The new autopilot is engineered to provide reliable GNSS‑denied navigation and fully autonomous mission execution, including complex operational scenarios and seamless interoperability.
UAV Navigation — a division of Grupo Oesía specializing in advanced guidance, navigation and control solutions for unmanned vehicles — has launched the Vector-300high‑performance autopilot.
Vector-300 is designed to meet the industrial and operational requirements of mass‑produced, attritable unmanned aerial systems, with a clear focus on loitering munition and Counter-UAS (C-UAS) interceptor applications.
Vector‑300 has been engineered to combine advanced autonomous guidance, navigation and control (GNC) capabilities with scalability and manufacturability. Its architecture is designed to reduce technical complexity and enable agile, large‑scale production while ensuring consistent and reliable performance across high‑volume deployments.
Designed for high‑dynamic interception and terminal missions, Vector‑300 delivers strike‑to‑target precision guidance with bull’s eye accuracy. The autopilot supports the integration of AI‑based target identification and optical data directly into its autonomous GNC loops, enabling advanced engagement of both static and dynamic targets. This architecture supports real‑time trajectory adaptation during pursuit and terminal engagement phases, making Vector‑300 suitable for demanding loitering munition and C-UAS interceptor operations.
Vector‑300 is designed to operate in highly contested and GNSS‑denied environments, even under electronic warfare (EW) jamming, spoofing and meaconing. Its robust navigation core relies on advanced inertial algorithms and multisensor fusion to ensure mission continuity across all phases of operation and can be easily complemented with UAV Navigation–Grupo Oesía proprietary solutions such as the Visual Navigation System to enhance dead‑reckoning accuracy.
Building on the battlefield-proven capabilities of the Vectorautopilot family, Vector‑300 enables the full range of advanced operations already established across UAV Navigation–Grupo Oesía solutions. These include
fully autonomous mission execution
swarming and formation flight
4D trajectory management to reach targets at a predefined time
high‑dynamic maneuvers
manned‑unmanned teaming (MUT) operations
many other advanced autonomous capabilities.
Its open and modular architecture is designed to ensure interoperability with third‑party platforms, payloads and sensors through seamless integration with Vector‑MCC. This architecture also enables the integration of autonomous decision‑making software, allowing platforms equipped with Vector‑300 to adapt to evolving concepts of operation and advanced autonomy requirements.
An independent study conducted by UAV Navigation has defined the operational envelope of the VECTOR-600 autopilot based on the Specific Operations Risk Assessment (SORA) methodology. The operational envelope defines the operational risk profile within which an aircraft can operate safely, taking into consideration all risk mitigations included within the system.
The SORA methodology evaluates the safety risks involved with the operation of an unmanned aerial system (UAS) of any class, size or type of operation. The concept of operation (ConOps) is normally used as the input for this analysis; the output takes the form of the Specific Assurance and Integrity Level (SAIL) for a particular operation, which indicates the level of robustness that must be demonstrated for the operational safety objectives.
In this case, instead of performing a conventional SORA analysis from the ConOps to the SAIL output, this study was performed the other way around because the objective of the study was to identify the operational envelope of the sytem.
EUROCAE ED-280, the guidelines for UAS safety and analysis for specific categories of low and medium levels of robustness, recommends to any operator a detailed definition of different mission and platform points: the ConOps, the entire UAS architecture including functions, systems, and implementation, identification and classification of failure conditions; verification that safety objectives are fulfilled and a complete probable failure analysis using FMEA-like techniques and Fault Tree Analysis (FTA).
UAV Navigation prepared an FMECA and FTA analysis performed by a third-party and independent company on the VECTOR-600 autopilot and its onboard sensor suite, the POLAR-300. The study concluded that within the operational envelope of the VECTOR-600, any failure – however remote the probability – is highly unlikely to result in a catastrophic outcome, such as the loss of the aircraft. The conclusions reached indicate that the system is perfectly suited for VLOS/BVLOS operations – including appropriate restrictions where applicable. The system has proved its robustness and suitability for safe operations over a wide range of missions usually performed by professional UAS.
The analysis is available on request to all clients interested. Contact UAV Navigation for more information.
A roundup of recent products in the GNSS and inertial positioning industry from the June 2022 issue of GPS World magazine.
