ComNav Technology has announced major upgrades to its T300 and T300 Plus GNSS receivers for the global market, including an upgrade to its GNSS K8 platform on both receivers and a tilt-sensor replacement for the inertial measurement unit (IMU) on the T300 Plus.
The upgraded T300 and T300 Plus provide reception of more GNSS channels and increased reliability, the company said.
More channels. The powerful full-constellation tracking ability on the K8 platform enables reception of all current and future GNSS signals, including GPS, BeiDou, GLONASS, Galileo, QZSS, NavIC and SBAS. Signal support and tracking for QZSS L1/L2/L5, Navic L5, Galileo E6 and Altboc as well as GLONASS L3 are also available. After the upgrade, T300 and T300 Plus each receive 965 GNSS channels, and offer robust GNSS tracking performance.
Improved reliability. The advanced GNSS real-time kinematic (RTK) technology on the K8 platform provides continuous centimeter-level positioning within a short period of time. To alleviate the influence on authentic satellite signals, the K8 platform enhances interference detection and mitigation. The interference, for example, between buildings or in the dense jungle, will not affect the positioning results.
With the upgrades, users can expand the reach of their GNSS rovers and obtain reliable positioning results even in complex environments.
Low power consumption. In static mode, power consumption is reduced to 1.92 W, extending working time to 16 hours and providing a smooth workflow without an external power supply.
T300 Plus tilt compensation. Combined with the inertial measurement unit (IMU), the T300 Plus can support tilt compensation up to 60° and keeps the accuracy within 2.5 centimeters, which significantly improves the fieldwork with increased efficiency, convenience and reliability without magnetometer and accelerometer calibration.
The upgraded T300 and T300 Plus GNSS receivers are available now.
SoftBank Corp., ALES Corp. and u-blox AG have signed a memorandum of understanding to cooperate in GNSS augmentation services for global markets.
SoftBank provides the “ichimill” GNSS augmentation service in Japan, its subsidiary ALES operates a business that generates and delivers positioning correction data, and u-blox is a global provider of positioning services for the automotive, industrial and consumer markets.
U-blox also provides electronic components for wireless communications and the PointPerfect GNSS augmentation service in Europe, the United States and other countries and regions.
Through this business collaboration, SoftBank, ALES and u-blox will construct GNSS augmentation infrastructure for Japan, Europe and the United States, develop GNSS receivers and devices, and expand service areas.
Collaboration Background
Since November 2019, SoftBank has been offering ichimill, a GNSS augmentation service that offers highly accurate positioning with a margin of error of a few centimeters in the Japan market. In addition to providing technology that enables the generation and delivery of correction data, ALES has been offering a centimeter-level positioning service to consumers in Japan since August 2020.
In July 2021, u-blox began providing PointPerfect, a PPP-RTK-based GNSS augmentation service, which is now available in the contiguous United States and Europe.
GNSS augmentation services like these are mainly offered separately by country and region. Client companies, which include global automotive manufacturers and agricultural machinery manufacturers, sign up for separate service contracts in each country and region, making GNSS receiver configuration more complex.
Collaboration Overview
To offer global GNSS augmentation services, SoftBank, ALES and u-blox will study the following initiatives.
Develop a global correction data delivery infrastructure. GNSS augmentation services use correction methods that differ by country and region, and there is a wide variety of correction signal formats. In 2022, the three companies will consider developing a correction data delivery infrastructure that delivers unified correction signal formats for use in any country or region. With this infrastructure, companies using ichimill or PointPerfect will be able to conduct GNSS augmentation if they are in range of both services, which will eliminate the need for separate service contracts by country or region.
Jointly develop global-compatible devices. In addition to correction data delivery, an environment that allows for the easy implementation of GNSS receivers and other devices is necessary for GNSS augmentation services. In conjunction with the launch of ichimill, SoftBank developed its own GNSS receivers and is offering them in Japan. The three companies will consider jointly developing GNSS receivers and modules that can be used globally.
Greater GNSS augmentation accuracy and service area expansion. The companies will collaborate closely to ensure that the performance of the services in all the regions covered are comparable. This is important to provide a consistent customer experience across all regions. Furthermore, the three companies plan to study service expansion into other areas, including Asia. SoftBank is promoting the deployment of non-terrestrial network (NTN) solutions that encompass satellite- and stratospheric-based telecommunication platforms to provide connectivity to the sea, the sky, developing countries and rural areas lacking internet infrastructure so everyone around the world has access to the internet. The three companies will consider the development of NTN-linked services, such as correction data delivery using small amounts of data in a way that is suitable for NTN bandwidths.
U-blox has released a firmware update for its ZED-F9R positioning module, bringing robust centimeter-level positioning to slow-moving use cases such as robotic lawnmowers, e-scooters and shared bicycles.
Based on the ZED-F9R high-precision sensor-fusion module, the u-blox ZED-F9R-02B was designed for use in autonomous and industrial applications that require simple and efficient implementation and where rapid access to highly accurate positioning data is key, even in challenging signal environments such as dense cities.
The ZED-F9R uses the u-blox F9 multi-band GNSS receiver platform to concurrently track up to four GNSS constellations. Applying real-time kinematic (RTK) techniques, the module can derive positioning data with centimeter-level accuracy.
The high-precision GNSS measurements are fused with data from the module’s inertial measurement unit (IMU), GNSS correction data, odometry information, and a vehicle dynamics model to provide high-quality positioning accuracy in situations where GNSS alone would fail. The receiver includes dynamic models for robotic lawnmowers, e-scooters and automobiles.
