Focal Point Positioning, a U.K.-based developer of GNSS-enhancing software, has launched Precise+, a technology designed to deliver reliable high-precision positioning in environments where conventional carrier-phase tracking struggles. The company unveiled the technology at the 2026 European Navigation Conference in Vienna, Austria.
Precise+ extends the capabilities of the company’s patented Supercorrelation platform into the carrier-phase domain, targeting the cycle slips that can cause real-time kinematic (RTK) and precise point positioning (PPP) systems to lose lock in difficult environments.
Continuous carrier-phase lock is required for centimeter-level positioning. In dense urban areas, under tree cover and in multipath-heavy environments, interruptions can trigger cycle slips and force systems to reinitialize. According to the company, these disruptions remain a major obstacle for advanced driver-assistance systems (ADAS), automated driving and robotics applications.
Focal Point said Precise+ improves GNSS performance in challenging conditions, delivering sub-meter accuracy in scenarios where commercial receivers using live corrections typically produce multi-meter errors.
The company tested its software-defined Precise+ receiver in Thetford Forest, a common benchmark environment for GNSS testing under dense foliage. According to Focal Point, the system achieved 80 cm accuracy at the 99th percentile, meaning positioning error remained below 80 cm for 99% of measurements collected in the most difficult sections of the route. The company said competing state-of-the-art receivers produced errors greater than 3 m under the same conditions.
Focal Point noted the results were achieved using only receiver-level performance, without inertial sensors, dead reckoning or sensor fusion. The company said the improvements can be combined with additional technologies such as sensor fusion, RTK or PPP corrections.
“RTK and PPP deliver centimeter accuracy in open sky but degrade sharply where signals are disrupted by tree cover, buildings or multipath,” said Scott Pomerantz, CEO of Focal Point Positioning. “This limits deployment to a narrow slice of the road network, not the environments people actually drive in.”
“Meanwhile, correction services carry high recurring per-vehicle costs yet cannot fix what happens at the receiver when the signal environment degrades,” Pomerantz added. “This means OEMs pay for precise positioning that doesn’t function where it matters most.”
According to the company, Precise+ is designed for automotive applications including ADAS, automated driving and vehicle-to-everything (V2X) systems, as well as other applications requiring sustained high-precision GNSS performance outside open-sky conditions.
Crowded cities with stacked road systems and reflective architecture may offer impressive skylines, but for GNSS receivers, they create some of the harshest conditions on Earth. For technologies that depend on stable, trustworthy positioning, real-world testing in these challenging environments is essential. Here, Jez Ellis-Gray, product manager at Focal Point Positioning, a provider of GNSS positioning software, examines what recent field deployments reveal about the future of reliable GNSS.
Urban environments present unique constraints that no laboratory or simulation can perfectly replicate. A lab test may miss the thousands of variables that influence signal behaviour in a living, breathing city or a dense forest road. This matters most for automotive applications, where positioning must remain stable and trustworthy to support driver assistance and higher levels of automation. That is why we conducted field trials across Germany and Japan, evaluating FocalPoint’s S-GNSS Auto software running on STMicroelectronics’ Teseo GNSS receivers in challenging real-world conditions.
This testing demonstrated that GNSS performance in the real world is often determined not by peak accuracy under ideal conditions, but by the system’s reliability when satellite signals are distorted, reflected or partially obstructed.
This distinction — between accuracy and reliability — is becoming increasingly important for sectors where positioning plays a safety-critical role, including automotive.
Understanding the complexity of real environments
Germany’s combination of modern architecture and medieval street layouts made it a good place to test GNSS upgrades against standard technology. A city like Frankfurt offers a nice mix of glass facades, narrow streets and tall buildings – conditions that tend to create multipath interference.
During our recent field testing, conventional GNSS receivers frequently suffered from severe degradation of position accuracy when compared to a state-of-the-art ground truthing system. The standard receiver positions will often drift away from the travelled path, often through buildings or even onto parallel roads.
