The Maricopa County (Arizona) Department of Transportation (MCDOT) has selected connected-vehicle technology specialist Cohda Wireless to support delivery of its Connected Vehicle Acceleration Zone (CVAZ).
The CVAZ is a USDOT-backed deployment designed to accelerate interoperable vehicle-to-everything (V2X) technology across key corridors in the county. CVAZ forms part of the Federal Highway Administration’s “Saving Lives with Connectivity: Accelerating V2X Deployment” program, which is supporting national models for connected vehicle deployment in Arizona, Texas and Utah.
The Maricopa County project will rely primarily on 5.9 GHz communications and is expected to connect up to 750 physical and virtual roadside units with 400 onboard units across transit, emergency response and freight fleets.
An MK6 Road-Side Unit being mounted to traffic infrastructure. (Credit: Cohda Wireless)
The deployment will support emergency vehicle pre-emption, vulnerable road user alerts, transit signal priority and freight signal priority in Phoenix, Tolleson, Avondale and unincorporated Maricopa County, as well as along ADOT’s US 60 highway.
Together, these applications are intended to help emergency vehicles move more efficiently through intersections, improve transit reliability, reduce freight delays and provide earlier warnings around pedestrians and cyclists.
Following its selection as a vendor, Cohda is contributing technical expertise in testing and deployment planning to support delivery of the CVAZ application zones. Under the project, Cohda will supply MK6 Road-Side Unit (RSU) kits and MK6 On-Board Unit (OBU) kits across the CVAZ application zones.
The program is designed as a multi-vendor deployment. Cohda’s RSU and OBU platforms are positioned to integrate with the county’s selected roadside processing environment, helping reduce integration risk and support faster deployment.
As a result, new cars sold in the contiguous U.S. and Canada equipped with SiriusXM’s Gen8 satellite chipset will be able to receive RTX GNSS corrections, enabling high-accuracy positioning — a key component of autonomous on-road applications.
With the addition of the Trimble RTX Auto software library, any new vehicle that receives SiriusXM broadcasts with a Gen8 satellite chipset can leverage a positioning solution ideal for advanced driving assistance systems (ADAS), autonomous driving (AD) and vehicle-to-everything (V2X) applications.
Because the SiriusXM hardware is already installed in most new vehicles, automotive OEMs can avoid the cost of additional hardware to receive GNSS positioning corrections.
“We are excited to add Trimble RTX Corrections to our suite of Connected Vehicle services,” said John Jasper, senior vice president for SiriusXM Connected Vehicle Services. “By delivering this service over our satellite broadcast network, automakers can access relevant location correction data throughout the contiguous U.S. and portions of Canada to facilitate ADAS, AD and V2X applications without the need to access a cellular network.”
Trimble RTX is a trusted precise-positioning technology of choice for car manufacturers and their suppliers, and was the first solution adopted for production use in passenger vehicles. RTX technology is a critical component of General Motors’ Super Cruise™ system—the first hands-free driving assistance system for the highway. To date, Super Cruise and Trimble RTX have enabled over 5 million miles of hands-free driving on America’s roadways.
Designed for automotive applications, the RTX Auto software library is Automotive Safety Integrity Level B (ASIL-B) certified and developed using the Automotive SPICE process maturity framework (Software Process Improvement and Capability Determination – ISO 15504). The RTX network operation is certified according to ISO 20000 standards, providing further peace of mind for any industry deploying safety-critical applications. No other precise positioning solution offers the same level of performance, reliability, versatility and coverage worldwide.
Trimble RTX technology provides real-time, multi-constellation correction of GNSS observations to provide significantly more precise position estimates. Standard GPS signals can drift up to 25 feet, which could cause incorrect lane identification. When used in conjunction with high-definition maps, cameras, radar and inertial sensors, Trimble RTX provides lane-level positioning performance for semi-autonomous and autonomous vehicles.
“The alliance with SiriusXM provides an expansive distribution pipeline for Trimble RTX into new passenger vehicles,” said Patricia Boothe, senior vice president of Trimble’s Autonomy Sector. “OEMs now have an easy, cost-efficient alternative to bring high-precision GNSS into their vehicles. Together, Trimble and SiriusXM are helping to accelerate the adoption of real-time positioning in connected vehicles, ultimately supporting safety-critical V2X applications.”
