By Oliver Leisten and Viktor Knobe.
Styling for consumer usage has progressively miniaturized of the antenna package to tiny dimensions compared to a free-space wavelength, even as devices with these miniscule antennas are designed to work close to the absorbent tissues of the user’s body and in the electromagnetic maelstrom of city street levels. GNSS antennas have responded with significant advances.
The selection of the GNSS antenna, especially for small portable wireless devices, demands careful consideration of how it will interact with its expected environment. A physical appreciation can explain how many impairment factors can actually have a common cause: often the effect of human body-loading. This explanation starts with a counter-intuitive foundation: though the GNSS receiver does not transmit signals, for the sake of clarity we invoke the law of reciprocity and proceed with the conceptual thinking that the antenna is radiating outwards. This gives us a basis for understanding the causal physics of how the antenna shares energy with the immediate environment.
We can visualize the basic radiating action of the antenna by recognizing that it is a resonant component. We must consider what exactly is in resonance, because the antenna designer has two different design options. In the self-resonant configuration, the antenna can be considered to be resonating autonomously, forming the entire dipole of the antenna within the antenna body. Here, dimensions and topological structure act in conjunction with reflecting and absorbing features surrounding it to define where and how the antenna radiates.
In the second or probe antenna case, a larger radiating space can be configured by resonating the antenna with the housing together. The antenna typically forms a monopole counterpoised by currents and voltages in the housing. Here, the topology of the radiating system (antenna and housing) acts in conjunction with the near environment to define the radiation pattern.
The value of distinguishing these two configurations is clearly reflected in the contrast between their behaviors with regard to radiation efficiencies in different uses. We conducted an experiment with three example antennas. Each antenna was installed in as common a package format as was practically feasible to model the top portion of a slim-line demonstration platform, with dimensions typical of consumer devices and containing a conductive chassis 55 millimeters wide. Obviously, a probe antenna must be installed in a chassis in order to function, and this directed the experimental approach to be structured around a similar-housing methodology.
The probe antenna was a small metal and ceramic chip, and we compared its performance with a small microstrip patch antenna mounted horizontally in a broader but otherwise similar housing, and a hexafilar antenna mounted in an identically dimensioned housing. Strictly, the microstrip antenna is a single terminal element, but it can be considered as self-resonant as the resonance fields are very tightly constrained. Figure 1 plots the radiation efficiencies for benign free-space conditions (without body-loading) together, as frequency responses.

In benign open-field conditions the probe antenna has excellent efficiency performance and superior bandwidth compared to the two self-resonant configurations. Conversely, the self-resonant antennas (patch and hexafilar) have similarly narrow frequency-response bandwidths and lower efficiencies. We will show how it is important to repeat the test for realistic use scenarios that determine how close the antenna will be juxtaposed to the user’s biological tissues before concluding that the probe antenna is the best solution.
Antenna studies have shown that the bandwidth reduces very rapidly as the resonant volume of the antenna reduces. This accounts for the reduction in bandwidth shown in Figure 1 for the self-resonant antennas (microstrip patch and hexafilar) with respect to the probe antenna (chip). In the case of the probe, the resonant structure is the entire metal chassis of the device (in this case the circuit-board ground-plane) so that the resonant volume of the resonating system is much larger than those of the self-resonant structures.
To analyze the behavior of antennas in different use scenarios, it helps to consider the nature of resonance in antennas: open fields, with equal time average amounts of electric and magnetic field energy oscillating in space. These fields, induced by the time-varying voltage potentials and currents in the antenna, can launch a radiating wave into space because time-varying electromagnetic fields can carry or displace energy. We need to appreciate that this volume is where the so-called reactance fields exist, where field oscillations function as a sort of pump that propagates the electromagnetic wave. The antenna induces those fields in a configuration that manages the propagation of waves in useful directions and with desired polarization.
Any invasion of the reactance field region will disrupt this process and cause impairment. Whilst obstruction of the radiating fields far away from the antenna will just cause a masking effect, a similar obstruction in the reactance-field region can disrupt the basic process of generating radiation. The density of fields in the reactance field region is much higher than would be implied by the straightforward application of the inverse square law.
Use Near the Body
We evaluated the antenna types, installed in packages as thin as test antenna dimensions allow, to draw conclusions as to how they might operate in slim-line consumer devices held close to the user’s body. Figure 2 shows CAD diagrams of the three antennas installed in their respective test packages.

