While grapes are being harvested throughout Italy, the Politecnico di Milano is looking to the future of viticulture with an innovative approach that combines mechanics, IT and digital simulation.
A team of researchers from the Departments of Mechanical Engineering and Electronics, Information and Bioengineering at the Politecnico di Milano has developed a system to test and optimize self-driving strategies for agricultural tractors in a virtual environment.
The study, published in AgriEngineering (“Scenario Generation and Autonomous Control for High-Precision Vineyard Operations}, presents a complete methodology for creating realistic vineyard scenarios and evaluating control algorithms for autonomous driving. The goal is not simply to reduce the human presence, but to provide a high-fidelity digital environment in which to develop, verify and safely improve agricultural automation solutions based on sensors and predictive algorithms.
The research has made it possible to create a digital twin of the vineyard, capable of reproducing slopes, soil irregularities and row layout. Tractors equipped with low-cost GNSS and inertial measurement systems (IMS) sensors and guided by advanced algorithms have been tested in this virtual environment, vehicles capable of moving autonomously between rows and of performing off-field turning manoeuvres with the utmost precision.
The study explored new methodologies to simulate and independently control vineyard operations. (Credit: Politecnico di Milano, CC BY-SA).
“Our approach combines terrain modeling, advanced control and realistic sensors in a single simulation environment. This speeds up research and reduces the risks and costs of real field tests,” said Federico Cheli, professor at the Politecnico di Milano, Department of Mechanical Engineering, and project coordinator.
According to the researchers, the use of realistic simulations not only reduces the risks and costs of field tests, but can also become a useful tool for operator training. It can accelerate the adoption of new agricultural technologies.
The project stems from the partnership between researchers at the Politecnico di Milano and the company Soluzioni Ingegneria s.r.l. that develops software for dynamic vehicle simulation. It is part of a broader context of cooperation with industrial companies engaged in research on automation and sustainability in agriculture.
Ruiz Mayo, C.; Cheli, F.; Arrigoni, S.; Paparazzo, F.; Mentasti, S.; Pezzola, M.E. Scenario Generation and Autonomous Control for High-Precision Vineyard Operations. AgriEngineering 2025, 7(2), 46. https://doi.org/10.3390/agriengineering7020046
SingularXYZ has released the SAgro150 automated steering system for precision agriculture.
The product aims to provide farmers with an easy way to get started with auto-steering while increasing productivity. With full-constellation tracking capability, the SAgro150 realizes ±2.5cm auto-steering accuracy to maximizes land use and yield while saving resources such as water and fertilizer.
When compared to the first-generation SAgro100 system, the SAgro150 auto-steering system uses a single-antenna solution instead of a dual-antenna solution. It also features simpler integration options, only requiring a strong magnetic chuck to securely attach the antenna to the top of the tractor for satellite signal tracking. The new system also adopts dual gyroscope mode, enhancing the heading data reliability and compatibility with different tractors.
Upgraded from the SAgro100 auto-steering system, the SAgro150 has also inherited all of its advantages. Facing different tractor models, different farm terrains and working tasks.
The new system aids in work modes including rotary tillage, ridging, sowing and harvesting in straight line, curve, U-turn and more.
The Trektor hybrid robot for agriculture, made by the French company SITIA, can work on a variety of crops by changing the width of its wheelbase and can perform many repetitive tasks, such as spraying and hoeing. (Image: SITIA)
Precision agriculture has been around for more than 30 years and now covers the majority of U.S. farmland. It refers to the ability of farmers to observe, measure and respond precisely to the variability of soil and crop characteristics within and between fields by using maps of these characteristics and GNSS navigation. It enables them to reduce inputs of seed, water, fertilizer, pesticides and fuel while increasing outputs. It also enables them to work at night and in the fog and automate many functions at large feed lots.
For precision agriculture, GNSS integrity can mean the difference between, say, a robot protecting a vineyard by weeding and spraying pesticides or damaging it by straying onto the vines.
Autonomous Tractors, Mowers, and Feed Monitors
SITIA, a French company, has developed an autonomous tractor that is used by, among others, an organic vineyard in France’s Loire valley to tirelessly weed the narrow rows between the grape vines — compensating for the movement of young workers to cities. Thanks to the high accuracy and integrity of the Septentrio GNSS heading receiver inside, the autonomous tractor has decreased the damage to the vineyards by more than an order of magnitude compared to the traditional work done by a farmer with a manual tractor.
