Oxford Technical Services (OxTS) has launched precision time protocol (PTP) master functionality on all of its next-generation inertial navigation systems (INS).
PTP is a network-based time synchronization protocol used to synchronize all clocks throughout a computer network. It is used in many industries, but most notably in finance to synchronize transactions, mobile-phone tower transmissions and subsea acoustic arrays.
Time synchronization
In many commercial organizations, millisecond-level device synchronization as offered with network time protocol (NTP) is sufficient. However, in surveying and automotive testing environments where there is more than one clock source (lidar and inertial navigation systems, or INS, for example), final results can suffer from time drift if millisecond — and not microsecond — synchronization is used.
Time drift becomes relevant as soon as you introduce more than one data acquisition system working in parallel. This is because each system will have its own timing error, and over time this error will grow and create drift.
For surveyors, time drift can negatively impact point clouds by making object recognition difficult, subsequently leading to blurring and double vision.
For automotive engineers, when running campaigns, analysis of events within your data may be misaligned, making the analysis more difficult and/or less efficient.
Stamp out time drift
To stamp out time drift, it is important to use the most accurate clock source available.
A key component of an INS is the GNSS receiver. The GNSS receiver acquires data, including timing information, directly from multiple GNSS constellations (GPS, GLONASS, BeiDou and Galileo). The GNSS receiver, coupled with the inertial measurement unit within the INS, allows users to benefit from the centimeter-level position accuracy that is so important in surveying and automotive testing environments.
These satellite systems house the most accurate time source possible — atomic clocks — meaning that devices connected to a network that includes an INS can take advantage of this time source owing to the GNSS receiver within the INS.
Simpler setup for lidar use
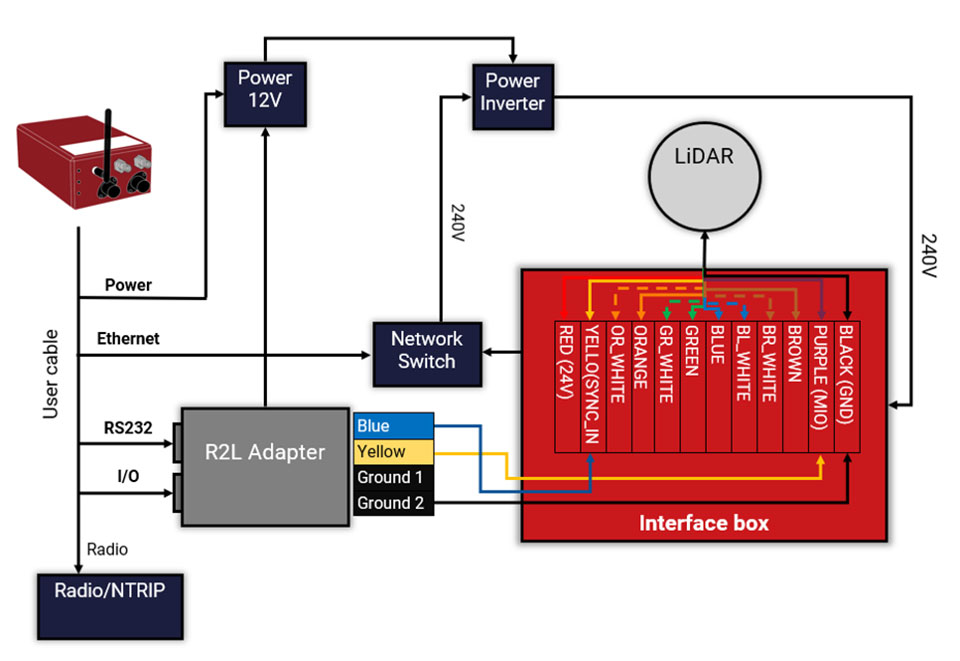
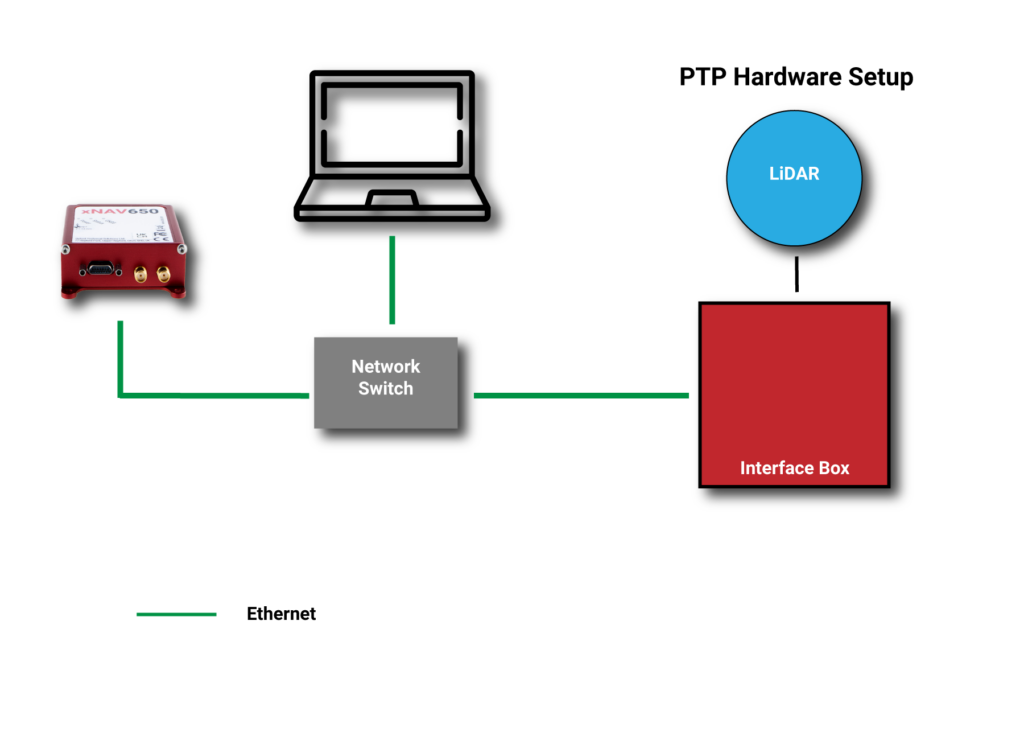
By migrating from a traditional PPS hardware set-up, which involves connecting and wiring multiple cables, to a PTP setup, which is essentially an Ethernet “plug-and-play” solution, users can also make day-to-day use of the equipment simpler and more efficient.
Without PTP – using PPS setup. (Image: OxTS)An example PPS hardware setup with a PTP-enabled network. (Image: OxTS)
This much-improved hardware setup allows surveyors and automotive test engineers to be up and running in a much shorter time frame than previously possible.
Adding value to the automotive industry
The addition of PTP also adds value for automotive users. With cars-under-test incorporating multiple sensors (lidars, cameras, etc.), synchronizing all that data can help support accurate analysis after the test is complete.
OxTS is continuing to develop its PTP solution by working on PTP slave functionality and improving the configuration process, which will provide greater flexibility in typical automotive setups that use data acquisition (DAQ) for larger sensor networks.
Summary
PTP as a time synchronization method is becoming more popular, particularly in the lidar industry, with manufacturers such as Ouster and Hesai enabling PTP on their sensors.
The shorter “time to survey” gives customers a much-enhanced user experience, and the higher quality final output on offer means that many users will demand their sensors are PTP-compatible before considering them for their projects.
Manufacturers of complimentary sensors, such as INS, need to build the capability into their product sets to allow them to be fit for the future.
Various OxTS INS are available to use PTP, including the new xNAV650, the company’s new small, lightweight and affordable INS for applications where payload size and weight matter. Learn more about the xNAV650 INS.
Users can also find out more about OxTS and its range of PTP-enabled devices by visiting its dedicated landing page, OxTS PTP-enabled INS devices.
Aceinna and Point One Navigation launch hardware and software platform for precise positioning in agriculture, construction, mapping, surveying, robotics and trucking
The OpenARC positioning service is now commercially available. OpenARC is a precise-positioning hardware and software platform for system integration of GNSS corrections with high-performance inertial navigation system (INS) and real-time kinematic (RTK) hardware.
OpenARC is offered by Aceinna, a developer of inertial-based guidance and navigation systems, and powered by Point One Navigation.
