Polaris Wireless, a provider of high-accuracy, software-based wireless location solutions, has signed a multi-year, multi-phase contract for delivery of a wireless location solution that complies with the Federal Communications Commission’s (FCC) most recent E911 wireless location accuracy mandate with The Alaska Wireless Network, a company wholly owned by GCI Communication Corp (GCI).
The first phase of the contract extension includes the Polaris Wireless Evolved Serving Mobile Location Center (E-SMLC) with hybrid location software for LTE networks that complies with FCC-mandated indoor location requirements. Subsequent phases include delivery of additional location technologies and hybrid algorithms as cellular networks and mobile devices continue to evolve and become more capable.
Polaris Wireless describes its hybrid location solution as inherently future proof to take advantage of improvements in cellular networks and mobile devices.
“We are excited to continue working with GCI in providing our software-based location solutions,” said Amir Sattar, vice president of global operations for Polaris Wireless. “Polaris takes great pride in GCI trusting us to provide GCI E9-1-1 callers with the highest level of location accuracy when and where they need it most.”
“We have enjoyed a long-term relationship with Polaris Wireless delivering wireless E9-1-1 location solutions for many years,” said Gene Strid, chief technology officer of GCI. “As the carriers must now locate E9-1-1 callers in challenging indoor environments, we are happy to leverage Polaris Wireless’s technological innovation and commitment in delivering high-accuracy, software-based location solutions.”
“Polaris Wireless E-SMLC product leverages all available and emerging technology to deliver the best location position accuracy we can for our subscribers’ emergency calls,” said John Myhre, vice president of wireless technology at GCI.
Winter weather can make fieldwork more dangerous. If a worker falls off a structure, becomes trapped or is otherwise incapacitated, in a remote location or working alone, he or she could be without aid for hours.
The Mobile Defender Model-S (MD-S) by SecuraTrac is designed to monitor field workers and provide alerts to keep them safe. It provides global GPS services and is able to withstand extreme conditions and uses.
In an emergency situation, taking out a cell phone or tablet to make a call or send a message is not always possible.
The MD-S monitors worker status and can immediately call for help if a problem is detected. The worker can also press a button to be connected to responders.
The MD-S features SecuraTrac’s new fall advisory capability and more than 30 days of battery life on a single charge, the company said.
For those who want high accuracy, but don’t need it full time, high-productivity dedicated professional solutions may not be cost-justified. In these cases, a “positioning as a service” subscription could offer a viable use model.
Achieving precision positioning with just a standard mobile device, a correction stream using the mobile device’s data connection and a high-accuracy positioning application produces a very low barrier to achieving high accuracy.
ByStuart Riley, Herbert Landau, Victor Gomez, Nataliya Mishukova, Will Lentz and Adam Clare, Trimble Inc.
We expect that for professional applications that need precision positions, a dedicated system that employs a custom GNSS chipset and purpose-built applications will continue to be the right solution. However, it becomes clear that the ubiquity of consumer mobile devices, with increasing computing power, ruggedness and an expanding feature set, presents fertile ground for new development of improved positioning systems that don’t have strict professional requirements.
A range of new use models and applications will be enabled by consumer mobile phones with technology that improves positioning performance. The goal of the work presented here is to assess what level of performance can be achieved by using proprietary PVT (position, velocity, time) engines utilizing GNSS measurements from the Android GNSS measurement application programming interface (API).
We first review GNSS measurement and positioning performance from a subset of the current Android phones/tablets currently on the market. Then we show the position performance achievable using precision engine with measurements from a dual-frequency GNSS chipset targeted for the cellular handset market. This class of device is expected to be integrated into consumer cellular devices on the market within the next 1 to 2 years.
Performance of Current Phones
We tested various devices including the Nexus 9 (which provides phase data) and various other Android devices that implement the new API. Most devices tested do not support phase data; of the few devices tested that do provide phase data, all except the Nexus 9 implement GNSS power duty cycling. This is a mode where the GNSS chipset is only active for a fraction of each second to reduce power consumption. This results in cycle slips each epoch, which makes carrier-phase processing for real-time kinematic (RTK) unusable.
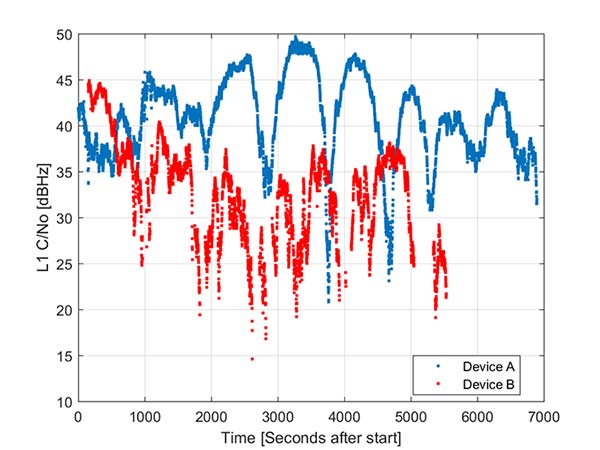
During the testing a wide range of performance across devices was observed. Figure 1 shows the C/NO for a high-elevation GPS satellite collected at the same time from two different Android models that implement the GNSS measurement API. The units were located in a clear environment less than a meter apart. Deep fades are present, most likely caused by deconstructive multipath.
Figure 1. Comparison of the C/NO from two different Android devices.
However, the devices show significantly different tracking performance: device B reports over 10 dB lower C/NO for much of the test and eventually stops reporting measurements. During our analysis, around six different Android devices have been tested; it isn’t clear whether the devices tested are typical over a broader population of device types.
Before attempting to position with observables from Android devices the measurement quality was analyzed. As only a subset of current devices that support the API provide phase information we wanted to evaluate both a phase-based RTK engine and a pseudorange/Doppler based code engine to determine what is possible from each class of device.
One of the devices tested was a Samsung S7 device. It provides pseudorange, Doppler and phase via the GNSS measurement API. However, the phone implements power duty cycling so after a short period of operation the duty cycling mode was enabled which resulted in a cycle slip on the phase every epoch.
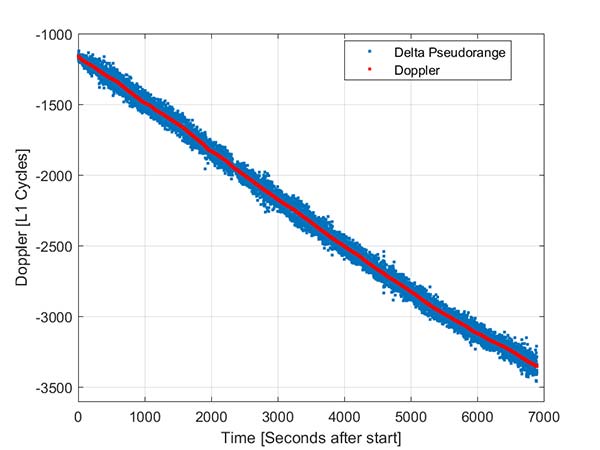
To derive an improved position from this class of device pseudorange and Doppler can be fed into a code-phase positioning engine. Fortunately, the Doppler provided by the device is of reasonable quality as can be seen from Figure 2.
Figure 2. Android GNSS observables: Doppler versus time-differenced pseudorange.
In this simple analysis measurements from a single high elevation satellite were analyzed. The Doppler is plotted along with the differenced pseudorange converted into L1 cycles. It can be seen that as expected the Doppler has much lower noise and so can be used in a pseudorange smoother.
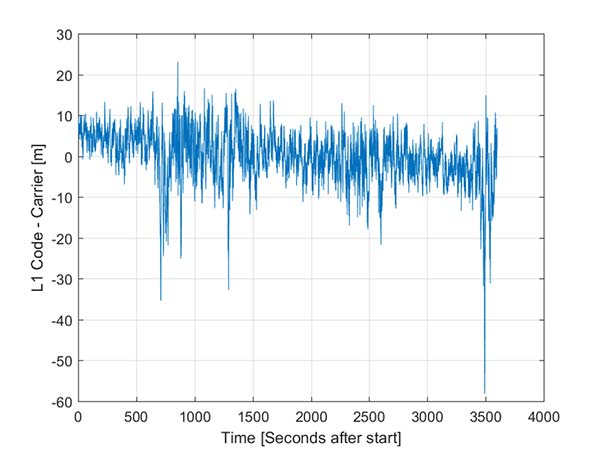
A simple way to view the pseudorange noise is to subtract the carrier phase from the pseudorange. If there are no cycle slips this should show ionospheric divergence with the noise dominated by the pseudorange noise. The absolute level is arbitrary as it includes integer carrier cycles. Figure 3 shows an example from an Android device.
