A 2019 RAND report for the U.S. Navy concluded that autonomy could still be in the distant future. The Navy should take care that a number of claimed autonomy applications could be more aspirational than practical, the report stated, with the applications nowhere near to operational capability. The authors wrote that huge investments may be required to achieve autonomous naval weapon systems, not only in autonomy.
Around the world in recent years, most armed forces and many advanced technology companies, along with government agencies, have been investing in AI and automation. Perhaps now, just six years later in 2025, we already are looking foward to unmanned vehicles that display not just fundamental autonomy, but also quite advanced “auto-capability.”
In the world’s water
The U.S. Navy (USN) has been operating a number of unmanned surface vessels (USV) over the past several years. In a 2023/2024 Pacific Fleet exercise, four USV models (Sea Hunter, Sea Hawk, Mariner and Ranger) were mostly operated autonomously. Ranger has a small bridge manned only for harbor maneuvers.
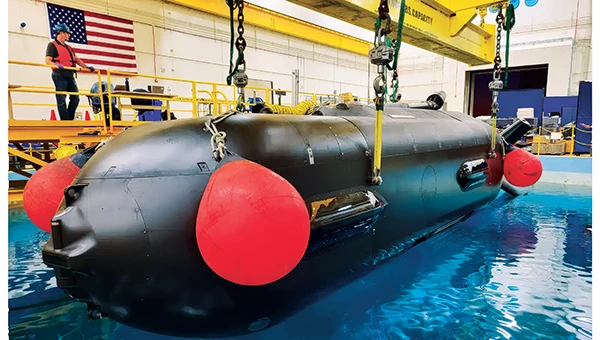
An Orca extra large UUV (XLUUV) is tested in a tank. With a range of 6,500 nautical miles, the submarine can perform long missions. Its navigation system features a Kalman-filtered inertial unit supported by Doppler velocity logs and depth sensors. Photo: Boeing
The USN has unmanned autonomy programs for large, small and underwater vehicles. The Orca submarine program is slated to consist of five 51-foot-long vehicles, and includes variants fitted with an added 30-foot payload section. To operate for several months underwater, it is likely that a similar degree of autonomy has been incorporated. ORCA surfaces regularly and can be given new routing if required.
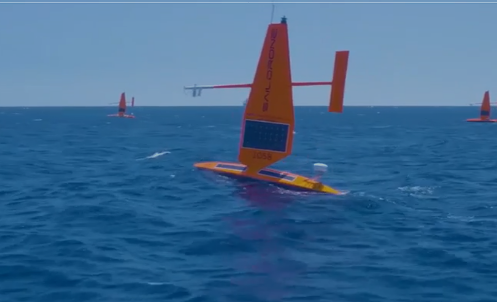
Saildrone’s autonomous research vessel (Photo: Saildrone)
Other types of vessels collect ocean and seafloor data. The environmentally friendly Saildrone can operate independently — we could say autonomously — for more than a year. The Saildrone company, based in Alameda, California, contracts out its USVs, providing its technology to agencies and governments and taking on the risks of ocean surveying to acquire valuable data. Saidrones are equipped with satellite communications, GNSS navigation, weather sensors and sub-surface sensors.
Wheels on the road
Autonomy applications on land are dominated by commercial self-driving cars, Tesla being the leading manufacturer in the U.S. However, full autonomy is still a considerable way from being ready. At the full-autonomy level, known as Level 6 in the auto industry, the vehicle does all the driving, including obstacle avoidance, under all conditions, without any geographic limitation. Nevertheless, we appear to have progressed from basic manual control (Level 0) to somewhere around Level 3, where the vehicle is largely aware of its environment, and does most of the driving. Even so, human monitoring and control are still required.
Tesla’s autopilot technology in its Model S and Model X electric vehicles could be referred to as an advanced driver assistance system — or as Tesla calls it, “Full Self-Driving (Supervised)” — and is reported to handle emergency steering and braking, autonomous steering, lane changing, vehicle following, curve negotiation, and automatic parking. Autopilot sensor inputs are provided by 12 ultrasonic sensors and eight cameras providing a 360° field of view.
Tesla Autopilot intelligence can identify more than 250 traffic signs 50 countries, including turn signs and speed limits. It can identify and interpret traffic lights and road markings, and decide what to do when coming across things such as traffic cones and pedestrians.
Nevertheless, Tesla’s have been involved in quite a few accidents, the cause of which has been analyzed to be mostly a lack of driver attention (supervision), and in a number of cases, a failure of the autonomous system to recognize unusual road conditions.
Another company, Leo Drive, specializes in providing scalable software and hardware solutions, offering an end-to-end, one-stop service for integration of autonomous systems. Its mission is to make autonomous technology more accessible and widely adopted across various industries.
For its autonomous test vehicle, Leo Drive is using the Ellipse-D, a dual-antenna RTK inertial navigation system (INS) from SBG Systems. The company chose the Ellipse-D for its accuracy, reliability, and advanced features — all essential for autonomous vehicle development and testing. The Ellipse-D INS was integrated into Leo Drive’s, a passenger car converted for autonomous operations.
Oshkosh Defense integrated autonomous technology onto Palletized Load System vehicles as part of the Expedient Leader Follower program. Photo: Oshkosh Defense
The U.S. Army has been using automation in its weapon systems for some time. How much autonomous behavior, of which these systems are truly capable, may be difficult to determine. The General Atomics Reaper unmanned aerial vehicle (UAV) is largely controlled over long-distance satellite links by operators in control stations. It’s possible that the same set up is true of most of the Army’s automated weapons — probably motivated by the need to avoid systems independently determining their own targets and firing without human confirmation.
It’s difficult to determine just what army programs are underway, other than to acknowledge that programs have been launched in the past. There doesn’t appear to be any open, clear indication of the degree of autonomy to be included. A couple of programs have produced at least visible hardware, but how much or little human control is involved is unclear.
Taking flight
Up in the air, new autonomy contender Mayman Aerospace is offering the Razor, a jet-powered vertical take-off and landing (VTOL) UAV. Development of Razor is funded by private investment and U.S. Department of Defense contracts.
The RAZOR VTOL with gimbled jet pods passed tests at a military base in California in September 2024. Photo: Mayman Aerospace
Razor is imbued with a degree of AI that enables autonomous decision-making, as well as navigation. Its autonomous AI brain — the SkyField flight-control system — navigates independently in a GPS-denied environment, possibly involving ground beacons and eventually integrating with battlefield management systems. With a 5- to 6-foot-long airframe and sculpted shape, the aircraft presents a low radar cross section and has a degree of stealth to assist in the penetration of enemy defenses. Its top speed of 500 mph provides new options for both military and commercial applications, according to Mayman.
Razor also can aid disaster recovery, rescue operations, and the delivery of urgently needed life-saving cargo.
Many VTOL unmanned aircraft have struggled with the transition from vertical to horizontal flight. On its first vertical lift-off and climb-out on four jet engines, Razor paused briefly at altitude. Then its jet pods tilted slightly toward horizontal before the aircraft went directly into horizontal flight. An earlier flying testbed may have assisted the development of transition software, perhaps with a boost from machine learning.
Designed for deliveries, the EHang 216 heavy cargo, 16-rotor unmanned aircraft can carry a payload of 551 pounds over almost 22 miles with a top speed of 80 mph, according to the EHang company. The UAV is fully autonomously operated while being monitored over a 4G/5G data link at a manned control center. The system has an automatic fail-safe mode in which the UAV will return to base if the communications link goes down or if battery power drops too low.
EHang also uses a redundant design, with two GPS receivers and double rotors, ensuring a low likelihood of failure during a delivery run.
More In development
So while land vehicle autonomy is moving forward — with Tesla cars and Army vehicles that apparently can take control with close human monitoring — we still have some distance to go to achieve fully independent autonomous behavior on the road.
