. By the time the driver notices that something is wrong and reacts, it might be too late to prevent an accident. Already drivers have been found sleeping at the wheel, driving under the influence of alcohol, and doing other inappropriate tasks with NOA engaged.
Furthermore, this situation assumes a level 2.5 autonomous vehicle as was tested. But what happens in level 3 vehicles, in which driver engagement is limited, or level 4 and 5, in which driver response is non-existent? This research provides us with a glimpse into the crucial importance of sensor cybersecurity and particularly of GNSS cybersecurity.
The Tesla hack experiment and its results were eye-opening for the autonomous vehicles sector – the danger is real and rising as more and more vehicles are depending on GNSS technology as part of their sensors for assisted or automated driving. Up to 97% of new vehicles since 2019 incorporate GNSS receivers and most if not all are still vulnerable to the same spoofing attacks presented in this research.
In January 2021, the UN’s World Forum for Harmonization of Vehicle Regulations (WP.29) issued Regulation No. 155, which sets guidelines for cybersecurity in the automotive industry with the goal of addressing every possible cyber threat that it might encounter. Annex 5 of the regulation defines cyber attacks and states that in order to get approvals in the future vehicle manufacturers will need to provide solid evidence that their vehicles are sufficiently protected against them.
Among the cyber threats mentioned in the Annex is spoofing of data received by the vehicle — both sybil spoofing attacks and spoofing of messages. The Annex also lists the appropriate protection that vehicle manufacturers should implement and states that vehicle manufacturers will be required to provide evidence of the effectiveness of the mitigation measures they choose. These upcoming regulatory requirements can make the difference between life and death in situations caused by GNSS spoofing and ensure that only reliable and resilient positioning is used within vehicles, both today and in the future.
Please note: Tesla released a statement saying that it is “taking steps to introduce safeguards in the future which we believe will make our products more secure against these kinds of attacks.” Regulus Cyber researchers did not perform any further experiments with Tesla Model 3 since this research was published two years ago.
See the Tesla GPS spoofing experiment from the driver’s point of view:
NV5 Geospatial has acquired the new Riegl VMX-2HA dual-scanner mobile mapping system. The system will initially deploy in utility and transportation projects and enable NV5 Geospatial to collect highly accurate, feature-rich data at highway speeds.
The flexibility, ease of setup, and smaller footprint will also allow the use of the VMX-2HA on various platforms, including boats, all-terrain vehicles and trains.
The VMX-2HA delivers mobile point clouds at a resolution of 1,000 to 4,000 points per square meter (pops) and 0.08-foot vertical accuracy in terms of 95% confidence intervals. It also features a high-speed 10 GigE link, which supports reliable data acquisition of up to 2 million measurements per second and image data from all integrated cameras.
NV5 Geospatial will launch the VMX-2HA as part of a mapping project for a large U.S. utility company and implement it for work being done for the U.S. Department of Transportation.
A roundup of recent products in the GNSS and inertial positioning industry from the July 2021 issue of GPS World magazine.
OEM
GNSS/INS Sensors
Photo: Septentrio
Five receivers in new product line
The AsteRx-i3 product family provides an array of next-generation receivers, from plug-and-play navigation solutions to feature-rich receivers with raw measurement access. Included are OEM boards and ruggedized receivers enclosed in a waterproof IP68 housing. The Pro receivers offer high accuracy positioning with 3D orientation and dead-reckoning for plug-and-play integrations. Pro+ receivers provide integrated positioning and orientation along with raw measurements, in single- or dual-antenna configurations, suitable for applications with sensor fusion. One of the receivers offers an off-board inertial measurement unit (IMU), which can be mounted exactly at the alignment point of interest.
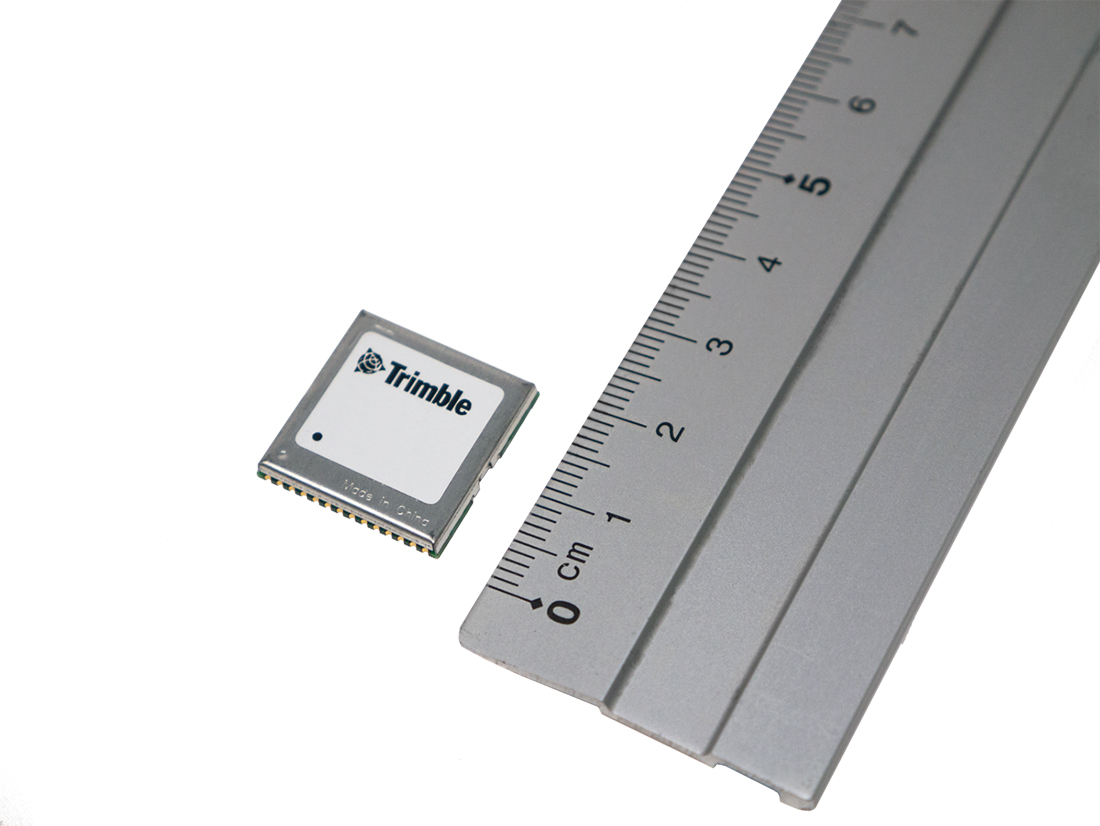
The RES 720 GNSS dual-frequency embedded timing module provides next-generation networks with 5-nanosecond accuracy. It uses L1 and L5 GNSS signals to provide superior protection to jamming and spoofing, mitigates multipath in harsh environments, and adds security features to make it suitable for resilient networks. At 19 x 19 millimeters, the RES 720 is suitable for 5G Open Radio Access Networks (RAN)/XHaul, smart grids, data centers, industrial automation and satellite communication networks, as well as calibration services and perimeter monitoring applications.
The new HG1125 and HG1126 IMUs are low-cost inertial measurement units that serve both commercial and military applications. They use sensors based on micro-electromechanical systems (MEMS) technology to precisely measure motion. They can survive shocks up to 40,000 G-force. The HG1125 and HG1126 can be used for a variety of defense and commercial applications, such as tactical military needs, drilling, unmanned aerial vehicles or navigation systems for general aviation aircraft.
The SDI170 quartz MEMS tactical-grade IMU is designed as a form-, fit- and function-compatible replacement for the HG1700-AG58 ring-laser gyroscope (RLG) IMU, but with superior overall performance, versatility and a significantly higher mean time between failures (MTBF) rating over ruggedized environments. The SDI170 IMU delivers highly linear accelerometer performance and longer life compared to the HG1700 IMU.