The data was captured on a building roof in an open environment. There’s a slight downward trend due to the ionospheric divergence between code and carrier, but the metric is dominated by the pseudorange noise. For this example from a high elevation GPS satellite the standard deviation is 6.5 meters. For comparison, a precision receiver connected to a precision GNSS antenna providing unsmoothed pseudorange in this environment would have a standard deviation of a few decimeters.
Another way to assess the measurement performance is to form double difference residuals. Data was logged from pairs of identical devices mounted with a common orientation. An RTK system was used to measure the same point on each device. The camera lens location above the screen was used as the reference point.
An accurate vector between the two references points was computed and used as truth in a double-difference residual analysis. Even though we do not know the precise location of the phase center of the antenna, because the difference was performed between two devices that are the same model and have the same orientation the error in the phase center location is common and will cancel. Various pairs of devices were tested by being mounted on a wooden board on a tripod at approximately waist height. The test configuration is shown in Figure 4.
Figure 4. Android device test configuration.
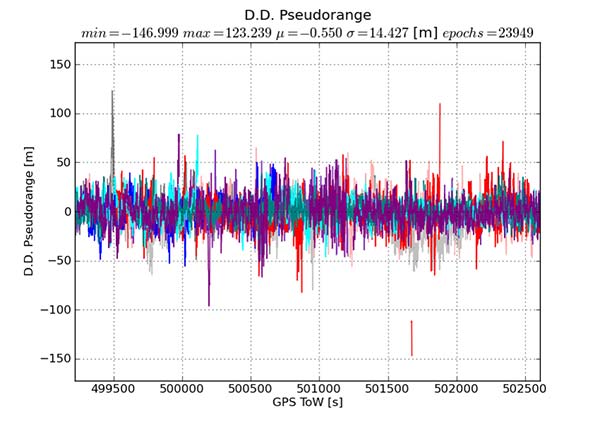
Figure 5 provides the double difference GPS L1 C/A pseudorange residuals between two Android devices. We see errors beyond 100 meters and a standard deviation across all data of 14.4 meters. A precision system (RTK or RTX/PPP) would use a standard survey quality base or network of bases and not an Android device for the correction data.
Figure 5. Short baseline double-difference pseudorange, Android devices.
Consequently in a typical operating mode where a precision data stream provides corrections, the contribution in a double difference from the pseudorange on the Android devices would be roughly half the Android-to-Android residual seen in this test or approximately 7.2 meters for this example.
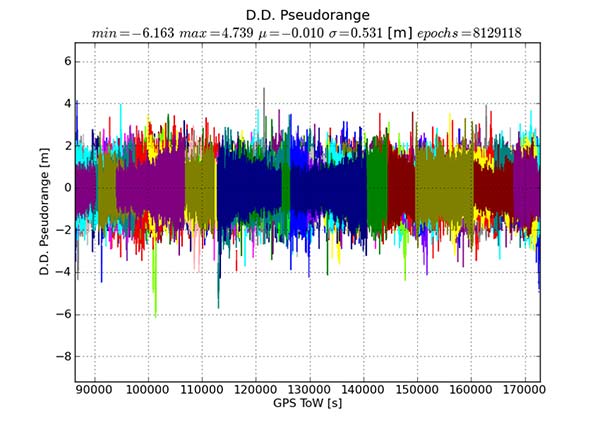
For comparison, the same metric was generated between two precision GNSS units connected to antennas on the same roof. While the data was not from the same time period, we observe very consistent performance over time.
Figure 6 shows the same pseudorange double difference across a short baseline over 24 hours. When comparing Figures 5 and 6, note the difference in the scale on the pseudorange residual axis. The standard deviation from a pair of precision devices is 53 centimeters (cm) or 27 times lower noise than an example pair of Android devices.
Figure 6. Short baseline double-difference pseudorange, precision devices.
All phones that provide GNSS measurements via the Android API publish the phase data in the accumulated delta range field. An accumulated delta range is not necessarily a full phase measurement; it can have an arbitrary starting phase.
For example, in a precision GNSS receiver, if the receiver locks to a satellite and some time later locks a second channel to the same satellite, the phase measurement from the two channels may have a different integer cycle component, but the subcycle component would be the same except for millimetric tracking noise.
If the two channels are providing accumulated delta range the initial phase offset may differ by up to one cycle. From the population of Android devices that publish phase that we have tested we have not observed any devices that deliver true full phase.
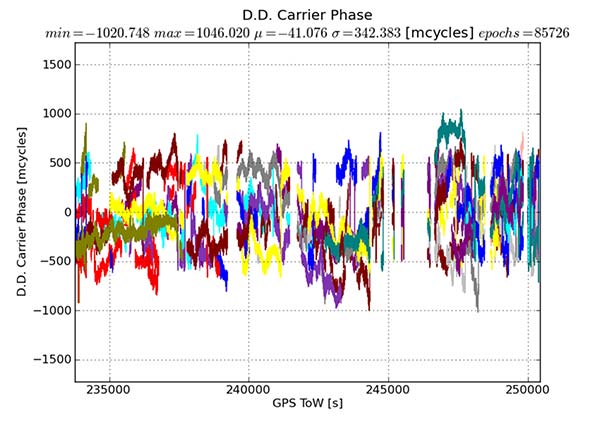
They all deliver an accumulated delta range with an arbitrary phase offset. This limits a phase engine to float processing and ambiguity fixing is not possible. The Android phase data collected from the previously described experiment was processed to provide the double difference carrier residuals. This is shown in Figure 7.
Figure 7. Short baseline double-difference phase residuals, Android devices.
The y-axis is in millicycles (1,000 millicycles = 1 cycle or approximately 19 cm for L1 GPS). Jumps are seen as the reference satellite changes or when the measurements have cycle slips. In this case the standard deviation is 342 millicycles. A double difference residual on a precision receiver in a similar environment with a high-quality antenna on a short baseline is an order of magnitude lower than this.
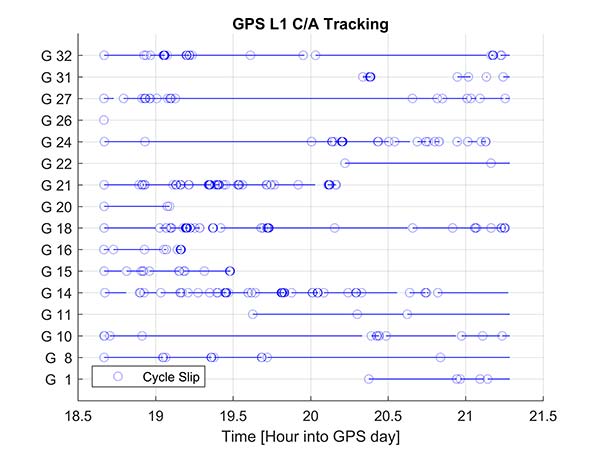
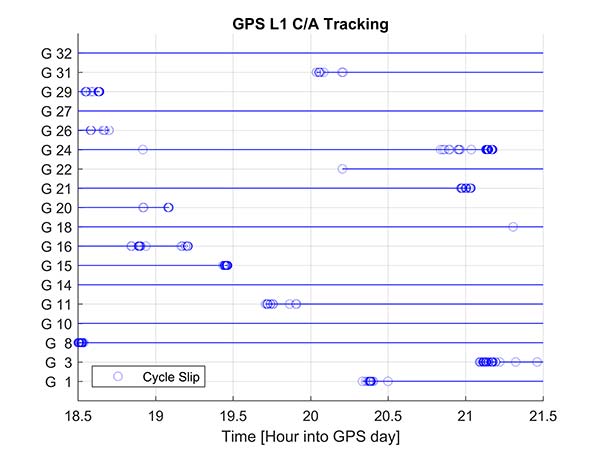
Another useful metric to review are the number of reported cycle slips. Figures 8 and 9 show a comparison of the cycle slips reported on GPS L1 C/A from an Android device compared to data logged on a precision receiver over the same time span. The receiver tends to only cycle slip at low elevation; the device had a zero-degree mask. The Android GNSS device cycle slips at higher elevations, probably a result of deep multipath fades due to the poorer antenna.