The ZED-F9R-02B integrates the u-blox GNSS correction data service, broadcast in the highly scalable state-space representation format, making it easier to deliver fast time-to-market precise positioning solutions.
An autonomous lawn mower trims the grass in a park in Finland. (Photo: Scharfsinn86/iStock/Getty Images Plus/Getty Images)
Robotic lawnmowers achieve further improvements in terms of their positioning accuracy from the module’s ability to calibrate its dead-reckoning system even at low speeds. The module’s highly accurate position output lets end users precisely delimit the mowing area using software rather than with boundary wires, and deploy robotic lawnmowers on complex lawn shapes while excluding trees and shrubs. Users can align each pass of the mower with the next more accurately than before, delivering a professional-looking striped lawn.
According to U-blox, combining these features allows product designers to use the module to create mowing equipment that enables “robotic mowing as a service” capable of operating in complex environments without the upfront cost and commitment of installing boundary wires.
“Our new ZED-F9R-02B high-precision module is a turnkey dead-reckoning solution that will enable designers to bring products that need dead-reckoning technology to market more quickly than if they had to implement it from scratch,” said Alex Ngi, product manager, Industrial Navigation and Robotics, Product Center Positioning at u-blox. “It will also allow companies working in niche markets to employ dead-reckoning technologies without needing to build and maintain expertise in the subject.”
The ZED-F9R-02B offers support for a range of correction services, including the SPARTN format, which will make it straightforward to distribute GNSS correction data over large geographical areas.
iGPSPort cycling computer. In another announcement, U-blox and iGPSPORT, a sports hardware and data service provider operating out of Wuhan, China, have announced the iGS320 cycling computer, which builds on the u-blox M10 positioning platform. The cycling computer leverages the U-blox M10 platform’s ultra-low power consumption, compact size, and its ability to track all four GNSS to offer endurance athletes a superior user experience.
Adopting the U-blox M10 positioning platform in its iGS320 cycling computer brought iGPSPORT an 80 percent increase the power autonomy to deliver 72 hours of continuous tracking, up from 40 hours in their previous solution. Concurrent reception of up to four GNSS constellations increases coverage and accuracy in otherwise challenging signal environments.
U-blox is partnering with ArduSimple, a Spanish company seeking to facilitate the adoption of centimeter-level GNSS technology for mass-market applications.
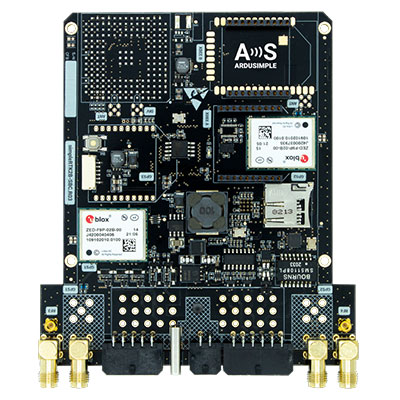
The companies partnered to develop the SimpleRTK2B single-board computer (SBC). The device, which is built around up to three u-blox ZED-F9P high-precision GNSS receivers, simplifies the development of centimeter-level positioning solutions supporting real-time kinematics (RTK), making the technology accessible to broader audiences.
The SimpleRTK2B-SBC was developed to make RTK technology as close to plug-and-play as possible. In addition to working as a stand-alone solution, customers can program their own applications with the company’s microPython API.
The SimpleRTK2B-SBC delivers mechanical integration with centimeter position on three axes (heading, pitch and roll), outputting on NMEA, RTCM, RS232 and CANBus interfaces via Ethernet, Bluetooth, Wi-Fi and 2G/3G/4G communication. It offers configurable input/output and an inertial measurement unit.
Centimeter-level positioning and high-accuracy orientation of machinery enable automation of many construction, mining and farming tasks, and take them one step closer to being performed by autonomous machines. Machine control increases jobsite safety, operational efficiency and productivity.
Using data from GNSS satellites, total stations and 3D models, machine-control hardware and software solutions determine a machine’s current position on the Earth and compare it with the desired design surface, mining task or cultivation technique. They also monitor and sometimes control the position and orientation of implements — such as blades, buckets and seeders — with respect to the machine. By talking directly to the machine’s hydraulics, machine automation shifts responsibility for accuracy and speed from the operator to the technology.
On construction sites, automation guides motor graders, excavators, dozers and other heavy machines, making operations easier to manage. This makes contractors more productive and experienced operators more efficient. With this technology, less experienced operators are able to take on more complex tasks, and all operators become more accurate. Machine automation also increases the capabilities of the machines themselves, so that excavators and compact machines are now doing finish grade work once reserved for larger and more expensive dozers.
Operators in the cab and engineers and supervisors at their desks can control and monitor progress in real time, with views of the whole layout as well as specific slopes, roads, ditches and other elements, including those under water.
Using GNSS guidance to aid application of fertilizer, pesticides and herbicides saves time and money. (Photo: Septentrio)
About half of all motor graders and a third of all dozers use positioning sensors and a display to provide operators with the position of the blade with reference to the target grade. A typical machine control set-up consists of a GNSS receiver and a display (jointly referred to as a “cab kit”) and inertial measurement units (IMUs) on the blades and other implements.
From the display, the operator loads a project design, which tells the system the cut, fill and other design information it needs. The operator then chooses a lane and may choose a vertical offset, which temporarily adjusts the design grade, making it possible to accomplish the work in steps, from rough to finish grading. Operators can also record points and scan a pavement in real time as they repair it.