The OSA 5405-MB is a compact outdoor precision time protocol (PTP) grandmaster clock with a multi-band GNSS receiver and an integrated antenna. It ensures timing accuracy by eliminating the impact of ionospheric delay variation, enabling communication service providers and enterprises to deliver the nanosecond precision needed for 5G fronthaul and other time-sensitive applications. A multi-constellation GNSS receiver and antenna enable the OSA 5405-MB to meet PRTC-B accuracy requirements (+/–40 nanoseconds) even in challenging conditions. It receives GNSS signals in two frequency bands, using the differences between them to calculate and compensate for ionospheric delay variation. The OSA 5405-MB is resilient against jamming and spoofing, considered critical for 5G synchronization. It can work with up to four GNSS constellations concurrently (GPS, Galileo, GLONASS and BeiDou).
The Toughbook S1 is a fully rugged 7-inch Android tablet for capturing and accessing critical information in the field. GPS and LTE come optionally. The tablet is supported by Productivity+, a comprehensive Android ecosystem that enables customers to develop, deploy and sustain the Android OS environment in the enterprise. The Toughbook S1 tablet’s compact, rugged and lightweight body is made for portability and reliability for field workers. It has a 14-hour battery life and warm swap battery. Features include a sleek outdoor-readable anti-reflection screen, patented rain mode and multi-touch performance whether using a stylus, finger or glove.
The AGS-2 and AGM-1 are manual guidance and autosteering receivers. Location data enable crop optimization, including soil preparation, seeding, crop care and harvesting. Designed to suit virtually any agricultural machine type, make and model, the AGS-2 receiver and steering controller combines steering with network reception and tracking. It comes standard with DGNSS correction services and is upgradeable using NTRIP and an optional RTK radio in the Topcon CL-55 cloud connectivity device. The AGM-1 is offered as an economical entry-level manual-guidance receiver.
Provides fast data processing for construction and surveying
The Trimble T100 high-performance tablet is suitable for both experienced and novice users. It is optimized for Trimble Siteworks Software and supporting office applications such as Trimble Business Center. Its accessories are designed to complement user workflows, enabling users to complete quality assurance and quality control before leaving the field. The tablet is designed to be flexible and usable in a variety of configurations and job sites. It is engineered to be ergonomic and portable on and off the pole. Features include a 10-inch (25.4 cm) sunlight-readable touchscreen display, a directional keypad with programmable function keys and a 92-Wh internal battery.
Surfer has new gridding, contouring and surface mapping software to make it easier for users to visualize, display and analyze complex 3D data. Surfer enables users to model data sets, apply an array of advanced analytics tools, and graphically communicate the results. The scientific modeling package is used in oil and gas exploration, environmental consulting, mining, engineering and geospatial projects. Enhancements have been made to 3D Base Maps, Contour Volume/Area Calculation, 3D PDF Exporting Options and automated features for creation of scripts and workflows.
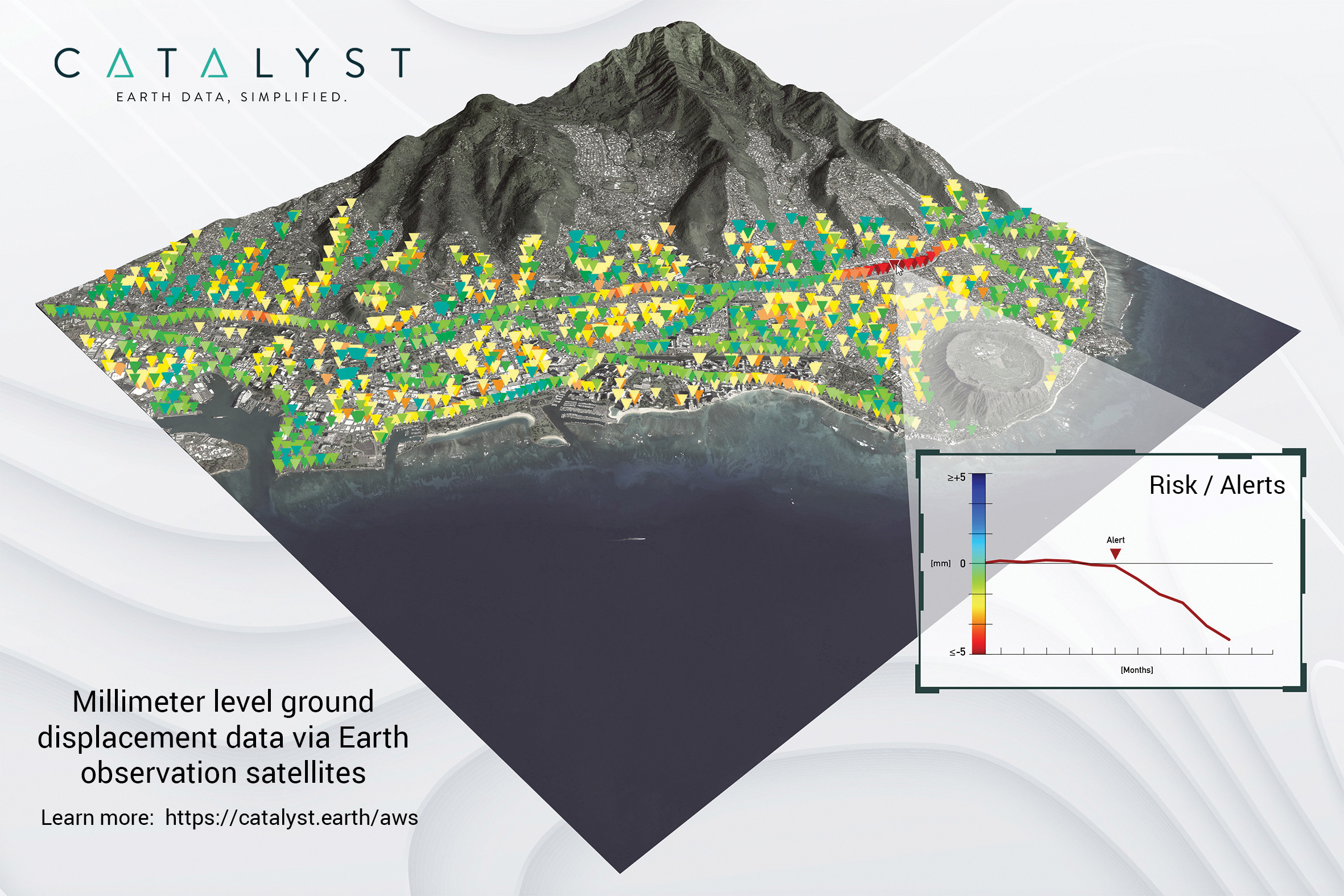
A Catalyst-AWS collaboration delivers actionable geoscience analytics to users, providing satellite-based Earth observation intelligence. The data and analytics are delivered via Amazon Web Services (AWS) Cloud. Catalyst is a PCI Geomatics brand. The initial solution, available through AWS Data Exchange, is an infrastructure risk-assessment service that uses satellite data to continuously monitor millimeter-level ground displacement over a subscriber’s area of interest anywhere on Earth. Catalyst is exploring additional risk mitigation solutions and monitoring services using AWS. Having image processing science and imagery on the cloud reduces latency and costly data transfers.
The GPS-aided INS-U is a fully integrated attitude and heading reference system (AHRS), IMU and air-data computer high-performance strapdown system that determines position, navigation and timing information for any device on which it is mounted. The INS-U uses a single antenna, multi-constellation u-blox GNSS receiver. With access to GPS, GLONASS, Galileo, QZSS and BeiDou, the INS-U can be used in a variety of GPS-enabled environments and is protected against spoofing and jamming. The INS-U has two barometers, a miniature gyro-compensated fluxgate compass, and tri-axis temperature-calibrated advanced MEMS accelerometers and gyroscopes. These high-performance sensors, along with Inertial Labs’ new on-board sensor-fusion filter, and state-of-the-art guidance and navigation algorithms, provide accurate position, velocity and orientation of the device under measurement.