As accuracy deteriorates, the receiver can usually tell that the input information is poor, and output a warning for a larger estimate of error. This is a useful warning flag for AVs and allows for safe handover back to the human driver. However, in some cases, the reflected signals cause the miscalculation to be assumed correct. This “confident but wrong” GNSS is a much greater threat to autonomous driving, as the vehicle may make a dangerous decision based on this false information.
In contrast, the S-GNSS Auto enhanced receiver was able to maintain lane-level accuracy far longer, even in areas where intense reflections would normally overwhelm the satellite data. In multipath-heavy environments, S-GNSS on Teseo receivers showed an accuracy improvement of up to 4x. These findings reinforced our belief that, as automation increases, consistency and reliability will be more valuable than peak accuracy.
A navigation system that performs well on open motorways but struggles on urban roads will not scale safely to higher levels of vehicular automation. This is particularly relevant as the industry transitions from Level 2 to Level 3 autonomy, marking the point at which a vehicle takes full responsibility for the driving task in defined conditions, allowing the driver to disengage temporarily while the system manages safety-critical decisions.
This shift is expected to unlock significant commercial value. A 2023 report by McKinsey predicted that advanced driver assistance and autonomous driving features could generate between $300 billion and $400 billion in annual revenue by 2035, driven by software services and subscription-based functionality that depend heavily on reliable positioning. Unlocking this potential will depend on the next generation of vehicles having robust positioning systems, as users are unlikely to pay ongoing subscriptions to systems that repeatedly require human intervention or where safety concerns linger.
Japan: one of the world’s most challenging environments
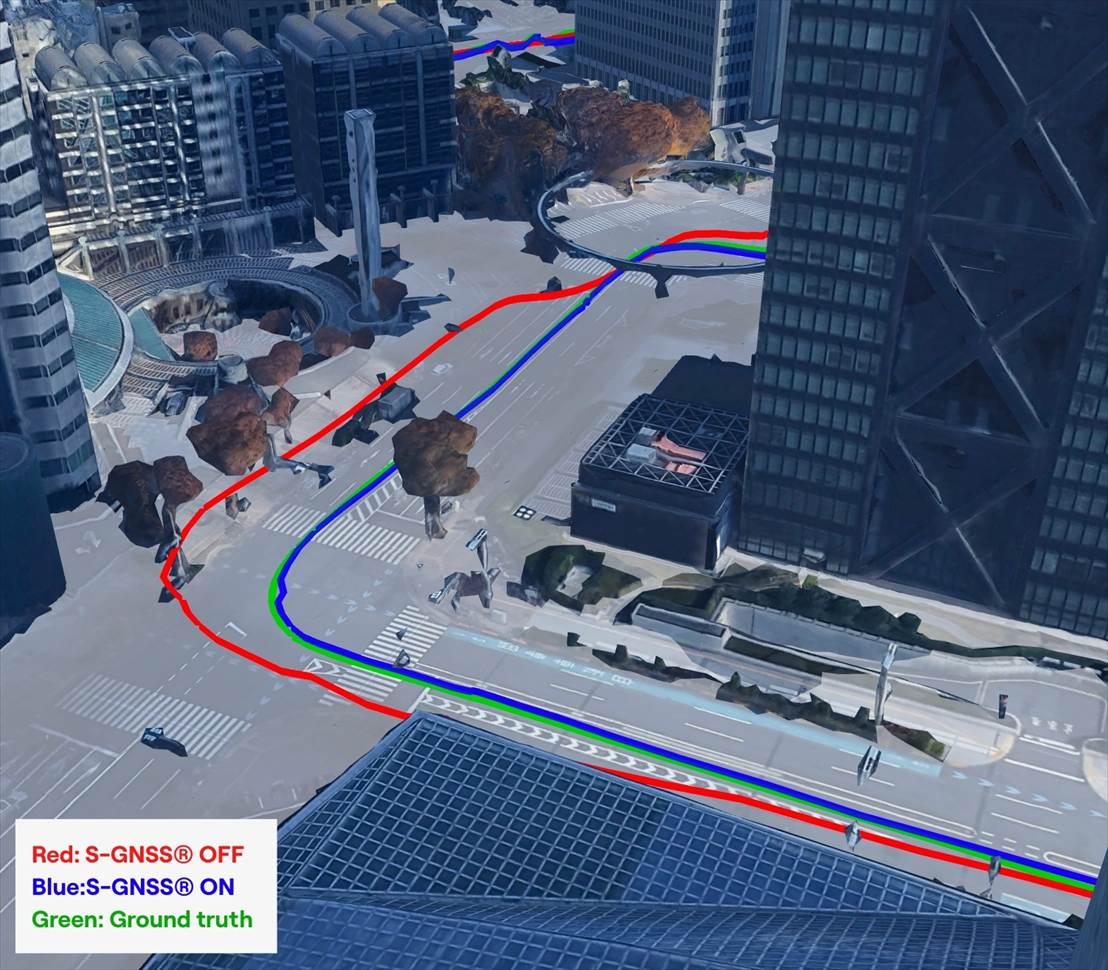
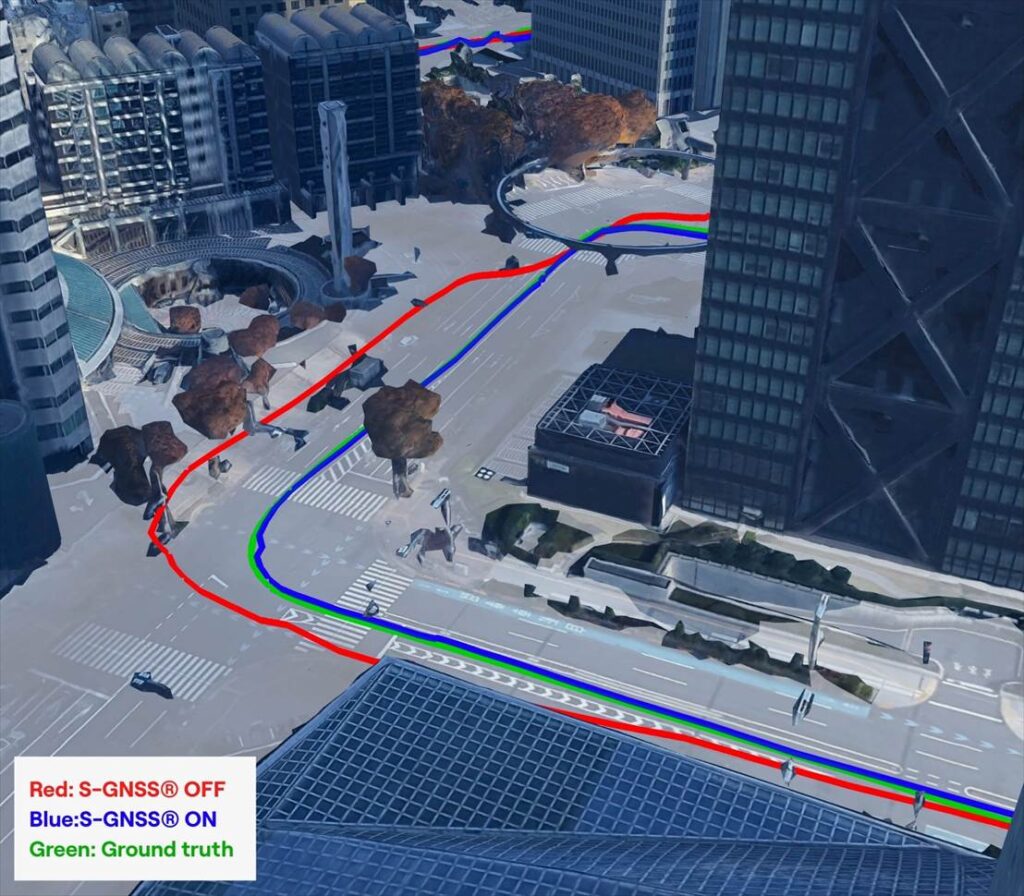
If Germany represents a demanding test bed, Japan pushes GNSS to the extreme. Tokyo offers some of the toughest conditions anywhere in the world due to its towering buildings, multilevel road networks and narrow corridors that create intense multipath environments, so it was a natural choice for our next field test.