Renu Robotics, based in San Antonio, Texas, makes a robot for vegetation management, called Renubot. It uses machine learning, a form of artificial intelligence, to plan its route, optimize its energy consumption, perform self-diagnostics, collect environmental data and assess the topography that it traverses.
Navigation is based on a stored map of paths, a Septentrio RTK GPS receiver and sensors to avoid obstacles. A radio link enables the Renubot to communicate with a control center, for reporting and updates. When the Renubot returns to its recharge pod, it charges its lithium battery and performs updates and downloads.
Manabotix Pty. Ltd., an Australian company, has developed an automated system to monitor cattle in large feedlots, using GNSS, lidar scanning and other vision or perception technologies and artificial intelligence. This has greatly improved the accuracy and consistency of feedlot volume estimates, which for the previous 150 years had been the responsibility of a select few employees, who would visually gauge the amount of feed in concrete troughs. This visual inspection by humans was inherently imprecise, subjective, and inconsistent, often causing animals to eat too much or too little one day and get off their optimal growth curve or even become ill. Manabotix’s solution consists of a Septentrio AsteRx-U GNSS receiver and antenna, a lidar scanner, and an onboard processing platform.
Statistical Analysis
Integrity is a key aspect of all these applications. A part of delivering integrity is a statistical analysis called receiver autonomous integrity monitoring (RAIM), which was developed for such safety-critical applications as aviation or marine navigation. A refinement of RAIM, called RAIM+, takes this analysis to the next level as part of a larger positioning protection package.
For autonomous operation, it can be particularly hazardous to be overly optimistic about GNSS accuracy. This parameter is reported in the form of positioning uncertainty, which is the maximum possible error on the calculated position. It is especially necessary in challenging GNSS environments, where the receiver has a direct line of sight to only a limited number of GNSS satellites or where GNSS signals are degraded. RAIM alerts users when their receiver’s uncertainty strays beyond the limits they have chosen for their application.
Users can be deceived by a consistent position or movement — which can be consistently inaccurate. The positioning uncertainty gives them an indication of the extent to which they can rely on their receiver’s positioning accuracy at any given moment. The receiver operator can set an alarm limit, so that the receiver can flag situations when positioning uncertainty becomes too large.
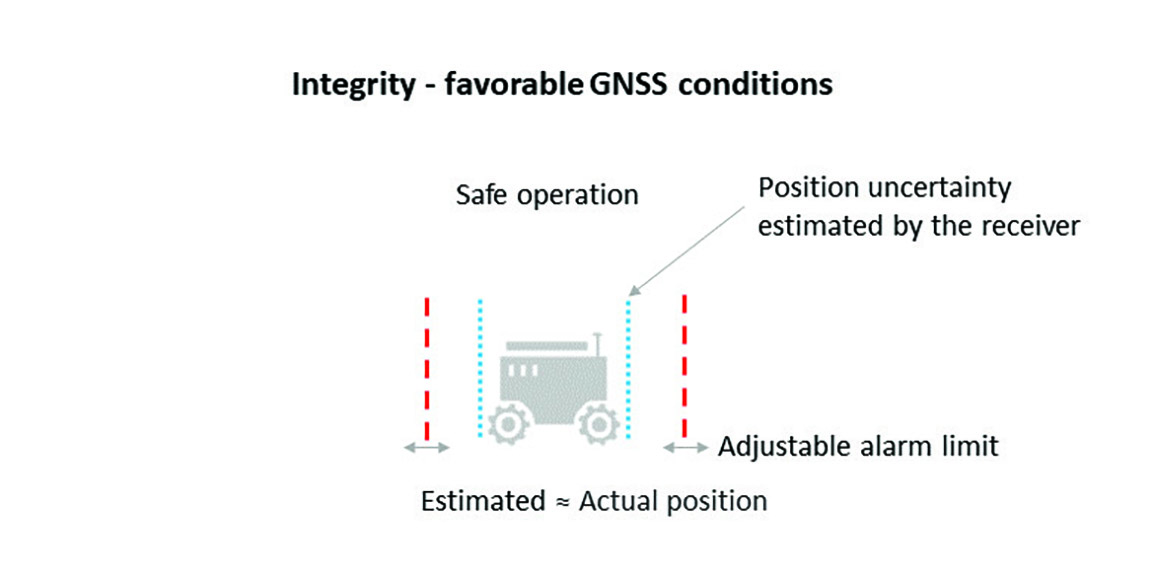
The blue line in Figure 1 shows position uncertainty estimated by a GNSS receiver under favorable conditions, when the view of the sky is unobstructed, and the receiver has a direct line-of-sight to many satellites.