The Reach M+ and Reach M2 positioning modules for UAV mapping provide centimeter-level accuracy in real-time kinematic (RTK) and post-processed kinematic (PPK) modes, enabling precise UAV mapping with fewer ground control points. The Reach M+ single-band receiver has a baseline up to 20 kilometers in PPK. The Reach M2 is a multi-band receiver with a baseline up to 100 kilometers in PPK. Reach connects directly to a camera’s hot-shoe port and is synced with the shutter. Time and coordinates of each photo are logged with a resolution of less than a microsecond. Reach captures flash sync pulses with sub-microsecond resolution and stores them in a raw data RINEX log in the internal memory. This method allows ground control points to be used only to check accuracy.
System simplifies drone inspection missions, deliveries
The Dronehub is an automated solution that can provide undisturbed drone service 24/7 in nearly any weather condition. With the integration of IBM artificial intelligence technology, Dronehub solutions can operate and automatically provide information with little human interaction. The system includes the drone and a docking station with automatic battery replacement. It can fly for 45 minutes in +/–45° C weather, up to 35 km in winds up to 15 m/s. It can carry a payload up to 5 kg as far as 15 km. It can be used for monitoring, inspection and measurement; cargo transport and parcel deliveries; and mobile ground infrastructure; and security.
The Propeller Platform and WingtraOne drone package enable construction professionals to collect survey-grade data across the worksite consistently and accurately. To operate, surveyors place Propeller AeroPoints (smart ground-control points) on their worksite, and then fly the WingtraOne drone to collect worksite survey data. Survey images are uploaded to Propeller’s cloud-based platform, where the fully automated geotagging and photogrammetry processing is completed within 24 hours of submission on the platform. Uses include mines, road and railway projects, highways and industrial complexes. Data collection with AeroPoints and Propeller PPK can serve as a reliable, single source for survey data and progress. Teams across the entire worksite can view geographically accurate and realistic 3D site models and track, inspect and report on job progress and productivity safely and accurately.
Stamp-sized module provides RTK positioning and heading
The PX1122R is a high-performance multi-band quad-GNSS real-time kinematic (RTK) receiver featuring 1 cm + 1 ppm position accuracy and under 10-second RTK convergence. It has a 12 x 16 millimeter form factor, about the size of a postage stamp. It can be configured for a base or a rover, and supports a moving base RTK for precision heading applications. The PX1122R has a maximum quad-GNSS RTK update rate of 10 Hz, providing a quick response time and more stable performance for fast-moving precision guidance applications.
Utilizing both L1 and L5 GPS frequencies, along with multi-constellation support (GPS, Galileo, GLONASS and BeiDou), the MSC 10 marine satellite compass provides precise positioning and heading accuracy within 2 degrees. Its 10-Hz position update rate delivers detailed tracking information. It eliminates magnetic interference, which can degrade heading accuracy. The MSC 10 is easy to install and can be used as the primary position and heading sensor across multiple systems, including autopilots. If the satellite signal is lost, it will transition from GPS-based to a backup magnetometer-based heading.
A roundup of recent products in the GNSS and inertial positioning industry from the August 2021 issue of GPS World magazine.
OEM
GNSS board
Photo: Javad GNSS
With GLONASS dynamic calibration
The TRE-3S GNSS board measures 100 x 80 mm, weighs 87 g and tracks 874 channels with all-in-view satellite tracking. It includes numerous features to protect against interference and improve signal output: spectrum data output, spoofing detection, advanced multipath reduction, in-band interference rejection, GLONASS 0.2-mm dynamic calibration, heading determination, attitude determination and fast acquisition channels. The TRE-3S receives GPS L1/L2/L2C/L5; Galileo E1/E5A/E5B/AltBoc/E6; GLONASS L1/L2/L3; BeiDou B1/B1C/B2/B3; QZSS L1/L2/L5/L6 (L61/L62); and SBAS L1/L5. It has a 20-Hz update and real-time kinematic (RTK) rate for real-time positioning and raw data (code and carrier). Optional features include tracking QZSS L6 (LEX) and IRNSS L5/S-band, and a data update rate and RTK rate of 100 Hz.
For high-precision applications with L-band corrections
Photo: Maxtena
The M9HCT-A-SMA is a patented helix antenna for GNSS plus L-band corrections services, suitable for high-precision and autonomous multi-frequency applications. It provides simultaneous GNSS reception in a rugged, compact form factor. The M9HCT-A-SMA is suitable for high-precision applications such as the UAV market, where high performance and low weight are driving features in antenna selection. The active helix design features Maxtena’s patented compact and lightweight Helicore technology, which provides excellent pattern control, polarization purity and high efficiency in a compact form factor.
New eXtended Filtering (XF) is now employed in the TW3900 series of Accuntena precision antennas. The XF feature mitigates interference from all near-band signals and ensures the antenna provides the purest possible GNSS signals. The custom XF filtering has been tested to mitigate new (in Europe and Japan) and existing LTE signals, enabling the XF antennas to produce clean and pure GNSS radio frequency data. The XF models are TW3972XF, TW3972EXF, TW3972LGXF, TW3967XF and TW3967LGXF. All are triple-band antennas that support GPS/QZSS (L1/L2/L5), GLONASS (G1/G2/G3), Galileo (E1/E5ab), BeiDou (B1/B2/B2a), NavIC L5 and L-band correction services.
The iGS320 cycling computer builds on the u-blox M10 positioning platform, leveraging the M10’s ultra-low power consumption, compact size, and ability to track all four GNSS to offer endurance athletes a superior user experience. Adopting the M10 in its iGS320 cycling computer brought iGPSPORT an 80 percent increase in the power autonomy to deliver 72 hours of continuous tracking, up from 40 hours in their previous device. Concurrent reception of up to four GNSS constellations increases coverage and accuracy in otherwise challenging signal environments.
The Beamo 3D mapping platform enables surveyors to scan a project site and immediately collaborate with teams in the field without lengthy delays or cumbersome equipment. The digital twin created in the platform provides a single and secure source of truth for teams without requiring highly technical knowledge. With a 360-degree camera, surveyor teams can create detailed digital environments that remote teams can use to track progress, collaborate with coworkers, and take accurate measurements without having to physically visit the site.
The Triumph-3 receiver tracks efficiently even in difficult conditions. It can track all current signals and is ready for future satellites. The Triumph-3 can operate as a base together with Triumph-LS and Triumph-LS Plus to efficiently accomplish any geodetic job. Its RTK system communicates via integrated UHF, 4G/LTE, Wi-Fi and Bluetooth channels, and eliminates the need to subscribe to a real-time network for corrections. A powerful and reliable receiver for high-precision navigation systems, the Triumph-3 is based on the Javad GNSS 874-channel chip. It is equipped with an internal 4G/LTE/3G card and secure and accessible microSD and microSIM cards. It also supports Javad’s lift-and-tilt technology.
Eos Bridge enables almost any instrument to become iOS Bluetooth compatible. The pocket-sized device connects to instruments via Bluetooth Classic or serial port, and then transmits data to any Apple iOS device, such as iPhone or iPad, Android device or Windows mobile device. Instruments equipped with non-iOS Bluetooth can connect to Apple iOS devices using the Eos Bridge, including laser rangefinders and utility-locating instruments. Instruments whose only connectivity option is a serial port also can connect, such as any instrument or sensor with an RS-232 serial port. The Eos Bridge is lightweight, at approximately 150 grams (about 5.3 ounces). It can be worn clipped to a belt, stored in a pocket, or mounted to an instrument or sensor. The battery lasts 48 to 72 hours.