In an ION GNSS+ 2017 paper, we showed the achievable position performance using an RTK engine that had been previously customized to operate with measurements from consumer GNSS chipsets. It operated in a float mode due to the sub-cycle issue found in phase data from Android devices.
We also demonstrated the performance from a precision code-based PVT engine that had changes to the a priori measurement error estimate, a modified pseudorange/Doppler Hatch filter and used SBAS data to correct the position. As very few current Android devices deliver phase information the two engines were used to analyze what is possible today with the pseudorange and may be available in the future as phase is more universally available.
Data was processed from a Nexus 9 tablet, the only known Android device that has GNSS power duty cycling disabled. The unit was unmodified and so the Android tablet’s integrated GNSS antennas were used. The 2D performance is given in Table 1.
Table 1. 2D performance from Nexus 9 Android tablet.
Only GPS L1 and GLONASS L1 measurements were used and the RTK float solution delivered similar performance to the pseudorange solution. This is due to a combination of issues, very high pseudorange noise, and a significant number of cycle slips (see Figures 5 and 8). Only single frequency data was available, and while the engines used had been tuned for consumer data, they were not specifically designed for this class of data.
Next-Generation Phones
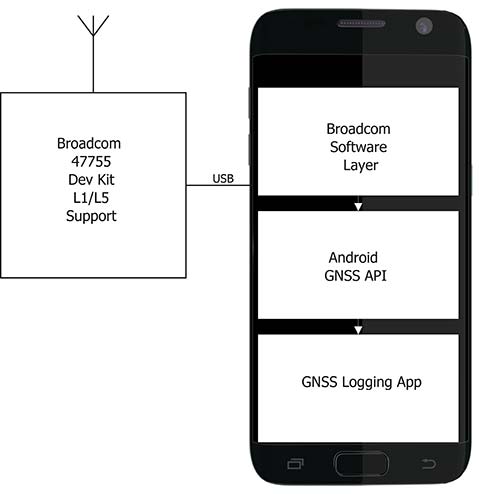
Within the next couple of years improved chipsets are expected to be available to consumers that will result in improvements in achievable positioning performance. In May 2017, Broadcom provided us with a development kit for its next generation L1/L5 multi-system BCM47755 GNSS chipset. This allowed us to assess what may be possible when improved GNSS chipsets are integrated in the next generation of cellular devices.
Figure 10. Broadcom BCM47755 development system.
The development environment included the GNSS chipset with an external antenna port so both a cell-phone equivalent antenna and a precision antenna could be compared. This allowed us to evaluate the impact of the antenna performance on the GNSS observables and positioning results. The Broadcom GNSS development system communicates via USB to a Samsung S7 phone and publishes data via the Android GNSS measurement API so the equivalent data flow of an integrated cellular device is maintained (see Figure 10).
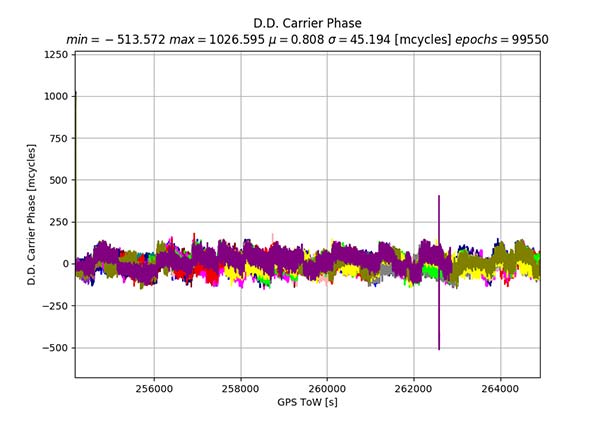
In our ION paper, we showed the typical phase double-difference residuals observed from current Android devices. The Broadcom BCM47755 originally provided similar performance, although it also supports GPS L5 and Galileo E5A. In November 2017, Broadcom provided a firmware update that resolved the sub-cycle phase issues. With the updated Broadcom software, the double difference carrier residuals for GPS L1 on a zero baseline when differencing a precision receiver to a Broadcom BCM47755 are shown in Figure 11.
Figure 11. Precision GNSS to Broadcom BCM47755 zero baseline double difference carrier-phase residuals.
The standard deviation is 45 millicycles which is approximately 8.6 millimeters (mm). This is substantially better than earlier implementations of the Android GNSS interface (see Figure 7) and sufficient to perform RTK ambiguity resolution.
The rest of the results in this article were obtained with the improved firmware along with a new precision position engine. This engine was designed from inception to support GNSS measurements with differing quality and so can more optimally process the Android GNSS data. The effect of the improvements to the Broadcom firmware and the change in the processing engine can be seen if the results in our ION paper are compared to the data in this section.
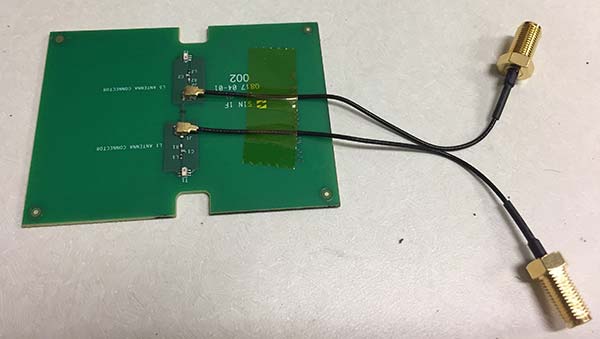
To attempt to model what may be possible with a phone based on a next-generation chipset, a cell-phone equivalent antenna provided by Broadcom was used in some of the tests with the development system, as shown in Figure 12. This device has separate feeds for L1 and L5.
Figure 12. Cellular equivalent antenna.
Datasets were collected with the multi-frequency GNSS BCM47755 device. The data was captured in the Android GNSS measurement API format and converted to proprietary format files for further processing. All data was collected in Sunnyvale, California.
Measurements from GPS L1/L5, Galileo L1/E5A, GLONASS L1 and BeiDou B1 were logged and analyzed. The Precise Positioning Engine (PPE) allows performing carrier-phase RTX and RTK and a pseudorange-based solution using the RTX corrections. Tests were performed by using a precision antenna and a cell-phone equivalent GNSS antenna.
With Precision GNSS Antenna
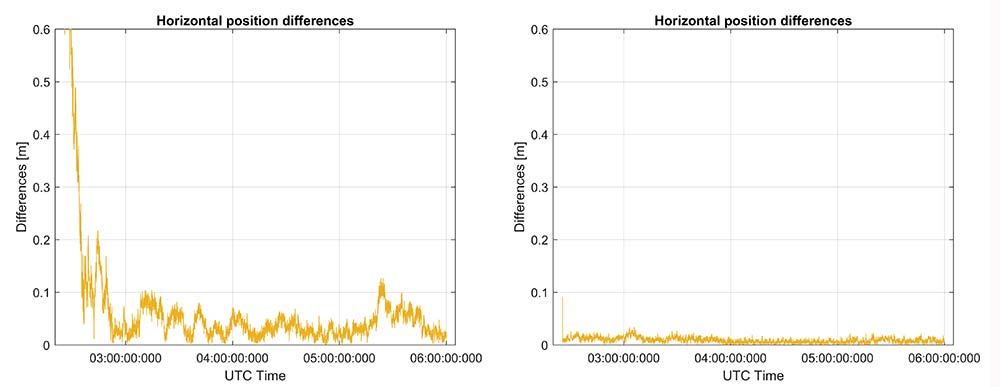
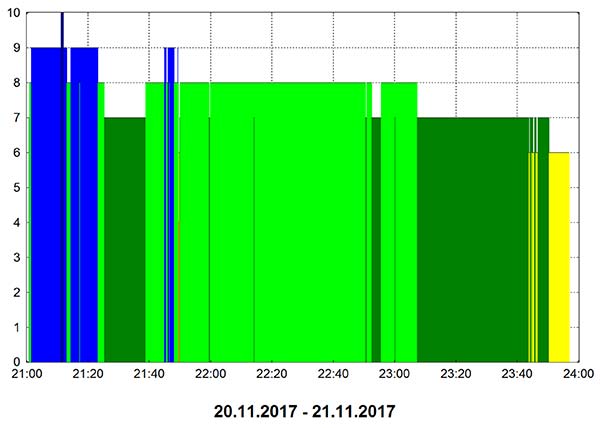
These datasets were collected on a zero baseline with a precision receiver to allow a direct comparison of results with a professional receiver. The first test was on Nov. 22, 2017, where the Broadcom GNSS chip and the receiver were connected to the same professional antenna.