The Ehang 216 heavy-cargo UAV EHang 216L is designed for deliveries, including life-saving ones. Photo: Ehang video screenshot
Autonomous applications on the sea are more common, with U.S. Navy applications showing substantial progress. Still, precise navigation in crowded harbors remains under human control. Humans are still watching and monitoring, ready to intervene should military or commercial UAV applications make untoward execution errors.
We will continue to follow developments of significant autonomy programs such as the U.S. Air Force Collaborative Combat Aircraft (CCA), a new type of uncrewed weapon system. The CCA and other programs are maintaining high investment levels, so it’s possible that we may see full autonomy fielded quite soon. Perhaps then our belief in its capability will become fully justified.
Guidance and precision control, the base elements of modern machine control for construction, have continued to evolve since broad productization began in the mid-1990s. However, the value proposition has become even sweeter since, with value being realized beyond the return on investment (ROI) of the general contractors and the total project price tag for the clients. While the majority of equipment globally is still non-digital, new levels of simplicity and affordability are helping to fill that gap.
The roots of machine control stretch back a century. The Historical Construction Equipment Association (HCEA) posits that the A.W. French & Co. “utility grader” of the 1920s, a crawler-mounted unit that used stringline control, may be the very first example — and this before electronics and computing. However, it was the advent of real-time kinematics (RTK) for GPS in the mid-1990s that brought machine control as we know it to the construction site, and coincidentally to precision agriculture.
Initially, the focus was on guidance. Then it moved to precision control, such as blade control, and later propagated to more classes of motorized equipment, improved with further sensor integration.
The impact on construction and agriculture has been undeniable: productivity gains, less rework, more efficient handling of materials, shorter timelines, site safety improvements, and more. These benefits are as obvious to clients and operators as they were in the early days of adoption, gains from nearly three decades of innovation.
What form have these growing benefits taken, and who is realizing them? We sought insights from industry experts to find out.
Grading and Excavation
Automation is not just about speed; it is also about better control of the load and stress on the equipment and moving just the right amount of materials so as not to place a burden on it. (Photo: CHCNAV)
These two activities, as each of our interviewed experts attest, represent the lion’s share of realized productivity gains.
While not the complete picture of overall value, the sheer volume of equipment that has been, or could be, automated speaks, well, volumes. “Apart from the skid steer systems, there are more excavators manufactured than all the other equipment types combined,” said Daniel Sass, product manager of machine control at Hemisphere GNSS. “Excavators are the workhorse. And people use them differently, and they use other pieces of equipment to complement excavators somewhat differently. Certainly, the bulk of our sales is excavators, and in fact a key part of our value proposition is focused on compact machines, but also all the way up to mining shovels. Certainly, by volume it is excavators and compact excavators.”
Numbers help tell the story. “In the United States, at least in a three-year period from 2019 to 2022, about 253,000 excavators were sold, for which I have pretty reliable data, but only 61,000 dozers and only 7,000 scrapers,” Sass said. “That’s North America, where we also use a lot of dozers and scrapers. If you go to Europe, where they use excavators for many other tasks, the proportional impact might be higher.”
Operators can easily gauge the ROI of going digital for individual pieces of equipment such as excavators, but part of the incentive could be that general contractors are requiring subcontractors to be equipped and ready to fit into a more complete digital site. “Some definitely require it,” said Randy Noland, vice president of global sales at Hemisphere GNSS. “A lot of … larger sites. I wouldn’t say everybody mandates it yet, but that it is growing.”
“Operator assistance is not only helping someone cut to grade faster, but is also the best way to cut to grade,” said Cameron Clark, earthmoving industry director, Trimble Civil Construction. “How do you move the material? That directly ties into productivity by only moving the material you need to move, which also equates to less fuel because you can do it faster.” With operator assistance, Clark said, it is not uncommon to see productivity gains of 30% to 40%, even with inexperienced operators. And with automatics, this could exceed 75%, depending on the work done.
There are substantial gains to be made in operator assistance for less complex heavy equipment, such as compactors. “Often a contactor will put a less experienced operator in the compactor,” Clark said. “In manual days, to overcome the potential of under-compaction and missing spots, they’d create quite a big overlap, maybe up to 40% of overlap between paths. By adding steering control, we can automate the compactor to where it needs to be — to stay on line every day, all day. And you can reduce the overlap to 10% or 15%; having to compact a smaller area means that you’re quicker, say 30% quicker.”
“Grade control gains can be 30% to 50%,” said Magnus Thibblin, president, machine control division, Hexagon Geosystems. “Depending on the machine and the job application, and how experienced the crew is, it can be similar for excavators.” Thibblin was an end user from the early days of machine control. He saw its potential and how it might work better. Its benefits came not just from automating elements of the equipment, he said, but from implementing a more complete digital workflow.
“How much are you working with the digital design from the start?” Thibblin said. “I’m one of those who believes you should have 3D from the start; for any kind of layer that the machines can build to. Incidentally, in North America, working to models is implemented for a lot of graders and dozers. In Europe, there is a large excavating market, but it’s the same foundation. If you work from the design, you will have savings in fuel, time, efficiency, safety, etc. Depending on all of these things, the total value proposition may be 30% to 70%.”
Wenming Sun, vice general manager for digital construction, CHCNAV, reiterates these points. “Currently, our machine control solutions are mainly installed on earthmoving machines, including bulldozers, excavators and motor graders,” Sun said. “The greatest value of these solutions is to improve construction efficiency, shorten construction time, reduce fuel consumption and mechanical wear while ensuring construction quality.”
CHCNAV is a relatively new player in the construction machine control market, launching initially in Europe and Asia. The company has been developing automation and steering systems for equipment that can yield the highest gains for their customers. “For example, our 3D TG63 automatic control system for motor graders can double efficiency compared to manual operation of machines and reduce time by 50% for the same workload,” Sun said.
Getting to the designed grade, or trench line, of earthworks geometry faster is a huge benefit, while reducing or removing finishing steps is a bonus. “Now we’re seeing that with excavators that have automatics, the finishing we can get out of an excavator is amazing,” Clark said. “You used to get dozers cleaning up after excavators. Now, with the performance you can get with an automatic excavator, you often don’t need to run the dozer — the excavator can get it done the first time.”
However, dozers are used for many other tasks. Clark noted that about 95% of blade-control systems for dozers sold have automatics. He said grade control brings tremendous productivity gains, but that excavation is right up there as well. “When you look at the number of machines out there, it’s in a different league,” Clark added. “In 2021, for example, globally about 370,000 crawler excavators and 325,000 mini excavators were sold.”
Lateral Benefits
GNSS has revolutionized automation for many classes of heavy equipment. However, for certain high precision work, particularly finished elevations, site levels and totals stations are essential. (Photo: Hexagon)
For the general contractor, ROI is a key measure. This can be reasonably easy to gauge, as this ROI calculator shows: intelligent-construction.com/roi-calculator/. However, what matters is not just the upfront time and cost for grading and excavating, but also avoiding lateral time and costs. “If you can do jobs faster and more accurately, it lends itself to less rework,” Clark said. “You do it right the first time, which again goes into less fuel, and then also less material. For example, let’s say your excavator is digging down to a trench and the operator digs too deep, which happens often. That material dug out of the trench potentially needs to be carted away. So, extra fuel and trucks are needed to take the material away. They’ve got to put high quality material back in, so that means they actually have to cart more material back to put in the trench, and you have to spread the material.
Again, it’s a flow-on effect — a chain reaction. When you look at sustainability, what we do has direct and indirect effects — it’s 1 gallon of fuel you don’t use that saves about 22 pounds of carbon emissions.”
The green dividend goes beyond just what individuals and firms wish to see. Increasingly, infrastructure developers and owners may be subject to sustainability requirements. Depending on where the work is being done, sustainable development goals are being acted on. This includes not just the environmental goals, but also requirements for the digitalization of design and construction, and ultimately smarter and more sustainable infrastructure. Machine control in construction can deliver some of the most substantial benefits in meeting these goals.