SURVEYING & MAPPING
Base/Rover
For survey-grade GNSS accuracy anywhere
Photo: Bad Elf
A base/rover feature built upon the Flex GNSS receiver brings affordable centimeter-level accuracy to surveyors and geospatial professionals working anywhere in the world. The solution consists of two Flex GNSS receivers and two UHF radios, allowing customers to perform high-accuracy field data collection in areas where traditional real-time kinematic (RTK) corrections or cellular coverage is not available. Existing Flex customers can upgrade by adding Flex radio kits (pictured). The Bad Elf Flex enables data collection either as a standalone receiver or paired with apps on iOS or Android phones and tablets.
The Leica Pegasus TRK reality-capture mobile-mapping system features artificial intelligence (AI), autonomous workflows and intuitive interfaces. To comply with privacy regulations, its AI can identify and blur identifiers, such as people and vehicles, in real time. Features include advanced dynamic laser scanning and an expandable imagery system for recording, measuring and visualizing. It enables long-range mobile mapping for asset management, road construction, rail, critical infrastructure, utilities and more. The system also can create high-definition basemaps for autonomous vehicles.
The True View 645/650 is the latest 3D Imaging System (3DIS) from GeoCue. Combined with the True View EVO data-processing software suite, it includes the full post-processing software workflow and directly integrates with Applanix POSPac. EVO supports the creation of project deliverables including ground classified point clouds, surface models, contours, digital elevation models (DEMs), volumetric analysis and wire extraction. The system delivers colorized lidar deliverables with accuracy better than 3 cm root-mean-square-error (RMSE) for the True View 645, and better than 2 cm for the True View 650.
The Eagle-2 works with software-defined receivers in real time or records GNSS signals for post-processing. For post-processing, Eagle-2 supports most third-party receivers, such as MATLAB and C/C++ receivers. The front end allows a user to work with two perfectly synchronized channels connected to two antennas. The Eagle-2 supports GPS, Galileo, GLONASS , BeiDou, QZSS and SBAS.
The housed HC885XF and embedded HC885EXF dual-band eXtended Filtering (XF) antennas receive GPS/QZSS L1/L5, GLONASS G1/G3, Galileo E1/ E5a/b, BeiDou B1/B2/B2a and L-band corrections services. They have been tuned to provide optimal support for the entire L1/G1/E1/B1/L-band correction and L5/G3/E5/B2 bands. The housed version, HC885XF, weighs ~42 g and is enclosed in a robust, military-grade IP67 plastic enclosure. The embedded version, HC885EXF, weighs ~8 g and is easily mounted with an embedded helical mounting ring.
Sets performance benchmarks for harsh environments
Photo: Analog Devices
The AD9213S-CSH is a highly integrated RF analog-to-digital converter that handles 12-bit, 10.25-giga-samples per second. It is the company’s fastest ADC available for the space environment. The AD9213-CSH enables the next generation of software-defined systems for satellite communications, radar and remote sensing. The high sample rate and integrated post-processing enable further performance gains for narrow-band applications.
Skyward has published a free ebook, Adding Drones to the Enterprise, to provide guidance on establishing a corporate drone program. According to Skyward, the most efficient and effective drone programs are the lowest risk and most compliant. Topics covered include how to present the business value of a drone operation to corporate executives; how risk managers can optimize the workflow to ensure maximum safety; best practices for risk mitigation and regulatory compliance; tips for collaborating with legal and compliance teams on a general operating manual; and how to provide full transparency to corporate stakeholders.
DJI’s all-in-one solution for professional drone operators includes the DJI Matrice 30 (M30) drone integrated with DJI FlightHub 2 fleet-management cloud software and DJI Dock for autonomous docking and recharging. The integrated solution is suitable for Enterprise drone users such as public safety agencies, infrastructure inspectors and energy operators. The M30 model is designed for rugged professional uses, while the fact that it fits in a backpack makes transportation and setup fast. The DJI Dock is an autonomous takeoff, landing and charging station allowing fully automatic, programmed flights with the DJI M30 Series (Dock Version). After setup, the fully charged M30 drone can take off from the dock through FlightHub 2 programmed automatic missions anywhere within a seven-kilometer radius.