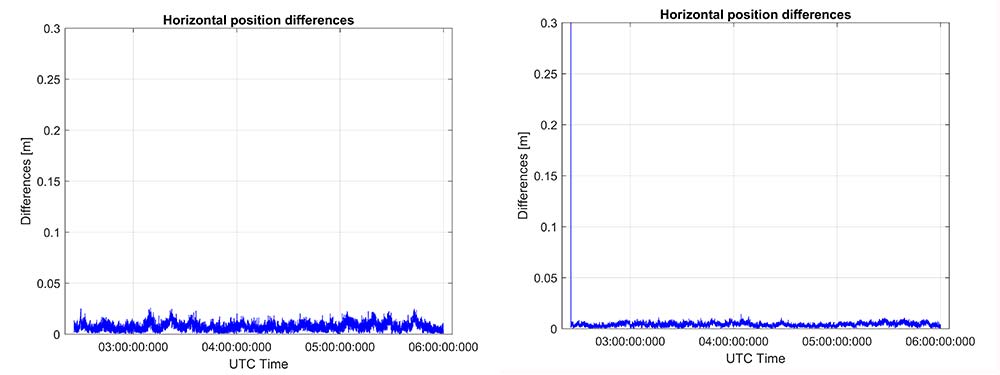
As seen in Figure 13, both GNSS receivers provide centimeter-level accuracies after some convergence time. With the current satellite constellations, only a third of the GPS satellites have L5 and only about half of the E5-capable Galileo constellation is in space. During this 3.5-hour test, the number of dual-frequency measurements processed by the engine that used the Broadcom chipset — data that does not support L2 — ranged between 6 and 10 satellites (Figure 14).
Figure 13. RTK performance for a 3.5-hour dataset sampled on Nov 22. Broadcom chip at left and precision chip at right. A short baseline was used — precision antenna.Figure 14. Number of GPS L1/L5 plus Galileo E1/E5A dual-frequency measurements used by the position solution based on the Broadcom chipset — precision antenna.
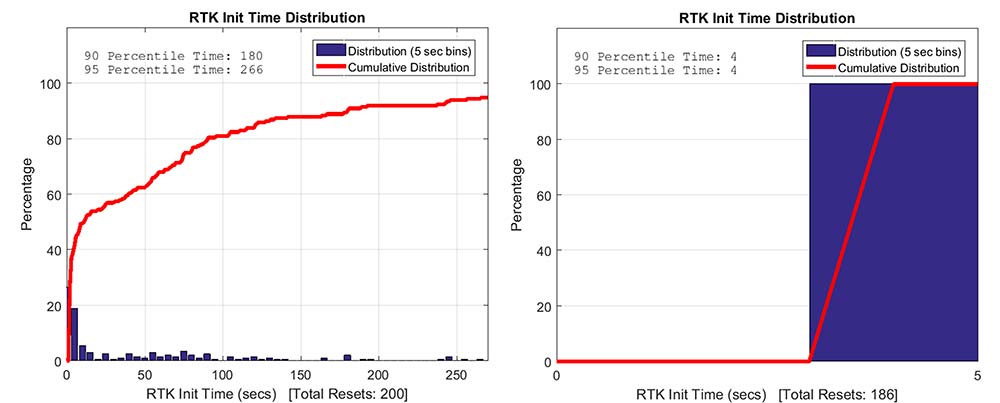
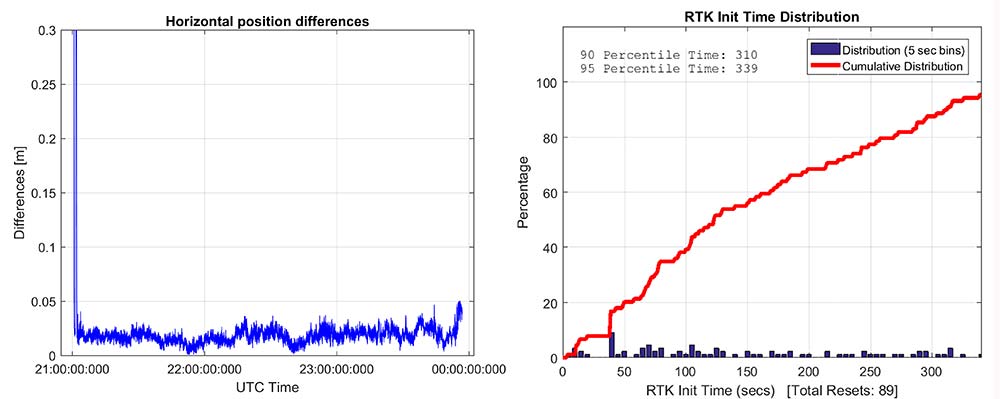
Convergence times were measured with post-processing tools by splitting the datasets into individual time spans. Figure 15 shows that the consumer GNSS chipset is able to get fixed ambiguity solutions but it takes considerably more time (266 seconds versus 4 seconds) for the 95% of initializations. However, the system is fixing ambiguities and provides centimeter level positioning.
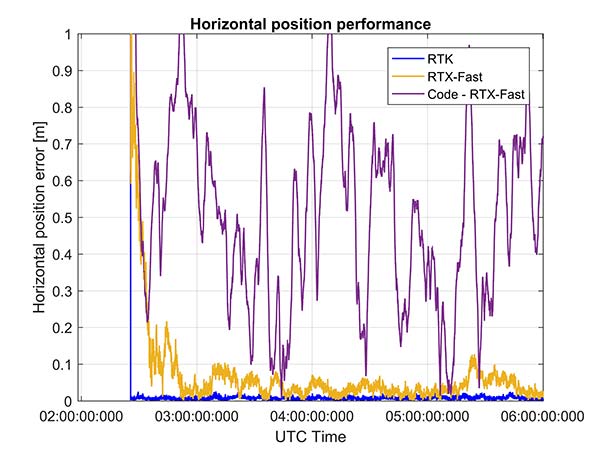
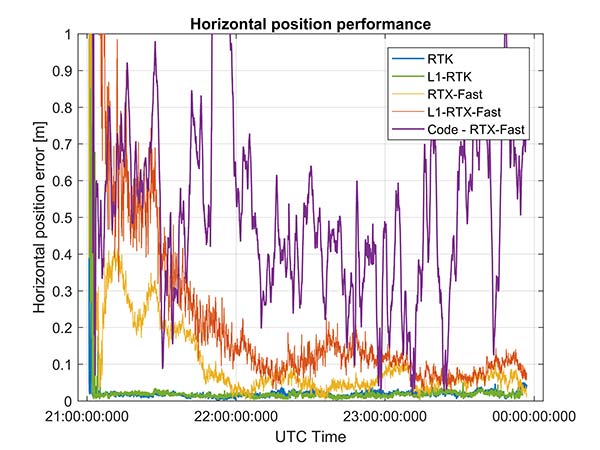
The same datasets were also processed with RTX-Fast in California. Thus the base station data was replaced by a global/regional correction stream received from an internet-based data source (Figure 16).
Figure 15. RTK initialization performance, dataset sampled on Nov 22. Broadcom chip at left and precision receiver at right — precision antenna.Figure 16. RTX performance for a 3.5 hour dataset sampled on Nov. 22 (Broadcom chip at left and Trimble chip at right) — precision antenna.
Horizontal accuracy for Broadcom reach 10 cm while the precision receiver reaches better than 3 cm. The degradation is in part due to the difference in quality of the carrier phase and the different number of dual frequency satellites processed. Precision devices provide measurements on E1/L1, L2 and L5/E5 providing at least dual frequency data from GPS, GLONASS, Galileo, BeiDou and QZSS.