A new map method opens up parking continuous-environment mapping for enhanced low-cost urban navigation. Collectively recorded context data by many identical platforms gather similar sensor readings when operating in a given area. Further processing integrates the data with a map and feeds the summarized results to a user.
ByIvan Smolyakov, Evgeny Klochikhin and Richard B. Langley
Complex, dynamic urban environments comprise millions of devices with localization capabilities. While GNSS remains a primary positioning tool, its performance is subject to significant degradation from blocked signals, multipath and non-line-of-sight (NLOS) signal reception. In aided navigation, a positioning filter with GNSS measurements integrates data from various sensors and correction streams to compensate for these disadvantages.
Low-cost platforms are limited with the variety and quality of sensors on board, as well as by processor performance and battery capacity. Positioning routines must be computationally light, energy efficient and make the most productive use of available data.
One new research area covers use of crowd-sourced GNSS data. Many vehicles now include some type of native wireless connection capability, which could be complemented by a designated third-party device.
The growth in connectivity brings an opportunity to access a stream of sensor data produced by a high number of devices operating in a localized urban area. Here, we explore the idea of creating a GNSS signal-strength map using the connected vehicle GNSS data stream and then use the map as statistical information for Kalman filter parameters tuning. This approach improves filter reaction to the environment and produces a positioning accuracy improvement.
SYSTEM ARCHITECTURE
C/N0 levels of reflected and diffracted signals are more likely to be lower than that of the LOS signals. We propose that the C/N0 level averaged during a given period among all satellites tracked in a given area would correlate with a higher probability of multipath-contaminated and NLOS signal reception.
A sufficient number of C/N0 readings associated with a given space-time cube should be collected to compute the statistics populating the signal-strength map. However, the city environment does not remain static: new construction occurs, traffic congestion shifts, and so on. Therefore, the C/N0 space-time statistics must be continuously updated in real time to reflect these changes. Additionally, the solution must be highly scalable as the market of connected vehicles is growing and so is the volume of the streamed data.
A recent advance in cloud-based data-stream processing, a data flow model treats an input data stream as something that will never become complete. A derivative of that model is Flink, an open-source framework capable of both unbounded data (stream) and bounded data (batch) processing, while treating bounded data as a special case of the streaming applications.
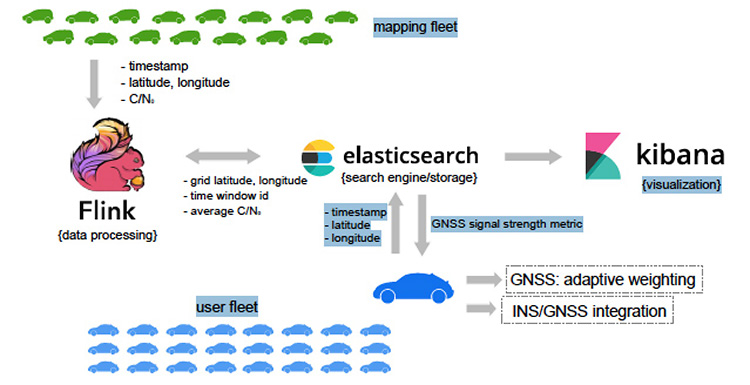
We use Flink as a core library for the environment mapping architecture as it fits the needs of event-time processing while being a highly scalable solution. The processing enables calculating necessary statistics based on a moment of time a reading occurred rather than based on a moment of time the reading arrived at the cluster. The proposed system architecture is presented in Figure 1.
The connected vehicle mapping fleet transmits packets of the GNSS receiver readings via cellular Internet connection to the server at 1 Hz. Each packet contains a timestamp in the UTC time system, the geographic coordinates determined by the proprietary positioning algorithms of a connected vehicle, and the C/N0 measurements per each tracked satellite.
The geospatial processing block calculates the average C/N0 metric among the readings of a given space-time cube. Computed statistics are sent to Elasticsearch, updating the map in real-time. Elasticsearch is an open-source, distributed search and analytics engine integrated with Kibana, an open-source data visualization tool. User platforms request the average C/N0 metric from the search engine with their UTC timestamp and coordinates and apply it in the processing filter.
PILOT PROJECT
The system is currently in prototype. Collection of the data populating the map was performed with two positioning boards designed by Parkofon Inc. and installed on the dashboard of a vehicle (Figure 2).