The AlphaAir 1400 (AA1400) and AlphaAir 2400 (AA2400) lidar systems are lightweight, compact airborne scanners easily installed on various UAV platforms or small survey aircraft and helicopters. They are adapted to high-density point-corridor mapping applications, day or night, under leaf-on and leaf-off conditions or with dense vegetation to provide reliable results. Combined with industrial-grade GNSS receivers and high-precision inertial measurement units (IMUs), the AA1400 and AA2400 provide 2 cm to 5 cm survey-grade accuracy. They also integrate Riegl VUX lidars with waveform-lidar technology, allowing echo digitization and online waveform processing.
The VECTOR-600 is a robust, dependable autopilot with built-in physical and logical redundancy, allowing it to survive all individual sensor failures while maintaining accurate estimates of attitude and position. It works for fixed-wing, rotary-wing and vertical-take-off-and-landing UAVs. It provides exceptional performance in GNSS-denied environments and when there is a jamming threat. The VECTOR-600 features high quality components and an electromagnetic-resistant design tested to MIL-STD 461.
Casia G is a ground-based detect-and-avoid surveillance solution that provides 360° optical detection with alerts. It enables operators to avoid both cooperative and non-cooperative aircraft for safe beyond-visual-line-of-sight (BVLOS) flight. Casia G creates a perimeter of monitored airspace for UAVs to perform work safely, without additional payload. It is suitable for operations in fixed or temporary locations, supporting drone-in-the-box operations and augmenting or replacing human visual observers. Casia G sees the entire sky, with uniform probability and resolution, 10 times per second, covering a majority of small UAS use cases.
UAV Navigation has confirmed the safety and reliability of its Vector-600 autopilot for civil applications with an independent study. The study was performed as part of the European Union VaNeT project, and conducted by third-party company Anzen Engineering.
An autopilot system in an unmanned aerial vehicle (UAV) is the heart of the flight control system. For the Vector-600, the study included a reliability prediction report (RPR), failure mode effects and criticality analysis (FMECA) and fault tree analysis (FTA).
Reliability Prediction Report. The RPR analyzes probability of failure of every single sensor and component inside a system. It helps define component failure rates and, consequently, a prediction of the time that the VECTOR-600 is expected to operate free of failures under given operating conditions. According to this, the VECTOR-600 has shown a mean time between failures of more than 19,500 hours.
Failure Mode Effects and Criticality Analysis. A FMECA study identifies potential failures of system functions and assesses their effects, so that mitigation actions can be defined. It is a bottom-up analysis considering each single elementary failure mode and assessing its effects.
Fault Tree Analysis. Fault trees are a classic deductive analysis technique useful for both qualitative and quantitative analysis. For the Vector-600, a quantitative FTA provided probability estimates for major hazards, as well as identifying single-point failure modes and guiding further design for hazard reduction. According to the results, Vector-600 showed a probability of loss of mission per flight hour of 1,809E-05 under its operating conditions.
“The FMECA, RPR, and FTA analysis performed by the external and independent company Anzen have proven that our most advanced autopilot, Vector-600, is one of the most reliable GNC [guidance, navigation and control] systems for NATO Class I and II unmanned aircrafts available in the market and enables our clients to execute missions ensuring safety,” UAV Navigation stated in a press release.
The EU regulation framework defines three classes of operations: open, specific and certified. In specific and certified category operations, including most professional UAS flights, operators and aircraft manufacturers need to prove safe operation of their platforms. For this reason, the study of the reliability of the systems involved in the UAV becomes a must to demonstrate the system can operate free of failures under specific operational conditions.
Controlling weeds is a natural challenge in agriculture. The cost of controlling these unwanted plants is also one of the most expensive line items in a farmer’s budget. For third-generation Brazilian farmer Ivan Bedin, trying to rid his 8,620-hectare soybean and corn farm of hearty weeds has been a costly challenge.
“Typically, we’ve had to blanket spray weed-killing chemicals throughout the entire farm,” Bedin said. “Even if only 15% or 20% of the area was weed-infested, we had to spray the total area. We were spending more than $145,000 a year on chemicals, and it wasn’t good for the environment.”
The Bedin family then acquired Trimble’s WeedSeeker 2 technology. This intelligent spot-spray system senses whether a weed is present and signals a spray nozzle to deliver a precise amount of chemical, spraying only the weed. By targeting resistant weeds individually, WeedSeeker 2 can reduce the amount of herbicides used by up to 90%, promoting sustainability and cost savings on the farm.