With an RTK positioning engine and GNSS corrections delivered from a ground-based network of secure base stations, OpenARC will reliably improve position accuracy for autonomous vehicles to centimeter-level accuracy. The platform combines Point One’s Polaris GNSS correction service with Aceinna’s OpenRTK330 hardware and software solution for developers of autonomous systems in trucking, precision agriculture, construction, mapping, surveying and robotics.
OpenARC provides high-precision positioning and localization applications, enabling centimeter-level accuracy for challenging tasks such as lane keeping, precision agricultural guidance, and UAV landing maneuvers.
OpenARC is integrated into the OpenRTK330LI navigation module to provide a secure, vertically integrated and easy-to-use positioning platform. OpenARC is very scalable, supporting single-unit installations and high-volume deployments.
Point One’s proprietary Polaris GNSS cloud correction service delivers superior station density in areas where operators need it the most, including urban centers and suburban surrounding areas, enabling cold convergence times of under 10 seconds.
Polaris provides continuous position monitoring and tracks all modern satellite constellations. Its base-station technology includes advanced anti-jam, interference mitigation, security and integrity monitoring. Its architecture allows for GNSS corrections in RTK or state space representation (SSR) configuration. Its open-source interfaces are compatible with multiple receivers and chipsets, and the service is compatible with any NTRIP/RTCM3 compliant receiver.
Murata has developed a new (micro-electro-mechanical systems (MEMS) six-degrees-of-freedom (6DoF) inertial sensor for GNSS positioning support, autonomous off-highway vehicles and dynamic inclination sensing. Murata’s new SCHA63T sensor is a single package 6DoF component. It can enable centimeter-level accuracy in machine dynamics and position sensing, and can assist in ensuring safe, robust and verified designs.
The sensor enables further advancement in technology and novel solutions for GNSS-based measurement instruments, advanced driver/operator assistance systems, and autonomous vehicles.
The product delivers highest performance available on the component level in the key parameters of bias stability and noise. Murata calibrates orthogonality of all measurement axes, which allows customers and system integrators to skip that critical process step.
A key focus area in product development for SCHA63T has been to ensure operation during high mechanical shock and vibration. Within the same product family, sensor variants are qualified according to the automotive AEC-Q100 standard. The SHCA63T sensor includes advanced self-diagnostic features and can achieve full compliance with ASIL-D (Automotive Safety Integrity Level-D).
The SCHA63T sensor features extensive failsafe functions and error bits for diagnostics. These include internal reference signal monitoring, checksum techniques for verifying communication, and signal saturation/over range detection.
The diagnostic feature of Murata’s three-axis accelerometer is the continuously operating self-test function, which monitors the sensor during measurement. This patented self-test function verifies the proper operation of the entire signal chain, from MEMS sensor element movement to signal conditioning circuitry for every measurement cycle. Even if the system using SCHA63T is not required to follow international functional safety standards, the provided design support documentation enables for customers a cost effective, robust and fast design process.
Murata, based in Japan, has more than 20 years of experience of providing inertial sensors for safety-critical automotive applications like electronic stability control.
Hexagon | NovAtel is offering a new marine-certified GNSS receiver specially designed for nearshore applications. The MarinePak7 multi-constellation, multi-frequency receiver has been specifically engineered to receive Oceanix Correction Service from NovAtel, providing horizontal accuracy up to three centimeters (95%) in a marine environment.
With SPAN GNSS+INS technology capabilities, the MarinePak7 deeply couples GNSS and inertial measurement units (IMUs) for a 3D understanding of your position.
Delivering exceptional positioning, heading, attitude, velocity and heave measurements, the MarinePak7 is optimized to succeed in the demanding marine environment for nearshore applications.
An intuitive user interface reduces training and setup time, making it an ideal solution for use in demanding marine applications, including dredging, hydrographic survey, marine construction and nearshore renewable energy operations.
“The MarinePak7 is NovAtel’s first receiver designed specifically for a marine environment. It provides accurate and reliable positioning for nearshore marine operations using our GNSS technology and Oceanix Correction Service,” explained Hexagon | NovAtel marine segment portfolio manager David Russell. “This receiver was developed by a team of experienced marine engineers and incorporated feedback from existing NovAtel users to deliver a high-quality, all-in-one positioning solution for the nearshore marine market.”
Several optional features are available with the MarinePak7, including GNSS heading, interference mitigation and a UHF radio used to receive RTK corrections.
Tallysman Wireless is offering two new VeroStar marine antennas to its line of GNSS products. The VSP6037L-MAR supports the full GNSS spectrum and the VSP6337L-MAR supports GPS/QZSS-L1/L2/L5, GLONASS-G1/G2/G3, Galileo-E1/E5a/E5b, BeiDou-B1/B2/B2a, and NavIC-L5 signals. Both antennas support L-band correction signals.
Marine vessels often host both Iridium (1616–1626.5 MHz) and Inmarsat (uplink: 1626.5–1660.5 MHz) satellite communication antennas that transmit and receive signals. The VSP6037L-MAR and VSP6337L-MAR VeroStar marine antennas strongly attenuate interference from both signal sources, providing 75 dB to 85 dB of attenuation over Iridium and 85 dB to 95 dB over Inmarsat uplink, enabling clean GNSS signal reception and precise positioning.
Every VeroStar antenna features a robust pre-filter and a high-IP3 LNA architecture, minimizing de-sensing from high-level out-of-band signals, including 700 MHz LTE, while still providing a noise figure of only 1.8 dB.
VeroStar antennas provide the best-in-class low elevation angle tracking of the full GNSS spectrum and L-band correction signals. The wideband spherical antenna element enables VeroStar antennas to deliver ±2 mm phase centre variation (PCV), making them suitable for high-precision marine, positioning and machine control applications.
The VeroStar marine antennas are housed in a rugged and compact enclosure that supports 1-inch pipe thread or 5/8-inch-11 TPI mounting and provides a TNC antenna connector. The antennas have also obtained the stringent IEC 60945 and IEC 61108 marine certifications, making them suitable for challenging marine environments.
A train arrives at Tel Aviv University Station on the Israeli Railway in Tel Aviv. (Photo: svarshik/iStock Editorial/Getty Images Plus/Getty Images)
InfiniDome Ltd., a GPS security company, is joining with with Israeli partner Focus Telecom, in a new country-wide project with Israel Railways. The project involves deployment by Focus Telecom of GPS repeaters at more than 30 railway stations across Israel, providing accurate, location-based service indoors at all locations for a new Israel Railways ticketing app.
A critical component of the project is a monitoring service that detects and provides alerts of any GPS disruption or interference in real time, as they are identified. This is facilitated by infiniDome’s IoT GPSensors and its cloud-based GPS monitoring service, infiniCloud.
“Incorporating infiniDome’s proven resilient PNT capability to monitor and protect such a critical GPS service is a necessary enhancement for government designated critical infrastructures,” said Ehud Sharar, Focus Telecom CEO.
Photo: Focus Telecom
InfiniDome’s monitoring technology for critical assets detects and alerts operators of threats and disruptions of the essential GPS signals. These threats can originate from both malicious or natural causes.
“GPSensor IoT technology combined with our infiniCloud GPS security cloud assures real-time alerts about jamming attacks. All GPS signal data and its assured integrity are available as real time data so Israel Railways can react immediately and reduce downtime of the network,” said Omer Sharar, infiniDome CEO.
Israel Railways is the cornerstone of Israeli critical infrastructure. In 2018, Israel National Railway carried 68 million passengers. This same infiniDome GPS monitoring and protection technology is now available to defend critical infrastructure assets worldwide.
First commercial deployment to be installed on a major turnpike used by tens of millions of vehicles every year
An electronic tolling system that uses high-performance lidar sensors from Cepton and a vehicle identification solution from Red Fox ID is expected to be deployed on a major highway turnpike crossing multiple states in the United States.
The turnpike project is expected to provide fast, accurate, real-time tolling to enable smooth traffic flows. Specifics of the project — including states involved and the timeframe of installation — were not disclosed.
Photo: Cepton
Based on an extended collaboration with leading lidar solution provider Cepton, Red Fox ID — a designer and developer of vehicle identification and classification solutions — has developed a multi-lane, free-flow tolling system called Quantum, which is able to accurately detect, track and classify vehicles of any size or type at highway speeds.
Quantum uses Cepton’s Micro Motion Technology (MMT)-based Sora-P60 or Sora-P90 lidar sensors for high-resolution vehicle profiling, to enable integrators and road operators to achieve highly accurate customer billing in real time, with free flow, barrier-free tolling.
