By Yanming Feng and Charles Wang,
Queensland University of Technology, Australia,
and
Charles Karl, Australia Road Research Board, Australia /
Presented at ION International Technical Meeting 2018
Connected vehicle safety and traffic applications depend on communication, position and velocity information to function. However, road users may have different vehicle communicating and positioning capabilities. Further, the performance of communicating and positioning could vary from time to time and location to location.
The vehicle safety system must be fully aware of the performance of vehicle positioning outputs and warn drivers when the positioning system cannot be used for the intended level of safety applications. Minimum operational performance standards about positioning have not been established in the road community.
This paper reviews and develops the required navigation performance parameters for vehicle positioning capability in terms of accuracy, integrity, timeliness and interrogability of positioning solutions.
It attempts to adjust the integrity performance parameters for vehicle safety positioning and provide the analysis for integrity risk, protection level and different alert limits. It introduces the error ellipse representation to visualize the protection bubble area of each vehicle on the road. Experimental results demonstrate how different capability levels meet different integrity alarm limits.
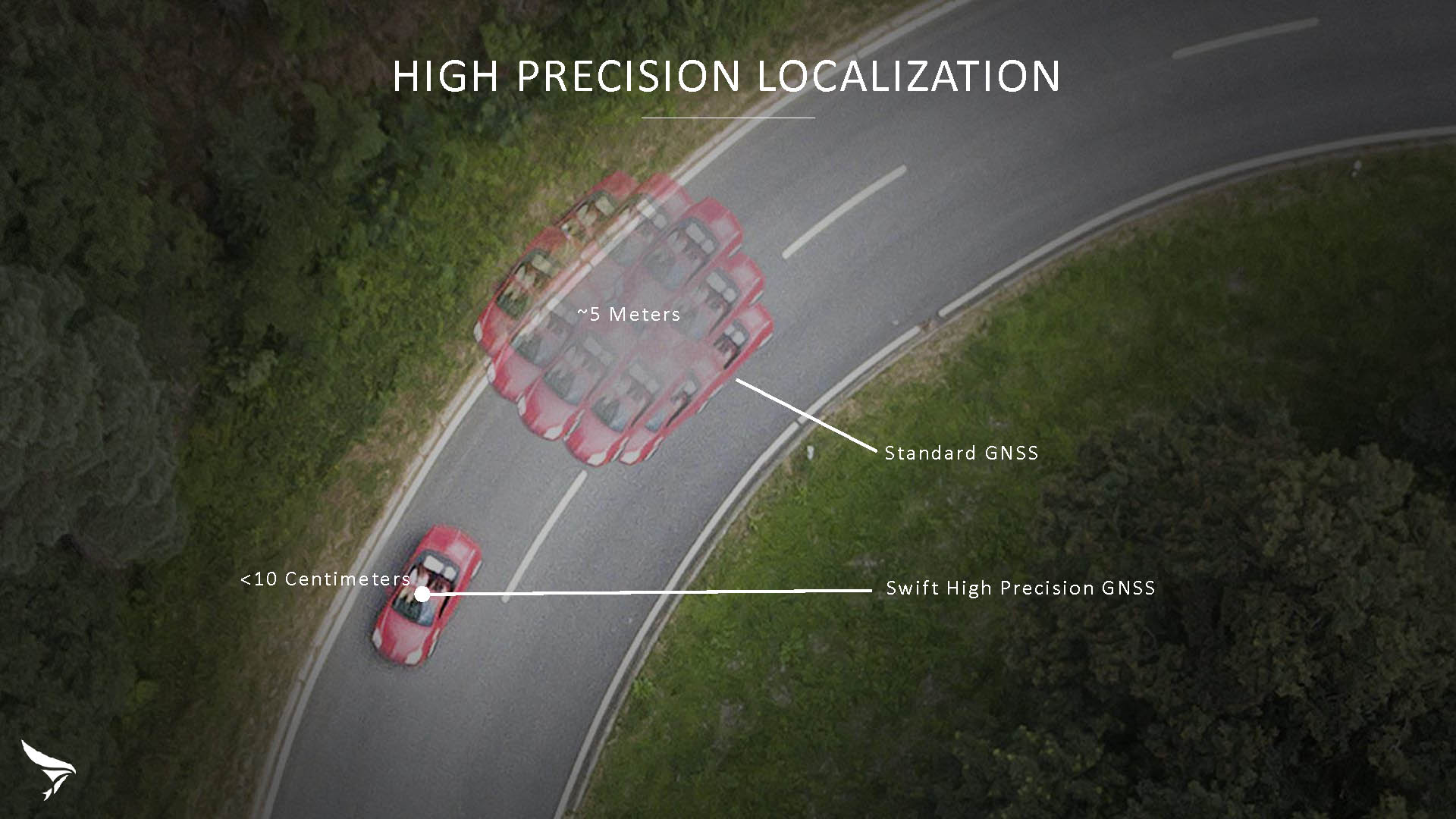
Swift Navigation has released Skylark, a cloud-based GNSS corrections service delivering centimeter-level accuracy without deploying and maintaining a GNSS network. Skylark targets autonomy applications at scale and enables high-precision positioning for mass market automotive and autonomous vehicle applications.