Figure 1. Under good GNSS conditions, the position uncertainty shown by the blue lines is well within the alarm limits, indicating safe operation. The actual position of the receiver should always remain within the blue uncertainty boundaries. (Image: Septentrio)
During favorable conditions, the positioning uncertainty stays well below the alarm limit because the calculated position is almost the same as the robot’s actual position. However, in challenging environments, the truthfulness of positioning uncertainty becomes most critical (see Figure 2).
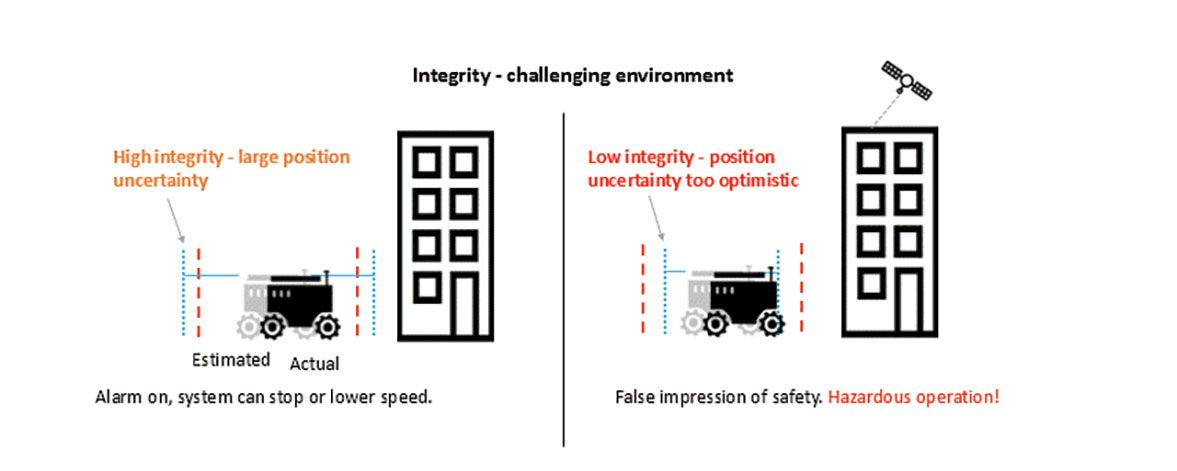
Figure 2. In challenging environments receivers with high integrity report large positioning uncertainty, flagging possible inaccuracies to the system. If the receiver is too optimistic about its accuracy, the operation becomes hazardous. (Image: Septentrio)
For instance, when the view of the sky is partially obstructed by buildings or foliage, the receiver has access to only a limited number of GNSS satellites, making it harder to calculate accurate position. In such cases the receiver must report a higher positioning uncertainty, so that the system can take adequate action such as switching to lower speeds, staying further away from predefined boundaries, or stopping.
A low integrity receiver may keep reporting an optimistic positioning uncertainty, that stays below the preset alarm limit even when the calculated position is way off from the actual position. The number may look fine, but effectively it becomes a “robot on the loose,” no longer on its planned path with a risk of damaging itself and its surroundings.