The Broadcom chipset tested provided dual frequency GPS and Galileo along with single-frequency GLONASS and BeiDou; however, due to limited BeiDou constellation visible in California, data from this constellation was not used.
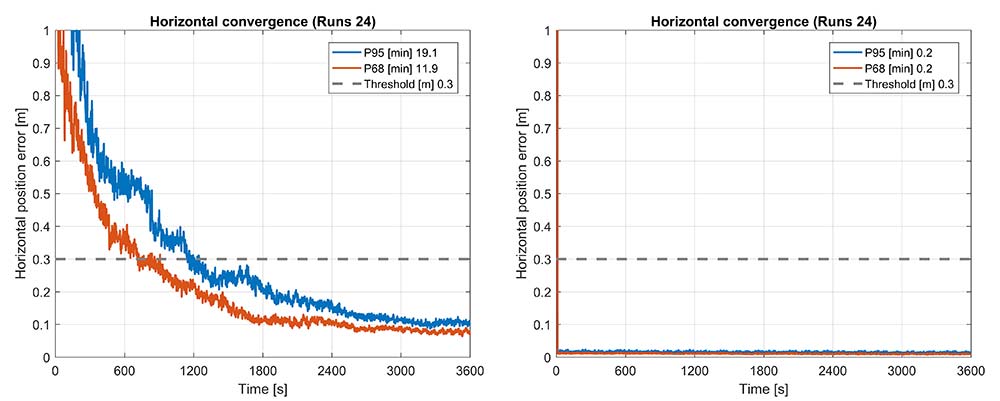
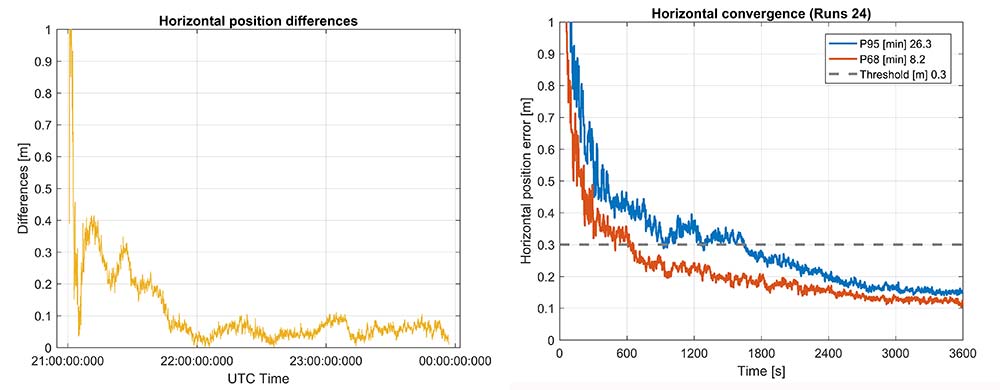
Convergence was also analyzed and is shown in Figure 17. From the data, we generated 24 convergence runs by taking one hour, progressively shifting the start time by 5 minutes and running the data with different start times through the PPE engine. This produced 24 runs, which were translated into 68% and 95% convergence statics shown.
Figure 17. RTX convergence performance for a 3.5-hour dataset sampled on Nov. 22. Broadcom chip at left and precision chip at right — precision antenna.Figure 18. Code RTX performance for 3.5-hour dataset sampled Nov. 22 and corresponding RTK and RTX phase solutions — precision antenna.
The RTX-Fast solution for Broadcom reaches 30 cm horizontal error in 68% of the cases in approximately 12 minutes. The RTX-Fast convergence using precision GNSS data is near instantaneous as can be seen in the right of Figures 16 and 17, reaching centimeter accuracy.
The code position solution using the RTX correction stream provides sub-meter positioning (Figure 18).
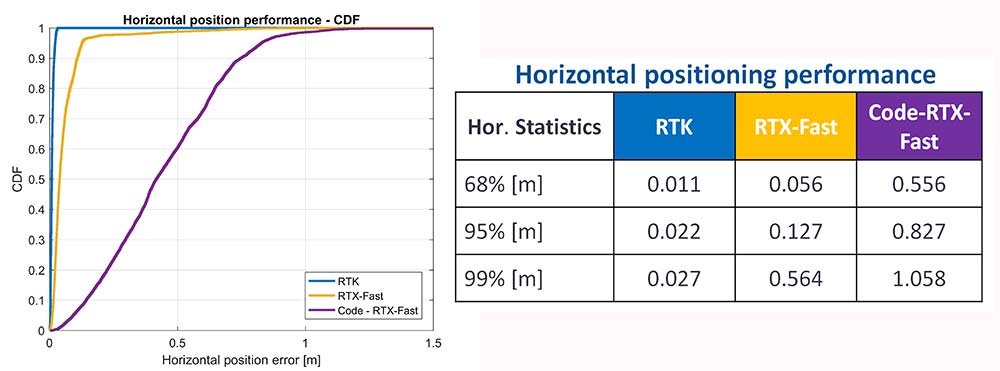
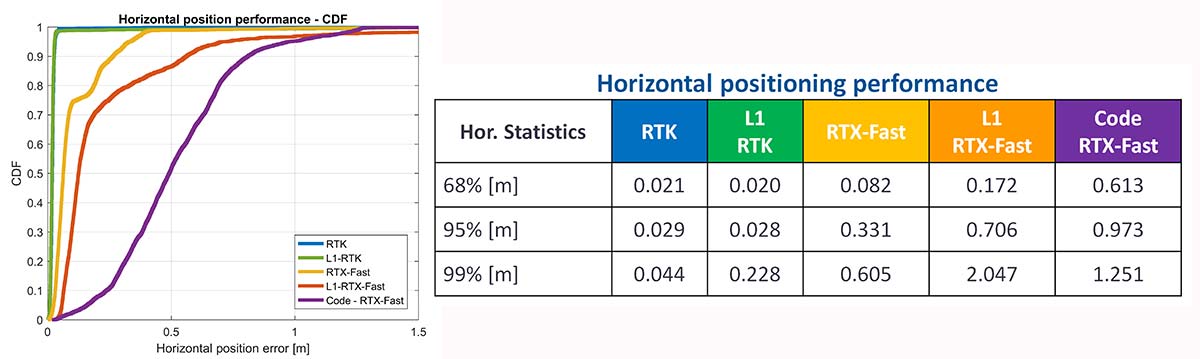
As a summary, the cumulative distribution function plots (Figure 19) show the performance differences for this static environment, on Nov. 22.
Figure 19. CDF plots for the different PPE position solutions — precision antenna.
Cell-Phone GNSS Antenna Results
Similar tests were performed using an external cell-phone GNSS antenna, which is close to the antenna used in a typical smartphone. RTK performance shows centimeter-level accuracies and reasonable convergence times, which are slightly worse than the results with the professional antenna (Figures 20–24).
Figure 20. RTK positioning and initialization performance for the Broadcom chip and the cell antenna sampled on Nov 20 — cell-phone GNSS antenna.Figure 21. RTX-Fast positioning and convergence performance for the Broadcom chip and the cell antenna sampled on Nov. 20 — cell-phone GNSS antenna.
In general as expected we achieve worse performance when connected to the GNSS cell-phone antenna for all the different positioning modes. For the cell antenna we also generated single-frequency RTK and single-frequency RTX-Fast position solutions and compare it with a code positioning solution.
Positioning Engine in Android
Figure 22. Number of GPS L1/L5 plus Galileo E1/E5A dual-frequency measurements used by the position solution based on the Broadcom chipset — cell-phone GNSS antenna.
The results presented in this article captured GNSS data using the Android API and then post-processed the data using PC versions of the position engines. A significant amount of data has been captured and analyzed using this method.
For the purpose of real-world demonstration the PPE has been implemented in an Android app to be used in cell phone devices. This PPE is able to provide RTK, RTX and code based positioning technology in one single PPE library.
The app has been tested running on a Samsung S7 connected to Broadcom’s new chipset development kit as well as a Nexus 9 tablet that uses an older generation GNSS chipset.
Figure 23. Code RTX performance, the dataset sampled Nov. 20 and corresponding RTK and RTX phase solutions — cell-phone GNSS antenna.