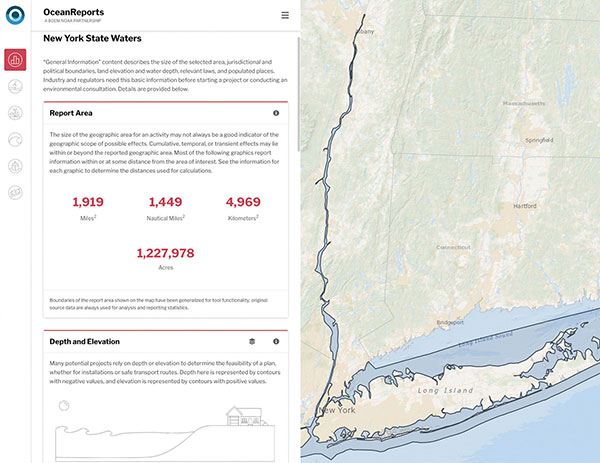
The OceanReports web tool provides users with specialized “ocean neighborhood analyses,” including maps and graphics, by analyzing more than 100 ocean datasets instantaneously. Reporting data includes information about habitats and species, industries in the area, potential hazards (such as undersea cables or shipwrecks), the economic value of ocean commerce, and other detailed oceanographic information. The web-based interactive tool for ocean mapping and planning, created by the National Oceanic and Atmospheric Administration (NOAA) and the Department of the Interior’s Bureau of Ocean Energy Management, provides professional users and the general public with opportunities to explore the ocean from their own computer.
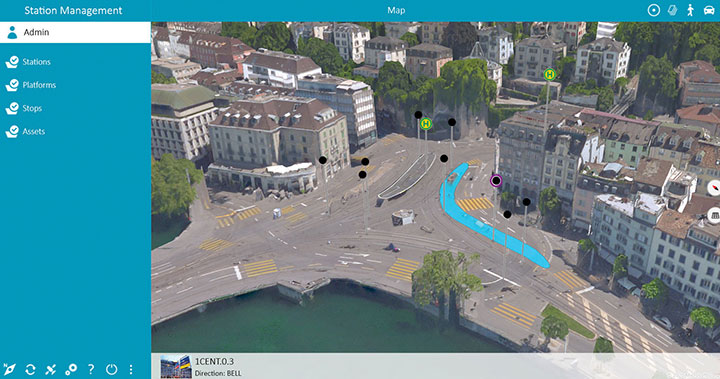
HxGN Mass Transit is a geospatial transportation infrastructure management system with 3D and AI capabilities for visualizing and analyzing transit and rail assets and operations. Built on Hexagon’s M.App Enterprise, HxGN Mass Transit provides an advanced digital twin of a city’s entire public transportation network — including tracks, stops, switches, construction sites, ticket machines, benches and garbage cans. It integrates asset and spatial data so operators can visualize and analyze an entire network with accurate and up-to-date information.
The GAJT-410MS provides anti-jamming to marine vessels. (Image: NovAtel)
The GAJT-410MS provides NovAtel’s GPS Anti-Jam Technology (GAJT) for the commercial and defense marine markets. The low SWaP variant protects civil and military operations from interference and jamming, with jammer direction-finding capabilities for enhanced situational awareness in the marine environment. The GAJT-410MS provides dynamic protection on both GPS L1 and L2 bands, as well as Galileo E1, QZSS L1 and L2, and SBAS L1 to combat intentional and unintentional interference.
The ACR 2830 GlobalFix V4 EPIRB marine distress beacon has multiple built-in redundancies to increase chances of survival in an emergency situation. The internal GPS receiver pinpoints the user’s location, which is then transmitted on the 406-MHz distress signal. In the absence of GPS-derived coordinates, the signal can be used to triangulate the position. The beacon’s 121.5 MHz homing signal will bring local search-and-rescue forces directly to the position; an LED strobe light allows them to see the position in low light. A Category 1 Emergency Position Indicating Radio Beacon (EPIRB), the GlobalFix V4 is a float-free device that will automatically activate when submerged in water. Two self-tests monitor transmission, power and battery performance as well as GPS acquisition.
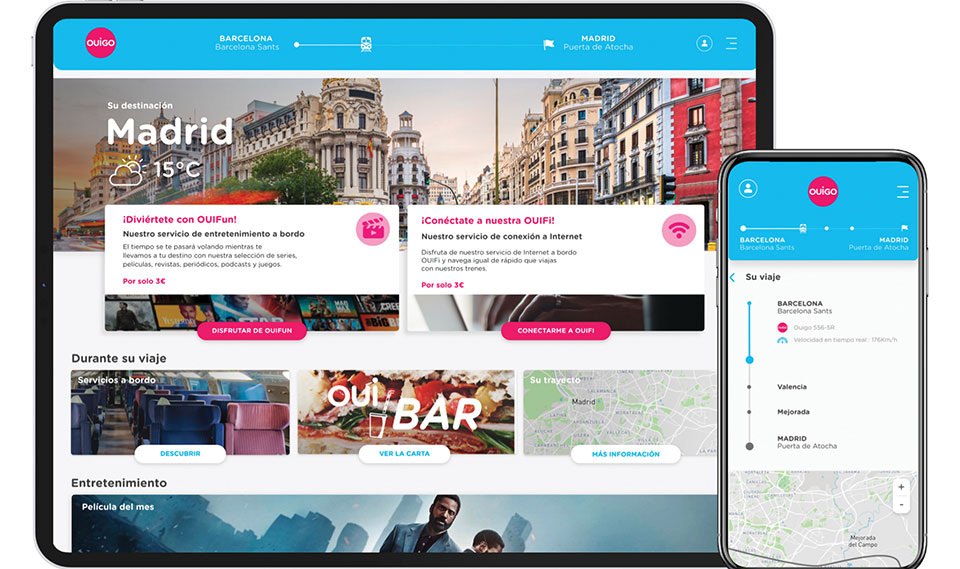
A new connected platform for rail passengers with Wi-Fi, information and entertainment content is being installed on OUIGO Spain trains through the OUIFUN portal. Passengers can connect via smartphones, tablets or PCs, access the internet on board to check email or browse the web, and enjoy entertainment content. Passengers also will be able to get travel status information in real time via an interactive map, access tourist guides or consult a menu for on-board catering. The service, provided by Moment, launched on May 10 on OUIGO’s first high-speed line in Spain connecting Madrid to Barcelona, and will gradually be extended to the whole high-speed OUIGO network.
The ANAFI Ai UAV uses 4G as its main data link between the drone and the operator. The 4G link improves data transmission and enables precise control at any distance. For BVLOS flights, it stays connected even behind obstacles. The 4G link between the drone and the user’s phone is encrypted, with a secure element protecting both software integrity and data privacy. A software development kit enables creation of custom code for flights and gives access to all sensors, including obstacle-avoidance sensors, occupancy grid and internet access.
An introductory model in Sony’s new Airpeak line, the small S1 drone can be equipped with the company’s full-size mirrorless interchangeable-lens Alpha camera. Its proprietary motor, propeller, control system and sensing technology allow it to fly at high speed (a maximum speed of 55 mph) with stable wind resistance. Propulsion technology using a combination of devices developed by Sony provides wind resistance in strong wind speeds up to 44.7 mph. The Airpeak S1 includes obstacle detection, automatic flight control via sensing, and increased safety via cloud management of the aircraft.
At 80 grams, George is a low SWaP certifiable solution for enterprise operations and those wishing to type certify their UAS. Built around the open-source autopilot Cube from CubePilot, George combines Cube with Design Assurance Level C (DAL-C) hardware and safety and sensor monitoring, enabling customers to meet the type certification and safety case requirements for BVLOS operations. Its triple-redundant IMU includes three accelerometers, three gyroscopes, three magnetometers and three barometers. The hardware platform is designed and built to RTCA DO-254 DAL-C and meets rigorous DO-160G and MIL-810H power and environmental qualifications.
SkyTraq Technology Inc. has launched a GNSS/inertial measurement unit (IMU) suitable for both automotive pre-installation and aftermarket.