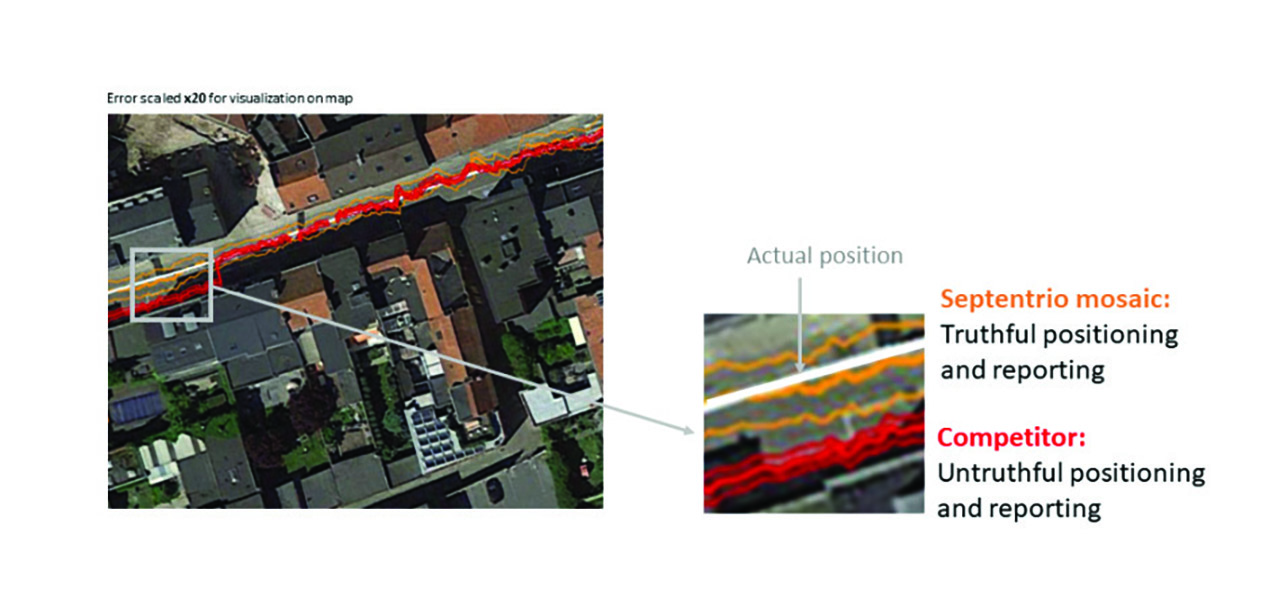
Let us look at uncertainty limits in action during a GNSS car test in an urban canyon, where the view of the sky is partially obstructed by houses (see Figure 3). The orange lines are the positioning and its uncertainty boundaries reported by a Septentrio mosaic GNSS module in the car, while the red lines are the positioning and its uncertainty boundaries reported by another popular GNSS receiver. The white line shows the actual position of the car as it drives along the road. The orange uncertainty boundaries of the mosaic receiver are truthful and somewhat wider in this challenging environment, and you can see that the actual position always remains within these boundaries. On the other hand, the red trajectory jumps off course in a certain challenging spot on the road, with the actual position no more within the uncertainty boundaries, which remain too optimistic. In this case the competitor’s receiver gives a false sense of security and the system is unaware of its hazardous operation.
Figure 3. In an urban canyon car test the Septentrio receiver reports truthful position uncertainty. A competitor receiver seems to be more accurate, while the actual position is not even within its reported uncertainty boundaries. (Image: Septentrio)
If the receiver depicted by the red line provided navigational information for an ADAS automotive system, for example, this could mislead the system into thinking that the car switched lanes. If the system then attempted to correct the trajectory by switching back to the “correct lane” this would result in taking the car off course and potentially hitting the sidewalk or even another car.
RAIM vs RAIM+
The underlying mechanism behind truthful positioning uncertainty reporting is RAIM, which ensures a truthful positioning calculation based on statistical analysis and exclusion of any outlier satellites or signals. Septentrio receivers are designed for high integrity and take RAIM to the next level with RAIM+, guaranteeing truthfulness of positioning with a high degree of confidence.
In Septentrio receivers RAIM+ is a component of a larger receiver protection suite called GNSS+ comprising positioning protection on various levels including AIM+ anti-jamming and anti-spoofing, IONO+ resilience to ionospheric scintillations, and APME+ multipath mitigation.
Septentrio has fine-tuned its RAIM+ statistical model with more than 50 terabytes of field data collected over 20 years. It removes satellites and signals which may give errors due to multipath reflection, solar ionospheric activity, jamming and spoofing, while working together with the GNSS+ components mentioned above. Because of this multi-component protection architecture, it achieves a very high level of positioning accuracy and reliability which goes well beyond the standard RAIM. The RAIM+ statistical model is adaptive, highly detailed, and complete, taking advantage of all available GNSS constellations and signals. The full RAIM+ functionality is also available in Septentrio’s GNSS/INS receiver line. User controlled parameters allow it to be tuned to specific requirements.