While driving 18–20 km/hr, the sprayer’s operator focuses on the WeedSeeker application while the AutoPilot system guides the sprayer. As he drives between crop rows, optical sensors distinguish the green of the crop from the green weed and release herbicide just on the weed. From inside the cab, the operator can monitor the spray system and adjust any application parameters in real time. With the reliability of the steering technology and the efficiency of WeedSeeker, Bedin has been able to reduce refueling time and cover his entire field 30% faster than with his conventional system.
Most importantly, the technology has significantly slashed his weed-chemical expense. “WeedSeeker 2 has yielded us nearly 90% savings in herbicide costs,” said Bedin. “Now we only need to spray between 10% to 30% of the farm — where the weeds actually grow — which equals a savings of about $70,000 for each 1,000 hectares sprayed. Additionally, because we use less herbicide, we impact the environment less.”
Because the spot-spray system logs and maps every weed sprayed, Bedin can also see in real time where there are weed infestations and review the detailed maps before the next spray. With the “seek and destroy” premise of WeedSeeker 2, Bedin’s formidable weeds may have finally met their match.
In June 2019, Regulus Cyber’s experts successfully spoofed the GPS-based navigation system of a Tesla Model 3 vehicle. This experiment provided an important warning for all companies using GNSS location and timing: these technologies, on which they depend, are highly vulnerable to spoofing attacks. In the two years since the experiment, companies and governments have continued to research the potential harm that can be caused by spoofing attacks and are learning more about how to defend themselves from them.
The Tesla experiment was groundbreaking because it was the first time that a level 2.5 autonomous vehicle was exposed to a sophisticated GPS spoofing attack and its behavior recorded.
We chose Tesla’s Model 3 because it had the most sophisticated advanced driver assistance system (ADAS) at the time, called Navigate on Autopilot (abbreviated NOA or Autopilot), which uses GPS to make several driving decisions. However, this experiment exposed several cybersecurity issues potentially affecting all vehicles relying on GPS as part of their sensor fusion for autonomous decision making.
NOA makes lane changes and takes interchange exits once a destination is determined, without requiring any confirmation by the driver. Its several other features include autonomous deceleration and acceleration according to the speed limit, autonomous lane changing, and adaptive cruise control.
These features use a variety of sensors, including cameras, radar, speedometers and more. The researchers wanted to test the extent to which the Model 3 relied on its GNSS receiver to make these driving decisions and how it behaved when receiving contradicting information from its GNSS receiver and its other sensors.
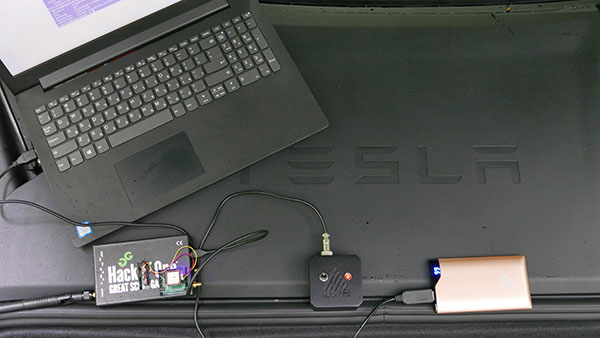
The researchers used hardware and software purchased online to mimic the tools potential hackers would use. The experiment involved two software-defined radio (SDR) devices purchased online, one to spoof GPS and one to jam all other constellations, connected to an external antenna to simulate an external attack. The software used to simulate the GPS signal was downloaded from an online source, available for free.
The test included three scenarios the researchers assumed would involve usage of GNSS, each one using a different spoofing pattern:
Scenario 1. Exiting the highway at the wrong location
Scenario 2. Enforcing an incorrect speed limit
Scenario 3. Turning into incoming traffic
A Tesla Model 3 was remotely hacked in a test of a GPS spoofing attack. (Photo: Regulus Cyber)
Scenario 1: Exiting the Highway at the Wrong Location
The car was driving normally at a constant speed of 95 KPH with NOA enabled. The destination determined for this ride was a town nearby and the car designated a certain interchange as the destination for an autonomous exit maneuver. The experiment began 2.5 km before the vehicle reached that interchange; however, the researchers’ fake GPS signal resulted in coordinates of a location on the same highway but only 150 m before the exit.