Like overall value for the operators and clients, gauging the highest green dividend becomes a proposition of sheer volume. “On average, your dozer is going to burn much more fuel. However, we sell four times as many excavator solutions as we do for dozers,” said Miles Ware, vice president of marketing and global customer care, Hemisphere GNSS. “The excavator solution is critical for both an ROI and an environmental impact.” Among the most-sold excavators in the United States are the Kubota 4-ton, the John Deere 3.5-ton and 5-ton, and the Caterpillar 5-ton. “The smaller excavators are going to use a lot less fuel,” Ware added. “If we compare this to mid- and large-sized excavators and dozers, we might be getting close to a point of equilibrium, when it comes to environmental impact. Those that consume huge amounts of fuel move massive amounts of earth. However, the ability to have the larger units operate much more efficiently, complete jobs much faster, and get on site and off site quicker with fewer passes in fewer hours adds up to a green dividend. Then you take the smaller volumetric scale of so many excavators and the environmental benefit really starts to balance out. There are huge incentives for all these platforms, whether it be dozers or excavators, to have the technology in place.” Hemisphere announced at the Bauma Exhibition in October that it now has systems to support loaders and scrapers.
“One of the things that’s really intriguing to me about the loader solution is that it represents a crossover point between construction earthmoving and agriculture,” Ware said. “There’s a huge benefit for feedlots and agriculture-related operations, where they use machine-controlled loaders to avoid damaging base layers. We have a growing machine-control audience, and a substantially growing precision agriculture audience. It is just one example of how technologies are cross-pollinating in different verticals.”
The benefits of machine control are broadly recognized across the industry. “Improved construction efficiency and shorter construction time means that the machine operating time is shortened for the same workload,” Sun said. “According to our own calculation results, using for instance our system for motor graders, fuel consumption can be reduced by 35% to 50% under different working conditions. Thanks to the full real-time automation of its blade, the grader can achieve the expected finish accuracy in one or two passes, whereas an unequipped machine would require four to five passes. This effectively reduces fuel consumption and, as a result, minimizes the carbon footprint of construction projects.”
Automation means you can build to the model in less time and refine the movements of the equipment to move just the right amount of material — enough to improve productivity, but not so much as to put an undue strain on it. “Any time you have a piece of equipment that needs to be repaired or is out of service, it is disruptive to the project of course, but it can also have an environmental impact, and sustainability is something we all work toward,” Thibblin said.
Connectivity and Collaboration
Going to a fully digital site means working fully in 3D, from a digital model, and seeking to eliminate 2D plans sets. No more interpretation, no more estimation—the right amount of material is moved rapidly and reliably by multiple machines working in harmony. (Photo: Hemisphere GNSS)
Moving forward, there may be additional incremental gains in the productivity of individually automated equipment, yet this may be modest in contrast to the time since the introduction of machine control decades ago. For the next sea change in construction productivity, we should be looking beyond simply the machines. “Let’s take the holistic viewpoint,” Thibblin said. “You have everything from the machines that of course have either machine control or different levels of autonomy, everything from semi-autonomous to semi-automatic. Then you have the trucks, which can be connected also with the tracker devices, which enables optimal routing, enhanced safety, and coordinating material handling cycles.”
Total project and site coordination has been in the works for vertical construction for quite some time; we hear a lot about building information modeling. However, heavy civil is catching up. “We anticipate that the ongoing integration of digital construction solutions with internet of things technologies will bring more choice and functionality to customers,” Sun said.
Further, real-time collaborative software platforms are already in use. Many vendors for machine control have added live connectivity for such coordination.
“Our customers are using ConX,” Thibblin said, referring to Leica ConX, a cloud-based collaboration tool. “It is remotely connecting to the mission, which is support, service, file transfers, project updates.” While online collaborative tools have been around for years, current offerings have reached such a level of maturity that they have driven a boom in adoption for even smaller operations. Customers need to make sure that projects are working optimally, and continuously.
Another major difference from the early days of machine control is that the relative cost of outfitting equipment with automation components is far less. Therefore, it is more practical to automate nearly all equipment on a site, making a truly coordinated digital site possible. “It’s not just the larger businesses that are investing, it’s also the smaller businesses that understand and can calculate the ROI. It is also a difference in competency level: how complex and support-intensive the system was. Now, it’s much more integrated,” Thibblin said.
Today’s systems are tighter, work better, connect better with original equipment manufacturers (OEMs), and the learning curve not as steep. The machines have become smarter, yet easier to use and integrate. “You do not have to be a nuclear scientist to understand the systems,” Thibblin said. “The equipment and collaboration tools are now much simpler. Not simple to make, but we do that for you.”
It is a chain reaction: the equipment gets smarter yet simpler, and both characteristics drive more adoption. More of a site gets automated, enabling digital collaboration, and with that comes more efficiency, saving on time, costs, materials and fuel. The sum of the parts yields productivity gains, the site gets safer, and of course there is a green dividend as well. “It is not just the one thing that gets to this,” Thibblin said. “It is many parts.”
Clark reiterates, “The biggest driver and the biggest impact is when we can actually control the site, optimize how we coordinate groups of machines working together, and efficiently run the job site. That’s where you’re going to see the biggest benefit for sustainability and reducing the carbon footprint. You don’t just optimize productivity at the machine — it’s the coordination of the site and how the machines work together.”
What about the smaller firms and short-duration projects? Should the same level of full site integration happen for each job? Perhaps not. However, there are alternative ways to realize nearly all the benefits of automation without a full digital site. “There’s a lot of focus on short-duration jobs, not only for the typical small contractors, but also for large contractors,” Clark said. “Some large contractors actually target a decent portion of jobs for smaller duration, to balance out changes in market dynamics.” There is a lot of demand for small contractors with technology, and many small contractors have to automate just to stay in the game.
“People using grade control see all the benefits, and that affects their costs,” Clark said. “They can get jobs at a different price than someone who isn’t benefiting from grade control. We’re seeing this a lot in the adoption of our earthworks and grade-control products.”
A challenge to adoption by smaller firms used to be that with a small staff, they might not have the necessary office software, a surveyor, a design engineer, or a 3D modeler. While there is a cottage industry of drafters who do small 3D modeling contracts for that market, there are now more alternatives. “We’ve added features to our systems that enable these contractors, on these short duration jobs, to create designs without requiring office software,” Clark said. “Typically, without a 3D design, you are eyeballing, and you have to do grade checks. There are conventional systems that can include lasers and line tracers, but now that simple designs can be added to the machine-control systems without additional office steps, more operators will be able to use them on a greater number of small jobs.”
Multi-sensor integration has enabled more equipment on the site to be automated. Not long after the first GPS-guided machine control systems came along, more sensors were added, such as inertial measurement units (IMUs). Besides IMUs, the sensors in play can include GNSS receivers, lasers, lidar scanners, sonics, optics, cameras, displacement sensors, pressure sensors, thermal sensors, inclinometers, vehicle distance measurement instruments and telematics.
Beyond GPS, the wealth of additional GNSS satellites and signals has brought more robust and reliable solutions in mixed environments. Recently, a heavy equipment operator called to ask if there was “something wrong with GPS” that day. He reported having spotty fixes and wildly varying results. After some standard troubleshooting of his communications and correction sources, we determined he was using a legacy broadcast format, and his GNSS receiver, while fully multi-constellation enabled, was only using one constellation. Once a newer correction format was chosen — bam! — he was fixed instantly with results as good as he’d ever seen. Things are getting better on all tech fronts.
Coordination of a fully digital site often involves integrating as many operations as possible through a back-end site management software, connecting as much equipment as possible, and working from standard models. This can be a relatively simple proposition if a site is under a single solution. However, general contractors may not be in a position to use equipment from a single brand. They may have a diverse equipment portfolio and seek flexibility in being able to onboard subcontractors. Vendors have recognized this and offer different levels of interoperability. “In addition to high-performance and real-world site-smart software features, our systems play well with mixed fleets,” Noland said. “Meaning multi-brand GNSS systems, radios and various file formats. This is key for firms that have already made investments, as well as new users entering the market concerned about how compatible their equipment will be.”