Figure 2. Mapping setup: Parkofon board is installed on the dashboard of a vehicle. (Image: Authors)
Lack of a high number of vehicles for the data collection campaign was compensated with an extensive piloting time (17 hours, 43 minutes) in a limited area, driving the same roads repeatedly. Two areas of New York City were the subject of extensive mapping.
Tests concentrated on two sectors with different GNSS signal strengths: sector A, a relatively open-sky area; and sector B exhibiting deep urban canyon conditions. The mapped average C/N0 is denoted as .
The of the less obstructed sector A = 39.3 dB-Hz, while that of the more obstructed sector B is lower: 18.1 dB-Hz. This tendency is repeatable throughout the surveyed area and allows for further GNSS signal-strength map integration into the algorithms at the user side.
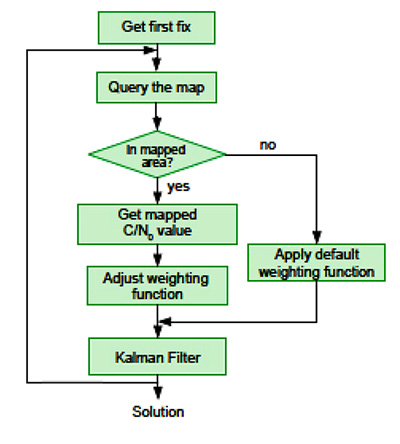
It is a challenge to find an optimal set of urban navigation filter parameters, as the signal obstruction environment changes significantly with the moving positioning platform. Our approach adjusts parameters of the GNSS observation weighting function with respect to the retrieved from the map. The algorithm scheme appears in Figure 3.
When the first position fix is obtained, the algorithm sends a request to the server with the timestamp and the coordinates determined at the previous epoch. If one is available in the current user area, the server response includes the metric retrieved from the GNSS signal-strength map. Next, the GNSS observation weighting function is adjusted according to equations given in the full technical paper (see Acknowledgment section).
PRACTICAL RESULTS
Algorithm performance was evaluated by analysis of the distances between the coordinates calculated with our engine and the centerline of the road in two downtown and two residential areas. For an estimated 86 percent of the track, our proposed map-aided weighting performed better than when the default weighting function was applied during the whole track.
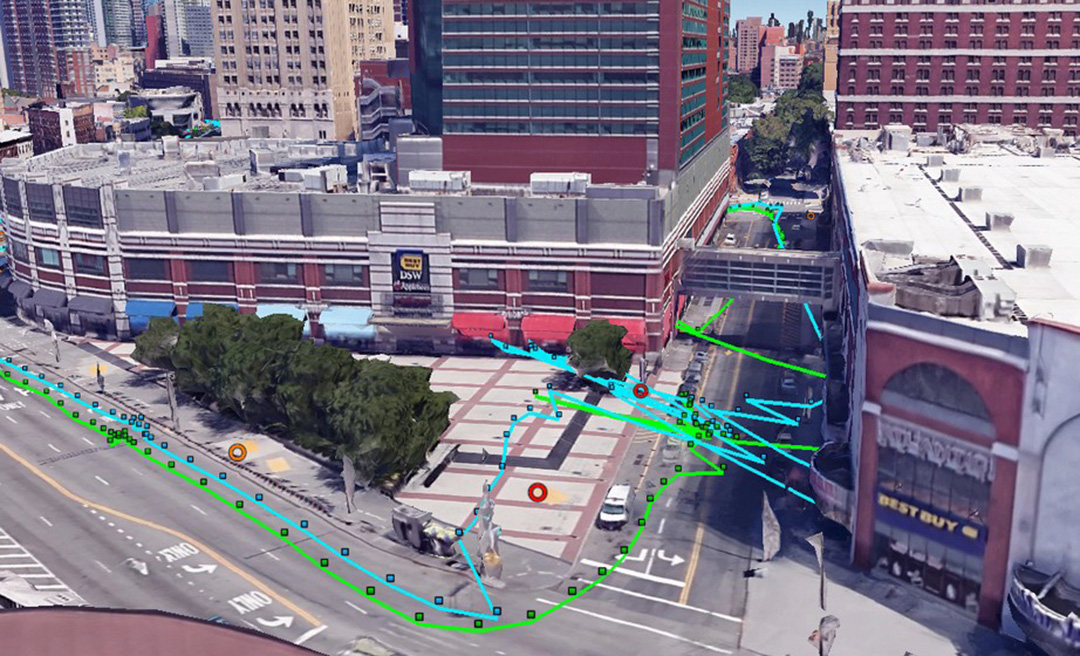
The map-aided weighting of the observations brings approximately 25 percent and 35 percent accuracy improvement in the dense urban area and in the intermediate residential environment respectively. Additionally, there were instances of faster solution re-convergence when fix was lost due to insufficient number of the satellites tracked in narrow streets or under obstructions (see Figure 4).