While used by the construction industry on earthworks equipment since the late 1990s, machine control has recently benefited from:
The increase in the number of GNSS signals available, particularly on the new L5 frequency
IMUs, which measure blade movements with respect to the machine 100 times per second, one order of magnitude more than non-IMU grade-control systems
The growing availability of continuously operating reference stations (CORS) and other GPS networks, which eliminate the need to set up a base
New mastless systems, which integrate a receiver into the top of the cab and connect it wirelessly with IMUs to orient the blade, obviating the need to install a long mast pole on the blade and connect it by cable to the receiver and improving safety, visibility and equipment durability
New interfaces designed to be as easy to use as a cell phone, shortening the operators’ learning curve.
While these developments are hastening the advent of autonomous construction, mining and farming machines, remaining barriers to this vision include hardware and software issues as well as questions of data exchange, legal liability and operator training — issues analogous to those facing the development of autonomous cars and trucks.
The DINO is a one-ton farming robot made by NAIO Technologies that operates autonomously using GNSS positioning and maps for navigation. Of the 170 NAIO farming robots currently in operation, about 30% are DINOs, which are typically used on large farms.
In 2016, NAIO and Septentrio, a manufacturer of industrial high-end GNSS technologies, began to research the integration of full GNSS solutions into NAIO’s robots.
Today, the DINO carries a Septentrio NR3, consisting of a GNSS receiver and antenna in a single housing, which provides it with RTK centimeter-level positioning accuracy. Farmers can use the NR3 to map their fields, then attach it to the DINO to guide it.
The DINO automates weeding within complex and quickly changing environments. NAIO plans to soon add seeding and fertilization to its robot’s capabilities.
To operate reliably in the narrow lanes between crops, the DINO requires an accurate GNSS receiver with strong resistance to multipath and jamming.
The safety of field hands and the protection of the crops also require the receiver to have good integrity, which is a measure of the trust that can be placed in the correctness of the information it supplies. Accuracy, robustness, and integrity are all strong suits of Septentrio’s NR3.
While the DINO mostly operates continuously, it sometimes stops to avoid animals or humans, or for other safety reasons. A major advantage of the NR3 and other sensors that NAIO is using, is that they enable the robot to perform cold-starts very rapidly and with a stable heading.
Machine control, guidance and automation defined
Using GNSS guidance to aid application of fertilizer, pesticides and herbicides saves time and money. (Photo: fotokostic/iStock/Getty Images Plus/Getty Images)
The terms machine control, machine guidance and machine automation are not interchangeable.
Machine control is a generic term that refers to the integration of positioning tools into a construction, mining or farming machine to determine its position on the Earth and relative to a desired design surface, mining task or cultivation technique.
Within machine control, machine guidancesystems display these data in the cab — assisting the machine’s operator in steering the machine and in maneuvering its implements to shape the ground, mine minerals, plant seeds or perform other related tasks — while machine automation systems directly steer the machine, achieving greater levels of precision than human operators could. The term automated machine guidance (AMG) is sometimes also used.
Japan’s Quasi-Zenith Satellite System (QZSS) CLAS received a major enhancement on Nov. 30. QZSS CLAS (centimeter-level augmentation service) is the satellite-based nationwide open PPP-RTK service in Japan, providing centimeter positioning accuracy within one minute.
With the introduction of a new, highly efficient atmospheric correction message, the number of available satellites will be increased to 17 for those using CLAS. GPS, Galileo and QZS satellites in view will be corrected by the QZS L6 signal.
“The performance is expected be improved considerably, especially in urban areas,” said Rui Hirokawa, the deputy general manager, Space Systems Department of Mitsubishi Electric Corporation, Kamakura Works, in an email to GPS World.
Compact SSR — a highly efficient RTCM-compatible open specification for PPP/PPP-RTK — is applied to QZS CLAS. Compact SSR is accepted as a PPP-RTK standard in the 3GPP LTE positioning protocol (LPP) and the mobile communication standard for LTE/5G, with plans for it to be applied to the Galileo High-Accuracy Service (HAS).
Since July 1, CLAS has been broadcasting a trial signal compliant with IS-QZSS-L6-003 using the L6D signal of QZS-3, which increases the number of augmented satellites to a maximum of 17 for more stable positioning accuracy.
On Nov. 30 (JST), the official broadcast of the augmentation information began from all four QZS satellites (QZS-1, 2, 3 and 4).
To continue using CLAS after Nov. 30, it may be necessary to update the receiver’s F/W to comply with IS-QZSS-L6-003. Please contact the manufacturer of the CLAS receiver for further information. Read more in this National Space Policy Secretariat notice.
Septentrio, a leader in high-precision GNSS positioning solutions, is offering two open-source resources for its GPS/GNSS module receivers.
The first, ROSaic, is a Robot Operating System (ROS) driver for the mosaic-X5 module as well as other Septentrio GNSS receivers.
The second project, mosaicHAT, is an open source hardware reference design combining mosaic-X5 with a Raspberry Pi single-board computer.
Both projects facilitate integration of centimeter-level reliable positioning into robotic and other machine automation applications.
Photo: Septentrio
ROSaic driver operates on ROS, a widely used programming environment within the industry as well as academics, commonly used for integrating robot technology and developing advanced robotics and autonomous systems. ROS allows data from numerous sensors to be combined allowing high levels of autonomy.
The mosaicHAT project facilitates accurate and reliable GNSS positioning for robotics and automation on a hardware level. Numerous engineers today use Raspberry Pi for prototyping and initial integrations. The mosaicHAT board is an easy way for integrators to get started with Septentrio’s mosaic-X5 GNSS module.