Future work will refine this solution as well as evaluate how well the system works when mobile. The data collected in this article operated in an environment with a clear view of the sky. We plan to characterize what happens when the platform moves with both pedestrian and automotive dynamics, as well as the effects of body masking and challenges with changes to the GNSS antenna reception pattern when the phone is held.
Summary
While this article has highlighted that sub-meter and centimeter accuracy have been achieved in a laboratory environment, there are many challenges to be addressed before centimeter accuracy in a phone can be achieved with performance suitable for users in real-world environments.
Figure 24. CDF plots for the different PPE position solutions for cell antenna dataset.
The challenges include very high multipath, significant differences in the tracking performance between different devices, and high rates of cycle slips. As very few Android-based devices provide continuous phase, a pseudorange/Doppler-based engine has been modified to accept Android data.
Based on the testing with existing devices it is possible to achieve position solutions of 1–2-meter accuracy in ideal static scenarios. This is a significant improvement in accuracy for Android based devices.
Figure 25. PPE engine on a Samsung S7 with a Broadcom BCM4775 evaluation kit.
However, as performance differences were observed between different mobile devices significantly more data needs to be collected over a larger set of devices to review the repeatability of these preliminary results from existing Android devices.
The Broadcom BCM47755 development kit for a dual-frequency GNSS chipset intended for future phones has allowed us to review the potential position performance that may be achievable in a handset in a few years.
By connecting this next-generation GNSS chipset to a GNSS antenna typical of a cellular device and comparing the performance from a precision GNSS antenna, we’ve shown for the first time that it is possible to produce precision positions from a static cellular class GNSS device in ideal conditions at the centimeter level with both an RTK solution and a PPP solution.
However, due to the significantly higher measurement noise and high multipath from the cellular device’s GNSS antenna, the convergence times to reach centimeter level remain a challenge; although using dual-frequency phase data from a cellular GNSS chipset with a PPE and RTX service, the position is very rapidly sub-meter.
Future work will focus on analyzing how the performance changes when operating in the normal user environment. The effects on the measurements of user motion, body masking and de-tuning of the antenna when the device is held need to be quantified. The Nexus 9 tablet used in this article does not have integrated cellular. The Broadcom development kit connects to the phone via a cable and is also not integrated into the handset.
We will be evaluating what may happen with a more integrated unit to make sure emissions from devices with integrated cellular very close to the GNSS antenna do not result in further degradation.
As the position performance is very sensitive to the quality of the antenna from both multipath and cycle slips due to low C/NO and deep fades, we’ll also evaluate how well the performance of the PCB-based GNSS antenna, which is part of the BCM47755 evaluation kit, matches current handsets.
Acknowledgment
This article further develops work first shown in an ION GNSS+ 2017 paper, “On the Path to Precision — Observations with Android GNSS Observables.”
Manufacturers
Trimble CenterPoint RTX is the satellite orbit and clock corrections service used here, enabling a PPP-like positioning with ambiguity fixing, providing better than 4 cm with typically less than 10 minutes’ convergence.
RTX-Fast functionality in Europe and parts of California uses regional atmospheric models to provide better than 4-cm horizontal in typically less than one minute. When precision and professional receivers and RTK engines are mentioned in this article, they are Trimble devices, the BD940 receiver in some cases.
A Trimble Zephyr 3 antenna was used in many tests shown here.
By Jason Penkethman, Chief Product Officer at Spireon
Fleets looking to take their operations to the next level look to GPS solutions for the obvious benefits — driver/vehicle location tracking, driver behavior monitoring, improved efficiency — and some that are not so obvious, such as making a positive impact on the environment.
“Going green” can be an arduous task, requiring constant calculations and adjustments to ensure that a fleet’s reduced environmental impact doesn’t negatively affect normal operations.
Fortunately, GPS fleet management solutions have come a long way and go far beyond simple geolocation. We live in an age where technology empowers fleet managers to go green – both environmentally and fiscally. And with effective communication and transparency, even drivers who once may have perceived fleet tracking as “big brother” are now seeing how joining the green initiative puts green in their own pockets.
The Case for Smarter, Eco-friendly Workdays
No matter the size of the fleet, reducing unnecessary drive time saves time, gas, and reduces carbon footprint. When last minute changes or emergencies arise, fleet tracking allows managers to dispatch the nearest driver for faster, more effective resolution. Fleet tracking also allows better planning of a driver’s day with proximity as a guide.
Image: Spireon
Eliminating Paper Waste. To properly manage a fleet, there is a seemingly endless stream of logs and diagnostics for drivers, cargo, vehicles and more. Implementing GPS tracking will cut back on the paperwork for managers and drivers alike by automating what once were manual processes and making compliance with new federal regulations such as the ELD mandate and the Food Safety Modernization Act a breeze.
Cutting Unnecessary Emissions. Idling and abrupt acceleration or braking are the biggest culprits of wasting gas and producing excess emissions. Thanks to GPS logging, these can be avoided as feedback is provided to fleet managers and drivers, allowing active awareness for better driving habits.
Better Maintenance, Better Mileage. Second to employees, vehicles are a fleet’s most important asset, and both need proper attention and care to succeed! While drivers can tell a fleet manager what they need, many vehicles won’t until it’s too late. With modern GPS devices, diagnostics are constantly run, keeping fleets informed and instantly aware of upcoming maintenance or surprises to keep drivers safe and vehicles running at maximum efficiency.
Creating Driver Advocates
While the benefits of GPS fleet tracking seem clear, overcoming driver apprehension sometimes causes pause for the business owner looking to implement a solution.
However, drivers can become GPS’ greatest advocates with clear communication and transparency. It’s important to explain that GPS tracking works to a driver’s advantage when there are records of driver performance in the event of an accident, medical emergency or crime.
Fleet managers can use the data to support drivers if they are accused of wrongdoing by customers or an insurance company. Additionally, the system can be used to offer incentives including higher base pay, recognition or bonuses to the best performing drivers.
Fleets should convey that the main goal of GPS is not to point fingers at drivers or to spy on them, but rather to make the business enterprise more efficient and competitive.
Part of the process necessarily means an overall improvement in their working conditions such as not having to call them all the time to keep track of their positions, sending the closest convenient driver to a location, establishing routes and schedules that are manageable and — yes — monitoring their behavior.
This, however, is an incentive to keep drivers under the speed limit and make them feel more responsible — not least, protecting against legal and safety issues. In our experience, good employees have no problem with accountability and, in fact, welcome it as it sets them apart from less productive co-workers.
Greenery on the Scenery
Fleet tracking also helps to explain the savings in company costs made on fuel, maintenance and administration jobs.
Fleet managers should explain to drivers how the new process can generate bonus programs, reduce customer call-backs, cancellations, complaints and paperwork (for timecards) and improve upon driver training.
GPS will make for a better company with benefits everyone should realize and readily appreciate. The healthier the company, the more secure the jobs within it. Everyone benefits from a fatter bottom line, and job security is nonexistent without profitability. Helping drivers to understand why the fleet is adopting the solution will help recruit them toward a positive outcome.
Whether a fleet business is interested in going green for the environment, or for its own profitability, GPS tracking solutions — and gaining driver buy-in — create a powerful catapult to achieving goals rapidly and effectively.
Jason Penkethman is chief product officer at Spireon and is responsible for leading innovation in the company’s products and platform, and creating vehicle connectivity solutions to maximize customer value.
Positioning on a micro-scale is the task of a new sensor that reports on range of motion (ROM) achieved in stretching exercises and other post-operative activities by at-home patients after discharge from hospital. Telit, a company active in sensors for the Internet of Things (IoT), announced that U.K.-based 270 Vision Limited has selected Telit’s BlueMod+SR Bluetooth module for its BPMpro Mark 2 sensor for remote, precision measurement of patient ROM.
The BPS (Body Performance Measurement) wearable sensor is a medical device that measures patient ROM before and during rehabilitation. Post-surgery, patients are discharged to be remotely monitored at home as they undertake their daily routine using a BPMpro sensor. The captured sensor output displays on a patient tablet running BPMpathway software and streams live to the clinician, who can use this data to assess the patient’s progress. With the patient recovery data collected by BPMpathway, clinicians can tailor an orthopedic patient’s post-operative support to meet their individual needs, without having to wait for a face-to-face consultation.