Figure 4. Example of faster map-aided solution re-convergence. (Image: Authors)
FUTURE WORK
For the mapped average C/N0 levels to be unbiased, normalization procedures must be implemented. This would soften or eliminate hardware constraints on the mapping fleet and facilitate its growth. With more data available, the temporal discretization of the map needs to be implemented as satellite geometry and multipath environment change throughout the day.
Optimal dimensions of the mapped space-time cube remain an open question: more real-world data needs to be collected to provide better mathematically-derived estimations. We plan to investigate the benefits of a variable-dimension space-time cube with respect to the area and the mapping fleet density. We also plan to extend the environment map-aided filter tuning to a multi-constellation GNSS approach integrated with inertial navigation systems and other sensors.
The technique is commercially implemented in Parkofon, a fully automated parking payment and guidance system that helps people find cheaper, safer and easier parking. The platform includes a mobile app and device placed in the car to guide drivers to open parking spaces in real time and charge them only for actual time parked in designated garages. Parkofon also offers real-time on-street space availability.
Acknowledgments
This article draws on a paper presented at ION GNSS+ 2018. For the full paper, see www.ion.org/publications/browse.cfm. Research is supported by the Natural Sciences and Engineering Research Council of Canada.
MANUFACTURERS
Experimental datasets were collected with a Septentrio AsteRx-m2 receiver and Maxtena M1227HCT-A2-SMA antenna. Parkofon boards carry a u-blox M8N receiver module and a Taoglas CGGBP.25.4.A.02 patch antenna.
IVAN SMOLYAKOV is a Ph.D. student in the Department of Geodesy and Geomatics Engineering at the University of New Brunswick (UNB).
EVGENY KLOCHIKHIN is CEO of Parkofon Inc., a smart mobility company utilizing the Internet of Things to guide drivers to open parking. He holds a Ph.D. in Public Policy and Management from the Manchester Business School, UK.
RICHARD B. LANGLEY is a professor in the Department of Geodesy and Geomatics Engineering at UNB.
Columbus, Ohio, has positioned itself smartly for an autonomous future, taking a lead role in pilot projects on infrastructure and autonomous air and road transport.
The city will draw on up to $40 million in grants from the U.S. Department of Transportation, $10 million from Vulcan, Inc,. and $500 million in local private pledges.
Carla Bailo, assistant vice president for mobility research and business development at Ohio State University (OSU), presented the city’s ambitious program at ION GNSS+.
In “Position, Navigation and Timing — An Enabling Technology for Mobility and Smart Cities,” she focused on a triple-zero target: zero accidents and fatalities, zero carbon footprint and zero stress.
Smart Columbus will put six autonomous shuttle buses in the commercial district, coordinate truck platooning, time deliveries and manage parking to reduce congestion, and undertake drone delivery of medical supplies and other critical needs. Multimodal transit apps, mobility assistance for those with disabilities and pedestrian collision avoidance will be based on real-time data on transit options and availability, as well as traffic information, road and weather conditions.
Position, navigation and timing (PNT) technologies play a central role in smart cities: vehicle-to-vehicle and vehicle-to-infrastructure communication, autonomous navigation and collision avoidance, location-based services and smart, resilient infrastructure.
Smart Columbus envisions the city as a center for high-tech transportation research and innovation. OSU’s partnerships with mobility companies and vehicle manufacturers, industry groups and government agencies contribute to the city’s comprehensive approach to the smart city project. Through its expertise in sensors, communication, PNT, transportation, autonomous and connected vehicles, and geospatial science and engineering, OSU will serve as the lead researcher on Smart Columbus.