Skylark works with both of Swift’s multi-band, multi-constellation GNSS receivers, the Piksi Multi and the Duro ruggedized industrial receiver. Swift added GLONASS support in its 1.4 firmware upgrade, announced earlier this month, and aims to include Galileo and BeiDou in the near future.
Previously known as a hardware company, Swift Navigation appears to be shifting its focus a bit, including an Internet-delivered service in addition to its GNSS receivers. It has recently focused more closely on the automotive sector; it also has customers in drone technology, robotics and precision agriculture.
Its new platform for high-precision GNSS navigation of autonomous vehicles, via Internet connectivity, Skylark delivers fast convergence times measured in seconds, using positioning algorithms to provide a continuous stream of data to individual devices from the cloud. The data stream allows for quick and robust positioning and high reliability and availability, even in challenging environments, according to the company.
The Skylark service offers accuracy at the centimeter level. (Image: Swift Navigation)
Critical requirements for real-time absolute localization through GNSS for the automotive sector, according to Fergus Noble, co-founder and CTO of Swift Navigation, are:
high accuracy; centimeter level
availability; fast convergence, measured in seconds
integrity
scalability to support a large vehicle population
low cost.
Internet-Delivered via Cell Network
The last two requirements are fulfilled by the cloud-based approach. He characterized Skylark as a hybrid of RTK (Real Time Kinematics) and PPP (Precise Point Positioning) approaches augmented by Swift’s intellectual property, with corrections delivered over the Internet as provided by the cellular network, which he described as “robust to outages.” Cell coverage along road networks is good, Noble asserted, and 5G applications are increasing that coverage and will further enable connected vehicles. Automotive OEMs are comfortable with the level of cell coverage for this application, according to him. There has been testing to show robustness in most rural areas, and network operators are dedicated to increasing this.
“Skylark operates like a utility,” said Noble. “It is a simple, low-cost Internet data stream that provides customers with a complete high-integrity GNSS solution. Simply supply a Swift receiver with power and Internet connectivity and get real-time corrections for highly-dynamic GNSS applications.”
To realize the Skylark service, the company hired a team of cloud-based engineering experts who had a role in building Amazon and Oracle critical infrastructure. Swift Navigation is initially launching only with its own devices, but is making the service publicly-available for any customer in any vertical requiring precise positioning. “Every car company is building in autonomous functionality,” noted Noble, making clear who the company is ultimately targeting.
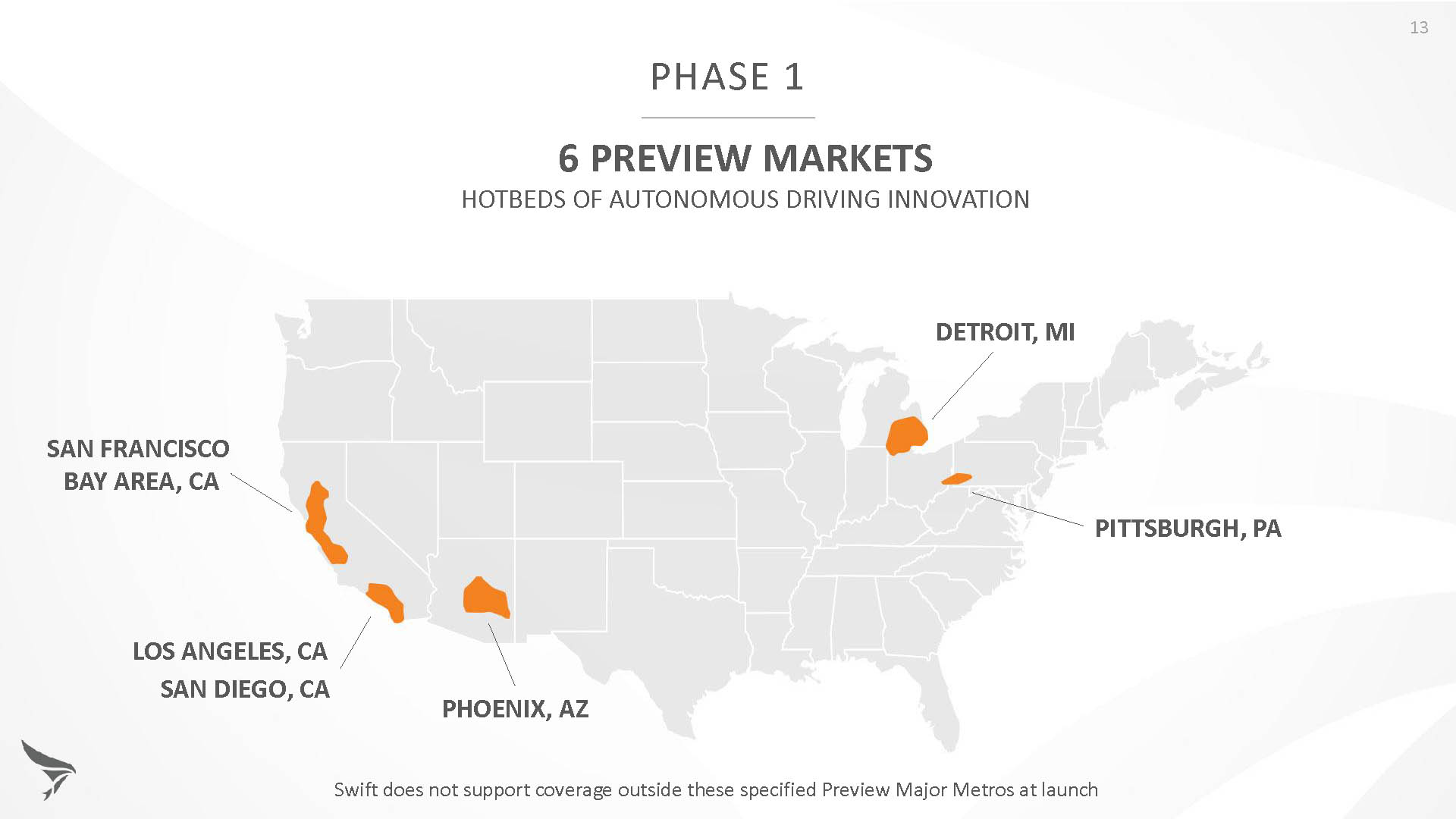
Skylark is currently offered in six metropolitan markets. (Image: Swift Navigation)
Swift has been working with beta customers for more than a year and is now previewing the service to all customers in six metropolitan markets: the San Francisco Bay Area, Los Angeles, San Diego, Phoenix, Pittsburgh and Detroit. The company envisions full contiguous U.S. and ultimately global expansion. Customers in preview areas with Swift receivers can sign up for Skylark and immediately start receiving corrections.