“If you have a mixed fleet, you can easily grow it,” Ware said. “Or, you can interoperate with other contractors or entities. So, if there’s a brand X already working, and if a Hemisphere GradeMetrix contractor is added to that project, they can seamlessly come in and handle most of the files, go immediately to work, and further expand the use of the technology on that particular project.”
The Underserved Market
Machine control has evolved in the decades since initial productization from navigation and guiance to include precision control of blades, buckets and more, and the ability of even smaller equipment to work from 3D models. (Photo: Trimble)
If the construction industry is going to help meet growing global infrastructure needs, to fill the existing multi-trillion-dollar infrastructure gaps, then a lot more equipment needs to be automated.
“Let me just make a general comment that speaks to both productivity gains and a lower carbon footprint: as an industry, we can do much better,” Noland said. “Only about 15% to 20% of the equipment that could be outfitted for machine control has been, and the other 80% is up for grabs.” Noland credited other key players — such as Trimble, Topcon, and Leica — with providing excellent solutions for certain sectors of machine control, yet he sees an opportunity for Hemisphere to excel.
“The next wave is the underserved part of the market,” Noland said. “If we’re successful, then your climate impact is greater and your productivity gains higher.” He noted that in addition to systems for large equipment, a particular focus for Hemisphere has been providing a range of affordable solutions for smaller equipment. “We feel like we are tapping into that part of the market that has been underserved. It’s not necessarily new features from what everybody already has, as much as it is democratizing the technology to that underserved 80%.”
Autonomy and the Near Future
It is exciting to think about, but is the next sea change for construction machine control going to be full automation? Is that truly an inevitability? Or is the road to autonomy already paved with productivity gold?
“The autonomous machine, and the autonomous site; it is what we are doing to get there that continually boosts productivity,” Clark said. “As more operator assistance is added, the semi-autonomy that many systems already provide means that the operator can concentrate on more aspects of the operation; and this definitely enhances site safety.”
Autonomy might not necessarily reach every piece of equipment, and contractors may not want it for every task. With the prospects of anything like a fully autonomous site being on a sliding horizon, contractors and clients are not waiting around — they are already reaping the benefits of automation on the individual equipment level. Productivity gains and a green dividend will only increase as sites become more fully integrated. In some ways, the best parts of such a future are already here.
Gavin Schrock is a practicing surveyor, technology writer and operator of a cooperative GNSS network.
When I saw that there was a plan for a whole bunch of unmanned, semi-autonomous racecars to compete at the Indianapolis Motor Speedway (Indy, or IMS) racetrack, I initially thought we might be headed to one significant mess of broken-up machines and potentially a lot of damage. I tracked the various announcements of the competition as things progressed, especially when a prize of $1 million dollars was put up by the Lilly Endowment in Indianapolis, and the majority of the field appeared to be potentially staffed by undergrad university teams.
Photo: Indy Autonomous Challenge
However, this isn’t the first time we’ve had unmanned, autonomous road vehicles in competition — we’ve seen highly instrumented SUVs in desert settings in Nevada and California, initially with pretty poor results, which began to improve significantly for the second time round, then vehicles in some simulated street settings with some mixed and also some pretty good results.
So, as the competition date grew closer for the Indy Autonomous Challenge (IAC), the number of published progress reports began to increase, and we began to better understand how the initial 40 teams might take on this seemingly impossible task — how on Earth will they replicate a regular Indy (also a class of racecar) race? Surely many unmanned racecars on the same track at the same time doing more than 150 mph would be catastrophic!
When you take a look, however, at the advances we’ve seen, which have enabled unmanned cars, trucks, taxis and such – surely this tech could stretch to meet these major objectives? But Dallara AV-21 Indy Light racecars avoiding hurtling walls passing by, cornering, getting in and out of the pits, coping with vehicles behind, ahead and overtaking — even a superior-equipped unmanned racecar at >150 mph — well that’s something we would really need to see.
Then you have to take a look at the outfits involved, providing support to the IAC teams – companies including Cisco, and motor sport units such as ADLINK, Ansys, Aptiv, Bridgestone, Luminar, Microsoft and Valvoline and the non-profit Energy Systems Network. The University teams from around the world themselves appeared to also have significant heritage and skill-levels.
As the 40 University teams started the long trek to get over the hurdles that this challenge presented, members from 21 of those institutions were actually able to make it to Indy, grouped into nine “national” teams. By October 23 the nine teams, with only one car each, were ready to test their autonomous vehicles on the actual track.
Clemson University established the baseline Dallara AV-21 vehicle and technology to be used by each team for the race, with sensors monitoring chassis motion, suspension, tires and powertrain. Each team would install its own guidance and avoidance system, with each vehicle equipped with six cameras, four lidars, RTK GNSS, associated radios and bags of computing running each team’s customized control system software. The object being for cars to exit pit-lane, accelerate, brake, establish an optimum line for each corner and flat, avoid obstacles, evaluate the track conditions and establish tolerable limits.
The teams were required to complete several stages of selection, from submission of initial proposals through demonstration of existing vehicle automation capability, simulated race performance, qualification testing at the Indy track — all leading to an anticipated head-to head race against the other qualifiers.
Then 20 days of planned testing stretched to 50, and three months of preparation passed with students working intensely throughout, curing the glitches, experimenting with how to increase lap speed, and pushing the limits while still keeping the cars intact.
Energy Systems Network managed the rules of the final competition in a way that reflected Indy qualification days prior the main race — they judged that the technology was not yet at a stage where multiple cars on the track at the same time would have been such a good idea. So, each car was to individually run a number of practice/qualification laps and the quickest car would be the winner.
During the first stage of live competition, cars were required to exit the pits and run a warmup lap, followed by two laps that were timed and a slow-down lap that required navigating around inflatable barriers on the front-stretch, and then return successfully back around the track into their pit-stop locations. There were several spins in the corners and several crashes, but the four surviving cars/teams were able to optimistically post speeds of more than 130 mph.
Photo: Indy Autonomous Challenge
The final phase involved the four teams taking their cars around a number of warm-up/practice laps, followed by four timed laps. Only the car from Germany’s Technical University of Munich was able to complete all laps with an average speed of ~136 mph, so that team ultimately won the $1 million prize. Even so, all teams were able to successfully mature their systems’ performance through the many months leading up to the IAC and their progress through the various qualification stages. Even the other three final qualifiers had much to celebrate as a result of the competition.
The sponsors supporting the various teams as they progressed through the Challenge may have spent more than $120 million, so that high-pressure development work will be invested back into many vehicle automation opportunities. After all, that was the main objective for the whole undertaking. We should hopefully begin to see safer, more capable self-driving vehicles emerge in the months to come as the technology is applied to more production vehicle automation.
The surveying profession has experienced a plethora of advancing technology over the past two decades and it does not look like there will be a slowdown any time soon. From robotic total stations to laser scanning to the use of multiple GNSS constellations, the profession is constantly adapting these emerging technologies into a useful tool for daily applications. For most practicing surveyors, it is a challenge to keep up with not just the hardware of these advancements, but also with software, which is being developed in parallel. Have you tried to open and draw a simple figure in any of the industry standard CAD programs lately?
The complexity of these programs, while advancing the capability of many technical professions, forces even the casual user to maintain a regular habit of software education and training. While it may seem primitive to say that a practitioner is a “practicing” surveyor, on-the-job training never stops. Just when the profession thinks there are no more significant advancements, something comes out of left field that truly blindsides us. (See the adoption of UAVS by the surveying profession compared to the public sector…) What do I think will be one of the next “big things” to revolutionize surveying? The technology is already here, and we need to seriously get on board with adoption before we miss another opportunity to highlight the expertise of the profession.
VIRTUAL REALITY and AUGMENTED REALITY (VR & AR)
First, we need to know that virtual reality (VR) and augmented reality (AR) are different, even though many people use these terms interchangeably. The differences are as follows:
Virtual Reality (VR)
VR is a virtual world generated by computers and programming.