By plugging mosaicHAT into a compatible Raspberry Pi, users have access to high-accuracy positioning with a high update rate, ideal for machine navigation and control, the company said. The small 56×65 mm board exposes basic interfaces such as USB, serial and general-purpose communication pins. The reference design, footprint and documentation are available for easy board printing or further customization.
“We are excited about both the ROSaic driver and the mosaicHAT being part of the GitHub community and we highly appreciate the initial authors work as well as the future contributors,” said Gustavo Lopez, market access manager at Septentrio. “Both projects are available as open source, thus empowering the community to easily fit autonomous or robotic systems with highly accurate and reliable GNSS positioning technology.”
This insight column from Septentrio explains the role of GNSS corrections in precise positioning. It explores the three most popular correction methods: RTK, PPP and PPP-RTK.
Let’s say you need reliable accurate global positioning in your technology. You do some research and decide to get yourself a multi-frequency GPS/GNSS receiver. You order an evaluation kit, but how to get your receiver to deliver the high accuracy that it promises?
GNSS receivers rely on external corrections to compensate for GNSS errors to achieve decimeter- or centimeter-level accuracy as fast as possible.
Correcting GNSS errors
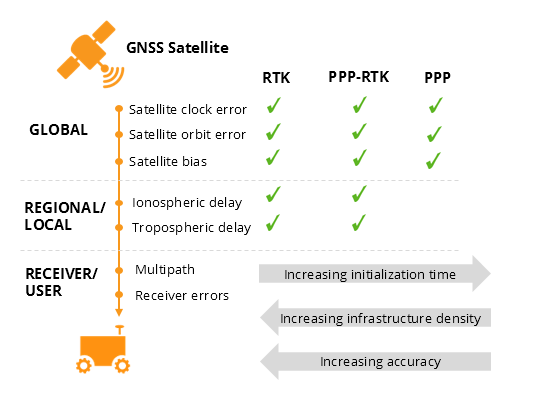
GNSS-based positioning is calculated using a method that, by itself, is limited in accuracy due to several errors caused by GNSS satellites as well as the Earth’s atmosphere.
Even the advanced clocks on board GNSS satellites experience minute drifts that cause clock errors.
The movement of GNSS satellites is predicted as they orbit the Earth. These predictions are not perfect, which results in orbit errors.
Satellite equipment introduces small signal errors, which are modeled as satellite biases.
Atmospheric errors caused by distortions and delays are experienced by the signal as it passes through the Earth’s ionosphere (outer layer) and troposphere (layer near the Earth’s surface).
The local environment around the receiver as well as the receiver itself can introduce errors. For example, satellite signals can be reflected off buildings and tall structures (multipath).
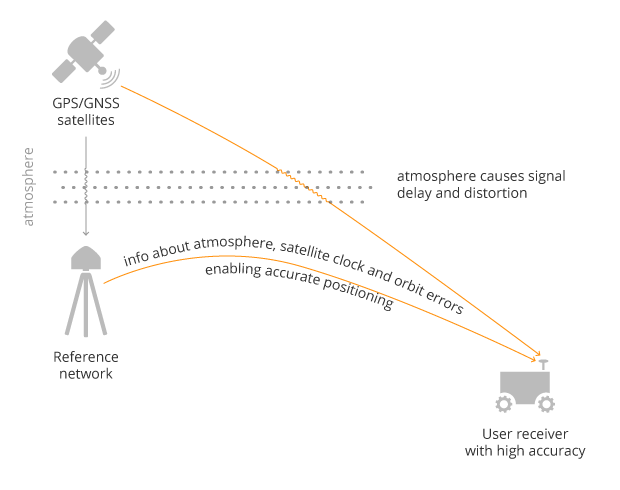
A GNSS receiver cannot correct satellite and atmospheric errors by itself; it relies on data provided by an external source. Clock and orbit errors are satellite-dependent, and so are the same around the world. Atmospheric errors, on the other hand, depend on the path the signal takes as it travels from the satellites to the user, differing depending on the receiver’s location.
To overcome both satellite and atmospheric errors, a reference station (also known as a base station) can be used. A reference station — a GNSS receiver installed at a fixed and precisely known location — estimates GNSS errors and sends them in the form of GNSS corrections to the user receiver. A reference network consists of interconnected reference receivers spread over a geographic area.
A user receiver gets data sent from a GNSS reference station to correct satellite and atmospheric errors. (Image: Septentrio)
Receiver-side errors can only be handled partially, by robust receiver technology and careful operation. Depending on which type of corrections are applied, it can take a few seconds to several minutes of initialization time for high accuracy to be achieved.
Types of corrections for high-accuracy positioning
Until recent years, RTK and PPP have been the established methods of providing GNSS corrections to user receivers. But the demand for high-accuracy positioning is on the rise, paving the way for new positioning techniques such as the hybrid PPP-RTK.
RTK: Highest level of accuracy. With the RTK (real-time kinematic) method, a user receiver gets correction data from a single base station or a local reference network. It then uses this data to eliminate most of the GNSS errors.
RTK is based on the principle that the base station and the user receiver are located close together (a maximum 40 kilometers or 25 miles apart) and therefore “see” the same errors. For example, since the ionospheric delays are similar for both the user and the reference station, they can be cancelled out of the solution, allowing higher accuracy.
While in the RTK method corrections are provided for a specific location, in the PPP and PPP-RTK methods, a correction model is broadcast to a larger area, but with slightly lower accuracy. To transmit this correction model, a message format called SSR (Space State Representation) can be used. There is some confusion in the industry about the term “SSR” since it is often associated with the newer PPP-RTK method. But be careful, since “SSR” is occasionally used as a buzzword to refer to traditional PPP services as well.