As soon as its GNSS receiver was spoofed, the car assumed that it had reached the correct exit and began to maneuver to the right, activating the blinker, slowing down, turning the wheel, and crossing a dotted white line to its right side, exiting to an emergency pit-stop, confusing it with the exit 2.5 km ahead.
To be clear, this would not have happened at any location along the highway, because sensor fusion with the radar and the camera enables the car to avoid physical obstacles and ensures that it does not cross a solid white line that makes a turn illegal.
The spoofing attack succeeded, in that it enabled the attacker to remotely manipulate the car’s sensor fusion and make it exit the highway at the wrong location.
Scenario 2: Enforcing an Incorrect Speed Limit
The car was driving to a random city far away on a highway, at a constant speed of 90 KPH, which was 10 KPH below the highway’s speed limit, with NOA enabled. The researchers generated a fake GPS signal, with the coordinates of a nearby town road that has a speed limit of 33 KPH. Shortly thereafter, the vehicle assumed the speed limit had just changed to 33 KPH and instantly began decelerating. Each time the driver attempted to accelerate using the gas pedal, as soon as he lifted his foot off the pedal the car engaged in heavy braking to quickly decelerate back to 33 KPH.
To be clear, this would not have happened if NOA had been turned off. The cruise mode can be disabled by either using the touch screen or by pressing the brakes, which would allow the driver to regain full manual control over the vehicle’s speed.
Again, the spoofing attack succeeded, in that it allowed the attacker to remotely manipulate the car’s speed and made it enforce a speed limit much lower than the actual one on the highway.
Scenario 3: Turning into Incoming Traffic
The car was being driven manually on a two-lane road with one lane in each direction, the type of road on which NOA cannot be used. The researchers generated a fake GPS signal, with coordinates of a nearby three-lane highway, with all lanes in the same direction. Furthermore, the spoofed location was 150 m from a designated exit that the vehicle’s navigation system was programmed to take, requiring a left turn.
Shortly after the car’s GNSS receiver was spoofed, the vehicle assumed it was on a highway and engaged NOA. Next, it triggered the exit maneuver, which began with activating the left blinker, followed by turning the wheel to the left. The driver had to quickly grab the wheel and manually drive the car back to its lane to avoid a collision with oncoming traffic.
To be clear, this kind of scenario would not be possible without the driver enabling the NOA. Once a Tesla driver enables NOA, it automatically turns on once the vehicle is on the highway with a set destination. This is why the researchers assumed that NOA would be turned on by default, and as long as NOA is activated, the vehicle is susceptible to the attacks mentioned in the experiment.
Once again, the spoofing attack was successful in that it enabled the attacker to remotely steer the vehicle into the opposing lane, placing it on a direct collision course with oncoming traffic. Out of the three scenarios described, this one proved that GNSS spoofing can endanger lives.
The hardware used for the GPS spoofing test. (Photo: Regulus Cyber)
GPS Cybersecurity for Automotive Applications
The NOA system in the Tesla Model 3, being an ADAS, allows drivers to rely on the car and its sensors for basic driving functions. Therefore, it enables drivers to briefly take their hands off the wheel and reduces the number of actions they are required to take. Nevertheless, drivers are still required to be fully attentive to the road so that they can take control of the vehicle at any time.
However, since this spoofing attack had such a sudden and instant impact on the car’s driving behavior, a driver who is not fully attentive and aware would not be prepared to quickly take control and prevent an accident. By the time the driver notices that something is wrong and reacts, it might be too late to prevent an accident. Already drivers have been found sleeping at the wheel, driving under the influence of alcohol, and doing other inappropriate tasks with NOA engaged.
Furthermore, this situation assumes a level 2.5 autonomous vehicle as was tested. But what happens in level 3 vehicles, in which driver engagement is limited, or level 4 and 5, in which driver response is non-existent? This research provides us with a glimpse into the crucial importance of sensor cybersecurity and particularly of GNSS cybersecurity.
The Tesla hack experiment and its results were eye-opening for the autonomous vehicles sector – the danger is real and rising as more and more vehicles are depending on GNSS technology as part of their sensors for assisted or automated driving. Up to 97% of new vehicles since 2019 incorporate GNSS receivers and most if not all are still vulnerable to the same spoofing attacks presented in this research.