For tolls to be charged correctly based on vehicle class, traditional tolling systems often use tollbooths for manual processing or depend on vehicle speed-reduction infrastructure to allow for time to capture vehicle information. That can cause congestion, increased emissions and frustration among customers.
Advanced systems that aim to enable faster tolling are often subject to significant errors, such as missed vehicles or wrong vehicle classification, because of limitations of the sensors being used, such as cameras and weight-based ground sensors. Vehicle-classification errors can have significant operating cost consequences for tolling operators, while leakage leads to lower revenues. With tollways processing tens of millions of vehicles a year, the cumulative impact of inaccuracies and errors creates significant administrative costs, losses and customer dissatisfaction.
Red Fox ID’s Quantum solution adds an extra layer of accuracy to the tolling system by integrating Cepton’s lidar technology. A gantry-mounted system using Quantum is able to accurately detect and track vehicles even as they switch lanes. Quantum captures and extracts high-quality information, such as vehicle velocity, size and class. All of that information is used as input to a separate billing system to compute and apply the appropriate tolling charge.
Quantum can also direct camera-based systems on the gantry to capture a vehicle’s front and rear plates in the event that a transponder cannot be detected. Through these innovations, Quantum has demonstrated a vehicle-detection accuracy in all traffic conditions of 99.96%, an axle-classification accuracy in all traffic conditions of 99.9% and a vehicle-length accuracy of +/-5%. The system uses Cepton’s Sora-P sensor family which has been tested and proven during extended trials, including in various weather and light conditions.
The recently released Sora-P90 lidar features a 380-Hz frame rate to deliver 1140 line scans per second, providing high-fidelity profiling of vehicles passing at highway speeds. Powered by Cepton’s patented, rotation-free, frictionless and mirrorless MMT, the Sora-P90 is rugged, reliable and scalable, making it suited for automated tolling applications.With a 90° horizontal field of view, the lidar can be set up using one gantry instead of two separate sensors and gantries, making overall deployment more cost effective.
Red Fox ID has been working with Cepton on multiple trials and proof of concept projects across the globe since 2019. This has allowed both partners to expand the application of advanced lidar intelligence for high-accuracy tolling on highways and roadways in a growing list of countries, across North America, Europe, the Middle Eas, Africa and Asia.
“Our industry’s drive for overhead tolling solutions has failed to materialize in the mainstream due, primarily, to a lack of sensors capable of achieving the high levels of accuracy required for a modern tolling product,” said Steve Bird, CEO of Red Fox ID. “The technical innovations enabled by Cepton offer us new design options. Improvements in the resolution of the data, the ability to deal with the full range of weather-related conditions, and the development of a sensor with an in-service lifespan suitable for tolling make it possible, for the first time, for us to develop an accurate, overhead free flow system. Our partnership with Cepton will be a game-changer in revolutionizing the tolling market.”
“It is very clear that lidar’s uses extend far beyond just serving as the ‘eyes’ of autonomous vehicles,” said Jun Pei, CEO of Cepton. “Our lidar technology has a huge part to play in making our transport infrastructure smarter, safer, greener and more efficient, as we can see here following Quantum’s highly successful real-world testing. The key to success for toll operators and providers is minimal error and maximum yield, and we are excited to be partnering with Red Fox ID to help our mutual customers achieve this goal with our market-leading lidar technology. We look forward to working with them to expand our partnership worldwide.”
“Seen & Heard” is a monthly feature of GPS World magazine, traveling the world to capture interesting and unusual news stories involving the GNSS/PNT industry.
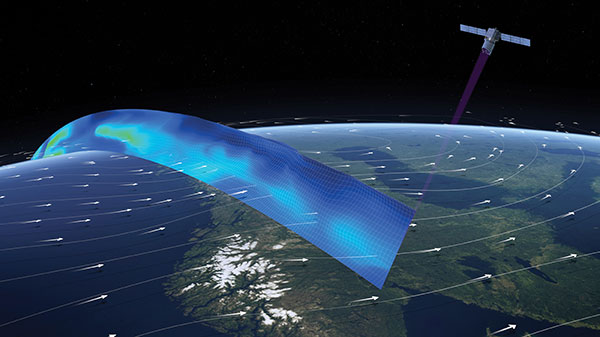
Image: ESA
Caught in a vortex
This winter’s polar vortex blasted the northern hemisphere. Understanding the vortex is the mission of the European Space Agency’s Aeolus satellite. Sudden stratospheric warming can disrupt the vortex, as it did this winter, causing the strong wind around the edge of the polar vortex to weaken or reverse (the processes involved are not fully understood). Aeolus emits short, powerful pulses of ultraviolet light from a laser and measures the Doppler shift from the light scattered back to the instrument from molecules and particles to deliver profiles of the horizontal speed of the world’s winds.
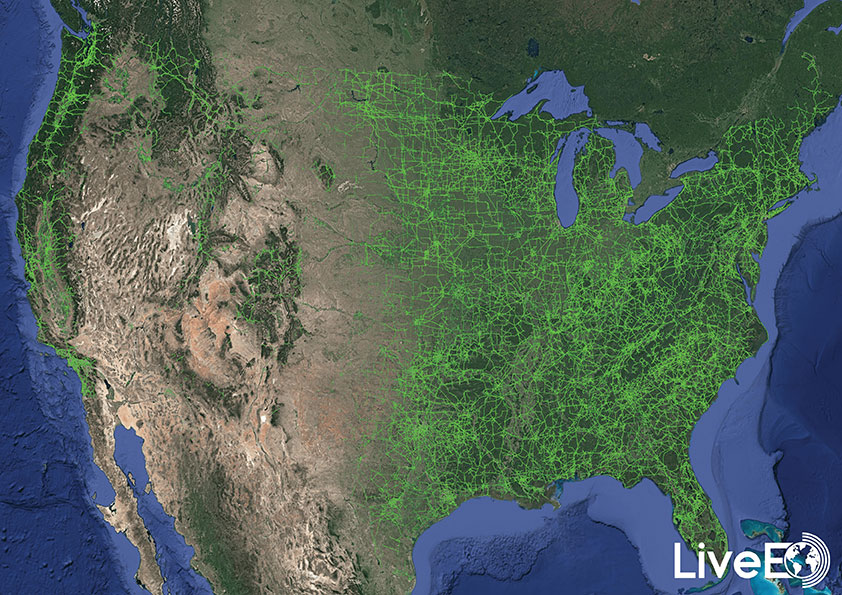
Image: LiveEO
Encroaching vegetation
For the first time in history, according to Berlin-based start-up LiveEO, vegetation encroachment risk to the U.S. transmission grid has been analyzed from space. LiveEO used more than 15,000 satellite images to evaluate risk to 574,000 miles of electricity lines. The analysis covers the detection of vegetation along transmission corridors, as well as identification of grid segments exposed at dangerously close distances. Globally, vegetation causes up to 56% of externally triggered power interruptions.
Photo: Motional
What happens in Vegas
The Hyundai-Aptiv joint venture Motional in February tested its vehicles without safety drivers in Las Vegas. The tests came less than three months after the company received the green light from the state of Nevada to test its vehicles without a human safety driver. The vehicles navigated intersections, unprotected turns and interactions with pedestrians and cyclists. A Motional employee rode in the passenger seat and was capable of stopping the vehicle if needed.
Photo: William Barton/iStock/Getty Images Plus/Getty Images
Of the hundreds of papers researchers presented at the Institute of Navigation’s annual ION GNSS+ conference, which took place virtually Sept. 21–25, the following five focused on advanced technologies in high-precision GNSS. Papers are available at www.ion.org/publications/browse.cfm.
Railway health with GPS + Galileo
Railway infrastructure and vehicle maintenance expenditures are estimated to cost more than €20 billion per year at the European level. This indicates the demand for developing a low-cost system capable of providing prognostic information about the health status of the railway at the points of the interaction between the vehicle and the infrastructure (wheelset, pantograph, rail and catenary). To achieve these capabilities, SIA (System for vehicle-infrastructure Interaction Assets health status monitoring) is being developed by a consortium from five different European countries. Within the SIA, events are captured by a network of sensors, which are time stamped and then accurately geo-referenced by the positioning sub-system of SIA. The positioning sub-system is based on European GNSS (EGNSS) positioning algorithms tailored for the railway environment and comprises onboard as well as back-office processing.