PPP: Globally accessible and accurate, but at a cost. Precise point positioning (PPP) corrections contain only the satellite clock and orbit errors. Since these errors are satellite specific, and thus independent of the user’s location, only a limited number of reference stations is needed around the world. Because atmospheric errors are not included in PPP corrections, only a lower accuracy level can be achieved with this method. Also, a longer initialization time is expected of up to 20-30 minutes, which may not be practical for some applications. PPP has been traditionally used in the maritime industry; today it has expanded to various land applications such as agriculture as a convenient way to get global GNSS corrections.
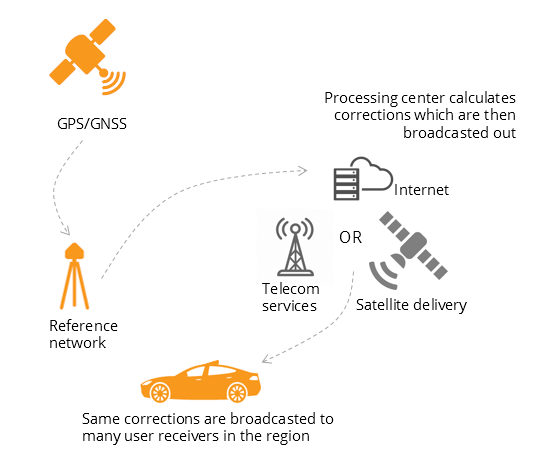
PPP-RTK: Best of both worlds? PPP-RTK (a.k.a. SSR) is the latest generation of GNSS correction services, combining near-RTK accuracy and quick initialization times with the broadcast nature of PPP. A reference network, with stations about every 150 kilometers (100 miles), collects GNSS data and calculates both satellite and atmospheric correction models.
As explained above, atmospheric corrections are regional, and so a denser reference network is needed than for PPP. These corrections are then broadcast to subscribers in the area via internet, satellite or telecom services. Subscribed receivers use the broadcast correction model to deduce their location-specific corrections, resulting in sub-decimeter accuracy.
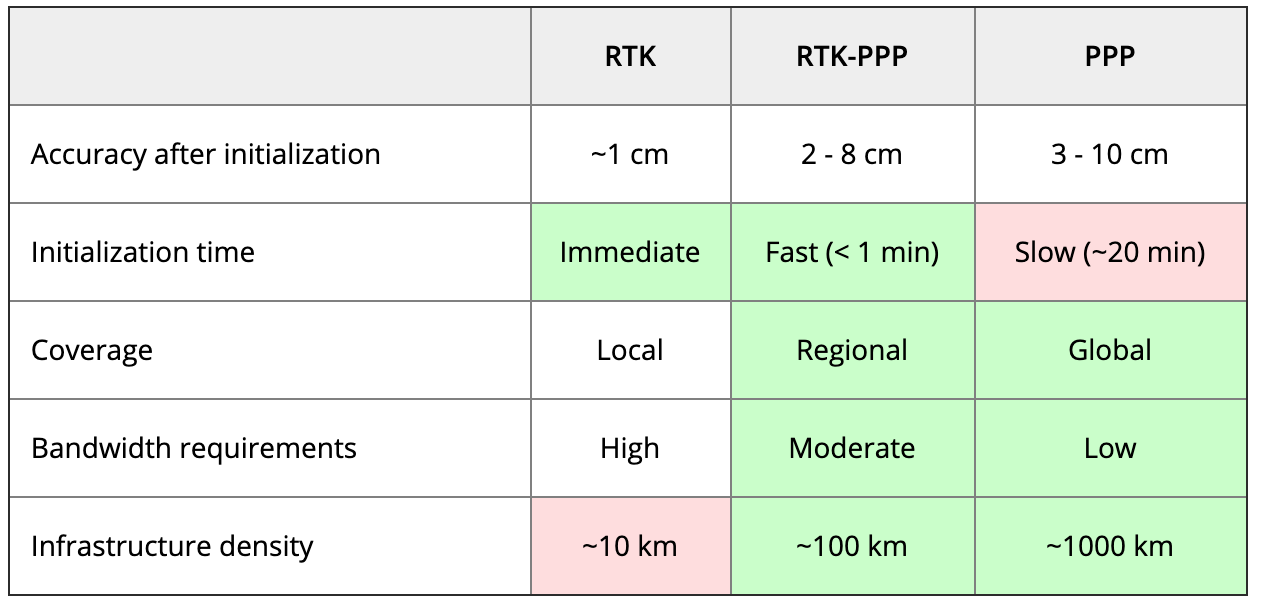
Comparing the three GNSS correction methods
The table below compares the three correction methods, highlighting their strengths and weaknesses.
Table: Septentrio
The infrastructure density and initialization time for all three methods vary with the different kinds of errors that are corrected. The broadcast nature of PPP-RTK and PPP, as well as the lighter infrastructure that they require, makes these methods scalable for mass-market applications.
Types of errors that are corrected by each of the three methods. (Image: Septentrio)
Some GNSS receivers also incorporate advanced positioning algorithms to compensate for receiver-side issues such as multipath (for example, see Septentrio APME+), jamming and spoofing. This adds reliability and robustness to high-accuracy positioning.
Getting GNSS corrections
Modern industrial receivers often get their GNSS corrections via a subscription service, delivered via internet (using NTRIP protocol), satellite or 4G/5G. Today, there is a boom in the correction-service market driven by high-accuracy demands of the automotive industry, automation and smart consumer devices. Automotive suppliers and many other new players are deploying infrastructure to set up services for centimeter-level positioning around the globe.