The robust PX1120D dead-reckoning module integrates a 6-axis IMU and a concurrent quad-GNSS chipset, forming a sensor-fusion solution that maximizes positioning accuracy even in challenging environments. The PX1120D receives concurrent GPS/GLONASS/Galileo/Beidou/QZSS signals.
For automotive pre-installation applications where vehicle wheel-tick signals are available, the PX1120D provides wheel-tick sensor fusion with automotive dead-reckoning. In aftermarket applications where wheel-tick signals are unavailable, the PX1120D provides an untethered dead-reckoning sensor-fusion solution.
A single PX1120D module provides both automotive and untethered dead-reckoning functionality, simplifying logistics. The PX1120D provides 100% position coverage. It is suitable for infotainment systems, telematics control units, vehicle tracking, and advanced driver-assistance systems (ADAS) applications that require the highest performance and reliability, as well as uninterrupted positioning.
The PX1120D supports flexible mounting in any orientation. Its auto-calibration feature simplifies the installation procedure.
The 12 x 16 mm PX1120D offers continuous navigation in tunnels and underground parking lots. It can output attitude, gyroscope and accelerometer sensor data, making it useful for black-box driver behavior monitoring and insurance accident reconstruction.
The PX1120D uses an AEC-Q100 qualified chipset and is manufactured in ISO/TS-16949 certified plants. An engineering sample, evaluation kit and datasheet will be available by the end of August. Volume delivery to customers begins in the fourth quarter of this year.
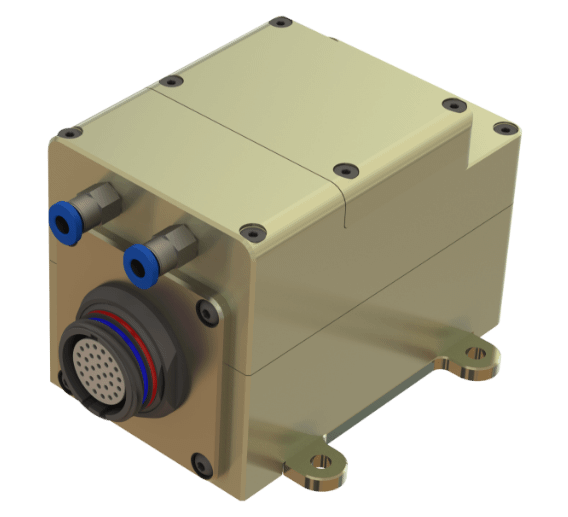
UNMANNED SOLUTION, a South-Korean company based in Seoul, develops autonomous vehicles, including driverless shuttles, autonomous agricultural equipment, robots, and educational platforms. (Image: SBG Systems)
What is complementary / alternative positioning, navigation, and timing (PNT)? In this month’s cover story, five of our marketing partners share their perspective on this question and explain how their products address it.
The four global navigation satellite systems (GNSS), two regional navigation satellite systems and public and private augmentation services continue to provide exceptional levels of accuracy and reliability for positioning, navigation and timing (PNT). Yet their well-known vulnerabilities also continue to fuel the need for alternative/complementary sources of PNT data, especially for new and rapidly expanding user segments such as autonomous vehicles.
What constitutes a complementary service to GNSS for PNT and what constitutes a true alternative is partly a matter of definition and opinion. In a January report, the U.S. Department of Transportation stated
…suitable and mature technologies are available to owners and operators of critical infrastructure to access complementary PNT services as a backup to GPS. To achieve the parallel objective of resilience, as described in Executive Order (EO) 13905, that path should involve a plurality of diverse PNT technologies. Promoting critical infrastructure owner/operator use of those technologies that show strong performance, operational diversity, operational readiness, and cost-effectiveness is worthwhile. Based on this demonstration, those technologies are LF and UHF terrestrial and L-band satellite broadcasts for PNT functions with supporting fiber optic time services to transmitters/control segments. (Andrew Hansen et al., Complementary PNT and GPS Backup Technologies Demonstration Report, prepared for the Office of the Assistant Secretary for Research and Technology, Department of Transportation, January 2021, p. 195.)
A portion of the former USCG Loran Support Unit in Wildwood, New Jersey, with its iconic Loran antenna. (Image: UrsaNav, Inc)
For this year’s Q&A on complementary / alternative PNT, I asked five companies in the GNSS/PNT space to tell us how they define the issue, what solutions they prioritize, what markets they target, and which of their products specifically address the need to make PNT more resilient.
Roger Hart: The deep adoption of the state-sponsored, space-based global navigation satellite systems (GNSS) defines them as the primary PNT source at this time. Inertial navigation, long predating GNSS, does provide an independent navigation solution but does not provide time. In today’s conversation, alternative PNT generally refers to deriving position and timing from existing signals not purposed for navigation, to ground-based location systems, and also to emerging satellite systems that operate at higher power — or out of the GNSS band — to provide a diversity of PNT sources.
David Sohn: Simply put, alternative PNT is usually anything that is not GNSS. So, this includes PNT derived from low Earth orbit (LEO) satellites; vision, radar, lidar combined with inertial measurement units (IMUs) and map matching; positioning off cellular WiFi, digital TV signals and other signals of opportunity; legacy nav aids like VORTAC, ILS, DME and eLoran; and new dedicated infrastructure positioning systems like Locata, NextNav or RFID.
Matthieu Noko: Here at SBG Systems, for 15 years we have been developing navigation systems based on smart coupling of GNSS technology and inertial sensors. From our perspective, inertial sensors as well as sensors such as odometers or DVL, combined with high-end algorithms and RAIM, build consistent alternatives to GNSS-only systems in the vast majority of outdoor applications. Inertial sensors dramatically enhance GNSS-only navigation systems, making it possible to provide navigational data during GNSS outages in urban environments or to reject false GNSS measurements due to multipath effects.
As its entry into the driverless category of the Formula Student Germany car race, AMZ modified the car it has used in competition since 2015 to be driverless. (Image: SBG Systems)
The hybridization of several technologies makes it possible to reach a sufficient reliability level for the majority of commercial applications. However, in some indoor applications or in case of intentional jamming or spoofing, a higher resiliency is required. Using visual odometry can then complement quite effectively the navigation system, although this technology is still at a research level. Compared to infrastructure-based alternative PNTs — such as WiFi, Bluetooth or ultra wideband (UWB) ranging — visual odometry has the great advantage of not requiring any infrastructure.
Jacob Amacker: GNSS remains the dominant method of PNT in terms of market applicability and performance, but there are many rival technologies that have great potential and will compete with GNSS going into the future. The most important changes in PNT will be methods of position localization that are able to replace GNSS, and we will likely see these technologies integrated into huge systems, making use of ubiquitous technologies such as lidar. Whereas GNSS still provides the most accurate timing, as systems get more complex, time synchronization becomes a bigger issue, so different methods of this need to be explored.
There are many ways of improving the navigation data overall. Most commonly an IMU and a Kalman filter will be employed to stabilize any errors in the position localization method. A Kalman filter is a method of processing data from a range of sources—say, GNSS, an IMU, and a wheel speed sensor—and using them in such a way as to arrive at the position with a greater accuracy and precision than either source alone would be able to achieve. This process, however, requires precise timing for each data stream. Therefore, one area in which alternative PNT has to compete with GNSS is timing precision. GNSS makes use of atomic clocks used on satellites that are as accurate as you will get. There are also several ways of synchronizing time. A timing system can only be as precise as the most precise clock on the network, but there have been developments, such as Precision Time Protocol (PTP) that can synchronize timings across a network of clocks over Ethernet connections. Traditionally, PPS has been used and whereas this is still very precise it is not able to compete with PTP on convenience or sophistication.
Charles Schue: The common definition these days for “alternative PNT” seems to be with respect to, or as compared to, GPS or GNSS. Even the U.S. DOT’s website speaks to PNT as related to GPS.