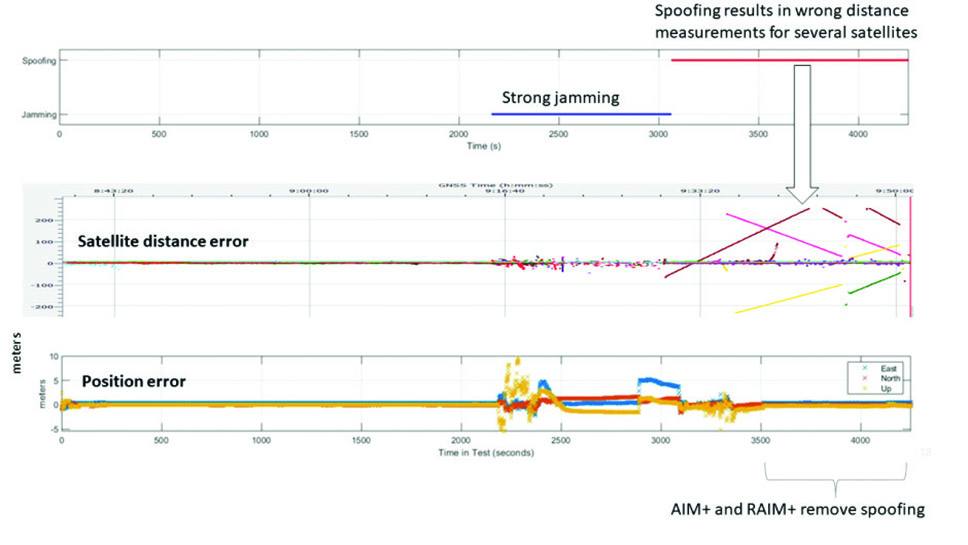
The diagram in Figure 4 shows RAIM+ in action during a jamming and spoofing attack on a Septentrio GNSS receiver. While AIM+ removes the effects of GNSS jamming, both AIM+ and RAIM+ work together to block the spoofing attack. Satellites with high distance errors, shown on the middle graph, are removed by RAIM+ since they do not conform to the expected satellite distance.
Figure 4. In this scenario jamming gives satellite distance errors but is countered by AIM+ technology. During spoofing AIM+ eliminates some of the spoofed satellites, while other satellites that have wrong distances are dismissed by RAIM+ algorithms. (Image: Septentrio)
This example shows that even in the case of jamming and spoofing, Septentrio’s high integrity receiver technology delivers truthful and reliable positioning on which any autonomous system can count.
GNSS Design Around Reliability
GNSS receivers designed to be reliable strive for high integrity in both reporting of the positioning uncertainty as well as in RAIM+ advanced statistical modelling. This ensures that these receivers provide truthful and timely warning messages and are resilient in various challenging environments. Other technologies such as inertial navigation system (INS) can also be coupled to the GNSS receiver to extend positioning availability even during short GNSS outages. Quality indicators for satellite signals, CPU status, base-station quality and overall quality allow monitoring of positioning reliability at any given time. High-integrity GNSS receivers provide truthful positioning in autonomous machines such as the SITIA weeding tractor. They are also crucial components in safety-critical applications, assured PNT and any other application where accuracy and reliability matters.
For farmers, every centimeter counts. ComNav’s AG360 Pro autosteering system controls pass-to-pass accuracy within 2.5 cm. (Image: Daniel Balakov/E+/Getty Images)
How do you define precision agriculture?
Precision agriculture uses new technologies to obtain as much as possible the unique characteristics of a field and input the correct amount of resources at just the right time. It is a system that needs to be implemented throughout the whole process of crop growth, including land preparation, tractor guidance, water management and weather monitoring. Tractors are used at every step, therefore it is critical to make them work consistently throughout the whole process, by using GNSS. ComNav Technology’s autosteering systems can be installed on most types of tractors. This allows farmers to grow the crops in a more autonomous and efficient pattern, which they can then save with high precision and reuse for later steps until harvest, increasing the utilization rate of land and decreasing the use of fuel, water, fertilizer and herbicides.
What have been the key turning points in the development of precision agriculture?
We have been in this sector since 2013. Our current solution is much easier to install and maintain and has higher accuracy and stability. The younger generation of farmers are more receptive to autonomous driving. They would like to try new things and set themselves “free” with technology.
What are the specific requirements and challenges of precision agriculture for GNSS, and how do they differ from those of other kinds of mapping and machine control?