User receivers often get their GNSS corrections via a subscription service delivered via internet, satellite or 4G/5G. (Image: Septentrio)
PPP and PPP-RTK corrections can even be transmitted directly by the GNSS satellites, as in the Japanese CLAS service from the QZSS constellation, or in the planned High-Accuracy Service (HAS) from Galileo. Depending on the network density and quality of the error modeling, different initialization times and accuracies can be achieved. This means that positioning quality can vary from one service provider to another.
Major telecom companies such as Deutsche Telekom as well as the Japanese Softbank and NTT are equipping their infrastructure with GNSS receivers to enable new corrections services. 3GPP, which provides specifications for mobile telephony including LTE, 4G and 5G, now covers broadcasting of GNSS satellite corrections in its mobile protocol. Since reference receivers are becoming part of critical infrastructure, such as telecom towers, it is essential that they have a high level of security to protect them from potential jamming or spoofing attacks (for example, Septentrio AIM+ technology).
Which corrections are right for me?
The right correction service for your technology will depend on your location and service area, your accuracy and reliability needs, as well as your budget. Because the corrections market keeps expanding, it is now more important than ever that integrators or GNSS manufacturers assist you in selecting the best correction method for your industrial application.
If you choose a GNSS receiver which does not “lock” you to a certain correction service, you will be free to choose a correction method which is most suitable for your application and its location. Such “non-locking” open-interface receivers also offer customers flexibility to switch to another more beneficial service in the future, as correction methods keep evolving.
Klau Geomatics has launched MakeItAccurate, a global GNSS data correction and processing service.
MakeItAccurate takes data from any GNSS receiver on drone or survey equipment and makes it accurate. Users can now achieve centimeter (cm)-level accuracy without the need for base stations, real-time kinematic (RTK) links, data from Continuously Operating Reference Station (CORS) or other external inputs.
MakeItAccurate requires only the raw GNSS data from a drone to produce a highly precise trajectory and turn the traditional autonomous 3-5m GPS accuracy to 3-5 cm anywhere in the world.
In many parts of the United States, Europe, Japan, Australia and New Zealand, absolute accuracy of 2-3 cm XYZ will be achieved. In these areas, the KlauPPK processing engine applies sophisticated hybrid PPK/PPP algorithms, merging global PPP clock and orbit corrections with many distant CORS stations to achieve this high absolute accuracy.
The service enables enterprise drone operations to achieve high accuracy across their entire global operations with one repeatable workflow.
Sectors such as insurance, telecommunications and utilities can scale their operations without additional survey expertise and site-specific data constraints. The same process works for multiple operators on thousands of sites enabling consistent, high accuracy every time, the company said.
MakeItAccurate supports data from all GNSS manufacturers. Native support for DJI M 210v2 RTK or Phantom 4 RTK drones returns precise camera positions with centimeter-level accuracy. Other drones using external PPK GNSS products also can achieve highly accurate kinematic trajectories and camera coordinates.
A MakeItAccurate application programming interface (API) is available to push raw GNSS data to the processing engine and return highly accurate coordinates, with full reporting on the accuracy achieved for the entire trajectory or each camera event. GNSS hardware manufacturers can offer a custom service to add value to their products. Software developers offering artificial intelligence technology, photogrammetry processing or other outcomes that benefit from high accuracy can use the MakeItAccurate API.
Septentrio and CORE partner up to develop a GPS/GNSS receiver which will make use of Japan’s Centimeter-Level Augmentation Service (CLAS). CLAS corrections are broadcast directly via QZSS constellation to enable high-accuracy positioning across Japan.
Septentrio, a designer and manufacturer of high-precision GNSS technology, and CORE, a Japanese system integrator with extensive experience in GNSS, are jointly developing a receiver that can use the Centimeter-Level Augmentation Service (CLAS) of Japan’s Quasi-Zenith Satellite System (QZSS).
Septentrio’s multi-frequency GPS/GNSS receiver AsteRx4 will be used as a platform for the development of CLAS functionality. Septentrio receivers already track the L6 signal and can use QZSS for increased positioning availability and reliability.
CORE’s know-how will be instrumental for the deployment of CLAS on Septentrio receivers. The two companies are planning to launch their CLAS-enabled receiver in January 2020.
Japan’s CLAS is a self-augmentation GNSS correction service. Without the need for a ground link, it allows real-time kinematic (RTK) centimeter-level positioning all over Japan with convergence times of less than a minute.
It does this by broadcasting GNSS corrections directly via QZSS satellites, also known as Michibiki. These corrections are generated from the dense network of reference stations operated by Japan’s Geospatial Authority.
The two companies have also entered into a distribution contract that allows CORE to sell Septentrio high-precision positioning technology, including CLAS-capable GNSS receivers, in the Japanese market.
The new CLAS-enabled receiver will also incorporate Septentrio’s Advanced Interference Mitigation (AIM+) technology. In busy urban environments electromagnetic waves can interfere with GPS and GNSS signals.
AIM+ offers protection against such interference resulting in faster set-up times and robust continuous operation.
“QZSS Centimeter Level Augmentation Service has been limited to evaluation phase up till now. Realizing CLAS on Septentrio’s multifunctional, high-quality, cost-competitive platform allows our customers to finally use QZSS in their applications,” emphasized Takahiro Yamamoto, Director of GNSS Solution Development Center at CORE Corporation. “Galileo High Accuracy Service (HAS) is expected to start in 2020, so the demand for high accuracy GNSS receivers is also expected to increase. By complementing CORE’s QZSS technology and Septentrio’s Galileo technology, we can provide competitive products to global customers.”