Consumer devices have drawn antenna technologies from traditional GNSS applications as well as from terrestrial mobile telephone origins. The overall evolution combines adaptation of the circularly polarized technologies (multi-filar and microstrip patch) into smaller body-loaded platforms with insufficient space for effective ground-planes, together with adaptation of the art of low-cost cellular-telephone embedded antenna technologies that were never developed for circular polarization. Taking our three solutions in their embedded test platforms, we can appraise their body-loaded efficiencies by testing them juxtaposed to a phantom head, providing a means of assessing impairment due to body-loading.
The phantom head in the loading experiment was filled with a tissue simulating liquid conforming to requirements for specific energy absorption measurements according to CENELEC and IEEE procedures. Comparing the antenna efficiencies for open-field conditions (Figure 1) and body-loaded conditions (Figure 3), reveals impairment to antenna efficiency in all three cases, with the most severe loss of approximately 80 percent by the chip antenna.

The self-resonant antennas suffered less impairment: approximately 30 percent reduction for the patch and 65 percent for the hexafilar antenna. The probe’s significant loss of efficiency is typical of this class of antennas, as the resonant fields are heavily loaded by the phantom head. The peak efficiency for this chip antenna has tuned downwards in frequency as the dielectric loading effect of the head-phantom introduced a regime of net higher relative dielectric constant (εr) into the resonance field region of the antenna system.
By contrast, the self-resonant antennas did not tune down in frequency as they were brought into proximity with the phantom head. This indicates that the resonance fields were not offered to the dielectric materials of the head phantom to an extent that materially changed the relative dielectric constant (εr).
Nevertheless, there is a significant difference between the impairment that develops between the patch and hexafilar cases as body-loading is applied, with the hexafilar solution losing more radiation efficiency than the patch antenna. There are two explanations for this difference.
The first is that the patch housing is simply larger, with a greater depth required to accommodate the patch antenna horizontally at the top of the device housing. On average this larger housing size spaces the resonant fields further from the phantom and from the lossy simulated head tissues.
The second explanation offers an insight into the symbiotic relationship between the hexafilar antenna and the demonstration platform’s vertically orientated housing. The horizontal ground-plane required for the patch antenna is inconvenient from the style and total integration cost point of view, but also ineffective as a ground-plane as it lacks sufficient width in a device styled to minimize depth. In this scenario the patch antenna is not getting much reflection uplift from the ground-plane; therefore there is little impairment when the device is body-loaded.