VR is a closed environment that is fully immersive.
VR requires a device (specialized glasses and/or a headset).
Users in the VR experience are limited by the programming and their computer’s abilities.
The VR experience may be based upon real-world conditions but is a fictional setting.
Users of VR can travel and experience conditions in real and fictitious places.
VR can allow users to have experiences that are not physically possible in the real world.
VR is 75% virtual + 25% real (industry “rule of thumb”)
Augmented Reality (AR)
AR is typically based on actual physical places.
AR is an open environment that is partly immersive.
In AR, the user controls the environment.
AR combines virtual elements and experiences with real world conditions.
Experiences in AR can be accessed by computer, tablet, and smartphones.
AR is useful for product visualization and evaluation.
AR is 75% real + 25% virtual (industry “rule of thumb”)
It is important to know these difference between the two technologies in order to implement the correct one for the task at hand. However, both will play an important in surveying for generations to come.
One of the surveyor’s biggest responsibilities is to complete an accurate site conditions model by topographic methods. Once the topographic survey is completed, site designers will utilize this information to create a unique project that works with the existing site conditions. Advances in CAD software and technology allow engineers and architects to design in 3D and blend the new site with the existing conditions, drainage, and utilities. These designs can be further refined into virtual reality models to give the project’s stakeholders a better indication of what the final product will be when construction is completed.
The key takeaway here is that the surveyor is responsible for delivering the existing conditions model. A model that accurately represents the subject site but in digital form enables the design of the project to be more efficient and realistic to meet the client’s expectation. Surveyers, however, will not use virtual reality as much as augmented reality, for many good reasons.
USES OF AUGMENTED REALITY TECHNOLOGY FOR SURVEYING
AR is still in its infancy. Because surveyors have an interest in the existing and proposed conditions of sites, the use of AR becomes an important tool for the future. Merging proposed information with existing site conditions can become the norm, but like many emerging technologies, the profession will need to learn how to embrace it.
To get a better idea of how the technology works and why surveyors need to consider using it, let us look at an application that showcases AR: Pokémon Go. Yes, the smartphone game app that took the world by storm in 2016 and captivated many “trainers” to search the streets for Ultra Balls and characters. (There are still more than 100 million active players worldwide.) Players of all ages have continued to search for elusive items and characters in a high-tech scavenger hunt that is constantly changing, and all based upon the real world around us. By merging a real-time view with game entities at random geographic locations, players move about our world using one of the best examples of AR.
How does this apply to the surveying profession? Surveyors could utilize AR in everyday tasks but that would require having a fully developed 3D design model that could merge with the existing conditions in their visual device. There are a variety of devices for utilizing AR, including smartphones and tablets. Many of the new data collectors running Windows and Android operating systems can also be used for incorporating AR into the field operation. Here are some examples of AR how can be utilized for surveying tasks:
While construction staking, AR can be used to assist with structure and improvement location. A quick visual check can help confirm staking calculations are consistent with engineering design.
Use AR to visually check installed improvements, including curbs, utility structures, and paving. Any deviation from the proposed design should be quite evident.
When establishing property corners, AR will help the field crew quickly determine whether the calculated location is accessible. This can be used for staking out pre-calculated boundary points and/or proposed lot corners in a new subdivision.
Here are a few ideas as to how surveyors could utilize AR in everyday tasks in the future:
As public utilities are becoming more available within GIS shape files with geographic locations, they could be utilized with AR to help visually establish locations in the field. Mainline utilities and service lines would become easier to physically verify using AR.
Another GIS shapefile entity, the parcel line layer, could be used to help the surveyor understand where the property owner believes the line(s) to be as opposed to the actual monumented location.
All reference monuments and benchmarks established by public agencies using geographic location information could enhance the “treasure hunt” of confirming local datum points.
SURVEYING USING AR TO PROTECT THE PUBLIC
Geospatial information has revolutionized our world, so using AR to help when trouble strikes can potentially be a lifesaver. Recently, an oceanfront condominium in Florida collapsed due to structural failure. While the age of the structure precluded it from having any digital geographic location data, any new similar development could be measured and recorded to assist with future emergency needs. Almost all new development has digital surveying, engineering, and architecture and must use local horizontal and vertical datums. Using the proposed information and verifying with post-construction record drawings, the digital record can be created.
It doesn’t take a design flaw to create a public hazard. For instance, a gas leak could render any building, such as the Florida condo, susceptible to catastrophic damage. By having a digital model of the underground structure, emergency crews could use AR to help locate potential open spaces in the building. As is the case with installing fire suppression systems and emergency exits, the cost to create a digital model of a completed building will be well worth it to save lives.
Underground utility corridors within cities, campuses, or manufacturing facilities could also utilize geospatial locations to establish a digital map for future use with AR. It will take time and significant cost to map existing facilities, yet it should be required for new sites to provide this information for emergencies and for use when designing expansions within the site. Having this utility information to use with AR during the design phase could lead to identifying potential problems before construction starts.
Haiti after an earthquake. (Photo: 1001nights/E+/Getty Images)
Another reason to plan for future safety is how much uncertainty we face in today’s society. At press time, we are coming up on the 20th anniversary of 9/11. We also just watched Haiti suffer another devastating earthquake. The 2021 hurricane season has also been very active, so that danger looms large, too. Disasters happen all the time with little to no warning. Our world is much more advanced than we were at the turn of the century, so we can use these advancements to map our infrastructure. Let us hope we never need to use the digital information for another disaster akin of 9/11. Instead, let us use it to ensure that we can get to someone in a remote spot if necessary.
THE ROAD TO FUTURE MAPPING AND AUTOMATION
As previously discussed, establishing a digital twin of our world could help provide a better map for establishing parcel ownership, reducing construction conflicts, and offering better planning tools for future expansion. Will it be completed within my lifetime? No, and I doubt it will be done within the next couple of generations after me.
We can, however, get a significant start on capturing the necessary information to begin the process of digitization. Technology has exceeded my expectations just within the past decade, so I can only hope that more advancements will help with building this digital beast. More architects and engineers are utilizing BIM (building information modeling) for 3D design and collaboration. Most municipalities and counties have built some form of GIS that uses one of the standard geographic datums. Surveyors have fully embraced GNSS technology so state plane and national geographic coordinate systems have become the norm. In addition, we are seeing a wide number of consultants use autonomous vehicles (aerial, hydro, and terrestrial) with photogrammetry, LiDAR, and SLAM remote sensing. Another bit of good news is that computing power is higher than ever and that storage space is cheap for all this data. We should also include how 5G has expanded our reach and, with cloud storage, we can work from just about anywhere. We can do so much more than most of us ever dreamed of, so we need to leverage that into creating a digital entity that can be helpful.
Photo: RyanJLane/E+/Getty Images
HOW TO IMPLEMENT THE LATEST TECHNOLOGY
Augmented reality is one of many new technologies surveyors need to introduce into their toolbox. Many of you may be asking where to begin; my answer, depending on your age, may offend you.
Hire a Gen Zer. Really.
As a Gen Xer, I have come to realize my limitations on technology and being able to fully implement it. The Z generation, while lacking the experience of us wily old guys, see things much differently. The smartphone/tablet/computer, and even the latest data collectors, are designed with them in mind. They grew up playing computer games based in virtual reality, developed excellent hand-eye coordination, and find efficient ways of getting things done. Our surveying world is almost completely digital (when is the last time a client only wanted paper copies of a plat?), so now is the time to make the leap and ditch the drafting table. We have as much to learn from them as they do from us. Together, we can get the surveying profession ready for the next generations. It has been a great profession for us, so let us hand it off to the Z generation. They will (eventually) be glad we did.
Quectel Wireless Solutions, a global supplier of modules for the internet of things (IoT), has announced the release of two new 5G New Radio (NR) module series, the RG500S and RM500S.