“CLAS is a first-of-its-kind service which will contribute to the proliferation of high accuracy GNSS applications in Japan. Europe is also taking similar initiatives with their Galileo High Accuracy Service (HAS),” commented Neil Vancans, Director of Global Sales at Septentrio. “We are excited to enter into an agreement with CORE to enable the support of CLAS on our receivers. CORE’s expertise allows us to get the best out of CLAS and to follow new developments in QZSS evolution. Moreover, CORE’s expertise in system integration will allow us to tackle new markets in Japan.”
The Trimble CenterPoint RTX correction service, enabling centimeter-level absolute positioning around the world without the need for RTK reference-station infrastructure, is now available to many users, including integrators of professional high-precision equipment and consumer products such as in the automotive sector. Access is provided via a software library compatible with any GNSS device. The corrections now contain detailed integrity information for safety-critical applications.
The RTX infrastructure is made up of approximately 120 globally distributed RTX reference stations. Receivers at these stations transmit measurement data at 1 Hz to the RTX server centers, where the correction data is computed. For redundancy purposes, multiple servers in the United States and Europe are operated. A failsafe architecture avoiding any single point of failure in the processing chain has produced a very high availability of corrections. Today the system supports GPS, GLONASS, Galileo, BeiDou and QZSS satellites. It is a multi-frequency system supporting two or more frequencies for each satellite system.
The correction stream is available to users using L-band signals broadcast via geostationary satellites and IP connections. The L-band transmitted RTX data stream uses a bandwidth of 600–2400 baud, and a highly compressed data format with a resolution of 1 millimeter, with an average latency of 8 seconds in L-band mode and 5 seconds in IP mode. The data stream is encrypted via an Advanced Encryption Standard (AES) with a key length of 256 bits to guarantee safe transmission. Data transmission integrity is assured with a 32-bit cyclic redundancy check attached to every message. The RTX correction stream provides information on satellite position, satellite clock, ionospheric and tropospheric models, and code and phase biases.
The orbit determination is done in real time using a reduced dynamic approach with dynamic models and exploiting the accuracy of the phase measurements after ambiguity fixing. Based on the computed orbits, the satellite clocks are estimated at 1 Hz, where integer ambiguity fixing is performed for the different satellite systems.
Next, a single-layer global ionospheric model is computed and represented through spherical harmonics. There are currently two areas with a denser network than the global network; these cover Europe and the mainland U.S. with more than 1,000 base stations. Using these stations, regional ionospheric and tropospheric models are computed, which then provide a fast convergence (RTX-Fast service).
The satellite position and clock information has centimeter accuracy and allows the client to compute precise point positioning (PPP) with carrier-phase ambiguity resolution. Table 1 shows service accuracy.
Table 1. Accuracy of the RTX corrections from more than three years (June 2015–July 2018) of residuals computation in the European RTX-Fast network. (Table data: authors)
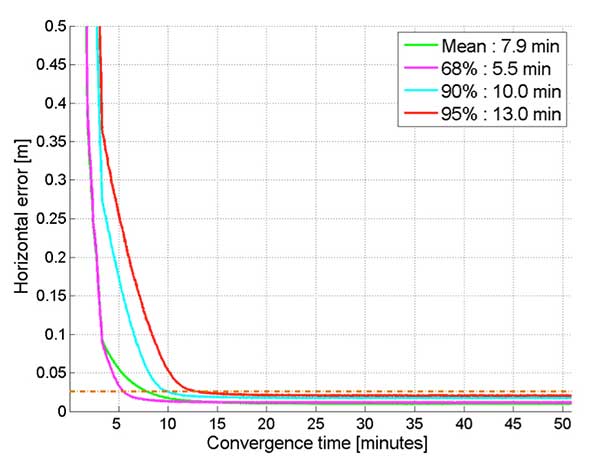
Once the ambiguities are resolved, the position solution is accurate to a few centimeters. The global RTX-Standard service provides convergence times of 7 minutes to 20 centimeters (cm) horizontal error (95%) and to 2.5 cm (95%) in 13 minutes as shown in Figure 2. The regional RTX-Fast service (U.S., Europe) provides convergence times of less than a minute with centimeter accuracy. The warmstart convergence time is approximately 13 seconds.
Figure 2. Global convergence of RTX out of 52 globally distributed stations covering one month of data. (Image: Trimble)
The accuracies specified are achievable with precise Trimble GNSS positioning hardware. For integration into non-Trimble devices, an RTX software library is offered, which gives the user real-time access to the individual data in the RTX correction stream. For use of this library in safety-critical systems such as advanced driving-assisted systems (ADAS) or semi-automated driving, this library was certified to follow the ASIL-B ISO 26262 standard and the automotive ASPICE standard. This library is available for easy integration into third-party applications.
In addition to the real-time RTX solution, a web-based post-processing solution is available for public use free of charge. It is possible to upload static Trimble or RINEX files to the server, post-process the measurement data, and retrieve a precise position in various coordinate frames.
Service integrity is continuously monitored at independent stations from the RTX tracking networks in Europe and the US. The integrity of the service is provided at the correction data domain. The integrity monitoring part of the RTX system minimizes the risk due to events such as unplanned satellite maneuvers or wrong broadcast ephemeris; satellite signal or clock anomalies; ionospheric storms; or problems in transmitting the RTX correction stream.