In January 2021, the UN’s World Forum for Harmonization of Vehicle Regulations (WP.29) issued Regulation No. 155, which sets guidelines for cybersecurity in the automotive industry with the goal of addressing every possible cyber threat that it might encounter. Annex 5 of the regulation defines cyber attacks and states that in order to get approvals in the future vehicle manufacturers will need to provide solid evidence that their vehicles are sufficiently protected against them.
Among the cyber threats mentioned in the Annex is spoofing of data received by the vehicle — both sybil spoofing attacks and spoofing of messages. The Annex also lists the appropriate protection that vehicle manufacturers should implement and states that vehicle manufacturers will be required to provide evidence of the effectiveness of the mitigation measures they choose. These upcoming regulatory requirements can make the difference between life and death in situations caused by GNSS spoofing and ensure that only reliable and resilient positioning is used within vehicles, both today and in the future.
Please note: Tesla released a statement saying that it is “taking steps to introduce safeguards in the future which we believe will make our products more secure against these kinds of attacks.” Regulus Cyber researchers did not perform any further experiments with Tesla Model 3 since this research was published two years ago.
See the Tesla GPS spoofing experiment from the driver’s point of view:
UAV Navigation has launched the VECTOR-400, a compact autopilot designed specifically for unmanned aerial targets (UAT). It features a robust enclosure and a military-grade connector designed to withstand the harshest environments, in accordance with MIL-STD 810 and MIL-STD 461.
“We wanted to develop a solution specifically for manufacturers of aerial targets,” said Tobias Webster, managing director of UAV Navigation. “That is why it was important for the autopilot to have the features required by this kind of UAV, such as sea-skimming (extremely low-level flight) or the capability to navigate without a GNSS signal.”
Thanks to its physical and logical redundancy, the VECTOR-400 is able to continue a mission in case of individual sensor failure and even when subject to jamming, maintaining accurate estimations of attitude and position. It features advanced algorithms for stall prevention and the ability to carry out an efficient gliding maneuver in case of engine failure.
The VECTOR-400 uses an air data attitude and heading reference system (ADAHRS) and inertial navigation system (INS) developed by UAV Navigation, which provides high precision attitude information and which allows reliable navigation even under the most demanding circumstances.
The ADAHRS gives the VECTOR-400 the capability to operate in GNSS-denied environments (less than 30 m/min drift) and also to execute highly dynamic maneuvers.
“The VECTOR-400 is not a product in isolation, rather it forms part of our global strategy. Some of its main features, such as the execution of completely automatic functions or its compact and easy to integrate software, which also allow it to be operated in case of data-link failure, are already used in other products in our autopilot family, such as the VECTOR-600” explained Webster.
In addition to its advanced technology, the VECTOR-400 benefits from the same stringent quality standards that UAV Navigation insists upon for all of its products. The company carries out rigorous calibration processes and acceptance testing on every single unit before it ships, together with its individual certificate of conformity.
UAV Navigation has designed the VECTOR-400 to meet MIL-STD 810 and MIL-STD 461 standards. The design and development of its software and hardware has been carried out in accordance with DO-178C, DO-254 and also ASTM F3201-16 — a certification available for unmanned aerial systems.
“Not all autopilots are able to control highly dynamic platforms; even fewer are able to carry out advanced, high-speed maneuvers and low-level flight such as sea-skimming,” Webster said. “That is why we are extremely pleased with this new product, which we believe meets a requirement in the market that had yet to be covered.”
UAVOS company is collaborating with King Abdulaziz City for Science and Technology (KACST), Saudi Arabia, on scientific research and development of a new Flight Control System (FCS). The FCS is designed to fit and leverage multi-mission, multi-domain UAV platforms.
Together, the research and development (R&D) partners have created a Saker-1B Medium Altitude Long Endurance (MALE) UAS (unmanned aerial system). The specifications of the UAV system has been confirmed by more than 500 hours of day and night test missions under various weather conditions.
A total of 1,000 hours of take-off and landing test missions were successfully performed, with the long-endurance flights lasting up to 19 hours. The UAV is equipped with a satellite communication data link for beyond-visual-line-of-sight (BVLOS) operation.