Dorota Grejner-Brzezinska, OSU professor and frequent contributor to GPS World, in her new role as associate dean for research at OSU’s College of Engineering will be a key participant in research projects on ways to integrate self-driving cars, deliver high-definition 3D maps and metadata, use sensors to better connect vehicles for safety and efficiency, and find better ways to move people around the city when they don’t have access to a car.
We asked major players in the connected vehicles marketplace for their views on expected deployment timelines, remaining challenges such as reliable positioning technology, integration with existing systems, and the implications on autonomous vehicle technology.
Curated and introduced by Chaminda Basnayake, Principal Engineer, Market Development, Locata Corporation
State of the Industry: Connected Vehicles
Intersection Movement Assist warns the driver if it is not safe to enter an intersection, for example, if another vehicle is running a red light or making a sudden turn. (Image: U.S. Department of Transportation)
The U.S. Department of Transportation (USDOT) released a Notice of Proposed Rulemaking (NPRM) in December 2016 for the deployment of Dedicated Short Range Communications (DSRC)-based vehicle-to-vehicle (V2V) safety applications as part of the connected vehicles (CV) and automated vehicles (AV) initiative. If all goes well, this mean a V2V deployment mandate for new passenger vehicles likely starting in 2021 and reaching all new vehicles within 2–3 years.
Standards required for V2V deployment were published in 2016 or before, including the V2V Minimum Performance Requirements SAE 2945/1, leading the way for commercial product development. The USDOT, which has been the catalyst behind V2V industry R&D starting from the automaker collaboration CAMP (Crash Avoidance Metrix Partnership) in 2001, is conducting CV Pilot programs in New York, Wyoming and Florida. These offer the opportunity for state DOTs, vendors and all other stakeholders to test the technology in real-life scenarios.
Automotive OEMs have been developing this technology for more than a decade, and the NPRM is the beginning of a race toward integrating V2V to production vehicles. Deploying V2V technology requires the close cooperation of OEMs, their suppliers and many other stakeholders.
The following transportation article captures the views of major players in the CV marketplace on expected deployment timelines, remaining challenges such as reliable positioning technology, integration with existing systems, and the implications on AV technology.
By Curtis Hay Technical Fellow, GNSS and Precise Maps, General Motors
General Motors is the first automaker to offer V2V technology in North America with the 2017 interim model year Cadillac CTS. These V2V-equipped vehicles share information to alert drivers of upcoming potential hazards. Cadillac’s V2V uses DSRC and GPS, and can handle 1,000 messages per second from vehicles up to nearly 1,000 feet away. For example, when a car approaches an intersection, the technology scans the vicinity for other vehicles and tracks their positions, directions and speeds, warning the driver of potential hazards.
GM continues to make technology investments in V2V to achieve greater global market volumes. We have been developing V2V technology for the past several years and are exploring potential enhancements to the V2V features currently offered. Nearly all global OEMs are developing V2V today, but market readiness, adoption and technology maturity vary greatly between regions and manufacturers. I expect other OEMs will begin to deploy V2V systems beyond model year 2017.
We believe that autonomous vehicles will require some level of connectivity — there is no way around this. V2I connectivity is required for precise map updates, emergency call alerts, GNSS corrections, remote diagnostics, traffic and weather updates, and many more applications — both existing and emerging. V2V communication will also be an important technology to improve safety and reliability as autonomous vehicles become more broadly deployed.
As a technical challenge, the limitations of GNSS are certainly understood by automakers for applications such as vehicle navigation, stolen vehicle tracking and emergency response services. Many recent advances in vehicle positioning technology mitigate the effects of urban multipath and poor sky view. These include higher quality micro-electro-mechanical systems (MEMS) sensors, low-cost lidar, visual inertial odometry, wheel encoders, precise maps and more GNSS satellites in view.
We believe that high-confidence lane classification is becoming possible even in dense urban environments, thanks to these and other advancements. Infrastructure augmentation will certainly help, and these investments are gradually being made by state and local governments. However, technology development occurs at a faster pace inside the vehicle versus along our roadways.
There is growing demand for low-cost, high-quality automotive cameras and radar components that will be critically important for CV and AVs. I expect some degree of sensor data sharing over V2V will enter the industry within a 4–5-year time frame. Today, not all automotive cameras are designed to provide real-time video output across a high bandwidth interface such as low-voltage differential signaling (LVDS).