The results showed that in particularly dense districts such as Shinjuku, standard GNSS receivers often struggled to maintain a coherent position solution. Reflections from glass towers, elevated highways and rail lines produced non-line-of-sight signals that overwhelmed conventional algorithms.
S-GNSS Auto, integrated onto STMicroelectronics’ Teseo receivers, demonstrating improvements in vehicle positioning accuracy. (Data from Shinjuku, Tokyo)
However, receivers equipped with S-GNSS’s advanced signal-processing techniques demonstrated significantly improved performance. These upgraded devices maintained a stable positioning where traditional systems faltered, avoiding errors that would cause an automated system to disengage or provide dangerously erroneous positions
This improved reliability has direct implications for safety and user experience, which vehicle OEMs will no doubt welcome. In driverless vehicles, GNSS problems that trigger sudden driver handovers or interruptions to hands-free modes, are likely to erode trust and reduce the likelihood of subscription renewals, as the end user will judge the product less by its peak performance and more by its dependability in everyday situations.
Field testing and the future of positioning technology
As cities evolve, buildings grow taller and mobility systems become more congested, the challenges facing GNSS will only increase. As such, automotive OEMs are rightly starting to demand real world results, not just in ideal conditions (static, open sky) but in the worst conditions.
Manufacturers increasingly recognise that positioning is now a foundational technology that underpins safety, automation and customer experience. Investments in more reliable GNSS systems are therefore not marginal enhancements but essential enablers of future services. For companies developing navigation and sensing technology, real-world testing offers a unique opportunity to understand how systems react to chaotic, imperfect environments. It provides granular insight into where and why positioning fails, and how these software-based enhancements can bridge the gap. By validating these solutions in the world’s toughest GNSS environments, developers can offer manufacturers greater confidence in deploying advanced features across global markets.
You can request an evaluation kit here or download the full results report of our latest testing here.
GNSS technology has had a reputation for unreliability in safety-critical applications, such as advanced driver assistance systems (ADAS). This perception has shaped automotive design and manufacturing: some ADAS developers have avoided GNSS altogether, instead relying on cameras, lidar and other sensors. Here, Manuel Del Castillo, VP of business development at Focal Point Positioning, explains how, with the right reliability, GNSS can offer a powerful layer of redundancy and support these other sensor types.
The hesitation to include GNSS in ADAS stacks is historical. Traditionally, this technology was unreliable, especially in dense, urban environments where satellite signals were obstructed. Consequently, many automakers turned to alternative sensors. For example, cameras can identify lane markings, traffic signs and objects, while lidar can build highly detailed 3D maps of the vehicle’s surroundings.
Each of these sensors provides important navigational data. However, they all describe a car’s location relative to its immediate environment. With no reliable source of absolute positioning, these relative measurements can’t confirm the vehicle’s exact place in the world — information that is critical for safe navigation.
Why ADAS Needs GNSS
Cameras, lidar and other sensors provide rich environmental data. However, they are limited by what they can directly observe. A camera can identify lane markings but can’t confirm which road the vehicle is on when multiple lanes or junctions overlap. Similarly, lidar can map obstacles in 3D, but without a wider frame of reference, it will struggle to anchor that map to the road network. HD maps provide another valuable layer, but without an accurate global position, they too can be misaligned with the real world, limiting their value.
GNSS can help plug this gap. By supplying absolute latitude and longitude, it ensures that the relative information from the other sensors is grounded in the correct location. GNSS helps calibrate and initialise other sensors, while also providing a cross-check against their measurements to detect potential errors or drift in sensor performance over time. Therefore, reliable GNSS is not an alternative to cameras, lidar or radar. It complements these sensors and boosts accuracy and the reliability of the overall system.
The Importance of Redundancy
Increasingly, the importance of GNSS in ADAS stacks is being recognised. As automotive production moves toward L3 automation and beyond, the demand for absolute positioning increases, along with the need for safe, layered sensing. GNSS, alongside cameras, lidar and radar, can help automakers improve navigational resilience without reinventing vehicular architectures.