I used alternative, complementary and backup somewhat interchangeably during my entire career with the U.S. Coast Guard. In recent years, I injected “co-primary” into the conversation as well. Prior to GNSS becoming ubiquitous, alternative, complementary and backup were not technology-based terms, but were instead operationally based. For example, “the prudent mariner” or “the prudent aviator” should use all means at their disposal to safely navigate their platform. For the navigator, this would include visual, audible and electronic signals or aids. The solution of choice obviously was the one that provided the highest accuracy, availability, integrity and continuity. However, prudence required always checking the solution of choice against other readily available alternatives, preferably that complemented each other, to ensure safety and continuity of operations. At one time, shipboard navigators might have at their disposal Loran-C, OMEGA, GPS, INS, radar, sextant, visual bearings (such as lights and landmarks), beacons, and soundings. Similar alternatives were available on aircraft.
Although always in the mix, timing was often in the background until around 2000. Then it started to become as important as positioning and, in many areas, even more important than positioning. Today’s incredible dependence on technology, and interdependence between technologies, means that knowing your “when” has become as important as knowing your “where”.
Whatever the terminology, the definition of alternative PNT should include some key features. Firstly, we should accept that the solution of choice today is GNSS, and we should define it as primary or co-primary. Next, we should acknowledge that when the primary solution is available and trustworthy, it should always be used, or at least considered. Finally, the primary solution should continually be compared with alternatives to ensure safe and secure provision of PNT to the user. Thus, an alternative PNT solution is one that is readily available; provides an easy and seamless transition to/from the primary or other alternatives; allows continuity of operation at a possibly degraded, yet usable, level of accuracy, availability, integrity or continuity; and is dissimilar enough from alternatives to withstand the effects that might be affecting the primary solution.
Do you agree with the U.S. DOT’s assessment, cited above, of what it will take to make the national PNT much more resilient and reliable? If you do, how do your offerings fit into that framework?
RH: While there are intricate differences in the signals generated by the primary PNT systems, they are all quite similar in terms of frequency and power and are all vulnerable to the same types of interference. Achieving the most resilient solutions will require the use of alternative RF bands and non-RF sources. Having a variety of alternative PNT sources will allow users to integrate the method most applicable to their platform constraints. Integration across the various PNT sources will need time synchronization to take full advantage of the alternate PNT systems. Our offerings work concurrently with GNSS, providing simulation and testing of GNSS and alternative PNT as true complements, while also offering the ability to measure timing accuracy in real time.
DS: Yes, we agree with the DOT’s assessment. However, to be clear, the DOT does not require “LF and UHF terrestrial and L-band satellite broadcasts for PNT functions with supporting fiber-optic time services to transmitters/control segments.” It stated that to achieve resilience, systems “…should involve a plurality of diverse PNT technologies…that show strong performance, operational diversity, operational readiness and cost-effectiveness.” Their demonstrations showed that those technologies they called out meet these criteria. Our solutions have been leading this resilient approach by offering several diverse, alternative PNT references.
We have fielded time-server equipment that operates from both GNSS and eLoran. Our standard offering time servers are equipped with multiple references from GNSS, network-based time services from NTP, PTP and PTP WR; internal references from disciplined atomic clocks; wireline references from IRIG, 1PPS or ASCII time code; and LEO PNT reference from the STL signal.
(Image: SimonSkafar_E+_Getty Images)
L-band or more generally the use of geostationary satellites was until very recently the only communication link for PNT augmentation services, although these signals are weak and easily disturbed or masked, especially at high latitudes. Resilient navigation will clearly need to allow multiple downlinks for corrections such as terrestrial networks (4G/5G) or satellite-based internet. In the mid-term, we expect the correction delivery over IP to become the standard, and L-band corrections to be used as a backup only. All our high-performance products already include an NTRIP client able to handle the IP corrections very easily.
JA: This is certainly one option. Largely, it is borne out of a need to compensate for the disadvantages of GNSS. This larger range of frequencies would provide a range of satellite-borne signals that have different penetration characteristics and information carrying properties but the same core purpose. Therefore, somebody making use of such a system will be better able to receive these signals even when under obstructions. Of course, some obstructions will still be impenetrable to GNSS signals and there is a long way to go to developing a comprehensive solution that can deal with timing differences when the signals travel through objects. It is likely that some other source of timing information, for example through the proposed fiber-optic services, will be necessary to smooth out these issues. Although we will see this much-needed upgrade to cover the shortfalls of GNSS employed, many other alternatives will start to take prominence. It is difficult to say which solution will win out, and it is likely that an upgraded GNSS will continue to dominate for the next decade or two at least. In terms of our offerings, we are exploring all possibilities and keep our core technology open to any position localization method. Of course, we will welcome any new technology that is a viable and improved method of PNT.
CS: I have long been an advocate of a system-of-systems approach simply because there is no PNT solution available yet that works everywhere, under all conditions, for all users, all the time. Many solutions provide only a component of PNT: an INS provides position (the “PN”), and an atomic clock provides time (the “T”). However, an INS does not know “where” it is without initialization and updates, and an atomic clock does not know “when” it is without initialization and updates. Fiber is awesome but is not wireless. Many alternatives depend upon GPS/GNSS as a necessary input. Others are augmentations that depend upon GPS/GNSS as inputs and not direct alternatives, such as space-based or land-based augmentation systems. Some are mode-dependent — such as VOR, DME, ILS, and TACAN for aviators — and thus not useful to other modes: time/frequency, maritime, land-mobile or handheld.
So, yes, we agree with the government’s assessment that low-frequency (LF), generally referring to eLoran in the United States, is the best, very wide area, terrestrial, wireless alternative, and is an essential component of any resilient PNT framework. Irrespective of whether the implementation is Loran-C, eLoran or LFPhoenix, LF is the lowest cost terrestrial PNT solution per million square miles of coverage. All our offerings are focused on the LF portion of the resilience framework. Our offerings easily integrate with any existing PNT technology and have proven in real-world government testing their ability to survive heavy jamming and spoofing environments.
What markets and applications do you target?
RH: Spirent Federal provides simulation test solutions to U.S. government and affiliated organizations. Applications range from core GNSS receiver development to real-time, hardware-in-the-loop system integrations. We have a long history of supplying the U.S. government and contractors with first-to-market products, from Y-code, SAASM, inertial and M-code, to sensor fusion of the latest alternative signals and sensors. We provide test solutions to safety-critical applications that are expected to have the same level of operational performance both in GNSS-available and GNSS-denied environments. Providing a single test platform that can help validate performance in both environments has received positive responses from users in the autonomous vehicle industry.
DS: Aerospace and defense, data-center and communication networks, public safety, industrial control, search and rescue, and space.
Autonomous self-driving mobility solutions move people and goods at appropriate speeds in urban and campus environments. (Image: SBG Systems)
MN: SBG targets a large range of applications including from a relatively small BVLOS drone for remote operation to large hydrographic vessels or airborne survey. We divide the applications into two main categories:
Surveying and mapping, where the inertial navigation system is used to stabilize the measurements from a lidar, sonar or camera to generate high-precision maps.
Control applications, where the PNT and orientation solution is used in real time to feed autopilot or to stabilize a camera. These applications include unmanned vehicles, machine control, camera pointing and more. High resilience is then critical to ensure safe navigation.
JA: Two main applications we are targeting with alternative PNT are surveying and ADAS systems. Both of these applications often make extensive use of lidar systems. We are therefore looking at lidar-based simultaneous localization and mapping (SLAM) algorithms to aid PNT or to provide relative position localization without GNSS. In cases when GNSS is totally unavailable, it is usually possible to set up ground control points. Although these cases are limited, they give much more flexibility in options. Anticipating a future where autonomous driving is the norm and not the exception, new building projects will need to be planned with the adequate systems in place to allow for them, and this will include a system such as UWB.
CS: Our employees have been involved in the design, development, deployment or sustainment of every Loran-C and eLoran system site in the world (transmission, control or monitor) since the mid-1970s, including components of the Russian Chayka system. Our service provider and end-user technologies are operationally proven in commercial and military environments. We specifically target the maintenance and upgrade of existing systems, as well as the implementation of new systems, globally.