The service maintains low bandwidth to save on data costs and is offered with a free 30 day trial and flexible pricing plans. Skylark’s pricing structure includes a monthly plan and an annual plan. Enterprise pricing is available for volume orders.
Voyage Self-Driving Car Active Service and Coming Expansion
An early beta user of the service, Voyage deploys self-driving taxis in private communities across North America. “Skylark and Piksi Multi are working safely and efficiently in a real-world application today at The Villages, a retirement community in San Jose, California,” said Oliver Cameron, co-founder & CEO of Voyage.
Voyage incorporates Skylark GNSS corrections in controlled road networks in private communities. (Image: Swift Navigation)
Voyage’s passenger cars carry a roof-racked suite of sensors: the Swift Navigation Piksi Multi GNSS receiver, LiDAR, cameras, radar, and an inertial measurement unit. A computer in the trunk integrates all sensor signals and uses the car’s CAN bus to operate steering, braking, and other functions. An operator sits behind the wheel at all times, sometimes with a co-pilot: one to watch the road ahead, and one to watch the software. “Safety is our first priority,” said Cameron.
The service is especially valuable to customers with mobility limitations that might prevent them from walking to an event or moving within the community. (Image: Swift Navigation)
The Voyage fleet stays within the bounds of a given community, where all roads have been precisely mapped, speed limits are lower and traffic patterns are more clearly defined than in metropolitan cities. The first in the San Jose area serves private community of more than 4,000 residents, with a 15-mile road network. Today, residents are able to summon a Voyage self-driving taxi using a smartphone app and have a ride waiting at their front door. This service is especially valuable to customers with mobility limitations that might prevent them from walking to an event or moving within the community. Voyage takes residents of The Villages to and from the gym, to visit with friends, to the golf course and to community center events.
Image: Swift Navigation
Voyage will next deploy the Swift product suite in its upcoming deployment launching to 160,000 retirees at The Villages complex in Florida, over a road network of 750 miles. It is currently in a “Q/A” testing phase on that site, working the technology and the local mapping through their paces.
Danlaw Inc. has released its Through Glass Integrated V2X Antenna for vehicle-to-vehicle and vehicle-to-everything (V2X) communications.
The design incorporates an integrated GNSS antenna on the interior coupler. Optional cellular, Wi-Fi, and other antennas are also available on request.
The antenna pairs with dedicated short-range communications (DSRC) devices to enable vehicle-to-vehicle, and vehicle-to-infrastructure communications.
Traditional aftermarket antennas require drilling holes or passing cables through window and door openings, which risks damaging vehicle seals.
Danlaw’s dual-radio, glass-mounted antenna eliminates the risk of damaging the vehicle by using a coupling pair-to-pass DSRC signals between the vehicle’s interior and exterior.
The easy-to-install antenna can be mounted on the rear, front or side windows using automotive grade glass adhesive. This flexible installation allows the shortest cable route to the V2X device, reducing signal losses due to cable length, the company said.
“Our customers running pilot programs want to install V2X DSRC systems on vehicles with best-in-class RF performance without modifying their cars,” said Scott Morell, Danlaw’s vice president of engineering. “Combined with our Aftermarket V2X Safety Device, this enables V2X capabilities to be installed on vehicles simply and easily.”
The antenna enhances Danlaw’s Connected Vehicle portfolio which includes an aftermarket safety device (ASD) and V2X development tools.
The ASD has been selected by pilot programs supporting multiple applications, including critical safety advice, driver access solutions, and real-time road condition and congestion information.
Danlaw development tools include the OmniAir-certified Mx-DSRC Conformance Test System and Mx-Drive Mobility Simulator.
Detailed specifications for the antenna are available.
There was plenty for a philosophy major to sink his teeth into at ION’s January workshop on Cognizant Autonomous Systems for Safety Critical Applications (CASSCA).