GNSS-based positioning in the railway environment is very challenging. Hence, Galileo with its advanced signal structure is utilized in SIA (in addition to GPS) to improve availability as well as accuracy.
The onboard positioning algorithm has been developed based on a novel GNSS-inertial measurement unit (IMU) hybridized approach. The new approach can overcome frequent measurement gaps within the GNSS observations and maintain the accuracy level required by the SIA. An overview of the back-office positioning in SIA complements the presentation of the onboard processing.
Citation. Moradi, Ramin, Zheng, Yuheng, Hutchinson, Michael, Roth, Michael, Jahan, Kanwal, Goya, Jon, Alvarado, Unai, “Positioning for Train-infrastructure Asset Health Status Monitoring within the SIA-project,” Proceedings of ION GNSS+ 2020, pp. 2948–2959. https://doi.org/10.33012/2020.17636
Snapshot positioning
Snapshot positioning — from a very brief interval of the received satellite signal — is becoming popular for various applications. This paper studies the feasibility of achieving real-time kinematic (RTK) positioning using snapshot data, a method termed Snapshot RTK (SRTK). A major difference of this positioning method is the generation of code and carrier-phase GNSS observables, a procedure the authors explain. To explore the feasibility of achieving RTK under different scenarios, the rate of integer ambiguity resolution (IAR) is assessed by using snapshot measurements generated with different integration times and signal bandwidths under zero-baseline configuration. Under these assumptions, the key factor that influences the RTK fix rate is the code measurement noise. Double difference code measurement errors are evaluated and plotted with the resulting IAR fix rates to find the relationship between them. The performance of using multi-constellation and multi-frequency signals is tested as well. The fix rate can reach 100% when multiple constellations are used. The achieved positioning accuracy is shown to be less than 5 mm in horizontal domain when IAR is achieved successfully.
Citation. Liu, Xiao, Ribot, Miguel Ángel, Gusi-Amigó, Adrià, Closas, Pau, Garcia, Adrià Rovira, Subirana, Jaume Sanz, “RTK Feasibility Analysis for GNSS Snapshot Positioning,” Proceedings of ION GNSS+ 2020, September 2020, pp. 2911–2921. https://doi.org/10.33012/2020.17768
Cooperative positioning
Advances in low-latency communications networks combined with the paradigm of Intelligent Transportation Systems (ITS) have opened opportunities to develop network-based collaborative positioning and navigation. Recent research has fostered the concept of networked GNSS receivers supporting the sharing of raw measurements with other receivers connected to the network. Such measurements (for instance, pseudorange and Doppler) can be processed through Differential GNSS techniques to retrieve inter-receiver distances that can be integrated to improve positioning performance.
This paper investigates an improved Bayesian estimation for a sensorless, tight integration of Differential GNSS-based collaborative measurements through a modified particle filter. A particle filter natively supports the non-Gaussian noise distribution characterizing GNSS-based inter-receiver distances, so the proposed particle filter was designed, implemented and optimized according to the architecture of a proprietary INS-free GNSS software receiver and tested with realistic RF signals, thus showing remarkable improvement in positioning accuracy.
Citation. Minetto, Alex, Gurrieri, Alessandro, Dovis, Fabio, “DGNSS-based Cooperative Positioning using Statistics-Adaptive Particle Filter,” Proceedings of ION GNSS+ 2020, pp. 2652–2666. https://doi.org/10.33012/2020.17530
Virtual base station
RTK (Real Time Kinematic) is a positioning approach that provides centimeter level accuracy by using a reference station. When the rover and the base station are in proximity (short baseline), all common mode errors are eliminated by the double difference, allowing carrier phase ambiguity resolution. But in medium and long baseline cases, ionospheric and tropospheric delays are not completely eliminated, which affects positioning accuracy. This has limited the application of RTK, especially in certain regions where the closest base station is more than 50 km away.
Algorithms like RTK long baseline and VBS (virtual base station) have emerged as an alternative. The virtual base station (VBS) algorithm processes surrounding bases to generate a virtual one within a short distance of the moving rover. By doing so, atmospheric errors will continue to be eliminated in the double-difference model, and, presumably, RTK processing will be assured all across continents.
In this paper, a performance assessment of the algorithm is conducted under various conditions, including high ionospheric activity, high baseline, harsh multipath environments and, finally, in a long trajectory. The results show that the developed VBS algorithm ensures centimeter-level accuracy even under the harshest conditions.
Citation. Saidani, M., Sarri, P., Guinamard, A., Maya, D. Gallego, “Virtual Base Station Algorithm and Performance Assessment,” Proceedings of ION GNSS+ 2020, pp. 2696–2709. https://doi.org/10.33012/2020.17533
Open-world virtual reality
The Open-World Virtual Reality (OWVR) concept combines precise GNSS positioning and a smartphone-grade inertial sensor to provide globally-referenced centimeter-and-degree accurate tracking of a virtual reality headset. Unlike existing augmented and virtual reality systems, which perform camera-based inside-out headset tracking relative to a local reference frame (for instance, an ad-hoc frame fixed to a living room), OWVR’s globally referenced tracking enables a VR experience in which the user’s outdoor exploration is robust to extremes in lighting conditions and local visual texture. This paper introduces the OWVR concept and presents a prototype system with two candidate sensor-fusion architectures, one loosely and one tightly coupled. Comparative performance is evaluated in terms of tracking accuracy and availability of an integer-aperture-test-validated fixed tracking solution. For scenarios with degraded GNSS availability, which will be typical for outdoor VR, the tightly coupled architecture is shown to offer a critical tracking robustness advantage.
Citation. Humphreys, Todd E., Kor, Ronnie Xian Thong, Iannucci, Peter A., Yoder, James E., “Open-World Virtual Reality Headset Tracking,” Proceedings of ION GNSS+, pp. 2931–2947. https://doi.org/10.33012/2020.17635
New tech can track vehicles, drones and cargo remotely within centimeters — key to safe adoption of autonomous vehicles, flying objects and machinery
Vodafone has successfully used new precision positioning technology to remotely track a vehicle to within 10 centimeters of its location, an improvement of more than three meters compared to its current system.
Vodafone is working in partnership with Sapcorda, using Vodafone’s global internet of things (IoT) platform, which has 118 million connections worldwide.
Vodafone expects the technology to enable applications that warn autonomous trucks of obstacles, tell first responders the position of critical medical drones, and give operators the precisely location of important cargo.
Pinpoint accuracy is critical to the acceptance and mass adoption of autonomous vehicles on the road and in factories, airports, dockyards and any site where machines are in motion. A matter of centimeters can be crucial to ensuring the safety of passengers on a driverless bus, or knowing the precise location of a medical drone. a
The tracking technology will also allow an autonomous truck to mind other road users, including cyclists, whose e-bikes can automatically transmit their position and intended direction of travel.
“We might not be able to locate a needle in a haystack yet, but we are getting close,” said Vodafone Business Platforms and Solutions Director Justin Shields. “What we can do now is take new digital services like this one, integrate it with our global IoT platform and fast networks, and offer it securely at scale to many millions of customers.
“Our in-building 5G and IoT services already allow manufacturing plants, research laboratories and factories to carry out critical, and often hazardous, precision work with robots. Now we are applying the same levels of accuracy to the outdoor world.”
Vodafone is redefining its network and technology on a Telco as a Service (TaaS) model. It makes key network capabilities available through common APIs in a cloud platform to deliver new software, video and data applications at scale, in addition to gigabit-capable connectivity.
Vodafone said the TaaS model will benefit large enterprises, improving their ability to locate critical assets, precisely align machines such as driverless trains at platforms, and let farmers, airports, and fleet operators know the exact whereabouts of their autonomous vehicles.
Vodafone IoT-enabled vehicles, machinery and devices — when linked with Sapcorda’s comprehensive network of GNSS receivers and augmentation technology — improves location accuracy by correcting for things like the curvature of the earth, atmospheric delays and clock differences of global positioning satellites. This offers corporations hyper-precise positioning that they can use to ensure a safe environment for their employees, their customers, the public and their machines.
Combined with video and onboard diagnostics, the technology will also allow vehicle operators to carry out accurate location-sensitive remote inspections and even pause machines such as grass cutters on public footpaths when they encounter people.
PPP-RTK method. Vodafone is adopting the precise point positioning – real-time kinematics (PPP-RTK) method with ground-level GNSS stations to achieve the best error correction. GNSS signals are processed and GNSS corrections are sent out to enhance the position accuracy of the vehicles receiving them.