Reliable GNSS isn’t about replacing other technologies. It is about reinforcing them. Having a global frame of reference helps ensure that the relative data from other sensors is grounded in the correct place. For automakers, the next step is recognising that GNSS can improve safety and trust in ADAS stacks, supporting the transition toward autonomous driving.
Advancing GNSS Reliability
Even with GNSS integrated into the vehicle’s sensors, challenges remain. Urban canyons and dense foliage can attenuate or even block satellite signals and create reflections, reducing accuracy. Since ADAS systems need reliably accurate absolute positioning, these challenges need to be addressed if we want GNSS to play a role in ADAS.
Newer, more sophisticated GNSS solutions are needed. The progression to Level 3 does not require an entirely new technology stack but rather extracting the very best from each of the existing components. For GNSS, this evolution involves implementing software-based solutions to achieve the necessary reliability improvements without overhauling hardware components. Pursuing cost-effective upgrades enhances performance without necessitating complete system redesigns, thereby keeping costs under control.
FocalPoint’s S-GNSS Auto software enhances GNSS accuracy in autonomous vehicles, providing reliable, absolute location to improve overall ADAS safety and efficiency. By boosting line-of-sight signals and rejecting non-line-of-sight signals, this simple firmware upgrade can help vehicles maintain accuracy in challenging environments.
By reducing positional uncertainty, these enhanced GNSS solutions strengthen the overall sensor stack. Together, these layers improve resilience, safety, and confidence in higher levels of vehicle automation.
As the automotive industry moves further towards L3 automation and beyond, reliable data on absolute position will be essential and will only reinforce the insights captured by cameras, lidar and other sensors.
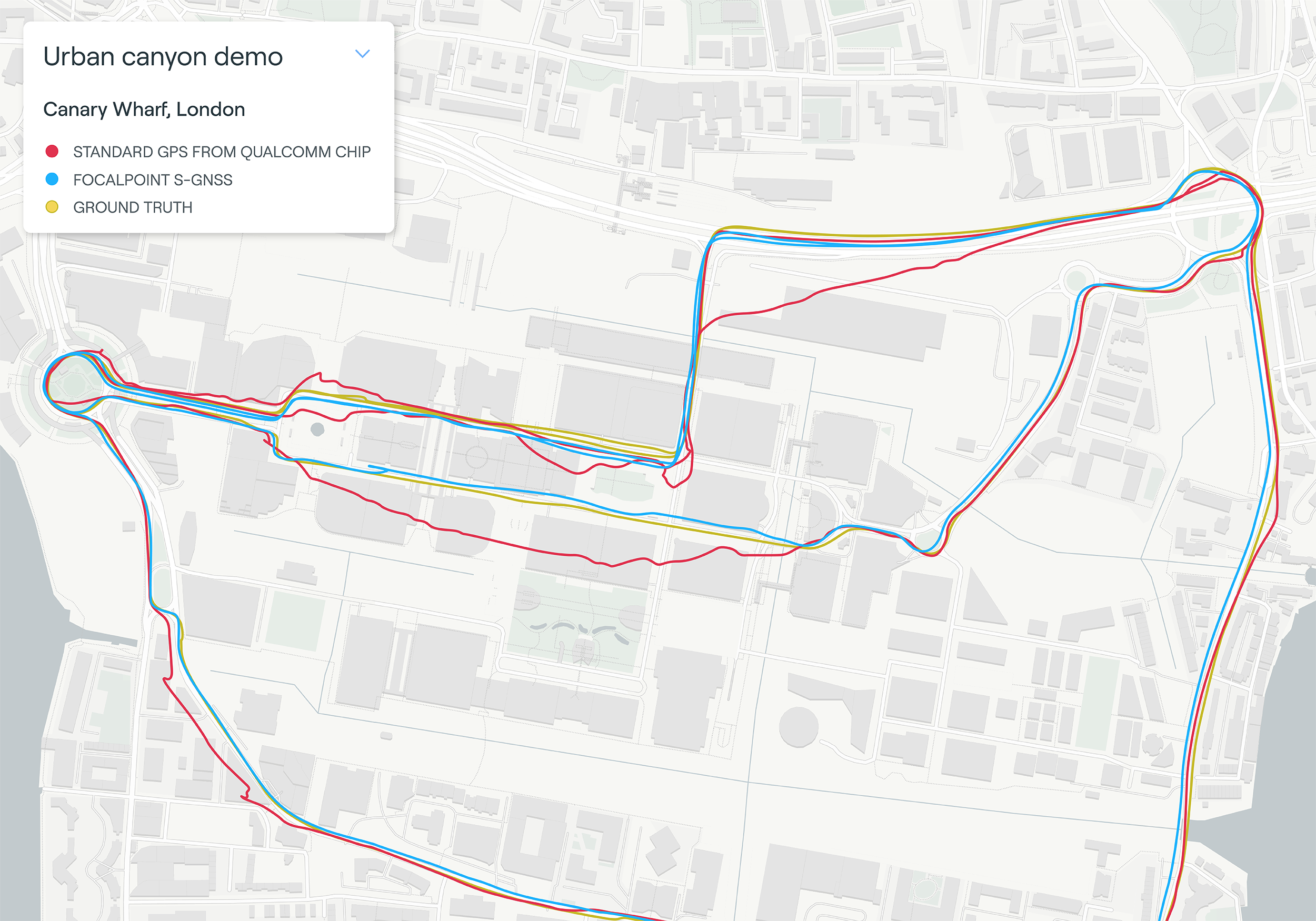
Map plot from live tests in London show the route of a vehicle driven through Canary Wharf. It shows the difference between the position provided by a standard smartphone GNSS chip (red line) and the same data run through Focal Point Positioning’s Supercorrelation software (blue line). (Image: u-blox)