Furthermore, DSRC protocol and LTE Release 14 are not yet broadly accepted among competing OEMs. V2V innovations will occur as OEMs see what is possible, and customer demand for safety and reliability increases. Once the auto industry has passed the 50% milestone for market penetration of V2V vehicles, the rate of adoption will be much higher for new vehicle builds.
Denso’s autonomous vehicle research and development ranges from head-up display to voice recognition and human machine interfaces.
As we know, GM offers V2V in the current model year CTS, and Toyota deployed ITSConnect in Japan in 2016. So, multiple OEMS have cars on the road and appear to see the value of V2V.
A retrofit V2V, a universally acceptable U.S. National Highway Traffic Safety Administration (NHTSA)-compliant solution that could be installed at a dealership, is an interesting concept that has been around in recent years. This will allow OEMs to comply with the rule much quicker. However, that concept is easier said than done, and it hasn’t been the focus of the industry up until now.
I see connectivity as nearly a requirement to get to highly AV in the future. On a limited-access highway, connectivity is probably not a requirement, as there are predictable and infrequent “high anxiety” encounters. In an urban setting, however, many other elements complicate the necessary behavior and reaction; and therefore I see the most value from connectivity.
Sensors such as cameras can detect the state of a traffic light with some level of certainty, but often the situation is complicated, such as the need to differentiate between a straight versus a turn signal. Even in highway scenarios, we can see how connectivity can favorably impact use cases like truck platooning and cooperative automated cruise control.
For positioning, it may be that a terrestrial solution will be necessary in difficult GNSS environments such as New York. It’s clear traditional GNSS is not capable of performing at the level required for the cooperative crash avoidance capability that NHTSA desires. Ranging systems that operate as a part of V2I and high-definition maps with lidar could be potential augmentations. I can relate the latter to how humans drive: Although we are not aware of our position, we can certainly drive in Manhattan (with difficulty!) by observing lanes, curbs and other relative
I envision V2V as part of a typical in-vehicle sensor suite at some point without exception; vehicles will eventually communicate what they see with their sensors to others via DSRC. Denso holds a patent that proposes to use on-board sensing to detect the presence of unequipped vehicles and send a proxy basic safety message (BSM) to other vehicles through DSRC.
In the V2V NPRM, NHTSA defines benefits in terms of lives saved under full penetration, but we believe benefits can be shown under much lower levels. For example, in the Ann Arbor Safety Pilot, even with under 5% penetration, anecdotally the University of Michigan buses averaged about one warning every 150 miles during the trial, a significant number of warnings.
By Roger C. Lanctot Director, Automotive Connected Mobility, Strategy Analytics
We think the best-case U.S. V2V deployment scenario might be 2021 — but given the challenges in security management, the ongoing testing of spectrum sharing by the Federal Communications Commission (FCC), and the lack of infrastructure support — we think an even later commencement is likely. This means that early 5G deployments will already be beginning.
It is worth noting that the NPRM provides for alternative technologies as long as the performance requirements are met. The interest in DSRC in Europe has waned significantly, and Toyota appears to be the only company aggressively investing in Japan. China appears to be heading towards 5G for V2X.
In our view, given the vast uncertainties, it makes little sense to proactively add a box that will add cost along with driver distraction and security vulnerabilities. Vehicles will benefit from connectivity regardless of the technology used, but many more miles must be driven before a level of sufficient confidence is reached to integrate V2V with safety systems.
We believe DSRC-based V2V is decades away from delivering a reliable and warrantee-able or life-saving value proposition. Even NHTSA has suggested it may take as long as 20 years before significant value is returned to the manufacturers, let alone the consumer, making the investments today.
We do not think the industry is prepared to integrate safety systems with V2V for a broad range of reasons — GNSS vulnerabilities in urban canyons being one of them. This is the scenario in which additional sensors and high-definition maps can add to location accuracy. Details not only on the road, but also on the location and geometry of buildings, trees, street furniture and more can be gathered by sensors during the mapping process. The vehicle camera and/or lidar sensors can then be used to position the vehicle against this map.
We think a base map will be generated by the mapping entity using vehicles equipped with high-quality sensors and location technology, and then this will be updated by user-gathered data, as well as continued use of the mapping vehicles. This is the approach taken by the likes of TomTom, Mobileye and Civil Maps.