Vodafone is able to equip any number of vehicles with an in-built IoT SIM, and deliver the positioning data at speed using its gigabit-capable networks.
Vodafone recently put this to the test by tracking in real-time the exact lane that vehicles were traveling in during a combined journey of more than 100 kilometers in varying weather conditions.
Sapcorda provided the data feed, which enabled the GNSS signal to be corrected, to deliver the critical-level of positional accuracy. A precise positioning service complements the existing asset tracking and fleet telematics solutions already provided by Vodafone Business for enterprise customers across 54 countries.
Trimble has partnered with Roborace, an autonomous racing series with electric-powered vehicles. As part of the alliance, Roborace will use Trimble’s Applanix POS LVX GNSS-inertial systems in its next-generation autonomous race cars for season one of the championship, which begins in September 2021.
As part of the technology and marketing alliance, Trimble will serve as the Official GNSS-Inertial Positioning Technology Partner and enable Roborace’s engineering team to leverage Trimble resources such as technology, services and expertise that it provides across a wide variety of industries and applications, Roborace said. Trimble also will utilize Roborace’s media platform in its global marketing initiatives.
Image: Roborace
“We are thrilled to be working with Roborace, the world’s first extreme competition of racing teams developing self-driving artificial intelligence for autonomous driving systems,” said Louis Nastro, director of land products at Applanix. “Trimble systems, software and solutions for positioning and orientation are designed for pinpoint accuracy, efficiency and ease of use, and are perfectly suited for autonomous vehicle applications such as Roborace.”
Roborace also looks forward to the partnership.
“At Roborace we are always looking for the best technology to incorporate into our cars and we’re thrilled to announce this alliance,” said Chip Pankow, chief championship officer at Roborace. “Trimble is a leader in the field and the small size and accuracy of the POS LVX is a perfect solution for us. These GNSS-inertial systems will be utilized in all vehicles participating in the Roborace championship.”
Roborace was created to accelerate autonomous software development by pushing the technology to its limits in a range of controlled environments. It also aims to educate and inform the world about autonomous driving. In 2019, the series held six events that drove more than 36 million multi-channel video views.
Designed to operate under the most difficult GNSS conditions found in urban and suburban environments, Trimble’s Applanix POS LV enables accurate positioning for road geometry, pavement inspection, GIS database and asset management, road surveying, vehicle dynamics and autonomous vehicle systems. POS LVX is a configuration of POS LV housed in a robust, rugged enclosure and easily incorporated into small vehicles, autonomous platforms and tight spaces of all types, Trimble said.
Fusing Automotive Radar and OBD-II Speed Measurements with Fuzzy Logic
SYN·ER·GY/ˈsinərjē/ noun: the interaction or cooperation of two or more organizations, substances, or other agents to produce a combined effect greater than the sum of their separate effects; from the Greek, “working together.” That is how the Oxford Dictionary defines this useful property that we often apply to business activities and other human interactions. But it can just as well describe the basis of an apparatus such as a navigation system that consists of several devices working together to produce a safer and more accurate result.
We all know that GPS or any GNSS for that matter doesn’t work everywhere all the time. For example, in built-up areas, signals can be blocked and reflected by buildings leading to positioning errors or complete outages. That is why it is quite common nowadays to combine a GNSS receiver together with an inertial measurement unit or IMU (often in the same package) to produce a more reliable solution for continuous navigation. But IMUs drift and so during an extended GNSS outage, the fidelity of the position reported by the GNSS plus IMU system will degrade with time. And so additional sensors must be added to the mix to improve the reliability of the navigation system. LiDAR, cameras, altimeters and so on have all been used severally or individually to augment the basic GNSS plus IMU combination. Self-driving cars, for example, use multiple sensors to provide safe navigation under specific conditions. Such specialized systems are quite expensive and so we might ask: Can the basic combination of GNSS and an IMU (or some of its components) be augmented by measurements already available in most vehicles or provided easily and inexpensively by equipment add-ons?
Yes. One measurement that helps is the forward speed of the vehicle. This is available from the vehicle’s on-board diagnostics computer system that tracks and regulates a car’s performance. Car manufacturers have adopted a standard for reporting data, the latest version of which is OBD-II. It is easy to interface to the OBD-II connector in a vehicle and extract the speed measurements – the same measurements displayed by the vehicle’s speedometer. Another potential source of speed measurements is the radar in most modern vehicles used for adaptive cruise control. That measurement is hard to acquire and has other limitations. But the idea to use radar as an input to a navigation system is a good one and easily obtained and installed radar units can be used instead.
But how do you optimally combine all of these sensor readings to produce reliable navigation? In the Innovation article this month, we take a look at how fuzzy logic can be used to get a reliable speed estimate, how that can be combined with accelerometer and gyroscope measurements to get position, velocity and attitude of a vehicle and, lastly, how that can be combined with GPS-derived position and velocity in an extended Kalman filter to produce an integrated navigation solution. Now that’s synergy.
Abosekeen
Standard land vehicles and self-driving cars have acquired precise navigation solutions to improve safety and assist drivers. GNSS is used as the primary source of the navigation solution for such applications. However, when driving in environments such as urban canyons, tunnels, or under bridges, GNSS signal reception deteriorates. Worse, it may suffer from a full outage. Because of this, we need a supplemental or backup system, such as an inertial navigation system (INS). The INS provides a complete navigation solution, and it is not affected by signal deterioration or jamming. GNSS/INS integration can achieve better accuracy than GNSS alone. However, such efficiency cannot be maintained during extended GNSS outages, especially with low-cost and commercial-grade inertial sensors for the INS. This drawback principally occurs because the INS solution suffers from accumulated error growth over time. This error causes path or trajectory drift, which becomes significant in the long term.
The fusion between an INS and a GNSS-based system provides a more robust solution than each system alone. In particular, INS/GNSS integration requires both systems to provide the vehicle with an accurate solution. However, when the vehicle is in challenging environments, the GNSS receiver cannot successfully update the integration filter, leaving the INS as the only source for the solution. When a GNSS outage is prolonged in some extreme situations, the solution quality deteriorates rapidly from INS drift. In particular, when using a micro-electromechanical system (MEMS) based inertial measurement unit (IMU), the drift rate significantly increases.
Several approaches have been introduced to overcome such drawbacks. Our reduced inertial sensor system (RISS) concept can be a replacement for the INS in land vehicle and ground robot applications. RISS can provide a complete navigation solution with fewer sensors than a standard INS. It is easily implemented for common land or self-driving vehicle navigation because it uses the vehicle’s on-board diagnostics standard II (OBD-II) device to determine the vehicle’s forward speed. INS requires two integration steps for positioning, but using the OBD-II speed measurements in the RISS mechanization requires only one.This reduction reduces the drift rate because it limits error accumulation from the integration process.
RISS depends mainly on OBD-II speed measurements to provide the land vehicle forward velocity. Unfortunately, these speed measurements are vehicle-specification dependent. Furthermore, these speed measurements are vulnerable to several types of error sources that can be categorized as deterministic (systematic) and non-deterministic (non-systematic). Deterministic errors come from wheel-diameter changes due to variations in temperature, pressure, tread wear, speed, unequal wheel diameters between the different wheels, inefficient wheelbase (track width), limited resolution and sample rate of the wheel encoders. Non-deterministic error sources include wheel slips, uneven road surfaces and skidding. Both groups of error sources negatively affect the velocity, traveled distance and heading estimations using the speed measurements from the OBD-II device.
Accordingly, we have made several RISS modifications to enhance performance, such as integration with a GPS receiver by enhancing the system design matrix for the integration filter. Moreover, an azimuth measurement update from magnetometers was added to the RISS/GPS integrated navigation system to provide azimuth updates during GPS outage periods, so the system can ensure more reliable positioning accuracy in challenging GNSS environments. Furthermore, we introduced a radar-based RISS to overcome OBD-II speed measurement errors. With this system, we demonstrated the superiority of using a frequency modulated continuous wave (FMCW) radar as a speed source instead of the one based on the OBD-II device. Automotive adaptive cruise control (ACC) mainly uses the Doppler measuring technique to measure the target’s (the vehicle ahead’s) relative distance and velocity. The primary radar unit’s radiation pattern is supposed to be a narrow beam to avoid other moving objects. Unfortunately, clutter affects forward-looking radar-collected data. Besides, extracting the onboard vehicle’s speed is difficult primarily because of the radar installation position.