Based on the new Qualcomm 315 5G IoT Modem-RF System, both modules can support customers in building dedicated 5G devices for a variety of verticals including industrial IoT, retail, smart energy, private 5G networks, and many others.
The RG500S and RM500S both integrate a multi-constellation GNSS receiver, which simplifies the product design and provides accurate positioning services for users.
Utilizing the powerful Qualcomm 315 5G IoT modem, the RG500S and RM500S support extended-life software maintenance, helping create long-lasting IoT devices for the duration of their life span. Offering seamless integration, the RM500S is pin-to-pin compatible with Quectel’s LTE Cat 4 module EM05, Cat 6 module EM06, Cat 12 modules EM12-G/EM12xR-GL, Cat 16 module EM160R-GL and 5G module RM500Q, which provides more competitive 5G solutions to the IoT market. These features will help accelerate the 5G IoT market in the industrial and consumer IoT segments with use cases across robotics, automation, intelligent manufacturing, energy distribution, precision agriculture, construction, and mining.
Photo: Quectel
The RG500S and RM500S modules support 5G NR sub-6GHz bands in stand-alone mode offering backward compatibility with LTE networks. With network slicing in stand-alone mode, the two modules are able to offer end-to-end traffic isolation for critical traffic, guaranteed data rates and bandwidth, and lower latency than in non-standalone mode, which meets the demands of ultra-reliability and service-level agreements of typical industrial and enterprise scenarios.
The two modules are embedded with rich interfaces and incorporate high-speed USB 3.0/3.1, PCIe 3.0, U(SIM), RGMII and more, making them suitable for diversified industrial and consumer 5G applications such as industrial routers, robots, automation, intelligent manufacturing, smart cities, energy distribution, precision agriculture, construction and mining.
“Quectel has long been collaborating with Qualcomm Technologies to support the enablement of the 5G market in IoT,” said Patrick Qian, CEO, Quectel. “Based on the latest Qualcomm 315 5G IoT modem, the RG500S and RM500S are able to offer greater possibilities for the industrial and commercial IoT verticals. Features such as high performance and low latency as well as extended life software maintenance address the existing IoT market needs and can power a range of new 5G IoT use cases.”
“The Qualcomm 315 5G IoT modem solution was introduced to stimulate and scale the 5G IoT industry and enable the transitions needed to make 5G for IoT a reality. This solution is pin-to-pin compatible with legacy modules, which can accelerate device development and commercialization and promote growth and expansion in the 5G IoT industry. Integrating Qualcomm Technologies’ purpose-built modem into Quectel’s RG500S and RM500S modules will help deliver 5G to the IoT industry across industrial and enterprise applications,” said Jeffery Torrance, senior vice president, product management, Qualcomm Technologies.
Positioning, navigation and timing (PNT) orbs guide 50-ton robots carrying containers at the Ports of Auckland.
In a world-exclusive report, GPS World visited with officials at the Ports of Auckland, New Zealand, and the Australian company Locata to reveal a revolutionary port automation system. Locata’s navigation system could change the way containers are handled around the globe, and open the floodgates for next-generation automation of Critical National Infrastructure sites.
Global shipping lines, ports and container terminals are at the heart of the immense, multi-trillion-dollar global logistics market, and ports are classed as critical infrastructure in many nations.
Much of the world’s port infrastructure is old, has no space to expand, and strains at the seams as it faces the reality of handing larger cargo volumes and massive new container ships —some with more than 22,000 containers on board. Efficiently managing the huge spike in container moves caused by the arrival of these gigantic new vessels is a critical requirement for container terminals and their logistics chains, and the problem will only become more acute.
Once arriving at port, container vessels are offloaded by ship-to-shore (STS) cranes. (Photo: bfk92/E+/Getty Images)
Automating operations at ports and intermodal hubs to accelerate their throughput is an obvious solution. “Automate or die” is now an accepted industry mantra, and indeed a small number of terminals around the world have been automated in the past. Early attempts at using GPS for positioning autonomous machines promptly fizzled, however. A chaotic environment of gigantic moving metal machines and constantly changing metal container stacks creates insurmountable blockage and multipath position errors. The environment makes it impossible to guarantee ultra-reliable, centimeter-level GNSS positioning.
In the past, the industry had to resort to providing basic-level positioning by drilling holes to install (with no exaggeration) between 50,000 and 500,000 RFID transponders or magnets in the port’s pavement. This was extremely tedious and labor intensive, and came with serious downsides. The transponders do not work well for differing machine sizes because they usually require reader antennas, the size of two regular house doors, under the machine. Furthermore, the drilling deteriorates the pavement — the ports’ most valuable asset.
The biggest problem, however, was that for a fully operational site like Auckland — known as brownfields in the industry — the port often would have to be closed for years to allow the transponders and pavement to be installed. Such a shutdown isn’t feasible for most operating ports; hence, brown-fields were considered next-to-impossible to automate.
Although this may seem to be less of an issue for new greenfields ports (those built from scratch), buried transponders essentially lock in the mobility and usage patterns for any port, requiring another shutdown to make changes. In all, the logistics industry and its machine manufacturers urgently need a viable, flexible, reliable positioning solution for terminal automation — and soon.
A New Solution
It’s now been revealed that a new solution for this urgent requirement had, in fact, been in stealth mode development for many years. Due to commercial competitive considerations, all the work had taken place under the radar and without publicity. Konecranes, the largest port machine manufacturer, had been developing fully autonomous straddle carriers specifically to address this market, in partnership with Australian company Locata Corporation.
This totally new automation system is being rolled out now at multiple terminals around the world. The first port to emerge with this trailblazing capability is the Ports of Auckland.
Locata’s ground-based GNSS-like positioning system is changing the game for logistics terminals. The Ports of Auckland is the first of many ports and logistics hubs around the globe currently operating or installing Locata (see Figure 1). In the process, the port is delivering the global logistics industry a raft of world-first capabilities.
Figure 1. The Ports of Auckland covers 140 acres at the doorstep of Auckland’s central business district. The outline shows the approximate coverage of the LocataNet local positioning system (landside only). (Photo: Ross Clark/Ports of Auckland)
Partners on this project — the government owners of the Ports of Auckland; its system supplier Konecranes; and Locata — are breaking new ground and in the process opening the floodgates for next-generation machine automation of critical national infrastructure sites.
Groundbreaking Capabilities
Living on an island means every-day items are delivered via cargo ships. That’s certainly the case in Auckland, New Zealand’s largest city, which has a harbor on the Pacific Ocean.
The Ports of Auckland is the largest terminal for commercial freight that arrives in New Zealand. Its 140-acre international trade port is in the heart of the city and surrounded by water, so expansion by reclaiming land is out of the question, even as the country continues to grow.
With this situation, the port’s operator was faced with the seemingly impossible: double the handling capacity of the port in a few years without reclaiming any more land. They turned to automation and cutting-edge technology to find a solution.
Everything that arrives at the port is in a standardized shipping container. The port’s plot of land is usually crammed with the maximum number of containers it can hold. The Ports of Auckland had to seek out automation that increases the terminal’s capacity by stacking containers higher, stacking them close together, and generally making things move faster and more efficiently.
For inbound cargo, once a container is unlocked from its ships, ship-to-shore (STS) cranes unload them to ground level. Straddle carriers then lift and move each container to a ground-level holding area, where it is stored and then transferred to a truck or a train that will deliver it to its ultimate destination.
Export cargo arrives at the port via truck or train, and the straddle carriers handle them through the port’s storage areas to be loaded onto a ship.
The port also handles trans-shipments; containers that arrive via a ship destined to be loaded onto another ship. These handling processes are repeated over and over around the clock, operating pre-automation at a capacity of around 900,000 containers per year.
Straddle carriers are the workhorses of the operation, moving containers within the port. Manual straddles are operated by trained onboard drivers and can stack containers two high. In a traditional manual environment, a driver’s time is divided between tasks that require skill such as picking up a container from the STS crane, or on repetitive work — like organizing containers for efficient loading onto ships, trains and trucks — which are tasks that can readily be automated.