The main challenges for autosteering systems include signal loss and terrain compensation. Most rural areas lack GSM coverages; therefore, in many countries using autosteering requires base stations. However, radio data links between stations far apart could be affected by obstacles, causing frequent correction outages. To compensate for this, ComNav has embedded in its GNSS module its “RTK-Keep” algorithm, which can maintain a relatively high-precision performance for autosteering during corrections outages. The system also must include various terrain compensation algorithms that identify a field’s elevation contours and provide smooth and continuous guidance even in complex terrains.
When did ComNav begin to focus on precision agriculture and why?
In 2013, we introduced our first high precision GNSS board. Initially, our main role was to provide it to integrators with expertise in precision agriculture. Over the years, the market began to boom in China and in 2016 we announced our first generation autosteering system for tractors. The main reason for us to focus on precision agriculture is the increasing demand from the market, which we believe will continue to grow in the foreseeable future due to the increasing demand for food from Earth’s growing population.
What are your relevant products/product lines?
In the past, workers in China drew lines on the land and then planted potatoes roughly along those lines, which was challenging and time consuming. It was hard for the farm owner to hire an experienced driver and guarantee the effectiveness of seeding. Now, however, ComNav Technology’s AG360 Pro autosteering system solves that problem by guiding vehicles according to set routines, including straight lines, curves, automatic turns and headline turns. Importantly, the pass-to-pass accuracy can be controlled to within 2.5 cm. The worker can finish multiple processes within only 24 hours, such as ridging, ditching, sowing, fertilizing and laying drip irrigation under mulch. Furthermore, compared to traditional manual planting, mechanized planting produces a more even sowing rate, which also establishes the foundation for the automated harvesting of potatoes. Potato production has increased by 10% per acre, land use has been reduced by more than 20%, and labor costs have been reduced significantly.
Deere & Company has issued a request for proposals (RFP) to secure a satellite communications solution that will further connect its fleet of intelligent machines. The solution will enhance the satellite connectivity that Deere is delivering to its customers.
“We believe satcon will unlock significant opportunities in agriculture by enabling farmers to take advantage of innovative technologies that rely on real-time information and communication,” said Lane Arthur, vice president of Data, Applications and Analytics at John Deere. “For example, autonomous tractors benefit from real-time communication through the John Deere Operations Center, as farmers use the app to start and stop the machine, monitor the job it’s executing, and determine what it should do when it encounters an obstacle.”
During the initial phase, Deere is seeking a strategic partnership with a vendor or set of vendors to connect both new machines and retrofitted machines through satellite service and ruggedized satellite terminals. This is expected to enable Deere’s customers to be more productive and efficient, and increase food and fuel production.
For more information on the request for proposals, contact [email protected].
Fuel and fertilizer prices are at all-time highs, as farmers the world over are scrambling to find ways to stay financially afloat. Large commercial farms have long had a leg up over smaller holdings. They already have access to artificial intelligence (AI) and cutting-edge hardware to plan their operations and automate tasks. They run broad sensor networks to monitor soil quality, operate vision-enabled drones to monitor crop health, and let autonomous tractors steer across their fields to vastly improve their productivity.
These advanced systems have been prohibitively expensive, to the point that their costs are hard to justify for smaller holdings, less than two hectares in size, which make up the vast majority of the world’s more than 570 million farms. Many of these farmers simply don’t have access to sufficient capital to invest in new equipment, and continue to rely on older machines and human labor. For them, the vast promise of the digital revolution to increase the efficiency of agricultural operations — typically lumped together as smart farming or precision agriculture — has long remained just out of reach.
But change is in the air. Over the past few years, the popularization of the internet of things (IoT) and its underlying technologies has led to the development of a new and more affordable generation of precision farming solutions. These solutions are giving smallholdings tools to increase the quantity and the quality of their production. Combining satellite-based positioning, wireless connectivity and visual sensing with advanced algorithms including machine learning (ML) and artificial intelligence, these solutions promise to help farmers produce more for less, putting them on more equal footing with their larger commercial competitors.
In this article, we take stock of key trends driving the democratization of precision agriculture. We zoom in on some of the concrete applications transforming the operations of smaller farms the world over. We start by exploring the core enabling technologies, the applications they enable, and where they are headed.