What is knowledge? What is meaning? What is understanding? What is intelligence? What is learning? What is thinking?
These questions excited Plato and Kant, Buddha and Descartes, perhaps out of intellectual or spiritual curiosity. Who’s to say? But the people asking them now are driven, quite literally, by practicalities. They have come to realize that we cannot ride in driverless cars or fly in pilotless plane-taxis, we cannot live in an autonomous, artificially intelligent environment without knowing a bit more exactly what knowledge is, in this brave new world.
Without thinking about what thinking may be, for a machine.
Why does this matter to a GPS/GNSS/PNT readership? Because as positioning and navigation engage more deeply with artificial intelligence (AI) generally, and with autonomy in particular, these issues emerge as part of the environment that such solutions explore, and in which they must verify and validate themselves.
Welcome to the future, it’s yours. Now think about it.
Culture Club. Some of us may have believed that only technical obstacles remain in the path of a driverless car and an otherwise automated society, salted with a few regulatory wrinkles to iron out. But as build-a-robot R&D projects transform into full commercial partnerships, cultural challenges jump up as well: inertia, instability of requirements, unanticipated expectations, magical thinking (the development of empathetic attitudes towards robots), misplaced trust and misplaced distrust. All this according to Signe Redfield, roboticist and mission manager at the U.S. Naval Research Laboratory.
Joao Hespanha, professor of electrical and computer engineering at the University of California, Santa Barbara, outlined three key concepts for AI development: computation, perception and security. The critical questions for the first named are, how much computing will be done onboard the platform, how much learning will be done onboard, and how much of each process will be distributed to offboard computation. Perception, a crux for autonomy, is closely bound in a feedback loop with control. The platform must gather data to make autonomous decisions (control), and those decisions must maximize the gathering of information (perception).
Amply consider security. All safety-critical systems must provide for — and prevent where possible — decisions based on compromised measurements, which may stem from system or environmnetal noise, sensor faults, hacked sensors, or other corruptions.
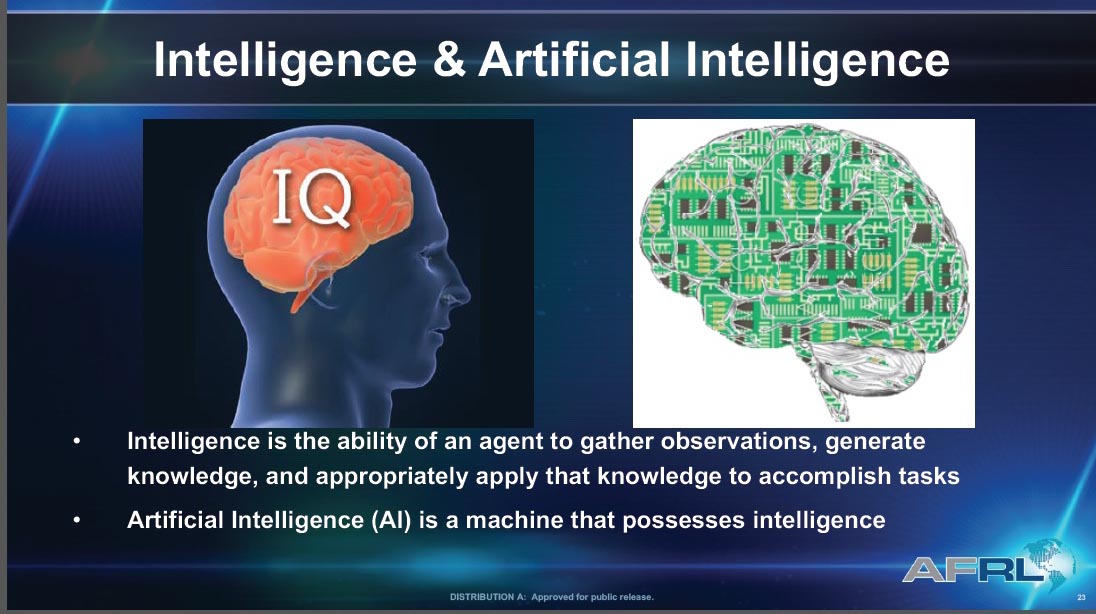
Second Wave. We are in the second wave of AI, according to Steven Rogers, senior scientist for sensor fusion at the Air Force Research Laboratory. In the first wave, 60s and 70s, large and complex algorithms, relatively low on data, drove new developments — but they hit real-world problems, hard. Since the mid-80s, we have been in the “classify” stage with relatively simpler programs generating and consuming lots of data. Intense statistical learning will eventually lead to the third wave of AI: Explain.
On a timeline yet to be determined, contextual adaptation will give rise to “explainable” AI, capable of answering unexpected queries. That is, it will have learned how to teach itself.
Some of this stuff gets pretty scary.
Most future knowledge will be machine-generated.
Let’s run through that one more time.
“Most future knowledge on Earth will come from machines extracting it from the environment,” said Rogers. “Machine generation of knowledge is key for autonomy.”
Here’s where the thought processes really started to levitate. “Current sense-making solutions are not keeping pace, not growing as knowledge is growing,” Rogers asserted. And he challenged us with the questions posed at the beginning of this column: in AI, the context we will use to explore much of the future, what is knowledge? What is meaning? And so on.