U-blox has signed a deal with the award-winning U.K.-based technology company Focal Point Positioning to integrate technology that will improve the accuracy and reliability of GNSS devices. Focal Point’s Supercorrelation technology enhances positioning performance and security for applications such as smart cities, location-secure internet of things (IoT) and health and fitness wearables.
The patented Supercorrelation technology solves a critical weakness in GNSS caused by multipath interference. Multipath interference occurs when satellite signals bounce off buildings and landmarks, causing GNSS receivers to provide degraded positioning outputs.
The result for users is that the blue dot on their phone or device may be in the wrong place, moving in the wrong direction, or may have a large error ellipse. For autonomous vehicles it could lead to positioning errors that place the vehicle in the wrong lane or worse.
FocalPoint’s Supercorrelation technology uses software to detect and reject reflected signals, resulting in an improvement in the performance of GNSS devices without the need for additional hardware or applications. Supercorrelation also helps with the detection and rejection of GNSS spoofing signals — an increasing concern for autonomous vehicles, ships, and aviation.
“We are tremendously excited to be working alongside a market leader such as u-blox, our mission is to improve every positioning system on the planet and we have taken a giant step forward in that vision with this deal,” said Focal Point Positioning CEO Ramsey Faragher. “Positioning systems are so critical to our world, and we look forward to seeing the next generation of products and services that will be enabled by this higher level of accuracy, reliability and security.”
u-blox CEO Thomas Seiler commented, “The addition of Supercorrelation technology into our latest GNSS platforms is part of our continuing focus on low power consumption, higher accuracy and security for automotive, industrial, and wearable GNSS applications.”
On Sept. 19, in conjunction with the ION GNSS+ conference, GPS World hosted its annual Leadership Awards dinner. Five honorees — chosen by a panel of GNSS experts — were recognized for their outstanding recent contribution or achievement in four categories: Satellites, Signals, Services and Products.