The BlueMod+SR module is a very small form factor dual-mode Bluetooth 4.0 module (17 x 10 x 2.6 mm). Range in line of sight is about 100 meters. Dual mode means it supports classic Bluetooth basic rate (BR) and enhanced data rate (EDR) operations as well as Bluetooth low energy (LE).
New app promises better-than-GPS urban guiding
Attention, GPS World readers living in or visiting Central London, Mountain View, California or San Francisco. Public beta of a new app (iOS only) will take you by the hand — er, phone — and lead you around the fair city; those cities only, at present. More intriguing, it claims to deliver “better than GPS accuracy.”
This augmented reality (AR) navigation employs an AR-native framework, Apple’s ARKit. Blippar touts its AR City app for something it calls “urban visual positioning…which localizes users with higher accuracy than GPS, thanks to computer vision.” The app uses visual inertial odometry, interpreting movement seen through the camera, to minimize position errors, that is, in a sense, to correct GPS.
Holding the phone in front of one’s face in tourist fashion, the user receives nearby points of interest based on what he or she can actually see. The app feature three layers of information:
AR Basic Navigation. A visualization of walking routes through augmented reality.
Enhanced Map Content. Overlays of information and content related to user location in AR — for example, streets and points of interest.
Urban Visual Positioning. Recognition, positioning and directional information via computer vision.
AR basic navigation, available everywhere that is supported by Apple Maps, visualizes routes with arrows shown in augmented reality. AR basic navigation uses GPS to estimate the absolute position of the user, and visual inertial odometry (VIO) to track their local movement. Blippar integrates GPS and VIO by building on the ARCL library, which uses Apple’s ARKit for VIO and Core Location for GPS.
GPS alone doesn’t give a high enough level of accuracy when looking at the map and has an average error rate of 16 m in cities, according to Blippar, which claims its urban visual positioning provides more than twice its accuracy.
Microsemi Corporation is offering new hardware and software options for its SyncServer S600 series of time servers and instruments. The enhancements improve time synchronization over enterprise Ethernet networks and supply timing signals for improved military radar operations and satellite uplink communications.
“The SyncServer S600 series provides highly accurate, reliable and secure time for a variety of applications, not the least of which are the extremely precise low phase noise 10-MHz signals used in military radars and satellite uplinks,” said Paul Skoog, senior product line manager at Microsemi. “We’re committed to helping our customers improve the performance of their systems by improving the performance of ours. These high-quality timing signals enable radars to track difficult targets as well as to improve the quality and data throughput of satellite communications systems.”
Enterprise and financial customers also look to the SyncServer S600 series to meet the timing and synchronization needs of their rapidly evolving networks, particularly for compliance purposes such as the European MiFID II directive, which specifies highly stringent time accuracy requirements for stock trading systems.
Also applicable for laboratories and test and measurement companies, this latest release of Microsemi’s S600 hardware and software includes support for the IEEE 1588 multiport, multi-profile Precision Time Protocol (PTP), which allows the S600 to operate as an independent grandmaster clock on each Ethernet port — delivering cost savings and network deployment flexibility to customers. This is coupled with a new 10GbE interface to easily interoperate with a wider variety of network and stock trading topologies.
The newly enhanced SyncServer S600 and S650 can be equipped with two 10 GbE Ethernet small form-factor pluggable (SFP+) ports for customers needing to maximize PTP grandmaster performance in a cost-effective 1 rack unit (1U) chassis.
In addition, the S650 can measure the accuracy of PTP hardware slaves that are synchronized to the S650 grandmaster by way of a new external 1 pulse per second measurement option.
The combination of these devices’ new hardware and software features support Microsemi’s expanding leadership position as a cost-effective enterprise PTP grandmaster provider delivering accurate and reliable time to critical systems.
Microsemi’s SyncServer S600 series meets the time and frequency requirements of multiple vertical markets, particularly the global military radar market, which is estimated to reach $10 billion by 2024 with a compound annual growth rate of 2.6 percent between 2016 and 2024 according to market research firm Variant Market Research.
The firm also identifies how radar in military applications is widely used for air traffic control, early warning detection of missiles, navigation at sea and surveillance of air and ground. The versatile SyncServer S600 series meets the needs of today’s demanding timing requirements and scales to meet the needs of the future.
“If timing is to become mission critical, redundant means of distributing timing information is essential,” according to NIST.
NIST hosted the “Time Distribution Alternatives for the Smart Grid Workshop” at its Gaithersburg, Maryland, campus on March 21. The information gained will inform future NIST, U.S. Department of Energy, national laboratories and private sector technical programs and strategic planning.
The workshop consisted of experts on both electrical power and wide-area time distribution. The experts came from industry, utilities, academia and government.
The findings cover desired future characteristics, targets, challenges and barriers to adoption of time distribution alternatives; and priority R&D areas for time distribution alternatives.
Potential alternatives to wide area distributed time synchronization include Enhanced WWVB (radio signal broadcasting), eLoran (hyperbolic radio navigation) and the IEEE Wide Area Precision Time Protocol (PTP – master slave clock synchronization).
Results of the workshop illustrate the need for alternatives to existing GPS timing systems as well as backup systems and many of the challenges that need to be addressed to develop and implement alternatives. Some of the overarching themes that emerged include the following:
While a number of potential alternative exist, they will require further infrastructure, research and concerted investment to implement and demonstrate their potential to replace, supplement, back up, or fill gaps in existing GPS systems.
Potential alternatives may need to be combined in ensembles to fill gaps, create the needed redundancies, and supplement GPS-based timing.
Future alternatives to GPS will need to have the same or better levels of accuracy, resilience, security, trustworthiness, and availability to supplant existing systems; a diversity of timing distribution systems may be needed (terrestrial, communication-based, wireless, etc.).
Dependency on space-based systems is currently strong due to their perceived reliability; there is limited awareness of the possible adverse impacts of timing failure events in such systems (and few backups exist).
Developing and using existing alternatives and new technologies, and integrating these with legacy systems will require standards and use cases to enable new technology, architectures, and interoperability among systems.
Better understanding of attack and failure threat modes is needed to estimate and demonstrate the true consequences of timing failures in systems based entirely on GPS.
The U.S. Supreme Court heard arguments last week on a case that could determine whether authorities can search cellphone location data without a warrant.
In Carpenter v. U.S., the Court will eventually rule on whether the Fourth Amendment of the U.S. Constitution’s Bill of Rights, enacted in 1791 to safeguard citizens’ rights against unreasonable searches and seizures, extends to cover personal cellphone records tracking user location.
The case began when police used records, obtained from a phone company and drawing on cell-tower location, to show that an individual’s cellphone was used in the vicinity of several armed robberies in Michigan and Ohio in 2010 and 2011.
The appellants contend that the government had violated the Fourth Amendment when it collected their cellphone location records without a warrant. A federal appeals court ruled against the appeal, finding the Fourth Amendment doesn’t “yet” extend to cellphone location data.
That court distinguished between the “content” of a communication and the “information necessary to send it.” The government can’t read letters or emails or listen to wiretapped conversation without a warrant, but it is entitled to the metadata used to send such content — in this case the phone company data showing in which tower’s cell area the phone was activated.
“The business records here fall on the unprotected side of this line. Those records say nothing about the content of any calls,” the court ruled. “Instead the records include routing information, which the wireless providers gathered in the ordinary course of business.”
The Supreme Court, in hearing the appeal on this decision, is expected to review — and possibly revise — its heretofore opinion that when users share information with a third party, such as a bank or telephone company, they lose the expectation that it will remain private. At question is whether cellphones have activated a new era of privacy expectations, in essence, whether legal doctrine needs to be subject to updates for the digital age.
One tenet that no one questions is that cell phone users have no idea to what extent their phone companies know where they go and how long they stay there. Whether they care or not, or whether they are willing to sacrifice some amount of privacy for the convenience of cell phone access, remains to be seen. The limits for this have been explored but never completely settled, in controversies around Facebook’s (and others’) access to and use of customer data and profiles.
Apple, Facebook, Google and Verizon have all filed an amicus (“friend of the court”) brief in Carpenter v. U.S. The tech gargantua seem to want, on the one hand, to discourage the possibility of government and law enforcement being able to access location data without a warrant, while also maintaining a clear and unencumbered route for themselves to use it. They argue that “Fourth Amendment doctrine must adapt to the changing realities of the digital era” and that “rigid analog-era rules should yield to consideration of reasonable expectations of privacy in the digital age.”