Watch the Saker-1B in action:
UAVOS and KACST have been jointly developing Flight Control System capability for UAS for 10 years. R&D partners have completed performing the flight tests of their UAS in Saudi Arabia to verify easy and fully autonomous online and offline operation of the unmanned aircraft from takeoff to landing.
These test missions followed various other successful operational exercises performed in the last few months. The Saker-1B MALE UAS has been proven to operate in harsh desert with long-endurance, high-altitude and high-speed flights. High performance of satellite data link for command and control was demonstrated.
Due to availability of the current UAVOS autopilot technology, the UAS received sustainability to jamming attacks and advanced data security.
The Saker-1B performed a series of heavy weight landing tests with the maximum weight (MTOW) 2,500 pounds (1,100 kilograms). A number of different payloads were tested in surveillance experimental missions to confirm overall system performance and its readiness for real applications.
The UAS uses a direct radio link when flying within line of sight, switching seamlessly to a satellite link when flying BVLOS.
The Saker-1B MALE is an advanced unmanned aerial system with fully autonomous operation capability. It is equipped with automatic taxi-takeoff and landing systems, satellite communication for extended range, and fully redundant avionics.
The UAV is designed to operate in harsh environments and is adapted to perform in an extremely hostile, dry and dusty ambient air. The UAS is capable of flying for more than 19 hours at an altitude of up to 16,500 feet (5000 м) with a range 1600 miles (2600 km).
“We’re excited to work with KACST, a world-class organization in science and technology, fostering innovation and promoting a knowledge-based society in the Kingdom of Saudi Arabia,” said UAVOS CEO and Lead Developer Aliaksei Stratsilatau. “Our ultimate goal of the scientific research and development partnership is to make UAV technologies, which can turn vision into the UAV of tomorrow. For 10 years in partnering with KACST, we hold to a singular and enduring mission: to make breakthrough technologies for the unmanned system industry,”Aliaksei Stratsilatau added.
“As of today [Nov. 28] Tesla owners have driven 1 billion miles with Autopilot engaged,” the company announced via tweet.
The Autopilot feature became available in 2015 and now comes on all new Tesla models with a $5,000 activation fee at the time of purchase or $7,000 if selected later.
The company is training its “neural networks” to improve its self-driving system.
Photo: Tesla
Tesla’s global fleet totals more than half a million vehicles, and recently marked a 20-billion mile step of total electric miles driven, the company said.
The Autopilot system can also function in the background of the vehicle, without being activated and with no input on control. Thus it gathers data from many more billions of “drivered” miles about its environment and potential Autopilot behavior.
The company previously mentioned the 1 billion-mile autonomous mark as the minimum it would need to move Autosteer from beta to a regular feature.
Updates to Autopilot are planned for 2019, including new hardware that will aid in the rollout of the company’s Full Self-Driving system, possibly by the end of that year.
MicroPilot Inc. has teamed with Trimble to integrate high-precision GNSS technology as part of its autopilot for guidance and control of unmanned aerial vehicles (UAVs).
With centimeter-level, real-time kinematic (RTK) positioning capabilities, Trimble’s multi-constellation GNSS receivers are capable of tracking signals from GPS, GLONASS, Galileo and BeiDou, the company said. Trimble GNSS receivers are used in a wide variety of applications ranging from port automation and robotics to autonomous vehicle guidance.
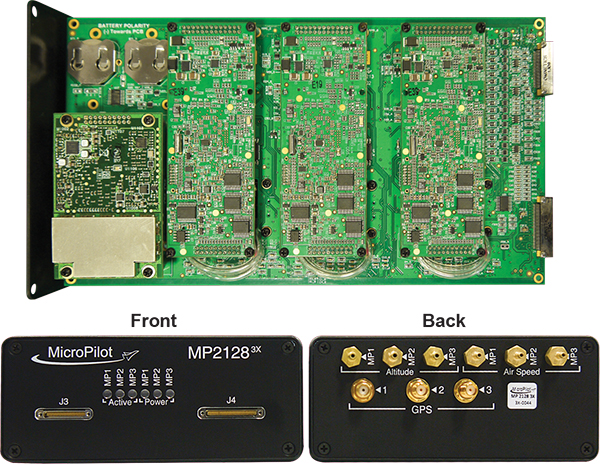
MicroPilot develops and manufactures autopilots for UAVs, including the triple-redundant MP21283X. The company also provides support products that enable customers to use their development time as efficiently as possible and bring their products to market faster. These products include the trueHWIL2 UAV autopilot simulator and the XTENDERmp software development kit.