Cellular networks are de facto infrastructure assistants today, and we expect those capabilities to be enhanced. Connectivity is a nice-to-have for AV — not necessary. With the onset of 5G this will change a little bit, but AVs will always have to be able to operate without a connection, in our opinion.
Connected Car a Critical Stepstone to Automated Vehicle and Driverless Driving
By Jonathan Auld
Director, Safety Critical Systems, NovAtel Inc.
I think some OEMs and Tier1s will integrate the technology in advance of the full mandate and thereby reduce the time to widespread adoption. The benefits of V2V may not be fully realizable at first, but will increase as more equipped vehicles and infrastructure becomes available.
It’s a false assumption that any one technology will resolve CV or AV positioning challenge. The challenging environments and user expectations for high availability and safety will require multiple sensors and systems.
In this context, we see the CV as a critical stepping stone to the AV. CV provides a critical link for V2V communications in low/no-visibility/hidden-object situations as well as a pipe for critical mapping and road network information to the car. As part of this, the GNSS receiver plays a role in being an all-weather absolute position and time reference that can tie all the other sensors together. GNSS has its limitations, as do other sensors, which leads to the multi-sensor fusion approach for accuracy, availability and safety.
The automotive industry’s understanding of GNSS performance is largely driving from the perspective of L1-only single- and dual-constellation receivers. In both the CV and AV use cases, there is a push for more accuracy from GNSS. When moving to a higher performance expectation from GNSS, issues come up that are new to the automotive industry.
For consistent sub-meter-level performance, we start to consider multi-frequency receivers with correction/integrity services supporting them. This is where we see PPP (precise point positioning) as a key technology. Taking advantage of our global PPP correction network for corrections, authentication and safety services will make this performance possible. Also, antenna quality and location become more important. In urban environments where GNSS is less available, we expect a multi-sensory solution to aid GNSS through outages, but still keep lane-level performance as long as possible and safe.
Given the significant challenges on the automotive environment, I would expect that new and innovative ways of gathering and sharing additional information between vehicles and the infrastructure will be developed. It’s entirely feasible that future systems will share as much data as is practical, with the cloud to allow for better map generation and data dissemination. All of this will be driven by the need to keep the systems as available as possible while still maintaining safety.
Dual-Band Carrier Phase for Lane Position
By Rod Bryant
Senior Director, Positioning Technology, u-blox
We expect to see early adopters integrating the technology ahead of the mandate in selected models such as GM with Cadillac-CTS planned for this year. Depending upon the applications to be supported, DSRC fleet penetration of over 70–80% is probably needed for it to become a truly all-round sensor. That’s why the forthcoming legislation in the U.S. is so important for solving the chicken-and-egg problem, as well as the development of aftermarket V2X.
The combination of CV safety applications with features that use in-vehicle sensors would be a natural evolution. Sooner or later every vehicle will be able to see what others see.
For Level 4 AV systems, GNSS is needed to unambiguously identify the road segment. Highway pilot should not be used off the highway; for lane-accurate positioning with integrity on the urban highway and main roads, we are using dual-band carrier phase positioning with wide area State Space Representation (SSR) corrections and automotive-grade INS. This combination of technologies can cope with the level of interruptions to carrier phase lock and the multipath distortion caused by bridges, signs, trees and buildings in such environments.
As we move deeper into the urban canyon, additional measures will be needed. More advanced multipath mitigation, terrestrial ranging and beamforming techniques could contribute to the solution. V2I ranging is a particularly attractive and obvious example. However other ranging sources could also be utilized. Various beamforming approaches are possible with various levels of disadvantage regarding the accommodation of antenna arrays into the car.
Inevitably, there will be periods of unavailability of GNSS-based lane-level accurate position deep in the urban canyon when required protection limits cannot be met within the required level of integrity risk. It is essential that these are managed properly in the reliance on different sensors at different times and, for lower levels of autonomy, in the interactions between machine and driver.
We see automated driving as a related but separate evolution. The crux of the automated-driving problem is how to manage risk in such a complex scenario. Multiple sensors are being used by OEMs to determine the position of the vehicle with respect to roads and for collision avoidance. Those sensors include GNSS/IMU, radar and lidar, which have overlapping capabilities across conditions. This allows the decomposition of the Automotive Safety Integrity Level (ISO26262 ASIL) requirements.