The hexafilar solution is designed to benefit from reflective uplift from the vertically disposed ground-plane of the device. This property is convenient for device packaging because it allows the hexafilar antenna to be integrated at a device corner. The installation of a large and effective vertically oriented ground-plane for the hexafilar case is, by contrast, highly convenient and potentially more cost-effective. When the device is not body-loaded, reflections from the vertically disposed ground-plane uplift the gain and efficiency of the hexafilar antenna. The important advantage over the chip antenna (which is also convenient for space-constrained designs) is that for the self-resonant hexafilar antenna, the frequency of resonance does not change for open-field and body-loaded cases.
Polarization, Pattern, Positioning
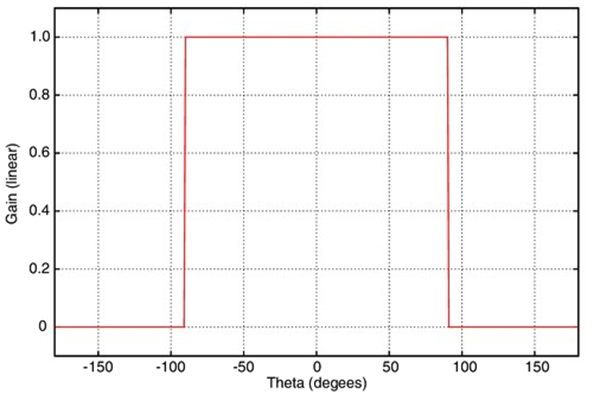
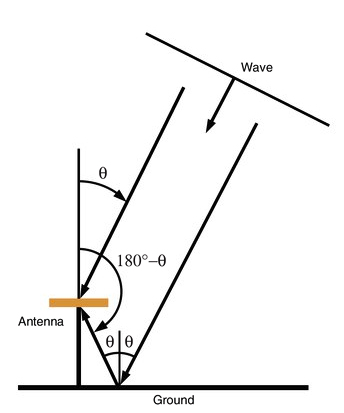
Sufficient data has now been presented to make an antenna selection on the basis of efficiency and styling. The probe antenna in the guise of a chip antenna provided the highest radiation efficiency in free-space, comparable radiation efficiency to the hexafilar antenna in a body-loaded use scenario, and the small physical size supports compact product designs. However, for GNSS applications we must consider wave polarization, especially if there is multipath scattering. GNSS systems employ right-hand circular polarization (RHCP) and ideally should use antennas with hemisphereically omni-directional antennas. The zenith gain of a circularly polarized antenna is expected to be 3dB higher than that of a linearly polarized antenna of the same efficiency.
If a GNSS terminal is equipped with an omni-directional but linearly polarized antenna, it can receive circularly polarized signals from all directions (albeit with a spatial average 3dB polarization loss). However, the positioning performance of such a terminal will be compromised because a linearly polarized antenna cannot discriminate between RHCP or LHCP, and reflections change the direction of spin of the circularly polarized wave.
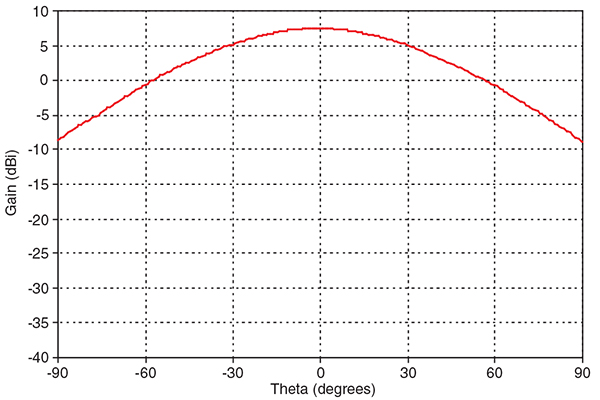
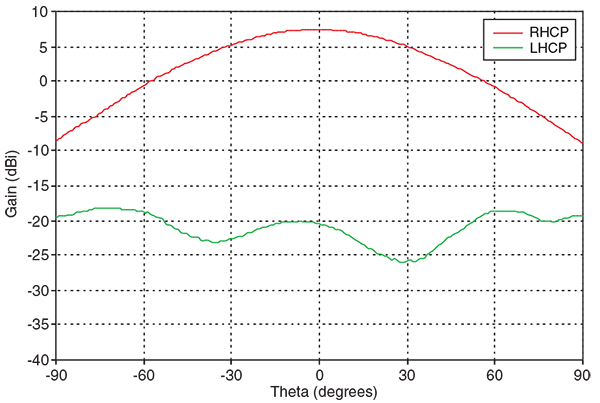
More color to the subjects of polarization, pattern, and consequential GNSS accuracy can be gained by focussing on the operation of the dielectric-loaded hexafilar antenna, as an example of a small antenna. Figure 4 shows the measured RHCP and LHCP elevation patterns of an exemplary small hexafilar antenna. These are excellent examples of the signature cardiod pattern shapes of good circular polarization antennas, but they point in opposite boresight directions. A dipole rotating anti-clockwise (viewed from above) in a plane would simultaneously excite a RHCP cardiod elevation pattern in the upwards direction and an oppositely directed, but otherwise similar, LHCP cardiod pattern downwards. If the antenna has no ground-plane and the dipole rotation is planar, the power of the upward RHCP and downward LHCP responses are equal. However, the dielectrically-loaded hexafilar antenna is a synthesis of a small travelling-wave upwardly spiralling dipole, emulating the axial-mode of a helical antenna. As the electrical size of such an antenna is increased, the area of the upwardly directed RHCP pattern progressively increases, and the area of the downwardly directed LHCP pattern progressively reduces. The antenna’s dielectric core enables this right-to-left discrimination within dimensions that are very much smaller than a free-space wavelength of the GNSS signal.