Which of your products directly address the need for alternative PNT?
RH: In a broad sense, Spirent offers a market-proven and innovation-driven solution portfolio for the simulation of inertial sensors through the SimINERTIAL and SimSENSOR product lines, seamlessly integrated with our GNSS simulation. Spirent is actively engaged with several alternative RF vendors to incorporate signal simulation capability and will offer an alternative RF navigation product in 2021 called SimAltNav Replay. This product will allow for concurrent GNSS and alternative RF signal simulation. Additionally, Spirent offers many other alternative PNT solutions for testing resilient systems for connected vehicles and sensor-fusion algorithms for tactical and military-grade systems. We are developing new products to incorporate an open Ethernet interface allowing for open-source Ethernet-based sensor simulation.
Remotely controlled rovers are used to test and practice complex tasks in Mars-like desert environments. (Artist’s Rendering: Stocktrek Images_Stocktrek Images_Getty Images)
DS: Our time servers are equipped with high-quality precise internal time references such as OCXOs or atomic clocks and then disciplined by external references such as GNSS. They are resilient because they can operate precisely for long periods in GNSS-denied situations as standalone devices in holdover mode or from multiple alternative references, such as:
network-based NTP, PTP and PTP WR time services
wireline references from IRIG, 1PPS or ASCII time code
LEO PNT reference from the STL signal
eLoran when available
They are also resilient because they detect and mitigate interference from the GNSS signal before it can corrupt the PNT solution.
Our GNSS simulators are adding alternative PNT features to provide a complete test and evaluation solution for resilient PNT systems. We have recently added INS/IMU test features and have integrated with Anritsu’s cellular test stations to evaluate and qualify combined GNSS/cellular location functions. Orolia GNSS simulators support generation of custom GNSS signals and playback of IQ waveforms, and provide complete toolsets for GNSS jamming and spoofing testing. This allows creation of the threat environment to allow evaluation of alternate PNT signals as backup or alternative to GNSS. Orolia offers an open-source framework allowing any end user to develop their own sensor plug-in leveraging the Skydel simulation engine.
Our Resilient PNT for Defense product line includes the VersaPNT, which uses alternate non-GNSS PNT sensors such as IMUs, barometers, wheel ticks, INS and non-GPS-based LEO satellites. Alternate RF navigation or non-GNSS sources of radio frequency (RF) are of interest in highly degraded or contested signal environments. Interest is focused on low-Earth-orbit (LEO) constellations. These systems offer high receiver signal power (relative to GNSS) and a secure and resilient link to augment GNSS.
MN: All our products are designed to answer to challenging GNSS conditions, starting with our Ellipse series, which includes an industrial-grade IMU capable of coping with short-term GNSS outages. Its miniature size allows integration in robotics and also makes it suitable for cost-sensitive applications. Our Apogee and Horizon series, with their navigation-grade IMUs, are the most resilient systems in the event of GNSS outages. These products reach very high-end performance in real time, but become exceptional when used with our post-processing software Qinertia. Tightly coupled algorithms make the solution capable of coping with long-term GNSS outages.
JA: We have previously created solutions using retroreflective strips for path following with driving robots. and we are also compatible with Locata’s system, a large infrastructure solution popular for automation in shipping ports. More recently, we have released an offering for UWB in an integration with Pozyx. This is perfect for GNSS-denied environments as a direct replacement for what GNSS can provide in terms of position information. We are also exploring alternative ways to synchronize clocks and get timing information. This year we have developed PTP functionality on all of our devices. Alternative PNT is going to be vital as we look to the future of navigation and thinking about how we can navigate flawlessly anywhere and address more complex environments, particularly urban areas.
CS: We are focused on the provision of terrestrial low-frequency equipment and systems for primary, co-primary, alternative, complementary and backup PNT. We provide all the products and services required to design, develop, install, certify, operate and maintain Loran-C, eLoran and LFPhoenix equipment and systems. We provide the technology to perform coverage diagrams and site surveys; all the equipment required at a transmission site; all the equipment required at a differential reference station or quality-of-service site; all the equipment required for a monitor and control site; ASF measurement and analysis equipment; and various models of end-user equipment (including receivers and antennas) for the timing/frequency, maritime, aviation, land-mobile and handheld markets.
Oceaneering International Inc. and DDK Positioning Limited have entered into an agreement for the provision of GNSS augmentation service and all associated software and hardware supporting Oceaneering’s C-Nav Positioning Solutions group offerings.
Oceaneering provides engineered services and products primarily to the offshore energy industry. C-Nav uses precise point positioning corrections with worldwide accuracy of better than 5 cm horizontally and 15 cm vertically.
DDK Positioning’s services are delivered through the Iridium satellite communications network coupled with hardware developed by partner Topcon. This pairing will enhance the ability of Oceaneering’s customers to precisely position their assets globally. The unified solution offers several benefits to Oceaneering’s positioning customers, such as two-way communication enabling machine control and feedback, and redundancy to cover potential signal losses.
From launch, DDK Positioning will provide its MAX service to Oceaneering clients, which can achieve accuracy to less than 10 cm (2 sigma). The MAX service uses GPS, Galileo, and GLONASS constellations with further systems to be added within a year.
“Significant advances have been made in communications infrastructure and satellite positioning technology over the last several years,” said Eric Smith, director of Survey Services at Oceaneering. “With this agreement, Oceaneering will be able to offer enhanced positioning technology allowing us to build on our strong industry track record while continuing to serve the positioning needs of our clients now and into the future.”
“We are absolutely delighted to have signed an agreement with Oceaneering to provide our precise and reliable GNSS positioning solution to Oceaneering’s customers in the maritime energy industry,” said Kevin Gaffney, CEO at DDK Positioning. “This agreement demonstrates the need for an alternative GNSS augmentation service that increases the reach of services from pole to pole, with the added benefit of Iridium’s resilience and reliability.”
Autobahn program connects new companies with major brands for investment and development, ST is first semiconductor manufacturer to become Anchor Partner
STMicroelectronics, a global semiconductor company, has become an Anchor Partner of Startup Autobahn, which is powering innovation in the automotive sector by introducing selected dynamic new companies to established technology corporations.
Startup Autobahn is based in Stuttgart, Germany. It was created by and is managed by Plug and Play, a Silicon Valley accelerator and investor that historically has introduced more than 35,000 startups to more than 400 corporations.
Anchor Partners in Startup Autobahn include major car brands and vendors of diverse automotive technologies. ST’s support, with its strategic emphasis on smart mobility, boosts opportunities for new companies with innovative ideas for electrification, e-mobility and smart, connected driving to take part in the program.
“We’re extremely pleased to welcome STMicroelectronics to our platform as a new strategic partner,” said Sascha Karimpour, managing director of Plug and Play Germany. “This partnership fits perfectly into our existing ecosystem, covering the automotive value chain. The semiconductor industry is enabling powerful innovations in automotive technology and will play a major role as software and IT become increasingly important in the car of the future.”
Startup Autobahn organizes events throughout the year to bring corporate partners and selected startups together. The diverse platforms include deep-dive presentations, one-to-one introductions, cross-collaboration days, and private meetings between partners and shortlisted startups. Twice-yearly expos showcase the results of collaborations, combined with keynote speeches and presentations from various industry leaders and invited guests.
The program has already successfully connected startups with established brands to activate powerful new concepts in areas such as battery charging, supply-chain and materials management, smart mobility, efficient manufacturing, recycling and enterprise CO2 reduction.