The monitoring stations compute phase observation residuals (with ambiguity fixing) using the station measurements and the received RTX corrections. These residuals represent the actual errors of the corrections as seen by the monitoring stations at the line-of-sight (Table 1). The thresholds at which corrections are considered as faulty are the following: 0.5 m + QI (quality indicator) for orbit + clock corrections and regional tropospheric models, and 1.0 m + QI for regional ionospheric models.
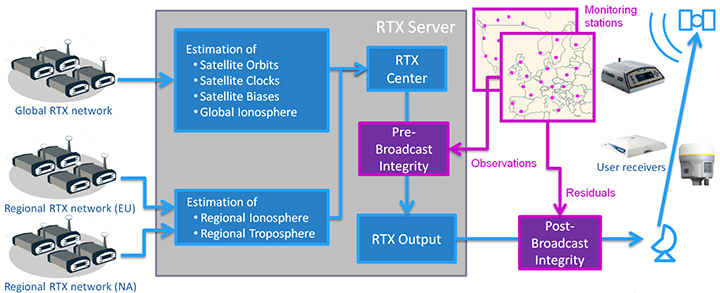
The integrity monitoring consists of two steps (Figure 1): a pre-broadcast check, where potentially faulty corrections are detected and filtered out before leaving the computing server, and a post-broadcast check, where additional errors in the transmission channel are detected and alarms are issued to the users.
Figure 1. Generation and transmission of RTX global and regional corrections, including pre- and post-broadcast integrity monitoring. (Image: Trimble)
Integrity flags and alarms are constantly inserted into the correction stream and output by the RTX client library. The integrity information notifies clients of the presence of integrity monitoring and provides timely alerts in case of detected correction-data integrity violations. The time-to-alert limit goals are 17 seconds for L-band transmission and 13 seconds for IP transmission for the RTX service.
The RTX corrections includes quality indicators. In particular, the quality indicator for the satellite clock includes a “DoNotUse” flag to indicate potential problems with the given satellite. This flag prevents the use of the satellite for positioning when received by the user. The quality indicators of the corrections are indeed a first integrity layer. In 2017 the pre-broadcast integrity monitoring was added to act as a second layer. In 2019, with the addition of the post-broadcast integrity monitoring, a third integrity layer was added to the RTX correction data stream.
The RTX system provides access to centimeter-level corrections allowing centimeter positioning on a global basis. RTX-Fast services are available in Europe and the U.S. with pre- and post-broadcast integrity monitoring currently being deployed.
The authors are engineers with Trimble Terrasat GmbH, Germany.
Emlid, the creators of Reach, centimeter-accurate RTK GNSS receiver, is now taking pre-orders for its multi-band GNSS receiver Reach RS2. The new receiver features a built-in LoRa radio, a 3.5G modem, and a survey app for iOS and Android.
Photo: Emlid
L1/L2/L5 RTK GNSS receiver with centimeter precision. Reach RS2 determines a fixed solution in seconds and provides positional accuracy down to several millimeters. The receiver tracks GPS/QZSS (L1, L2), GLONASS (L1, L2), BeiDou (B1, B2), Galileo (E1, E5) and SBAS (L1C/A), and reliably works in RTK mode on distances up to 60 kilometers and 100 kilometers in PPK mode. A multi-feed antenna with multipath rejection offers robust performance even in challenging conditions.
RINEX raw data logs are compatible with OPUS, CSRS-PPP, AUSPOS and other PPP services so users can now get centimeter-precise results any place on Earth.
Built-in 3.5G modem and UHF LoRa radio. The Reach RS2 features a power-efficient 3.5G HSPA modem with 2G fallback and global coverage. The corrections can be accessed or broadcast over NTRIP independently, without relying on internet connection on a smartphone.
For remote areas, the Reach RS2 has a built-in LoRa radio that has proven to be a reliable link for RTK corrections for distances up to 8 kilometers.
Designed for Tough Conditions. The Reach RS2 is engineered to be waterproof and impact-resistant. Its body is manufactured in a two-step injection process and is made out of shockproof polycarbonate covered in a special elastomer for extra protection. The receiver has an industry-standard 5/8-inch mounting thread.
The LiFePO4 battery of the Reach RS2 is designed for 16 hours of work as a 3.5-G RTK rover on one charge regardless of weather conditions. It can charge from a USB wall charger or a power bank over USB-C.
A RS232 interface allows users to connect the Reach RS2 directly to external hardware and output position in NMEA.
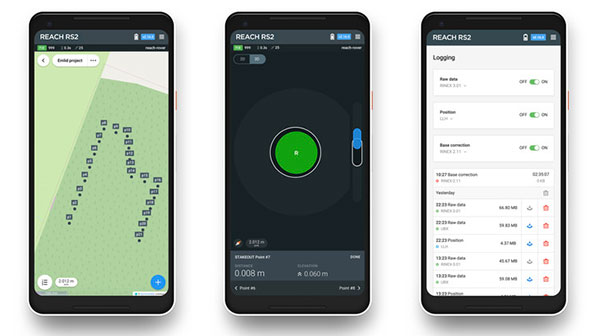
Photo: Emlid
ReachView App. The Reach RS2 comes with a mobile app, ReachView for iOS and Android, that is used to control all the features of the device. Users can create projects, collect and stake-out points, and import and export geodata in industry-standard formats such as CSV, DXF and Esri Shapefile.
The Reach RS2 comes in a carrying bag with a USB-C cable and a LoRa radio antenna. The ReachView app is available for download from Play Market or App Store.
Shipping of the first batch starts in mid-June 2019.