We can describe the polarization sorting behavior of the small dielectrically loaded antenna in figure 4 as follows. GNSS signals direct from the space vehicles will arrive in the directions of the upper hemisphere of the patterns where the highest sensitivity of the antenna to RHCP is deployed. GNSS signals bounced from a reflective object may also arrive in these upper hemisphere directions, but with reversed polarization: LHCP. In these directions the antenna has a very much lower sensitivity to LHCP, and the GNSS receiving process will accord a low value on these signals that as a result of the low antenna gain will be assessed as relatively noisy.
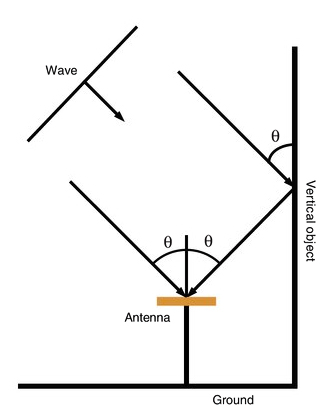
Signals that arrive at the antenna from directions in the lower hemisphere will certainly have reflected from the ground surface (assuming that the antenna is held upright). These reflected left-hand polarized signals may have been attenuated by absorption losses of materials present on ground surfaces and also reduced in GNSS receiver process weighting by the antenna’s discrimination in favor of RHCP.
RHCP and LHCP Gain
Whilst appraisal of antenna patterns is certainly the most important method for assessing the performance of antennas in different use scenarios, it is nevertheless difficult to report accurately because the three-dimensional data-set is inevitably complex. To provide a meaningful physical basis for discriminating performance between the test antennas for open-field and body-loaded, we propose a single parameter: cross-pole rejection at zenith as one which is directly relevant to GNSS accuracy in a multi-path environment. Figure 5 plots the right hand and left hand comparative frequency responses for open-field and body-loaded use scenarios. Table 1 summarizes these responses.
(a)

(b)

(c)

(d)


In open field, the chip antenna does not have a gain advantage for right-hand versus left-hand polarization and also suffers the highest impairment in gain when body-loading is applied. In this test there is an advantage in favor of RHCP gain for the body-loaded test scenario, but we presume this depends on the mounting position of this particular probe antenna on the test device. Perhaps a mounting position towards the left of the assembly might have incurred a disadvantage of similar magnitude?
The patch antenna has an excellent RHCP over LHCP advantage in open-field conditions, but this advantage diminishes when this solution is body-loaded. This is the least gain-impacted solution as presumably the horizontal ground-plane and much greater device width produce a relatively low body-loading impact.
The most interesting result concerns the hexafilar antenna, for which the RHCP to LHCP advantage actually improved in the body-loaded test scenario. As this device had the same depth, one might have expected it to sustain a body-loading impairment similar to that of the chip antenna, but due to the self-resonant character of the hexafilar element the loss in gain (in this zenith direction) was actually only slightly greater than that of the patch antenna.
The hexafilar element’s CP performance is distorted by the lack of circular symmetry of the vertical ground-plane; therefore in open field this direction has a relatively modest RHCP to LHCP gain advantage of about 5dB. However, when the device containing the hexafilar antenna solution is body-loaded, the re-radiation from reflections from the circuit-board are heavily damped by the phantom head. The radiating source is then predominantly the hexafilar self-resonant element that by design is not itself so significantly impacted by the body-loading scenario. This source is restored to a more autonomous circularly polarized form with an advantage of RHC versus LHCP gain in zenith direction, nearly 13.5dB.
Walk Tests
Free-space and body-loaded test data, together with arguments concerning polarization discrimination and multipath led to an hypothesis that the antennas with the best circular polarization performance should provide the highest GNSS positioning accuracy. We tested the three devices, worn against the lower torso where the body provides a relatively homogeneous dielectric medium, so that position data could be compared with a reference antenna mounted over a large overhead ground plane.
Many walk tests were conducted around different routes in London, which collectively demonstrate the value of circular-polarization discrimination as a key enabler for accurate street-level position determination. One segment (Figure 6) in the vicinity of an iconic tall London building commonly known as the Gherkin showed that, though the circularly polarized antennas closely followed the path of the reference antenna, the linearly polarized chip antenna produced an error of as much as 200 meters. It is possible that the dominant reflector in this case is the Gherkin itself.