By adding automation, the Ports of Auckland created a mix of manual and automated straddles working together at the terminal. Drivers are assigned the more interesting and skillful tasks, while the automated robotic straddles carry out the repetitive, “boring” tasks.
“Very soon, when the automation system is fully implemented, our straddle carrier fleet will consist of 27 Konecranes Fully-Automated Straddle Carriers (A-STRAD), and 24 manned straddle carriers,” said Ross Clarke, program manager of Auckland’s Port Automation Project. “This interaction of manned and automated machines, without any physical infrastructure separating them, is a world first.”
The A-STRADs are bigger than the manual straddles. The 50-ton, four-story-high machines can move 40-foot containers weighing 50 tons around the port at up to 30 kilometers per hour. Each can stack containers up to three high and closer together.
Five fully autonomous Konecranes A-STRADs at work in the Ports of Auckland. The Locata VRay Orb antennas can be seen at the top of each straddle. (Photo: Photo: Ross Clark/Ports of Auckland)
With the new automated system, the Ports of Auckland will almost double the capacity of the terminal to 1.7 million containers per year once automation is fully implemented in early 2021.
The Ports of Auckland chose Konecranes to supply the fully-autonomous straddle carriers. With no cab, A-STRADs are uniquely identifiable as autonomous. A-STRADs can drive around the port, lifting and moving containers in the same way as their manual predecessors, using their spreader and assisted by the onboard sensors. A critical difference is how they position themselves and how they safely operate in an environment with many other objects, manual straddles, A-STRADs and container stacks.
At the heart of this capability is the Locata local positioning system. It allows A-STRADs to reliably position themselves to centimeter-level accuracy throughout the terminal work area. Every A-STRAD has two Locata antennas, each attached to a Locata Rover receiver, that enable an A-STRAD to accurately determine its position and orientation.
Driver Assistance. Both the A-STRADs and the manual straddles at the Ports of Auckland are positioned using Locata technology. The manned straddle carriers are fitted with a driver-assistance system, which is also positioned by Locata, so their operations can be monitored and coordinated in lock-step with autonomous A-STRADs.
“The driver assistance system operates a lot like the auto-parking system in a car,” Clarke said. “When manned straddles are near the interchange area where they interact with A-STRADs, operators change to driver-assist mode and can take their hands off the steering wheel, allowing the system to autonomously guide the straddle carrier to the correct stack location with an accuracy of +/–3 cm.”
Roots of a New Strategy
The groundbreaking positioning system has been in the works for several decades.
“Locata has been working on this ‘terrestrial replica of GNSS’ capability for 25 years,” Locata CEO Nunzio Gambale told GPS World. “It didn’t spring up one day just because co-founder David Small and I thought, hey, we’d like to replace the GPS satellites.
“Our driving vision has been to provide accurate performance in myriad environments where we always knew GNSS was going to fail to deliver,” Gambale continued. “Importantly, what you see today is not just ‘a lab experiment’ or a prototype test system. It’s operationally deployed, enabling some of the most demanding positioning applications on Earth. Our team has been laser-focused on developing real technology which improves on GPS-like positioning, and delivering solid solutions for real-world problems modern applications now face.”
The Locata System
Two LocataLite transmitter antennas, installed 23 meters up a light pole, provide high-accuracy positioning coverage over part of the Ports of Auckland. (photo: Photo: David Small/Locata)
LocataLites. Locata is a local positioning system that uses a network of synchronized transmitters, known as LocataLites, installed in and around the port to cover all straddle work areas. The LocataLites work like miniature GPS satellites, transmitting GPS-like signals using two frequencies in the 2.4-GHz ISM band.
LocataLites are strategically installed and configured to deliver reliable centimeter-level accuracy, with particular attention paid to the geometry available from the network when the installation layout is designed. This LocataLite network (called a LocataNet) enables the equipment on each straddle carrier to trilaterate its position using a method similar to GNSS positioning.
Locata technology is built upon two critical proprietary capabilities developed and perfected over many years: TimeLoc and multipath mitigation. To date, Locata has been granted more than 160 patents on these core advances.
Sub-Nanosecond TimeLoc. First, LocataLites use their own broadcast signals to time synchronize with each other using a proprietary technology called TimeLoc. This allows all the LocataLites in a LocataNet to time synchronize with each other to sub-nanosecond levels without requiring atomic clocks.
Mutipath Mitigation. Second, Locata’s proprietary multipath mitigation technology enables Locata receivers to correctly track direct signals, even in an environment filled with reflected signals. Multipath is the main reason GNSS can’t deliver the accuracy and reliability required at a port.
Locata’s multipath mitigation technology has two components: the Locata receiver and the VRay Orb antenna.
Locata receivers. The receivers incorporate a proprietary signal-processing technique, correlator beamforming (CBF), which delivers beam-forming capability comparable to advanced phased-array antennas.CBF allows the Locata receiver to combine signal samples from its multiple antenna elements to form virtual “beams,” and any signal outside of a given virtual beam is ignored.
Unlike traditional phased arrays, however, the Locata CBF system is markedly less complex and orders of magnitude less expensive. CBF uses only one RF front end, yet it can form millions of individually-steered beams per second.
VRay Orbs. The straddle carriers at the Ports of Auckland are the first commercial operating deployment of Locata’s VRay Orb antennas, with two orbs atop every A-STRAD as well as the manual straddles (Opening Photo).
A row of Locata VRay Orb60 antennas atop Konecranes A-STRAD machines stretch into the distance toward Auckland’s business district. (Photo: David Small/Locata)
Bespoke Positioning
The placement of LocataLite positioning transmitters on any site is entirely within the control of the LocataNet designer. “Our partners can place them where they want, in as high a density as they want, and as accurately as they need to get their job done,” Gambale said. “The LocataNet delivers rock-solid, super-reliable positioning in environments where that wasn’t possible before.”
With GNSS, users have no control over the geometry of the satellites in view. “That’s a huge problem in many of these high-accuracy applications because it can greatly affect your DOP [dilution of precision] geometry,” he added. “Engineers trying to rely on GNSS can see huge variability — or complete failure — in a machine’s position. Unreliable positioning is not acceptable when an enterprise is relying on 50-ton autonomous machines, doing critical work that you cannot afford to stop.”
According to Clarke, “Locata is well-suited to our requirements as it offers high precision, high resistance to interference, and high reliability.”
Breakthroughs at the Port
Locata’s enabling technology has brought multiple breakthrough advantages to terminal automation. Critical among them is the ability to automate a terminal while in full operation.
“Because our container terminal is working at high utilization, with no spare space to operate, we are deploying the automation in two phases,” Clarke said. “The first phase started commercial operations in August 2020, and we have now handled more than 35 ships using the automated system. The next phase, with the entire terminal running fully operational automation, is scheduled to enter service in early April 2021.”
Flexibility. The new system also provides extreme flexibility to alter the layout of operations in real time, something never possible with transponders embedded in the ground. A-STRADs drive around using a digital map. With Locata, this map can be changed as often as needed without having to change anything in the infrastructure.
Reduced Wear and Tear. Before automation, line markings on the pavement guided operators on paths and in storage areas. While this kept operations orderly, following the marked lines caused ruts in the pavement that eventually require costly and time-consuming repairs.
“With A-STRAD positioning being so precise and repeatable, this accuracy could have caused serious ruts and also become a problem,” Clarke said. “With Locata and the ‘invisible’ digital pavement markings, we came up with a cool solution to this that we call ‘stack shuffling.’ We shift the digital drive paths and storage plots over time so that wear and tear on the pavement is spread more evenly, requiring fewer repairs to the tarmac.”
The shuffling is imperceptible to a human, but the A-STRADs are spreading the wear across the entire tarmac and greatly extending the service life of the terminal surface, according to Clarke.
Less Fuel. The automation also brings significant environmental benefits. “A-STRADs use approximately 10% less fuel, which means they are indeed cheaper to run,” Clarke said.