We improved the use of ACC by modeling the linear and non-linear error components with Fast Orthogonal Search as a non-linear system identifier. This provided a more precise solution during outages extending from 60 seconds to 10 minutes. Furthermore, vehicle positioning using ACC was enhanced by extracting the primary and target vehicles’ relative distances under specific rules in urban canyons. These results encouraged us to introduce a fusion between the RISS and ACC, developing a more robust navigation system that relies on more than one sensor type.
In this article, we propose a smart fusion technique to produce more accurate velocity information from both the Doppler radar and the OBD-II speed measurements. Our new RISS mechanization for land vehicle navigation uses the fused speed from the radar and the OBD-II device with a vertical gyroscope and two transversal accelerometers.
3D-RISS MECHANIZATION
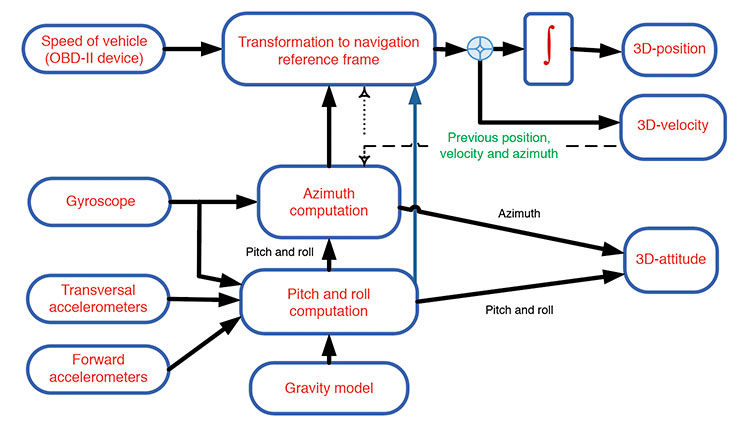
Our approach relies on a RISS incorporating a single-axis gyroscope, accelerometers, and speed measurements. Two accelerometers are used to estimate the pitch and roll angles instead of using two additional gyroscopes. Speed from the OBD-II device and heading information from the gyroscope aligned with the vehicle’s vertical axis enables the calculation of velocity, as shown in FIGURE 1. Calculating pitch and roll from accelerometers rather than gyroscopes retains RISS’s low cost while avoiding the gyroscope’s underpinning integration of velocity and position errors. When pitch and roll are calculated from accelerometers, the first integration of the gyroscope to obtain pitch and roll is eliminated, and thus the error in pitch and roll is not proportional to time integration.
FIGURE 1. Block diagram of speed measurements from the OBD-II device and RISS mechanization. (Image: Authors)
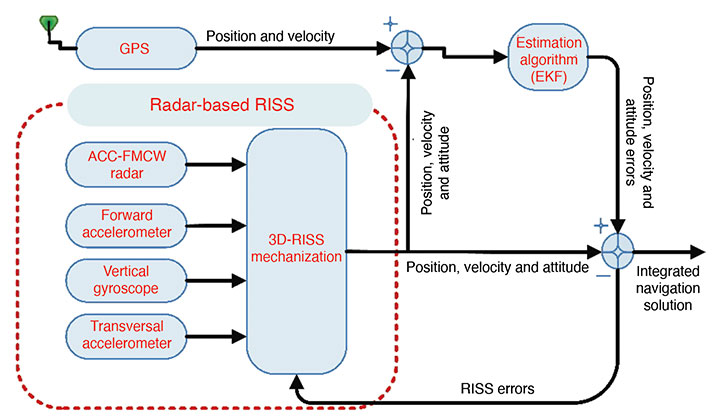
ACC-RADAR-BASED RISS
The radar-based RISS mechanization can provide a complete navigation solution (including 3D position, velocity and attitude) using a reduced number of sensors compared to the classic INS. It consists of longitudinal and transversal accelerometers, one vertical gyroscope and one radar unit (see FIGURE 2). In this mechanization, the OBD-II-device-related measurements are replaced by those extracted from the FMCW radar.
Data fusion is the process of combining data from multiple sensors and related information to achieve more specific inferences than can be achieved by using a single, independent sensor. Fusion processes are often categorized into three modes — low, intermediate and high-level fusion:
Data level combines several sources of the same type of raw preprocessed data to produce a new data set expected to be more informative and useful than the inputs.
Feature level combines features such as edges, lines, corners, textures or positions into a feature map used for the segmentation of images, detection of objects, and so on.
Decision level combines decisions from several expert modes. Methods of decision fusion are voting, fuzzy logic and statistical methods.
Various approaches for multi-sensor data fusion including weighted average, Bayesian estimators, adaptive observers, algebraic functions, fuzzy logic, neural network, soft computing, non-linear system fusion, and Kalman. Drawbacks of these methods include:
the necessity of adding new sensors to the system.
use of linear estimation models that need previous knowledge of signal statistics.
the presence of more than one faulty signal — an essential limitation of the performance.
the need to understand the behavior of the system to generate governing rules.
We used a data-clustering approach, which divides the data from a particular set into subsets (clusters) based on similarity. It could be defined as a reorganizing process for the dataset.
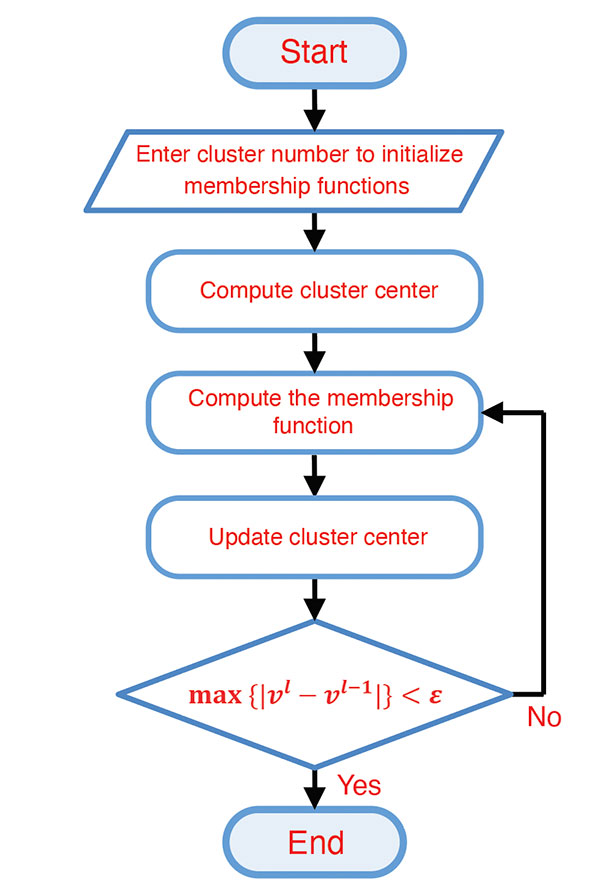
Fuzzy C-means (FCM) Algorithm. The FCM clustering algorithm represents the “fuzzify” step in the fuzzy system and is based on the minimization of an objective function called the C-means functional. The FCM algorithm (FIGURE 3) computes the standard Euclidean distance norm, which induces hyperspherical clusters. Hence it can only detect clusters with the same shape and orientation because the common choice of the norm-inducing matrix is the identity matrix. Three parameters in this algorithm have to be determined at the beginning: the number of clusters, the weighting parameter representing the system’s fuzziness, and the ending threshold, respectively.
FIGURE 3. FCM flowchart. (Image: Authors)
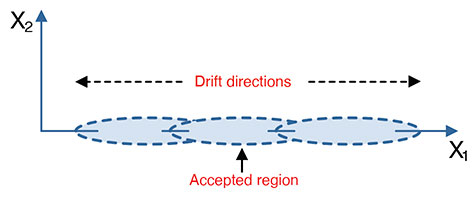
Cluster Number Selection. The FCM algorithm required predefining the number of clusters (Figure 3). This number can be entered randomly, taking iterations and time to converge to the best number, or be calculated. Many methods could be used, such as the validation parameters but only in an offline mode, or by using the data distribution itself and calculating the probability density function (PDF) by first calculating the data’s kernel and then calculating the PDF. This process can be done using the smooth kernel density estimator (SKDE), which is a powerful real-time approach. The main idea is that the measurements values drift in two directions around the acceptable region of measurements (see FIGURE 4). The number of clusters has to be determined in every instance of measurement. From the same figure, the partitions may be three if the drift was in two directions from the accepted region or may be two partitions if the drift at any instance were to the left or to the right direction (one direction drift).