A combination of all of these sensors is required to meet the stringent safety goals. In that context, V2X will clearly play a role, but may not be seen as a prerequisite. The cooperative nature of V2X operation presents challenges for the application of functional safety methodologies like ISO26262. Partly for that reason, we do not expect the application of V2X to autonomous driving before 2025.
Azuga’s Fleet Driver Rewards App Wins CTIA E-Tech Award
Ananth Rani founded Azuga in 2013.
When Ananth Rani began work in 2012 on the Fleet Driver Rewards app that has made connected vehicle provider Azuga a CTIA up-and-comer, he wasn’t sure he was making the right decision.
“Frankly, it was a bit of an experience to see if there was still room in the market for another vendor,” he said recently as he took time to sit-down at a coffee shop in Las Vegas’ Sands Expo Center amid CTIA Super Mobility 2015. “I thought, ‘What the hell am I getting myself into?’”
The gamble paid off for the Azuga and its dedicated co-founder. Azuga’s app took home second place in the Mobile Cloud division at the CTIA E-Tech Awards Thursday. The honors go to what CTIA describes as “the most innovative emerging mobile services, solutions and technology from areas such as the cloud, network equipment, M2M and the Internet of Things.”
What makes Azuga’s app innovative says Rani, is that it appeals to a unique user: The fleet driver.
Not just managers. Not just owners. The drivers themselves.
“Azuga is all about social telematics,” he says. “It comes from the heart. I tell fleet managers, ‘Do you want to be remembered as a gotcha guy or an attaboy?’”
A Silicon Valley veteran, Rani utilized a principal more likely to be seen in apps marketed to consumers: gamification. Fleet drivers earn points based on things like hard-braking, acceleration, sustained high speeds and driving in adverse weather conditions, among other metrics determined by a Ph.D. in statistics that Azuga has on staff.
“The expectation was that a driver will naturally move toward a safer fleet by competing with the rest of the drivers, and that as the risk goes down the miles per gallon goes up,” Rani said, “and that’s your ROI.”
The reward for winning is no simple badge: Drivers’ profiles are pulled from LinkedIn and their rankings are visible among the “Azuga Awesome Drivers” group on the social network. Rani says Azuga is “not J.D. Power” but aspires to have the same reputation for determining safe drivers.
Azuga Fleet Driver Rewards can gift a reward as a donation to groups like World of Children.
There’s also cash on the line. The company gives out quarterly prizes to the Top 10 drivers and Top 10 fleet managers of the 50,000 nationwide users, and the 1,000+ corporate customers can then also choose to award their drivers based on their own goals through an electronic gift card program that is tied to 14 national brands, including Amazon, Wal-Mart, Home Depot and Burger King. The driver sees the amount awarded and then has the choice of gift cards. Azuga has also recently added three charities to which the drivers can pass the reward as a donation.
Safety and savings aside, employee retention is an additional
“This is a blue collar world where the employee takes the truck home at night. Feeling engaged is the key to employee retention in a world where they may never see the boss and where they only see their manager for a meeting every few weeks.”
Azuga’s OBD-II connector is manufactured by parent company Danlaw Inc.
Azuga pairs with hardware manufactured by its parent company, Michigan-based Danlaw Inc. Rani sees the relationship as one that benefits Azuga with the “automotive grade DNA” and calls it “Silicon Valley meets Detroit.”
Azuga Fleet costs 69 cents per day per vehicle, and customers are companies of varying sizes with Aaron’s, the rental furniture and home appliances chain, using it for 3,000 trucks and 6,000 drivers on the large end and single-driver landscape companies at the small end.
Growth plans for the app including functions to help drivers find parking, locate a parked truck and easily message clients that they are on their way. The app is also being reviewed by state governments as a tool to determine whose cars need to be emissions-tested and to track hours required for state graduated driver licensing.
It’s currently being tested by the Oregon Department of Transportation as a way to assign a road usage charge that funds highway repairs. The topic is politically divisive, with opponents saying replacing the gas tax with a per-mile fee is inequitable and subsidizes gas-guzzlers and advocates saying it will lead to safer roads and is an easier, faster alternative to tolls. The din doesn’t concern Rani. He says the intent is the same that inspired the fleet management app.