He gave us one of his answers: “Knowledge is what is used to generate the meaning of the observable for an autonomous system. Correspondingly, machine-generated knowledge is what is used to turn observables into machine-generated meaning.”
Slide from Steven “Cap” Rogers’ presentation at CASSCA.
He suggested a book by George Lakoff and Mark Johnson, Metaphors We Live By. Pretty heady stuff for a room full of engineers. I don’t know about you. I’m headed down to the library to check it out.
Requirements, Simple/Not. We got back to earth with some technical challenges we could actually chew on with David Corman, program manager for Cyber-Physical Systems and Smart and Connected Communities at the National Science Foundation. Seemingly simple requirements for safety-critical applications break down into hundreds of requirements that no one has really thought about, Corman said, as he displayed a chart of “Some Example Research Problems.”
Precision agriculture and environmental monitoring are two sectors where he thought autonomous operations come closest to being full realization, because their operational environments are structurally defined enough. In such constrained niches that we more fully understand, we can implement autonomous operations. Elsewhere, “we don’t know how to specify what we want, so that we get only ‘good results’ and no ‘bad results.’ ”
He identified a looming Cambrian explosion in AI, analogous to that for plants and animas following the dinosaur extinction, in which systems interact, gather data, sense the environment, learn, improve and multiply. He suggested we browse “The Seven Deadly Sins of Predicting the Future of AI,” an essay by Rodney Brooks.
The afternoon’s workshop talks followed, from experts in autonomous flight software, legal and insurance aspects of autonomy, the Ohio State University’s Center for Automotive Research, and the U.S. Department of Transportation. But I tell you, this morning done my brain in.
Before folding up, I must mention a short video on autonomous flying taxis displayed by Paul DeBitetto, VP of software engineering at Top Flight Technologies. It depicts Pop.Up, a modular ground and air passenger vehicle for megacities of the future. Check it out.
The CASSCA workshop was organized and moderated by Zak Kassas, an assistant professor at the University of California, Riverside and director of the Autonomous Systems Perception, Intelligence & Navigation (ASPIN) Laboratory. He is also co-author of two cover stories in GPS World, “LTE cellular steers UAV” and “Opportunity for Accuracy.”
ION president John Raquet expressed the hope that we may see a fully fledged conference on this topic in the near future: CASSCA 2019, perhaps, to join the rotating repertory of ION annual meetings.
Agreed. We need to think more.
Don’t look back, the machines may be gaining on us.
Qualcomm Technologies Inc., a subsidiary of Qualcomm Incorporated, announced several automotive agreements at the Consumer Electronics Show (CES) 2018, at North Hall Booth 5616. The show took place Jan. 9-12 in Las Vegas.
As the automotive industry advances toward 5G, highly advanced connectivity solutions are needed to support road safety, mission critical applications, as well as advanced capabilities, such as autonomy.
With the Qualcomm Snapdragon automotive platform’s integrated GNSS and automotive dead reckoning, future vehicles are expected to have the increased capability to effectively be aware of its surroundings.
2017 Jaguar Land Rover. (Photo: Jaguar)
Jaguar Land Rover.Jaguar will use the Qualcomm Snapdragon automotive platform in the Land Rover to power highly advanced telematics, infotainment and digital cluster with integrated connectivity and rear-seat entertainment. The platform will help meet the demand for rich, immersive and seamless connected in-vehicle experiences in future Jaguar Land Rover vehicles.
For telematics units, Jaguar Land Rover will use the Snapdragon 820Am automotive platform to provide customers with ultra-quick and efficient connectivity throughout the vehicle by integrating 4G LTE Advanced, Wi-Fi and Bluetooth technologies.
As Qualcomm Technologies’ most advanced automotive solution, the Snapdragon 820Am Automotive platform features a custom-built 64-bit Qualcomm Kryo CPU, custom-built Qualcomm Adreno 530 GPU for virtualization advantages, and Qualcomm Hexagon 680 DSP Vector eXtension to stream high-definition videos seamlessly onto multiple displays.
It also features the Snapdragon X12 LTE modem to support Category 12 speeds up to 600 Mbps download, as well as vehicle sensor integration and computer vision to support driver assistance using the Snapdragon Neural Processing Engine.
2018 Honda Accord.The 2018 Honda Accord features the Snapdragon Automotive Platform to power applications for its in-vehicle infotainment and navigation system. The 2018 Honda Accord also features a Qualcomm 4G LTE modem designed to support the Hondalink vehicle connectivity system.
BYD Electric Vehicles. Chinese new energy company BYD Company Ltd. also selected Qualcomm Technologies’ automotive solutions for its upcoming electric vehicles. Anticipated to begin in 2019, BYD electric vehicles will feature integrated infotainment and digital cluster systems powered by the Qualcomm Snapdragon 820A Automotive platform.
The software architecture, hypervisor support and integration capability of the 820A supports BYD’s efforts to integrate its infotainment and digital cluster systems into a single electronic control unit (ECU). This is designed to deliver significant optimization and integration benefits compared to previous architectures, which used several different ECUs within the vehicle.
Qualcomm Technologies’ automotive solutions help improve power efficiency within the integrated ECU, which aids in enhancing the vehicle overall performance, battery life and driving range. The use of Qualcomm Technologies’ integrated infotainment and cluster system with Snapdragon 820A Automotive platform is designed to support a unified user interface, improvement in contextual awareness, and a rich in-vehicle user experience with multimedia.