Locata-enabled manned straddles near STS cranes unload a ship at dusk. (Photo: Photo: David Small/Locata)
Autonomous and Manned
Ensuring the safety of workers, machinery and cargo is a critical requirement at any port. All parts of the Ports of Auckland’s new system were tested for two years, including system software from both Konecranes and Locata.
The software was tested in pieces as it was developed. Then, full system functionality was delivered and tested. Both automated and manual straddles are centrally monitored and coordinated by this terminal operating system.
Working Together. Auckland’s port is the first in the world to use autonomous and manned machines together without a physical separation. This allows skilled operators to manually handle operations in specific areas, while the autonomous A-STRADs are tasked with monotonous and time-consuming jobs with no practical limitation on the machine’s repeatability.
Within the access-controlled premises in Auckland, all work areas are constantly monitored by the centralized system. The Locata system tracks the location of all straddle carriers at all times.
Training. All manual straddle drivers go through virtual and hands-on training with specific attention paid to safety protocols.
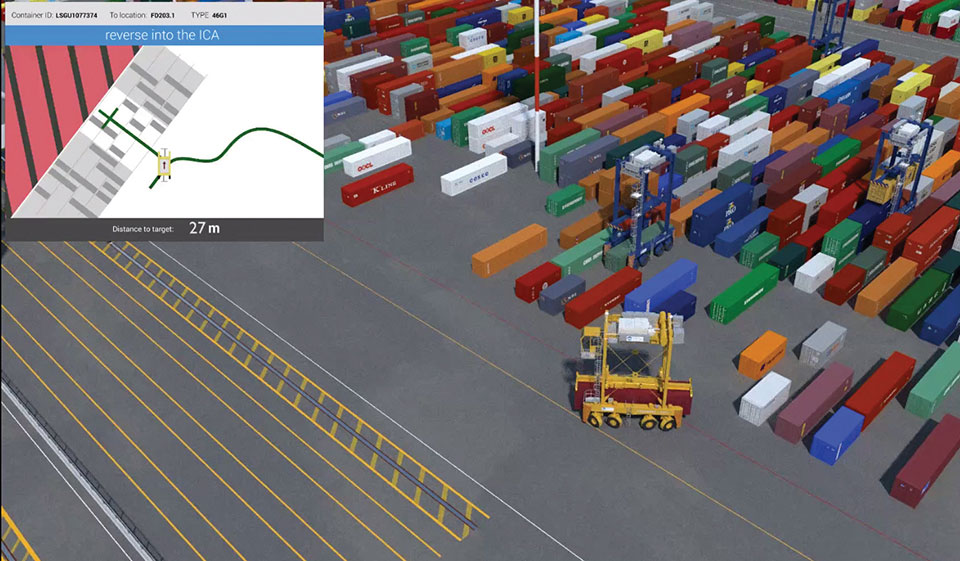
“Once they’ve first learned what to do in a simulator,” Clarke said, “they then carry out the same tasks with an instructor in a real straddle carrier. We also train our control room staff in a virtual training environment that’s a bit like a container terminal version of a flight simulator.” Figure 2 shows the screen of the operator training simulator.
Figure 2. The straddle carrier simulator used for manual straddle operator training shows (top left) the container drop-off location, designated path, and open and restricted zones. (Photo: Ross Clark/Ports of Auckland)
Laser Scanners. As a last line of defense, autonomous A-STRADs are equipped with laser scanners that detect obstacles and automatically engage collision prevention measures, if required.
More Locata Applications
Port machinery automation is the most recent industrial sector to reveal the adoption of Locata technology. However, Locata is already used by large industry partners for deep-pit mining where mine pit walls act like deep urban canyons and severely limit the sky view. (See GPS World, March 2017.)
Locata also is being used as the core truth reference positioning system at the U.S. Air Force (USAF) White Sands Missile Range. There, it is independently providing high-accuracy non-GPS-based positioning when GPS signals are heavily jammed; this is practically the Holy Grail for alternative PNT, and the USAF has been using the system operationally at White Sands since 2016. (See GPS World, January 2020.)
NASA is another Locata user, working with the Federal Aviation Administration on research for next-generation air traffic control. Numerous other applications are currently in stealth development.
Gambale said the company’s technology is not representative of a solution just for ports, mines, aviation, military or any other specific application. “Our ground-based technology has myriad advantages in the many environments where satellite-based positioning was never designed to work. We can change the game for many modern applications because Locata allows users to have total control over where transmitters are placed, the power they transmit, the design of their network structure, and much more.”
For more than 10 years, the company worked to develop technology to reduce multipath — the bane of high-accuracy GNSS positioning in urban, industrial, indoor and occluded areas.
“Those are all real-world environments where satellite-based signals cannot be tracked reliably enough for next-gen, extremely demanding applications like fully-autonomous operations,” Gambale said. “Our business is the direct result of GPS changing the world, and the industry then fueling a largely unqualified public expectation that centimeter-level positioning would be available everywhere. Clearly, that is not correct.
“The growing roster of huge, globally significant companies adopting our technology for applications that go beyond GPS limitations shows our developments deliver real benefits to many markets. Auckland is living proof that Locata is a true, terrestrial, centimeter-accurate alternative-PNT system.”
At ION GNSS+ in September, I met with Nunzio Gambale and Paul Benshoeff of Locata. They were excited to share their news about the timing tests conducted at White Sands Missile Range by the U.S. Air Force’s 746th Test Squadron.
In the January issue, we share the results of the tests. The two also showed me and Matteo Luccio, our contributing editor, a YouTube video highlighting another Locata project: guiding 100-ton robots around the Ports of Auckland, New Zealand.
The robots are straddle carriers, giant mechanisms that are usually driven by a human. The carriers move and sort the shipping containers as they arrive from ships and leave via truck or train.
In the new setup, Locata has made possible the elimination of the human element with nanosecond-precision tracking.
Tom Scott, a former Sky One television host and now host of a series of YouTube shows, highlighted the robotic system in April 2019 on his “Amazing Places” channel.
Screenshot: Tom Scott video
Compared to manned straddle carriers, the automated straddle carriers (A-STRADs) are able to stack the containers closer, higher and work more steadily, increasing the capacity of the limited land space at the port. The A-STRADs can stack containers with the accuracy of a few centimeters.
The automated system also allows stack shuffling, so that wear and tear on the asphalt is spread more evenly and requires fewer repairs.
The Locata local positioning system uses synchronized transmitters installed around the port, with two antennas on each straddle carrier using the lightspeed delay from each transmitter to find exact position. “They don’t just look at the timing signal itself, they track the phase of each transmitter’s carrier signal,” Scott explained.
GNSS receiver manufacturer Septentrio has added the AsteRx-i S to its GNSS/INS product portfolio.
The AsteRx-i S combines Septentrio’s compact, multi-frequency multi-constellation GNSS engine with an ultralight external industrial-grade MEMS-based inertial measurement unit (IMU).
Designed around demanding requirements for size, weight, power consumption and temperature variation, the AsteRx-i S is designed for various applications such as inspections with UAVs, UAS photogrammetry, automation, robotics and logistics.
Calibrated for wide temperature ranges, the AsteRx-i S delivers accurate and reliable GNSS/IMU integrated positioning to the centimeter-level, as well as full attitude at high update rates and low latency, the company said.
Key benefits for users include:
GNSS/INS positioning with 3D attitude: heading pitch and roll
AIM+ interference monitoring and mitigation system
High-update rate, low-latency positioning and attitude
Small and ultralight IMU (10 grams)
Robust calibration for wide temperature ranges
“We are delighted to broaden our AsteRx-i GNSS/INS solutions range, bringing maximum flexibility and choice to our customers,” said Francesca Clemente, product manager at Septentrio. “Whether for direct georeferencing in mapping applications with UAVs, for managing containers in a port or for innovative small robots in agriculture, the compactness, affordability and robustness of the AsteRx-i range allows our customers to focus on their success.”