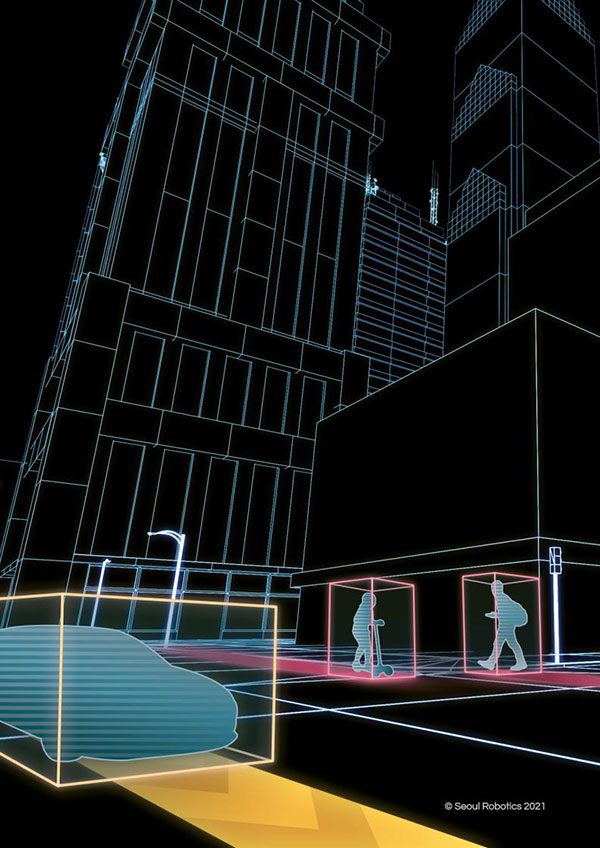
Seoul Robotics has launched Voyage, a plug-and-play lidar perception system. The all-in-one deployment kit is equipped with the company’s proprietary software SENSR2, lidar sensors and a computer.
Seoul Robotics is a 3D computer vision company using artificial intelligence (AI) and machine learning for intelligent robotic perception systems. The company’s sensor-agnostic perception software is deployed by BMW, Mercedes-Benz, the Chattanooga Department of Transportation and Emart, among others.
Seoul Robotics provides companies, institutions and governments with the software behind the sensor that enables its use in markets such as retail, smart cities and security. Voyage is designed to help organizations and communities increase efficiencies and improve safety through a cost-effective, customizable system.
The lidar market, which is on track to reach more than $3 billion by 2025, has become crowded over the past several years as the technology became synonymous with autonomous vehicles. The marketplace is flooded with companies producing sensors to fuel the demand of this industry, but most sensors on the market are sold without any intelligence, leaving companies to develop software in-house, which significantly increases the time and cost of deployment.
With Voyage, organizations are not obligated to purchase a particular sensor if it is not a fit for the solution they are deploying. Customers don’t have to worry about changing software when they change or upgrade their sensors — Voyage is a non-proprietary solution that breaks down the barriers to entry and allows for quick access to 3D vision, according to Seoul Robotics.
“First and foremost, lidar sensors do not work without sophisticated perception software. The lidar industry is investing billions of dollars on sensors without even considering the software needed to interpret the data into actionable solutions,” said HanBin Lee, CEO of Seoul Robotics. “Voyage combines analytics and sensors to bring tangible solutions to market much faster.”
Voyage provides highly accurate object detection, tracking and classification capabilities to enable a wide range of applications for smart cities, intelligent transportation systems, retail analytics, crowd monitoring and security. It fuses three cutting-edge technologies:
3D lidar sensing powered by Seoul Robotics’ proprietary software SENSR2
Edge computing for minimum data burden and ease of integration
Built-in sophisticated perception software for instantaneous analytics
Voyage provides centimeter-accurate 3D object detection, tracking, and classification in addition to volumetric profiling and motion prediction capabilities, regardless of lighting conditions, and can collect and process data from up to four sensors for seamless insights across the sensor coverage zones. As Voyage does not capture, show or store any biometric and otherwise identifying data, it aims to maximize the protection of people’s privacy when installed as part of various smart cities and security systems.
Swift Navigation is partnering with Tokyo-based KDDI Corporation, an international telecommunications company, to help bring Swift’s precise positioning technology to the Japan market. KDDI will also be a key partner in the global expansion of Skylark precise positioning service, which is now available across the continental United States and Europe in partnership with Deutsche Telekom.
Traditionally, precision GNSS corrections were provided using real-time kinematic (RTK) techniques, requiring a high density of reference stations and with limited fault tolerance. By partnering with Swift, KDDI is able to utilize Swift’s patented wide-area corrections solution, a hybrid of precise point positioning (PPP) and RTK. The solution delivers wide-area corrections with a low density of reference stations, fast convergence and centimeter-level accuracy from a reliable service delivered via the cloud.
The accuracy of the Skylark precise positioning service enables lane-level positioning at fast convergence times to achieve the levels of safety, reliability, integrity and availability required by autonomous, mass-market and mobile applications.
Skylark is GNSS hardware agnostic, giving customers a choice of which GNSS sensor they use and enabling users across industries to benefit from higher accuracy by subscribing to Skylark. With the service, automotive manufacturers can achieve lane-level accuracy in the sensor suite with high levels of integrity. Delivery companies can improve operational efficiencies and cost savings with route optimization. Mobile app companies can improve analytics using accurate data to create better maps and higher performing apps. Industrial applications can automate equipment and improve efficiency with reliably accurate positioning.
“Swift Navigation is delighted to be partnering with KDDI to expand Skylark’s precise positioning in Japan and benefit customers around the globe,” said Timothy Harris, co-founder and CEO at Swift Navigation. “KDDI has always been at the forefront of bringing innovative technological solutions to its customers, and Swift is pleased to add value to their businesses through the reliable accuracy delivered from Skylark.”
“We believe that Swift’s high-precision positioning solution further empowers our business capabilities in mobility space and contributes to the expansion of business coverage into smart vehicles,” said Hiromichi Matsuda, executive officer, Business Exploration & Development at KDDI Corp. “The accuracy afforded from precise positioning unlocks opportunities for a multitude of businesses and industries and adds value to our customers in Japan.”
Continuous accurate navigation in all environments with sensor-based spoofing detection
Photo: U-blox
U-blox is introducing a series of automotive-grade positioning modules that are operational up to 105° C (221° F). The NEO-M9L modules and the M9140-KA-DR chip are built on the robust u-blox M9 GNSS platform and use dead-reckoning techniques to provide accurate position data when satellite signals are compromised or unavailable.
The u-blox NEO-M9L-20A and NEO-M9L-01A modules, as well as the M9140-KA-DR chip, are specially designed for first-mount automotive solutions. The modules and the chip are all automotive-grade, with the NEO-M9L-01A variant offering an extended operational temperature range up to 105 °C, making it suitable for integration on the roof, behind the windscreen, or inside hot electronics control units.
Applications include integrated navigation systems such as in-vehicle infotainment (IVI) and head units, integrated telematics control units and V2X.
The modules include new-generation 6-axis inertial measurement units (IMUs) that deliver low-latency 100-Hz RAW data output. The modules offer a low-latency 50-Hz position update rate, making it suitable for use in real-time applications. The automotive dead-reckoning (ADR) output combines the GNSS fix with IMU data to deliver accurate positioning output for various scenarios.
Additional GNSS-only output enables seamless integration into a variety of third-party applications. The receiver also supports wake-on-motion, which enables smart features such as theft protection and power-efficient designs.
The modules offer innovative sensor-based spoofing detection for advanced security and robustness. The chip offers protection against possible GNSS signal spoofing, which can cause navigation systems to report faulty position data or time.
“The u-blox M9 sensor-fusion products address the latest automotive market demands for quality, reliability and robustness. Availability and trustworthiness of position output are increased by using concurrent reception of four GNSS constellations,” said Aravinthan Athmanathan, product manager, Product Center Positioning at u-blox. “In addition, the spoofing-detection feature is brought to a new level compared to the predecessor. Paired with low-latency position output, attitude, and sensor data, the u-blox NEO-M9L is ready to meet current and future challenges facing the automotive market.”
All the module variants are compliant with AEC-Q104, the latest standard for ensuring the reliability of modules used in automotive applications. Engineering samples and evaluation kits will be available by the end of September.