After a related 2012 Supreme Court decision that attaching a GPS tracker to a car without a search warrant violated the Fourth Amendment, Justice Sonia Sotomayor wrote that the so-called third-party doctrine was “ill suited to the digital age” and that privacy case law should adapt to changes in society’s views that are occurring thanks to smartphones and other technology.
For a summary of the arguments presented to the Court on November 29 in Carpenter v. U.S., see the SCOTUS blog here. Further developments in the case will appear on this page, and viewers may sign up for push updates as well.
In 2008, GPS World published an editorial on this subject, in the guise of a parodized future film noir scenario, “The Call Tease Factor.” An expandable image appears at left. The essay opined that “Government agencies and police routinely tracked cell users’ location without a warrant or court oversight. . . . Challenges had faltered, and no one seemed to notice any more, or care much.”
“Privacy, as least as far as location, no longer existed.”
Tampa, Florida, took a big step toward its goal of becoming a smart city on Nov. 13, when the Tampa Hillsborough Expressway Authority (THEA) hosted its first public demonstration of connected car technology.
THEA plans to equip 1,600 privately owned automobiles with connected vehicle technology by mid-2018 as part of the Tampa Connected Vehicle Pilot.
In the project, volunteers’ automobiles will be equipped to communicate with downtown traffic and pedestrian signals to enhance safety, improve traffic flow and reduce emissions of greenhouse gases. Ten buses and 10 streetcars will also be equipped.
Tampa is one of three sites deploying the technology as part of the U.S. Department of Transportation’s Connected Vehicle Pilot Deployment Program. The other two sites are New York City and the Interstate 80 corridor in the state of Wyoming. Tampa’s project is the only one that involves local residents driving their own cars.
THEA is now recruiting volunteer drivers and pedestrians for the Tampa Connected Vehicle Pilot. Participating drivers commuting on the equipped expressway will receive a warning when traffic backs up, or when approaching a curve at an unsafe speed. Drivers who near pedestrians in certain crosswalks also will receive alerts.
Pedestrians will be able to participate in the pilot by installing an app on their smartphones that will enable them to request a “walk” signal at certain intersections, and issue audible alerts if a bus or streetcar is moving nearby.
OriginGPS teamed with Friendly Technologies, an internet of things (IoT) and device management company, and Humavox, a wireless charging expert, to create an IoT-connected baseball in six weeks.
Friendly’s IoT platform interfaces the OriginIoT (cellular IoT) system to enable communication, management and a graphical user interface, while Humavox’s compact Wi-Fi-charging bowl re-energizes the system.
The demonstration — developed in six weeks without a single line of embedded code or RF engineering — was showcased at CTIA Mobile World Congress 2017, in San Francisco Sept. 12–14.
The OriginIoT effectively resolves inherent costly issues to IoT developments — namely long project cycles and required embedded software expertise. It expedites development cycles, and eliminates the need for embedded coding and RF engineering, resulting in substantial cuts in development resources, the companies said. With OriginGPS’ cellular-GNSS integrated in the IoT cellular system, the smart baseball is a proof of concept for rapid and accessible IoT development.
Friendly’s One-IoTTM platform enables service providers to manage the data and configuration of millions of devices on a single platform, accelerating deployment and streamlining IoT service management, while cutting operational costs.
Microsemi Corporation has launched a new IEEE 1588 timing synchronization module, offering a complete self-contained platform for customers to implement IEEE 1588 network timing client protocols.
The solution, which consists of hardware, firmware and software, combines capabilities from Microsemi’s broad product portfolios by leveraging the company’s SmartFusion2 system-on-chip (SoC) field programmable gate array (FPGA), ZL30363 IEEE 1588 phase-locked loop (PLL) and VSC8575 Ethernet PHY devices.
Microsemi’s new IEEE 1588 timing synchronization module streamlines customers’ developments to add synchronization network timing to their designs, simplifies the sourcing process and reduces development time while providing an easy integration.
The module also includes drivers, servos/algorithm firmware, IEEE 1588 Precision Time Protocol (PTP) stack software, a user guide and reference board schematics to deliver a fully tested chip-set solution from a trusted tier-one vendor.
The IEEE 1588 timing synchronization module blends Microsemi’s expertise in nanosecond-level accurate timestamping for IEEE 1588 via the VSC8575 Ethernet PHY; embedded IEEE 1588 protocol engine and servo via its SmartFusion2 SoC FPGA host processor; and high precision clock generation, holdover and reference switching via its ZL30363 system synchronizer.
The solution is addressed via a command line interface to minimize software integration efforts.
The combination of these capabilities makes the new solution suitable for applications within the industrial networking, smart grids, communications, defense and data center markets.
Depending on the applications holdover and reliability requirements, either an XO, TCXO or OCXO can be used to provide holdover supported by the IEEE 1588 timing synchronization module.
According to a 2017 GNSS Market Report, issue 5, the timing capability offered by satellite navigation systems is at the core of most vital infrastructures; telecom networks operation, energy distribution, financial transactions and TV broadcast are some examples of areas where a GNSS is used for timing or synchronization purposes.
The annual shipments of GNSS devices used in the timing and synchronization market will exceed 300,000 units in 2017 and are expected to grow at a compound annual growth rate (CAGR) of 5.3 percent over 2017-2025.
Catering to this growth opportunity, Microsemi’s new IEEE 1588 timing synchronization module is designed specifically for such applications, which require much more precise timing, including base stations and small cell markets for 5G, 4G, 4G LTE, LTE-Advanced, microwave and millimeter wave based fixed wireless networks, smart grids and secure edge networks.
Other key features of Microsemi’s new IEEE 1588 timing synchronization module include:
High accuracy timestamping of less than 4 nanoseconds
Frequency and phase synchronization
Holdover with initial accuracy of <1ppb and long-term holdover of 1.5µs over 24 hours using the appropriate performance OCXO
Hitless reference switching
Precision frequency and phase control
Multiple profiles, including IEEE 1588-2008 Annex J.3 End-to-End
Cloudstreet and Roger-GPS have successfully delivered a demonstration of the ability to enable any 4G/LTE network to support mission-critical connectivity for public safety.
Cloudstreet calls itself a “network slicing company.” Network slicing allows multiple virtual networks to be created on top of a common shared physical infrastructure. Roger-GPS, a Nokia spin-off, is a GNSS repeater company.
The two Finland-based companies presented the live proof-of-concept before a gathering of 50 public safety organizations participating in the Critical Communications Broadband Group’s plenary session hosted by Nokia at the Critical Communications Finland Conference on Oct. 27.
The demonstration marks a watershed in critical communications proving the ability to support life-critical connectivity for public safety through “local control“ functionality, Cloudstreet said.
Building toward this proof-of-concept, Cloudstreet has been working closely with the U.S. government’s Public Safety Communications Research (PSCR) group overseeing FirstNet, a critical communications initiative in partnership with AT&T established following the tragedy and communications system failures of Sept. 11, 2001.
Looking for a solution to the limitations of TETRA-style dedicated networks for public safety PSRC and Cloudstreet drew up a blueprint for local control functionality as an essential component of next-generation critical communications networks.
Enabled by Cloudstreet’s Application-Aware Network Slicing platform, Local Control in the mobile network context provides public safety and critical communications operatives the ability to secure guaranteed, fail-safe connectivity to meet the demands of any data or communications applications required in the field.
Coupled with Roger-GPS’s government-grade GNSS repeater, it allows signal base synchronization across limitless base stations, providing end-to-end QoS-adjusted mobile radio throughput for essential life-saving public safety applications.
“We’re pleased to unveil this solution that is sure to become a critical platform for future public safety networks,” said Mika Skarp, founder and CTO of Cloudstreet. “The importance of delivering local control functionality for critical communications cannot be overstated. Leveraging our dynamic application-aware network slicing platform along with key radio signal support and synchronization gives public safety operatives the guaranteed service levels they need to meet their life-saving mandates. Together with our partners and a wave of innovative product developers, applications like real-time body camera video capture and situation analysis over unified commercial mobile networks suddenly become a reality, and these are but the tip of the iceberg. We’re proud to be playing our part in making this possible.”