Visteon Cockpit.Visteon Corporation plans to deliver the next-generation of its SmartCore cockpit controllers using automotive solutions from Qualcomm.
Future SmartCore cockpit controllers will feature the Qualcomm Snapdragon 820A Automotive platform to support automakers’ demand for highly advanced virtual cockpit controllers, which Visteon will design to support autonomous driving technology and applications.
Visteon’s SmartCore domain controller, which can independently operate several cockpit domains on one system-on-a-chip (SoC) through a single driver interface, will be the first platform-based domain controller to incorporate the Snapdragon 820A Automotive platform.
Using Snapdragon automotive solutions from Qualcomm Technologies, Visteon aims to make available technologies to support advanced virtual cockpits and autonomous driving through Visteon’s scalable hardware and software stack in SmartCore and its DriveCore autonomous driving controller.
DriveCore is an open platform consisting of the hardware, middleware and frameworks to develop machine learning algorithms for object classification, detection, path planning and execution.
Visteon is scheduled to launch the first SmartCore-based solution in 2018 on a high-volume, global vehicle platform with a European automaker.
Renesas will use NovAtel’s high-performance SPAN tightly coupled GNSS and inertial navigation system (INS) technologies with GNSS correction services for live autonomous vehicles and advanced driver assistance systems (ADAS) demonstrations throughout CES.
SPAN GNSS+INS products provide position, orientation and time solutions that are critical for autonomous applications.
NovAtel’s assured positioning technology not only delivers solutions based on signals from satellite constellations but also uses vehicle behavior modelling, inertial sensor integration and GNSS correction signals to improve accuracy and significantly reduce interruptions in availability.
Image: NovAtel
Renesas relies on NovAtel products to provide high integrity and accurate positioning for autonomous driving, ADAS, connected car feature demonstrations and automotive solutions that will be showcased at CES 2018.
With the commitment to ensure autonomous vehicles have assured positioning solution, a team of engineers formed the Safety Critical Systems Group at NovAtel to meet the exceptional performance and safety requirements of autonomous vehicles at the necessary production volumes and price point required.
Since its formation, the group has made many positive partnerships in the automotive industry.
NovAtel and Renesas are currently collaborating on implementing NovAtel’s high-performance GNSS+INS positioning solution with the Renesas R-Car H3 system-on-chip (SoC). The R-Car H3 is compliant with the ISO 26262 functional safety standard for automotive applications, which aligns with NovAtel’s automotive strategy.
NovAtel has a long history providing industry leading high-precision GNSS solutions that are high quality and reliable. As an ISO 9001 certified company, NovAtel is also developing an extensive product line of receivers, antennas, correction signals, positioning algorithms, sensor fusion solutions and systems that fulfill specific safety requirements of the automotive industry such as ISO 26262.
BlackBerry Limited and Baidu Inc. are collaborating to accelerate the deployment of connected and autonomous vehicle technology for automotive OEMs and suppliers worldwide.
The companies have signed a statement of intent to make BlackBerry QNX‘s ISO26262 ASIL-D certified safety operating system (OS) the foundation for Baidu’s Apollo autonomous driving open platform.
Also, BlackBerry and Baidu will work together to integrate Baidu’s CarLife, the leading smartphone integration software for connected cars in China, as well as its conversational artificial intelligence system DuerOS, and high-definition maps to run on the BlackBerry QNX Car (Infotainment) Platform.
Blackberry QNX will host demonstrations of its foundational software for autonomous and connected vehicles at the Consumer Electronics Show (CES) 2018, at North Hall Booth 7523. The show takes place Jan. 9-12 in Las Vegas.
“BlackBerry QNX has established itself as the OS platform for safety-certified production-based systems,” said Li Zhenyu, general manager of Intelligent Driving Group, Baidu. “We aim to provide automakers with a clear and fast path to fully autonomous vehicle production, with safety and security as top priorities. By integrating the BlackBerry QNX OS with the Apollo platform, we will enable carmakers to leap from prototype to production systems. Together, we will work toward a technological and commercial ecosystem for autonomous driving, intelligent connectivity and intelligent traffic systems.”
“Joining forces with Baidu will enable us to explore integration opportunities for multiple vehicle subsystems including ADAS, infotainment, gateways and cloud services,” said John Wall, senior vice president and GM of BlackBerry QNX. “Baidu has made tremendous strides in artificial intelligence and deep learning. These advancements paired with their high-definition maps and BlackBerry’s safety-critical embedded software and expertise in security will be crucial ingredients for autonomous vehicles.”
Announced by Baidu in April 2017, Apollo is an open platform that provides a comprehensive, secure, and reliable solution that consists of cloud services, an open software stack and reference hardware and vehicle platforms. It supports all major features and functions of an autonomous vehicle.
More than 70 global partners are involved with Apollo, including OEMs, Tier 1 suppliers, developer platforms and technology start-ups. The project was named after the historic lunar landing program to illustrate its scale and complexity. BlackBerry provides OEMs with cybersecurity technology to protect and mitigate, including hardware, software, applications and end-to-end systems from cyberattacks.