SATELLITES AWARD: Presented by Johnathan Caldwell (left) to Mark Crews, both of Lockheed Martin. Crews accepted on behalf of Tim Hartman. (Photo: GPS World)
Satellites Award
TIM HARTMAN: Satellites Award winner
Tim Hartman, Chief Engineer, Military Space Programs, Lockheed Martin
Hartman was recognized for serving as the program manager for GPS IIRM and GPS III Space Segments. Tim’s leadership and program dedication helped support the U.S. Air Force’s decision to declare GPS III ready for launch on Oct. 17, 2017.
On Aug. 22, Lockheed Martin Space celebrated the successful launch of the second of up to 32 next-generation GPS III/IIIF satellites that the U.S. Air Force contracted the company to design and build. Lockheed Martin’s commitment to positioning, navigation and timing can be found in the exemplary performance of the 18 Lockheed Martin-built GPS IIR and IIRM satellites that are a proud part of today’s 31-satellite GPS constellation. The company also is proud to support the Air Force with its continued sustainment of the current GPS Operational Control Segment.
SIGNALS AWARD: Presented by Joe Rolli of L3Harris (left) to Ramsey Faragher. (Photo: GPS World)
Signals Award
Ramsey Faragher, Founder and CEO, Focal Point Positioning
Focal Point Positioning’s new supercorrelator approach to indoor and urban GNSS signal processing could revolutionize smartphone-based GNSS. New signal processing methods for the correlation stage of a GNSS receiver enable several seconds of coherent integration while the receiver is undergoing dynamic motions. This improves accuracy and integrity, and provides anti-spoofing and spoofer-localization capabilities — without hardware changes or requiring access to encrypted signals.
L3Harris Technologies is an agile global aerospace and defense technology innovator, delivering end-to-end solutions that meet customers’ mission-critical needs. The company provides advanced defense and commercial technologies across air, land, sea, space and cyber domains. L3Harris has approximately $17 billion in annual revenue and 50,000 employees, with customers in 130 countries.
SERVICES AWARD: Presented by Mike Shepherd of Collins Aerospace (back) to Simon Banville (front left) and Denis Laurichesse. (Photo: GPS World)
Services Award
Denis Laurichesse, Navigation Systems Department Expert, Centre National d’Études Spatiales (CNES)
Simon Banville, Senior Geodetic Engineer, Natural Resources Canada (NRCan)
Laurichesse and Banville demonstrated instantaneous, centimeter-level, multi-frequency precise point positioning (PPP). Their work shows PPP might become, within a few years, a practical alternative to real-time kinematic (RTK) for a wide range of applications.
Collins Aerospace Systems, a unit of United Technologies Corp., is a leader in technologically advanced and intelligent solutions for the global aerospace and defense industry. Created in 2018 by bringing together UTC Aerospace Systems and Rockwell Collins, Collins Aerospace has the capabilities, comprehensive portfolio and expertise to solve customers’ toughest challenges and meet the demands of a rapidly evolving global market.
PRODUCTS AWARD: Accepted by Paul Alves (left) from presenter Jeff Martin of Spirent Federal Systems. (Photo: GPS World)
Products Award
Paul Alves, P.Eng, Ph.D., Technology Manager — Correction Services, NovAtel, part of Hexagon
Alves was recognized for his work on localization of interference sources for GNSS users leveraging the Interference Tool Kit. With the ITK, users can detect and mitigate adversarial jamming of GNSS signals, as well as unintentional interference from external sources.
Spirent has more than 30 years of experience delivering the world’s best test equipment. Spirent’s test solutions for GPS and GNSS, critical infrastructure SCADA vulnerabilities, Internet L3-L7 common vulnerabilities and exposures, and mobile vulnerabilities allow the world to communicate and collaborate faster. Spirent Federal Systems is a wholly owned subsidiary of Spirent Communications and was established to offer the world’s leading simulation equipment to U.S. government customers, armed services, education institutions, and prime contractors. Spirent Federal’s SimMNSA was the first to be granted Security Approval by the Global Positioning System Directorate.
PNT CHAMPS: The L3Harris team earned the most total points in all six games, and took home a trophy each. (Photo: GPS World)
PNT Games
After dinner, guests broke into teams to test their personal positioning, navigation and timing skills, precisely determined by their ability to toss rings and throw horseshoes under time pressure. Each team rotated through yard games such as ladder toss, ring toss, corn hole and horseshoes to prove who was the most accurate and resilient. The L3Harris team took home the first-place prize.