Technological evolution on all fronts
Sensor-fusion platforms
At their heart, precision agriculture solutions are sensor fusion platforms, taking in data points from a variety of sensors, using algorithms to make sense of them, and extracting insights on which their users — machine or human — can act. As they mature, these sensor fusion platforms are becoming increasingly complex, crunching more and more types of sensor data with algorithms of growing sophistication to gain ever deeper and higher value insights.
These insights are often generated using AI and ML models that run at the edge of the network near the sensors — on the tractors, sprayers, or other devices themselves — rather than in the cloud.
Equipment manufacturers looking to integrate AI/ML at the edge are weighing their options in terms of adding application processors and hardware accelerators capable of running advanced ML models needed to fuse camera and sensor inputs to make real-time decisions. To simplify the adoption of AI/ML at the edge, many vendors are starting to integrate AI accelerators into their modules and systems-on-chip (SoCs), lowering the barrier to entry.
Original equipment manufacturers (OEMs), for their part, are choosing to integrate these SoCs even if their software capabilities are still behind. For them, building solutions with future-proof hardware is a potentially lucrative strategy for generating recurring revenues through firmware updates that provide advanced functions down the road.
Despite the abundance of evaluation kits from major vendors, scaling from prototypes to production with these solutions can be expensive. While integrated sensor fusion platforms with, for example, pre-loaded dynamic vehicle models for auto-steering or computer vision models for plant health can accelerate development for OEMs and reduce the need for software investment, they can be too generic and may not solve use-case-specific needs. More focused AI/ML may require more investment in data collection and training models, which, due to their proprietary nature could come at a higher price.
Camera systems are already widely relied on by autonomous tractors, visually monitoring the surrounding environment and feeding their data into computer-vision solutions where it is parsed. Context-rich, vision-based data can help optimize the distribution of agricultural inputs such as water, seeds, fertilizers and pesticides using real-time variable spray-rate control based on plant size and other metrics to significantly improve efficiencies and reduce overall costs.
Camera systems come with a set of challenges that need to be carefully managed. Lenses can become contaminated with water, debris, dust, and snow. Even though these issues impact all vision-based applications, including mass-market applications such as automated and autonomous driving, there are still no reliable methods of keeping them clean, aside from water-spraying nozzles (that can cause buildup on the lenses) and old-fashioned manual maintenance.
Additionally, the steep price of high-resolution cameras can drive up the cost of end solutions, as can data storage and communication when the visual data is processed in the cloud.
Global navigation satellite systems
Satellite-based positioning has also become a staple in precision agriculture solutions. Autonomous and guided tractors use the technology to drive vehicles along precise paths to increase pass-to-pass efficiency and reduce overlapping rows. Crop monitoring drones use GNSS technology to patrol predefined flight paths. And fully autonomous guided vehicles such as robotic lawnmowers use it to avoid restricted no-go zones. The latter three applications typically require centimeter-level positioning accuracies.
Centimeter-level GNSS technology has been available for well over a decade, with farmers subscribing to relatively costly GNSS correction services tailored to each user. However, it was only with the advent of affordable RTK services with availability in rural areas, as well as the dramatic decrease in cost for farmers to deploy their own RTK base stations using low-cost modules, that the price point of high precision positioning has come down far enough to make the service affordable to all but the least lucrative operations.
High precision GNSS technology brings the benefits of improved pass-to-pass efficiency – a general reduction of all agricultural inputs with all the financial, environmental, and health benefits that this entails. At the same time, it requires solutions to deal with signal delays and the resulting inaccuracies of multipath effects, caused when signals bounce off buildings, mountains, or other solid structures on their way to the GNSS receiver.
When delivered via the internet, the GNSS augmentation data stream requires an IP connection to the provider’s server. This poses challenges for farms that lack infrastructures such as Wi-Fi base stations, sub-GHz RF systems, or cellular network coverage.
Photo: Avalon_Studio/E+/Getty Images
Wireless connectivity
In some way or another, all advanced precision ag use cases depend on wireless connectivity. Environmental sensors and inspection drones need it to relay data to the cloud backend. Additionally, tractors, drones, and other farm robots depend on it to upload telematics data, report their status, enable predictive maintenance tools to reduce downtime, and receive GNSS augmentation data for high precision positioning.