BlackBerry’s pedigree in security and continued innovation has led to recent automotive design wins with Delphi, Denso, Qualcomm, Visteon and others.
A free Cognizant Autonomous Systems for Safety Critical Applications (CASSCA) Workshop will be held 8:30 a.m.-5:30 p.m. on Jan. 29 at the Hyatt Regency Reston in Reston, Virginia. This is scheduled to take place the day before and at the same location as the Institute of Navigation’s International Technical Meeting and Precise Time & Time Interval Systems and Applications (ION ITM/PTTI) 2018 conference.
The workshop consists of a full day of presentations and discussions on the opportunities and challenges associated with developing fully autonomous systems that are cognizant and trustworthy for safety-critical applications by leading experts in the field. Speakers include:
David Corman, Program Manager, Cyber-Physical Systems Program; National Science Foundation (NSF). Dr. Corman’s current research interests are in the field of Cyber Physical Systems (CPS), security for CPS, unmanned systems, manufacturing, and technologies supporting Smart and Connected Communities.
Paul DeBitetto, Vice President, Software Engineering; Top Flight Technologies. Dr. DeBitetto leads all Top Flight’s Software and Embedded Systems Development. That includes product-related flight control, simulation, computing, sensing, data communications, security-related controls and software solutions.
Finch Fulton, Deputy Assistant Secretary for Transportation Policy; Department of Transportation (DOT)
Joao Hespanha, Professor and Chair of Department of Electrical and Computer Engineering; University of California, Santa Barbara. His current research interests include hybrid and switched systems; multi-agent control systems; distributed control over communication networks (also known as networked control systems); the use of vision in feedback control; stochastic modeling in biology; and network security.
Robert Peterson, Professor and Director of Center for Insurance Law and Regulation; Santa Clara University.
Mr. Peterson teaches torts, insurance law and regulation, evidence and products liability, and other courses. He is a past chair of the California State Bar Standing Committee on Insurance Law, and is director of the Law School’s Center for Insurance Law and Regulation.
Signe Redfield, Roboticist and Mission Manager; Naval Research Laboratory (NRL). Dr. Redfield’s primary interests include performance evaluation of autonomous systems, foundations of robotics, and cooperative behaviors for autonomous underwater vehicles.
Giorgio Rizzoni, Professor and Director of Center for Automotive Research (CAR); The Ohio State University. The CAR is an interdisciplinary university research center that conducts research on advanced automotive and transportation technologies and systems engineering, focusing on sustainable mobility, advanced propulsion systems, human safety and the environment.
Steven Rogers, Senior Scientist for Automatic Target Recognition and Sensor Fusion; Air Force Research Laboratory (AFRL). Dr. Rogers serves as the principal scientific authority and independent researcher in the field of multi-sensor automatic target recognition and sensor fusion.
Registration is also now open for the ION International Technical Meeting (ITM) and Precise Time and Time Interval Systems Applications Meeting (PTTI), which begin the next day (January 30-February 1) at the same location. See www.ion.org/itm for more information.
Lear Corporation, a global supplier of automotive seating and electrical systems, has entered into a definitive agreement to acquire Israel-based EXO Technologies, a developer of GPS technology providing high-accuracy solutions for autonomous and connected vehicle applications.
EXO Technologies has operations in San Mateo, California, and Tel Aviv, Israel. Financial terms of the transaction were not disclosed.
EXO Technologies has developed core technology that addresses the need for high-accuracy positioning in a vehicle. Its proprietary technology works with existing GPS receivers to provide centimeter-level accuracy anywhere on the globe without the need for terrestrial base-station networks.
EXO Technologies offers a software-based GPS approach — PICO pinpoint positioning software — that enhances GNSS receivers. By correcting satellite orbit error and clock error, it eliminates the inherent error sources within navigation messages. Its algorithms reduce complementary errors and construct a full positioning solution.
The integration of EXO’s technology with Lear’s vehicle and connectivity expertise will enable a superior vehicle positioning solution, the companies say.
“EXO has developed technology that is essential for the future of connected and autonomous vehicles,” said Nuri Golan, EXO co-founder and CEO. “We are extremely excited to join the Lear family where we will provide unparalleled solutions for vehicle-to-vehicle, autonomous driving and other applications.”
“Lear is a leader in automotive connectivity solutions including Vehicle-to-Vehicle and Vehicle-to-Infrastructure communications,” said Matt Simoncini, Lear’s president and chief executive officer. “The acquisition of EXO Technologies will provide Lear with a differentiated technology to significantly improve GPS accuracy and reliability, thereby enhancing vehicle safety and enabling autonomous driving.
“The combination of EXO Technologies with Lear’s existing resources further strengthens our connectivity capabilities,” Simoncini said. “We see excellent growth opportunities for our E-Systems business as the proliferation of connected and autonomous vehicles will drive increased demand for improved accuracy and reliability in vehicle positioning.”
Tampa, Florida, took a big step toward its goal of becoming a smart city on Nov. 13, when the Tampa Hillsborough Expressway Authority (THEA) hosted its first public demonstration of connected car technology.
THEA plans to equip 1,600 privately owned automobiles with connected vehicle technology by mid-2018 as part of the Tampa Connected Vehicle Pilot.