RAINBOW CONNECTION: Taking on giant pong are members of the rainbow bandana team, (from left) Sanjeev Gunawardena, Thomas Pany, Steffen Thoelert and André Hauschild. (Photo: GPS World)
ORGANIZED CHAOS: Wearing different-colored bandanas, teams cheer on their team members and fight for every point. (Photo: GPS World)
After all the awards were given, everyone got together for a memorable group photo. (Photo: GPS World)
Figure 1: Reflected signals in the local environment suffer different Doppler variations than the desired lineofsight signal. This means that the supercorrelator that is created for a given satellite broadcast couples strongly to the desired line of sight version of the signal, but attenuates any reflected signals arriving from different directions. (Figure: Focal Point Positioning)
The SGPS/SGNSS technology is a patent-protected suite of methods that provides software-based improvements to existing GNSS receivers. All methods within the software suite build upon a core technology called supercorrelation, which enables over a second of coherent integration while undergoing complex motions on low-cost platforms. The benefit is high sensitivity coupled with strong multipath mitigation capabilities, providing a high-accuracy and high-integrity positioning solution in traditionally difficult environments.
Many GNSS receivers perform a small amount of coherent integration, typically less than 20 milliseconds, and then optionally incoherently integrate over many hundreds of milliseconds to boost sensitivity if needed. The major problem with this approach is the resulting susceptibility to multipath interference. Incoherent integration destroys the phase information stored within the captured data before combining it, resulting in line-of-sight and non-line-of-sight signals accumulating within the same correlation peak, producing a distortion of the desired line-of-sight information. This distortion leads to erroneous codephase estimates, which in turn leads to erroneous position estimates.
Coherent integration can decorrelate signals arriving from different directions, but the degree of decorrelation depends on the user speed and the coherent integration time. Supercorrelator technology creates a clock-and-motion-compensated phasor correction sequence that provides over a second of coherent integration on low-cost consumer platforms. The outcome is signal tracking sensitivities down to nearly zero dBHz, combined with high multipath mitigation performance. Such long coherent integration times allow signals arriving from different directions to be separated out in the frequency domain, permitting new capabilities in anti-spoofing and 3D map-aiding methods by directly resolving GNSS angle-of-arrival using a single moving antenna.
Figure 2: The result of supercorrelation on positioning performance in the urban canyons of central San Francisco. The red line is a standard state-of-the-art vector tracking GPS solution, and the green line is the same positioning engine with supercorrelation processing enabled. (Image: Focal Point Positioning)
Traditionally, very long coherent integration times were not practical on consumer devices due to limitations of data modulation bits, crystal oscillator stability, and unknown (often complicated) receiver motion. Supercorrelation overcomes these limitations with signal processing and sensor fusion. Data modulation bits are not an issue for modern pilot signals, and for legacy signals they can be removed with a variety of methods, ranging from prediction or provision of the bits over a datalink, to stripping them directly with signal-squaring methods. Receiver motion can be inferred from inertial sensors mounted alongside the GNSS receiver, as is the case for smartphones and smartwatches, or can be modeled using multi-hypothesis methods. Low-cost crystal oscillators cause phase instabilities which traditionally reduce coherent integration time, but can also be accounted for by multi-hypothesis testing and by joint estimation processes across multiple channels.
A decade ago, consumer GNSS receivers were typically an ASIC or similar hard-wired design. Modern designs incorporate a front-end correlator bank which may or may not be reprogrammable, feeding into a DSP stage which handles all tracking and navigation processing from the DLL, PLL, FLL stages onwards. The flexibility of reprogramming the code running on the DSP stage permits existing GNSS chipsets to be easily upgraded to support supercorrelation, without needing to design and fabricate a new receiver.
Focal Point aims to have S-GNSS enabled chips by early 2020, with licensing opportunities available from summer 2019 onwards.