Conclusions
The chip and hexafilar antennas could be integrated tightly into consumer device housings; both experienced gain uplift from the vertically disposed circuit-board ground-plane. The gain uplift from the chip antenna arose as the resonant volume of the device is enlarged as the device size is increased. The gain uplift from the hexafilar antenna arose as a result of constructive reflections from the circuit-board functioning as a vertical ground-plane.
The patch antenna was not the most convenient from the styling point of view because the depth was dictated by the size of the horizontally orientated patch. Consequently the housing was significantly thicker than for the chip and hexafilar solutions, and the patch antenna was not receiving significant uplift from reflections from the housing because the depth limitation constrained the ground-plane to ineffective dimensions.
In body-loaded tests, the chip and hexafilar antennas demonstrated roughly equal radiation efficiency, but the hexafilar provided a significant RHCP advantage. Higher right-hand circular gain was measured for the patch antenna; this was expected due to the greater depth of the housing to accommodate the patch antenna. Urban walk tests showed that the RHCP antennas provided the highest position accuracy.
Whilst the hexafilar antenna did experience some uplift due to reflections from the device circuit board, these were negated when the device was body-loaded. However, the distorting effects of the device ground-plane were also lost, so that the antenna’s advantage of RHCP over LHCP was improved in the body-loading condition.
The GNSS industry has advanced the miniaturization of polarization-controlled antennas for small body-loaded uses. This is gaining currency as enabling polarization diversity in 4G data-communication terminals.
Manufacturers
Sarantel SL1350 antenna was the hexafilar element under test.
Position data for all four devices was measured with Telit SE868 evaluation kits using CSR (now Samsung) SiRFstarIV chipset.
Oliver Leisten is chief technical officer and founder of Sarantel Limited, where Viktor Knobe worked as a student intern from Imperial College London.
 Tallysman Wireless, Inc., has announced the latest addition of the TW4320/4322 to its line of antenna products. The TW4320/TW4322 antennas are small wide-band, high-performance antennas housed in a compact IP67 magnetic mount enclosure, with a three-meter cable and a wide range of connectors.
Tallysman Wireless, Inc., has announced the latest addition of the TW4320/4322 to its line of antenna products. The TW4320/TW4322 antennas are small wide-band, high-performance antennas housed in a compact IP67 magnetic mount enclosure, with a three-meter cable and a wide range of connectors.



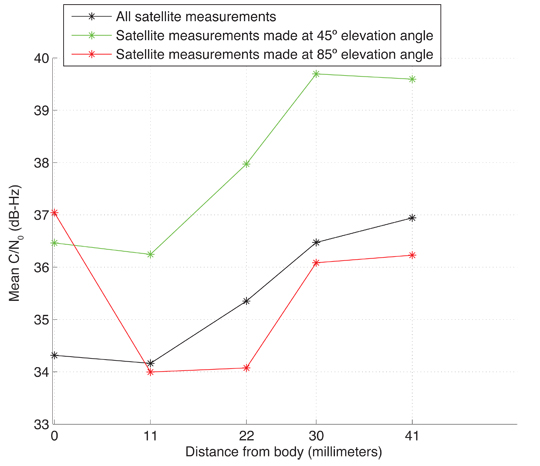
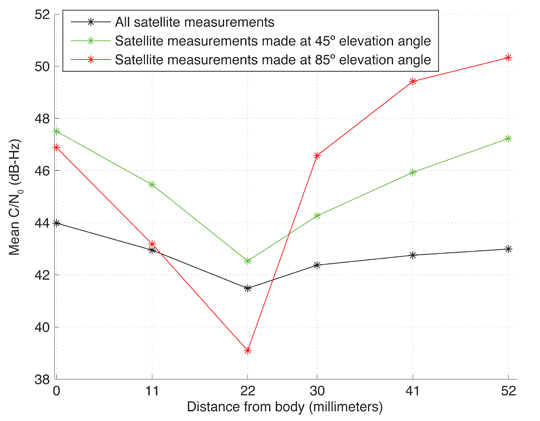
![FIGURE 6. Gain pattern of the patch antenna as measured by the measured C/N0 at all elevation angles as a function of antenna distance from body. Elevation angles [0º, 90º] have azimuths [180º, 360º], while elevation angles [90º, 180º] have azimuths [0º, 180º]. Jared B. Bancroft, Valérie Renaudin, Aiden Morrison, and Gérard Lachapelle](https://stage.globalpositioningnews.com/wp-content/uploads/2012/02/Inn-Fig6.jpg)
![FIGURE 9. Gain pattern of the quadrifilar antenna as measured by the C/N0 of all measurements as a function of antenna distance from body. Elevation angles [0º, 90º] have azimuths [180º, 360º], while elevation angles [90º, 180º] have azimuths [0º, 180º]. Jared B. Bancroft, Valérie Renaudin, Aiden Morrison, and Gérard Lachapelle](https://stage.globalpositioningnews.com/wp-content/uploads/2012/02/Inn-Fig9.jpg)