While cellular connectivity is the easiest to use — all it takes to upload data straight to the cloud is a mobile data subscription and a SIM card — it has two key drawbacks. The first, mentioned earlier, is that the entire farm needs robust network coverage, which is not always a given in rural areas even in the United States and other developed countries. Also, when coverage is available, the cost of data transfers can quickly add up and become prohibitive for smaller, less profitable farms, as they may not be able to negotiate affordable connectivity plans as effectively as larger operations that have much higher data usage.
One way to address the coverage issue is by choosing the right wireless communication technology. Low power wide area technologies, such as LTE-M, NB-IoT, and Cat-1 solutions offer similar coverage to traditional LTE in many countries and are available at a fraction of the cost. When higher bandwidths are required, LTE Cat 4 or higher modules offer 150 Mbps+ of throughput. 5G modules enabling gigabit connectivity are available today, but solutions may cost up to 10-times more.
As an alternative, 5G Redcap – an upcoming 3GPP technology – seeks to provide a 5G compatible, affordable solution with medium bandwidth and lower complexity, enabling affordable hardware. We will likely start to see the first RedCap offerings from mobile network operators in 2025.
Artificial intelligence and machine learning at the edge offer an additional tool to reduce bandwidth requirements, by processing sensed data near the sensors themselves. Rather than streaming vast amounts of raw sensor data to the cloud, devices leveraging edge intelligence can reduce their wireless communication bandwidth requirements and cost by uploading only relevant information.
The trends driving democratization
Progress in sensing and sensor fusion platforms, camera systems, GNSS technology, and wireless connectivity is but one of the drivers democratizing precision agriculture. The other is an ongoing ecosystem-wide transformation that is breaking down many of the barriers that have kept precision agriculture solutions the preserve of large, lucrative farming operations.
Together, they are bringing down the cost of ownership of precision ag technology. Only just a few years ago, the only available solutions from major OEMs came with a hefty price tag, comprising expensive hardware and considerable recurring subscription fees, while requiring skilled labor to implement, operate, and maintain smart equipment.
Vendor lock-in enforced by locking telematics interface ports prevented farms from adopting aftermarket solutions — justified as a way to improve safety and vehicle reliability. Ultimately, however, this limited farmers’ ability to maintain their equipment themselves and to piece together cost-optimized solutions tailored to their specific needs using components from competing solution providers.
Today, all of this is changing. Hardware costs are down dramatically due, largely, to economies of scale unleashed by the Internet of Things’ explosive growth. Farmers now have access to affordable, user-friendly aftermarket solutions to upgrade tractors and other agricultural machines they already own that depend on a new generation of more cost-effective GNSS correction services. OEMs are introducing advanced functionality in their entry- to mid-range tractors in addition to their premium product line.
At the same time, the abundance of open-source projects, module-based solutions, and pre-certified radio technologies are making the development of precision ag solutions cheaper, bringing down the cost of off-the-shelf hardware. Add to that lower subscription costs for GNSS correction services thanks to improved broadcast distribution with SSR-RTK (state space representation-real-time kinematic).
The total cost of connectivity is dropping as well. Deploying connectivity infrastructure was long a non-negligible cost point, made up of wireless infrastructure and data subscription fees. Today, thanks to the increased availability of cost- and power-optimized wireless communication technologies with broader coverage (LTE-M, NB-IoT, LTE Cat 1), farmers can reap the benefits of the overall expansion of cellular network infrastructure.
Arguably one of the most promising trends driving the democratization of precision agriculture technology comes from the farming community itself in the form of do-it-yourself solutions based on open-source hardware and software designs.
Take AgOpenGPS, also referred to as AOG, an open-source auto-steering solution created by a Canadian farmer and software developer. AOG delivers all the hardware design files, the real-time microcontroller firmware, and software required to enable auto-steering on conventional tractors, regardless of their age. Thousands of hours invested by the AOG developer community have made the solution accessible to the masses, both financially — retrofitting tractors can cost less than USD $1,000 — and in terms of prerequisite knowledge.
A growing variety of precision agriculture platforms, from high-end commercial solutions that cater to the most profitable farms to low-cost do-it-yourself solutions that can pay for themselves in a year and are accessible to smaller, less profitable operations, are transforming the impact that precision agriculture can deliver. With the global food supply under tremendous pressure, this democratization of smart farming technology could come to play an important role in feeding the world.
To learn more about how u-blox enables high-precision autonomous vehicles and other smart farming applications, visit www.u-blox.com/precision-agriculture.