FIGURE 4. Measured data partioning. (Image: Authors)
Subsequently, the number of clusters is determined according to the following two rules, based on the kernel estimator’s maximum peak location: If the maximum peak of the SKDE is left- or right-skewed, then the number of partitions is two; if the maximum peak of the SKDE is centered, then there are three.
METHODOLOGY
The methodology of the implementation of our approach is divided into two parts. The first part utilizes the FCM explained in the previous sections to produce a fused vehicle forward speed from the radar and the OBD-II device. The second part uses the fused speed in the INS mechanization instead of using one sensor only. Further, the mechanization output is integrated with the GPS receiver to establish a more accurate navigation system.
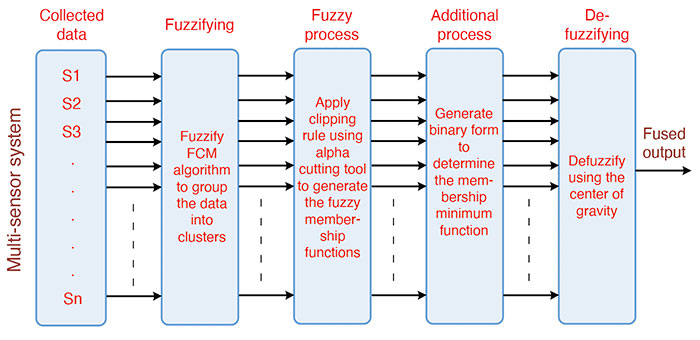
Sensor Fusion using Fuzzy Clustering. The data-fusion technique using the fuzzy clustering algorithm (FIGURE 5) consists of five main parts:
collecting data from the environment by using multiple sensors.
grouping the collected data by using the FCM algorithm in cluster form (“fuzzification”).
applying the fuzzy clipping rule using a cutting tool (fuzzy process).
making use of the clipping-rule properties to perform the fusion mechanism (additional process).
using the mean of the minimum to estimate the fusion output (“de-fuzzification”).
FIGURE 5. Sensor data fusion mechanization. (Image: Authors)
The first part is concerned with setting the sensors for measuring a particular phenomenon from the environment. The second part is to “fuzzify” these measured data, using the FCM to separate the sensors’ data to a certain number of clusters with membership matrix and cluster centers. The fuzzy process deals with the output clusters and membership functions through a fuzzy process called the fuzzy clipping rule. This rule divides the membership function into two regions: the upper region of the cutting threshold, which is clipped and is useless in the fuzzy environment, and the lower region from the cutting threshold, which is the useful region in the fuzzy environment.
Additional processes are applied to benefit from the previous stage — the existence of two regions, one useful, and the other not. This process aims to distinguish between the membership’s functions of the clusters. This could be achieved by generating a binary code that represents the membership function of the clusters. This binary code is generated by comparing the membership function with the threshold value. After the clustering process, each cluster membership function is represented as a binary code. The creation of this code depends upon the membership functions for the clusters and a variable threshold level.
The defuzzification part aims to extract the suitable value and in the same units as those of the measurements. This part produces the fusion output. This output comes from the minimum binary code, which denotes the selected suitable cluster membership function. This cluster contains the optimum solution. This solution or the fusion process output is determined by the centroid of the selected membership function.
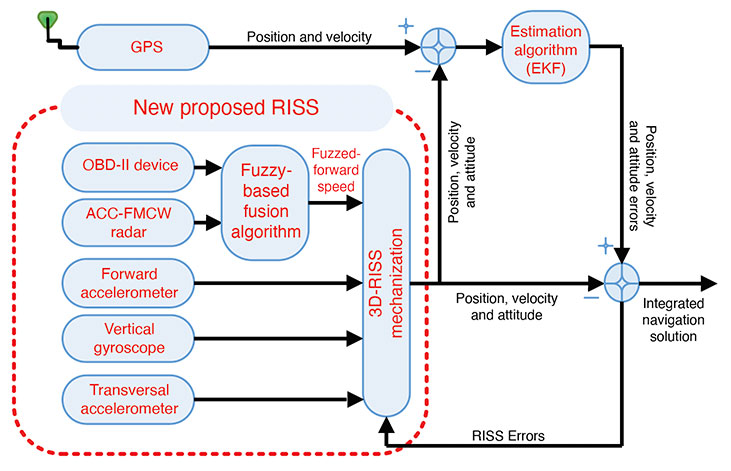
Fusion-Radar-RISS/GNSS Integrated Navigation System. In this part of our technique, the fusion algorithm’s output is used in producing a full navigation solution as a control input of the RISS mechanization. This solution is subsequently integrated with the GPS receiver in a loosely coupled scheme using an extended Kalman filter (EKF). The overall proposed integrated navigation system is shown in FIGURE 6.
We carried out the experimental work to verify the proposed navigation system’s effectiveness by traveling real road trajectories. The testbed equipment was mounted inside and outside the test van.
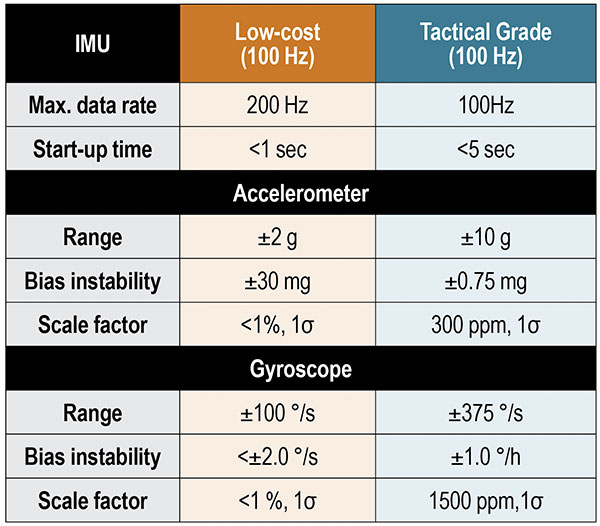
The interior testbed coincides with the van axes. It was rigidly and firmly fixed in the rear seat location using a standard seat chassis. For inertial sensors, we used both a low-cost MEMS IMU and a tactical-grade IMU. The specifications of these units are shown in TABLE 1.
TABLE 1. Performance characteristics of IMUs.
We used a dual-frequency GPS receiver with an output rate of 1 Hz. The tactical-grade IMU includes three fiber-optic gyroscopes and three MEMS accelerometers. The tactical-grade IMU and the GPS receiver were integrated using an off-the-shelf assembly developed by the manufacturer to provide a fully integrated, tightly coupled GNSS/IMU system that delivers a highly accurate 3D navigation solution. This tightly coupled integrated system from the manufacturer is used as a reference to compare the performance and the effectiveness of our proposed methods.
The FMCW radar development kit from the manufacturer was mounted on the front bumper. The unit’s working frequency is 24.5 GHz with a maximum frequency span of 1.5 GHz, a maximum update rate of 10 Hz, a maximum detectable speed of 215 kilometers/hour, and a 3 dB-beamwidth angle of 8.5°. The chirp frequency spans were adjusted to be 0.125 GHz. The maximum coverage range was 30 meters, and the minimum was 0.5 meters.