In the project, volunteers’ automobiles will be equipped to communicate with downtown traffic and pedestrian signals to enhance safety, improve traffic flow and reduce emissions of greenhouse gases. Ten buses and 10 streetcars will also be equipped.
Tampa is one of three sites deploying the technology as part of the U.S. Department of Transportation’s Connected Vehicle Pilot Deployment Program. The other two sites are New York City and the Interstate 80 corridor in the state of Wyoming. Tampa’s project is the only one that involves local residents driving their own cars.
THEA is now recruiting volunteer drivers and pedestrians for the Tampa Connected Vehicle Pilot. Participating drivers commuting on the equipped expressway will receive a warning when traffic backs up, or when approaching a curve at an unsafe speed. Drivers who near pedestrians in certain crosswalks also will receive alerts.
Pedestrians will be able to participate in the pilot by installing an app on their smartphones that will enable them to request a “walk” signal at certain intersections, and issue audible alerts if a bus or streetcar is moving nearby.
Enabling the future of autonomous transportation by significantly reducing product development time is the shared goal of three presentations to be made on Thursday, Nov. 30 in a free webinar, “High Accuracy for Autonomous Driving.”
The speakers will show how they employ post-processing software to generate accurate and reliable ground reference solutions in vehicle testing. The software enables evaluating potential sensor suites, benchmarking solutions, and generating high-definition maps.
Post-processing the data from autonomous vehicle tests under varying environmental conditions that mirror real-world situations can mitigate GNSS error sources (satellite clock & orbital error, and ionospheric & tropospheric delay); establish an ultra-precise ground truth reference for testing; compare and contrast different sensor packages tested onboard the vehicle; produce customized data formats for exporting information; compare real-time and post-processed quality; transform and translate data between different locations and reference frames; and revisit tests through export to Google Earth. The speakers will show how post-processing forward and back can lead to as much as 40 percent data accuracy improvement.
The software package, Inertial Explorer, offers this capability, whether lower-grade or high-end inertial sensors are employed.
Steven Waslander, associate professor at the University of Waterloo, heads a project collecting 1,000 km of data in all-weather conditions for a new public road driving dataset focused on autonomous driving challenges. He directs the Waterloo Autonomous Vehicle Laboratory (WAVELab), extending the state of the art in autonomous drones and autonomous driving through advances in localization and mapping, object detection and tracking, integrated planning and control methods and multi-robot coordination.
Terry Lamprecht, director of products at AutonomouStuff, a supplier of components, services and software that enable autonomy, will discuss verifying proper installation, and creating a baseline data set to benchmark against data collected on autonomous vehicles in real-time.
Natasha Wong Ken, product manager at Waypoint, will give a high-level technical overview of post-processing techniques and settings, including forward and reverse processing, tightly vs. loosely coupled, PPP vs. differential, and more.
Registration for the November 30 webinar is free. For those not able to attend the live broadcast, all audio and presentation slide components can be downloaded after air date for viewing at convenience.
Assessing the performance of autonomous systems under real-world conditions requires an ultra-precise ground truth reference against which to benchmark vehicle performance. A GNSS-plus-inertial post-processing software can provide this capability, taking real-time GNSS data — which are subject to outages, obstructions, weather-induced errors and more — from the vehicle and correcting the solution. This can improve meter-level data to centimeter-level, a critical standard for safe autonomous performance. A free webinar on Nov. 30 gives both a high-level overview and close-in details of this process.
Many sub-systems must function flawlessly and interact seamlessly for safe autonomous vehicle performance. Fielding such a vehicle requires rigorous testing, repeated many times; this in turn requires close comparison of the vehicle’s real-time GNSS data to a ground truth of its performance. Post-processing software that combines GNSS with inertial navigation system (INS) data, to bridge GNSS outages common in real-world driving, can provide this capability. Whether the tests are evaluating potential sensor suites, benchmarking their own solutions, or generating high-definition maps, post processing maximizes the accuracy of the solution by processing previously stored GNSS and INS data forward and reverse in time, and combining the results.
Novatel’s Waypoint software package, Inertial Explorer, offers this capability, whether lower-grade or high-end inertial sensors are employed. An examination of the process is afforded in the free webinar, from the converging viewpoints of three speakers:
Steven Waslander, associate professor at the University of Waterloo, heads a project collecting 1,000 km of data in all-weather conditions for a new public road driving dataset focused on autonomous driving challenges. He directs the Waterloo Autonomous Vehicle Laboratory (WAVELab), extending the state of the art in autonomous drones and autonomous driving through advances in localization and mapping, object detection and tracking, integrated planning and control methods and multi-robot coordination.
Terry Lamprecht, director of products at AutonomouStuff, a supplier of components, services and software that enable autonomy, will discuss verifying proper installation, and creating a baseline data set to benchmark against data collected on autonomous vehicles in real-time.
Natasha Wong Ken, product manager at Waypoint, will give a high-level technical overview of post-processing techniques and settings, including forward and reverse processing, tightly vs. loosely coupled, PPP vs. differential, and more.
Registration for the November 30 webinar is free. For those not able to attend the live broadcast, all audio and presentation slide components can be downloaded after air date for viewing at convenience.
Some of the new capabilities explored jointly by NovAtel and AutonomouStuff are covered in the August cover story, Autonomous Assembled.