The MP21283X UAV autopilot. (Image: Micropilot)
Working closely with Trimble gives MicroPilot the ability to better leverage Trimble’s GNSS technologies. This access improves the ability of MicroPilot’s support team to assist customers with their product development, testing and operations. Trimble will benefit from MicroPilot’s extensive experience integrating guidance, navigation and control systems for a wide variety of UAV platforms, the companies said.
“Reliable, robust and innovative GNSS solutions as well as strong technical support is key to bringing any UAV to market and our relationship with Trimble will allow MicroPilot to improve on our already industry-leading support,” said MicroPilot president Howard Loewen.
“We are very pleased to be working closely with MicroPilot to provide high-precision GNSS for its UAV autopilot solutions,” said Joseph Carey, director of strategic initiatives for Trimble’s Integrated Technologies Division. “MicroPilot autopilot’s simple installation, configuration and customization capabilities allow UAV manufacturers to easily integrate reliable, state-of-the-art, professional guidance, navigation and controls to their aerial platforms.”
Tersus GNSS Inc. has released a new AutoSteer autopilot for agricultural machinery.
The AG960 AutoSteer System is designed to accelerate the application of autopilot for precision agricultural machinery and enhance and optimize operational accuracy and productivity for modern farmers.
By integrating high-precision real-time kinematic (RTK) receiver and software, the AG960 enables agricultural machines to operate in accordance with a pre-set planning path. Using precise GNSS guidance, the hydraulic system of the agricultural machinery is steered by the vehicle controller.
Agricultural machines can operate aligned with the set route automatically, while graphical detailsare displayed on the vehicle display panel. The system is easy to use and applicable for each working cycle of agriculture, such as soil tillage, plowing, building of ditches and ridges, seeding, spraying and harvesting.
Tersus plans to launch a series of solutions that meet the requirements of different farming machines. The AG960 was first commercially deployed in China, and will be rolled out in other regions around the world.
In October 2014, Tesla started equipping its Model S with hardware to allow for the incremental introduction of self-driving technology: a forward radar, a forward-looking camera, 12 long-range ultrasonic sensors positioned to sense 16 feet around the car in every direction at all speeds, and a high-precision digitally controlled electric assist braking system.
Version 7.0 of Tesla’s software has now been released with Autopilot, which allows those tools to deliver a range of new features designed to work in conjunction with the automated driving capabilities already offered in Model S.
Tesla calls Autopilot a major step toward autonomous driving. “Tesla Autopilot relieves drivers of the most tedious and potentially dangerous aspects of road travel,” according to a Tesla blog. “While truly driverless cars are still a few years away, Tesla Autopilot functions like the systems that airplane pilots use when conditions are clear. The driver is still responsible for, and ultimately in control of, the car. What’s more, you always have intuitive access to the information your car is using to inform its actions.”
The combined suite of features represents an integrated autopilot system involving four different feedback modules: camera, radar, ultrasonics and GPS. “These mutually reinforcing systems offer real-time data feedback from the Tesla fleet, ensuring that the system is continually learning and improving upon itself,” the Tesla blog said.
Autopilot allows Model S to steer within a lane, change lanes with the tap of a turn signal, and manage speed by using active, traffic-aware cruise control. Digital control of motors, brakes and steering helps avoid collisions from the front and sides, as well as prevent the car from wandering off the road. “Your car can also scan for a parking space, alert you when one is available, and parallel park on command,” Tesla said.
Release of version 7.0 also features a significant visual refresh of the digital display. The instrument panel is focused on the driver and includes more functional apps to help monitor the ride.
Tesla founder Elon Musk said during a press conference that drivers should exercise caution in the initial months of the rollout, and consider Version 7.0 a beta release. “We’re advising drivers to keep their hands on the wheel at this early stage,” Musk said. The car’s dash alerts drivers when they need to take the wheel.
Just days after the launch, videos began appearing on the Internet showing near misses and other errors.