RESULTS AND DISCUSSION
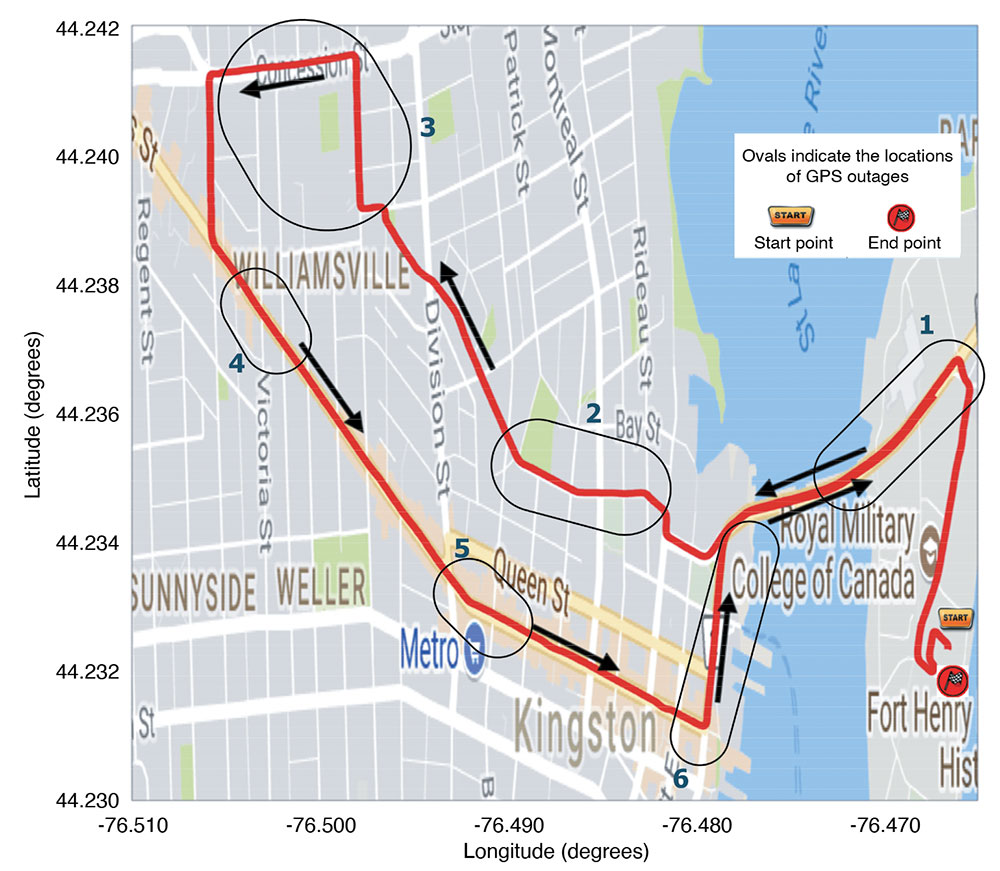
We conducted a road test with the proposed approach in the downtown area of Kingston, Ontario, Canada, in August 2017.
The trajectory followed is shown in FIGURE 7 projected on a Google map with the approximate locations of the outages. The reference is plotted in red, and the black arrows mark the direction of motion.
FIGURE 7. Road test trajectory with ovals indicating the approximate locations of GPS outages. (Image: Author)
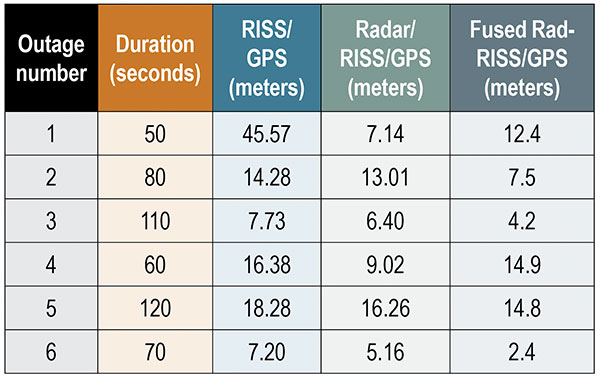
Performance Evaluation. The proposed system performance was tested over six simulated outages. The outages have been selected to contain several dynamics such as turns, consecutive turns, stopping, crossing intersections, and straight driving. Furthermore, the outages occurred at different speed levels. The proposed system performance was compared to the traditional RISS/GPS and Radar/RISS/GPS integrated navigation system. The comparison criteria are 2D-position root-mean-square error (RMSE) and the maximum errors.
We compared our results using the radar-only versus OBD-II device test. TABLE 2 shows the RMSE of the 2D-position from the three systems in meters. Notice that the proposed system’s performance is better than the other two systems during four of the six outages. This result was achieved using the smart fusion technique to fuse the FMCW radar and the OBD-II speed measurements. Accordingly, the obtained speed is positively affecting the overall system performance.
TABLE 2. 2D-Position RMS-error for the low-cost INS unit during outages.
The average 2D-position RMSE reached 18.24 meters when using the OBD-II speed measurements only and 9.5 meters when using the radar only. On the other hand, the RMSE reached 9.4 meters when using the fusion between the two systems. The improvement percentage was 48.4% when applying the proposed integrated navigation system and 47.8% when using the radar-based system. The results show that the proposed system outperformed the other systems in outages 2, 3, 5 and 6 but did not do better than the radar-based system in outages 1 and 4. We highlight three outages.
The first outage had two left turns after a stop sign over a slippery road. This outage lasted for only 50 seconds, but the system’s behavior was due to wrong measurements combined with a complicated driving scenario when using the traditional RISS/GPS. On the other hand, the radar-based RISS/GPS produces a better solution because of having better velocity measurements in the mechanization, which provides the navigation filter with a better navigation solution. The proposed system limits the drift to around 16.7 meters, while the traditional system had a 68.7-meter drift in its solution.
The proposed system based on the fusion between both speed sensors — OBD-II and radar — could not compete with the radar because of the enormous gap between the two sensors and the lack of extra sensors. Despite that, the system produced a solution with 2D-RMSE of 22 meters, which is also better than the traditional RISS based on the OBD-II device and close to the results from fusing the radar. This problem can be solved by using an extra radar unit, typically installed with an ACC system. The system usually uses six radar units, two in the front and four at the vehicle’s corners.
The second outage duration was 80 seconds and contained two consecutive turns, right then left. The radar-based system reduced the solution drift from 28.13 to 23.58 meters. In contrast to the previous outage, the proposed system reduced the 2D-position maximum error to 14.2 meters. The proposed system’s result is superior to the radar-based system, which performed better in the previous outage because the OBD-II and radar measurements gap is not as large as the previous outage. The dynamics, the average speed and the road surface differ from the first outage.
The third outage was chosen to be a slight turn and mostly straight driving with an average speed of 60 kilometers/hour. This outage lasted for 110 seconds, and the proposed system holds the solution error growth down to 8.9 meters. The traditional system had a higher error growth rate and held it to 20.6 meters, and the radar-based system error reached 14.92 meters. This outage contained fewer dynamics when compared to other outages. Moreover, the slippage and false counting by the OBD-II device was not as considerable as in the first outage.
CONCLUSIONS AND FUTURE WORK
The performance of using a multi-sensor data-fusion technique based on fuzzy clustering successfully fuses the data measured by both the radar and the OBD-II device to produce a more robust forward speed of a moving land vehicle. The proposed system performance tested during six simulated GPS outages containing various dynamics significantly improved the overall navigation system, especially when the GPS signals were blocked. Finally, the fusion between multiple sensors leads to better performance if there are enough sensors or a fault-detection system to prevent the faulty sensor from biasing the fusion results. Moreover, the results demonstrate the superiority of the proposed fused radar RISS/GPS over each system alone.
As an extension to work reported here, we plan to apply our approach with an extra number of sensors to avoid the kind of drift that happened in outage number one. In addition, we suggest that a sensor fault-detection smart algorithm be added to the system to detect and control faulty sensors.
ACKNOWLEDGMENT
This article is based on the paper “Enhanced Land Vehicle Navigation by Fusing Automotive Radar and Speedometer Data” presented at ION GNSS+ 2020 Virtual, the 33rd International Technical Meeting of the Satellite Division of The Institute of Navigation, Sept. 21–25, 2020.
MANUFACTURERS
Our testbed used a Crossbow (now Moog Crossbow, www.moog.com) MEMS-grade XBOW IMU300CC IMU and a NovAtel/Hexagon (www.novatel.com) IMU-CPT tactical-grade IMU. We also used a SPAN-OEM4 or SPAN-SE NovAtel/Hexagon dual-frequency GNSS receiver. The radar development kit used is a Sivers IMA (now Sivers Semiconductors, sivers-semiconductors.com) RK1001K/00.
ASHRAF ABOSEKEEN is a lecturer in the Department of Avionics Engineering, Military Technical College, Cairo, Egypt. He received a B.Sc. and M.Sc. in electrical engineering from the Military Technical College in 2004 and 2012, respectively. He received his Ph.D. from the Department of Electrical and Computer Engineering, Queen’s University, Kingston, Ontario, Canada, in 2018.
UMAR IQBAL is an assistant clinical professor in the Department of Electrical and Computer Engineering, Mississippi State University. He completed his Ph.D. in electrical and computer engineering at Queen’s University in 2012.
ABOELMAGB NORELDIN is a professor in the Department of Electrical and Computer Engineering, Royal Military College of Canada, Kingston, Ontario with a cross-appointment at both the School of Computing and the Department of Electrical and Computer Engineering, Queen’s University.