F4 Tech is contributing to future foresters’ education by providing complementary SilvAssist software to colleges accredited by the Society of American Foresters (SAF). SilvAssist is a set of GIS tools for managing forest inventory data.
Institutions with SAF accreditation will be eligible for licensing of the SilvAssist solution to integrate within their curriculum.
“Understanding the forest inventory process and how it relates to GIS is critical for today’s students of forest resource management,” said Mark Milligan, president of F4 Tech. “We believe that providing SilvAssist free of charge to SAF accredited schools is the right thing to do, and we look forward to getting that started immediately.”
F4 Tech is confident that this new partnership with forestry schools will help to enhance and improve education in the design, management, reporting and analysis of forest inventory data.
SilvAssist is a toolbar for Esri’s ArcGIS that helps to improve productivity by providing information needed for crucial business decisions. SilvAssist is compatible with: ArcGIS 9.3, 10, 10.1, 10.2, and 32 and 64-bit computers.
Stesalit today announced the availability of the SXtreo range of rugged GPS handhelds for survey, industrial use, and field work under extreme conditions such as agriculture, forestry, roads, security and construction.
The SXtreo series of mobile devices are rated IP-68, meaning they are waterproof, dust proof, shockproof, and are coupled with built-in mobile GIS applications. Long battery life allows GPS data collection for a full work day, without the need for recharging. The GNSS devices come with full-size USB port for connecting devices.
Stesalit is based in India, and the SXtreo gives that country an affordable option to take geotagged photos and conduct waypoint surveys. The design and conceptualization of SXtreo is a result of the in-house R&D effort of Stesalit. The road towards the birth of SXtreo is presented in the video:
The GAGAN-enabled SXtreo GN series of rugged GNSS field computers and PDAs comes with a full keypad and large five-inch sunlight-readable screen for field data entry in large forms. These models are designed for GPS data collection and asset management, socioeconomic surveys, mapping, agriculture, logistics, forestry, public transportation, construction and security.
The SXtreo WP 60 and WP61 devices have all the features of a smartphone.
The SXtreo WP 61 rugged smartphone.
SXtreo handheld’s Android and embedded Linux-based open-source secured operating systems are compatible with a range of sector-specific applications designed by Stesalit.
SXgeo is specially designed for waypoint, routes, and track surveys. The added advantage from the similar existing applications is that one can capture geotagged photos and transfer the survey data through GPRS.
SXsurvey is a complete suite for comprehensive survey management. With the features of SXgeo, one can also create large forms dynamically in the devices for survey data collection.
SXfield is specifically built for the field workers and employees working away from office like road construction, oil, gas and other utility services, logistics and distribution chains, FMCG, consumer and white good companies with large sales networks, operations and maintenance organizations with large service networks, and security organizations including police.
The integrated application SXagro is a geospatial agriculture decision-support system in use by agriculture universities and state agriculture departments.
In addition, the SXtreo range of IP68 rugged smartphones is compatible with most of the off-the-shelf mobile software applications.
Tree crowns above 1m2 are extracted, then a Soil Adjusted Vegetation Index (SAVI) is applied to provide an indication of tree health. Green indicates a healthy tree, red indicates a less healthy tree (within the Abu Dhabi forest plantations). So far this process has been applied to over 4,000,000 trees in Abu Dhabi.
Proteus FZC, a provider of satellite-derived mapping and classification services, has completed a demonstration project using satellite imagery to inventory tree plantations in the Emirate of Abu Dhabi. The tree mapping pilot is a spin-off of a larger Emirate-wide habitat and land use/land cover (LULC) project now being spearheaded by Proteus.
In the pilot, the Proteus team processed multispectral data collected by DigitalGlobe’s WorldView-2 commercial imaging satellite to identify the species and conditions of individual trees within the pilot area. Proteus managed the project, in which GMV of Spain performed image processing and automatic tree extraction with local ground-truthing support from Nautica Environmental Associates in Abu Dhabi.
“This pilot demonstrates the viability of using very high-resolution multispectral data to establish a baseline inventory of tree type and health within diverse forest plantations,” said Proteus Project Manager, Richard Flemmings. “We mapped every tree crown larger than one meter in diameter in the pilot area with minimal ground truthing and delivered the results in an Esri geodatabase.”
Abu Dhabi has planted forest plantations totaling nearly 20 million trees that provide aesthetic and environmental benefits throughout the Emirate. Comprised of gaff, acacia, mesquite and other species, these plantations require continuous irrigation with desalinated water at considerable expense. The Environment Agency — Abu Dhabi (EAD) — requested the pilot as it seeks to find an efficient and cost-effective way to monitor the forest stands.
“These forest plantations are valuable resources for Abu Dhabi,” said Flemmings. “EAD envisions a monitoring program that identifies isolated health problems so they can be remediated.”
Proteus applied image processing techniques using all eight WorldView-2 multispectral bands plus one panchromatic band, with an emphasis on the mid-infrared spectra. This multi-step processing distinguished several tree species by their individual canopies and detected stress, possibly related to irrigation, salinity or infestation issues, in some of the trees.
Compared to the traditional ways of monitoring forestry plantations in the area, which implies walking along the tree lines to detect damaged/dead trees, remote sensing offers a cost-effective alternative.
“We used pan-sharpened imagery to create the baseline plantation map, but less expensive lower-resolution imagery such as Landsat could be used for ongoing periodic monitoring,” said Flemmings. “This individual tree mapping technique can be applied to create forest inventories of other species elsewhere in the world.”
Aside from the tree plantation pilot, Proteus is engaged in a fine-scale satellite-derived terrestrial and marine LULC and habitat mapping project for the entire Emirate of Abu Dhabi. The three-phase, multi-million dollar project will ultimately include 60,000 sq. km. of land area and the coastal marine environment down to the 15-meter contour. Advanced processing algorithms are being used to extract LULC and habitat features from high-resolution multispectral satellite imagery acquired over both land and sea. Tree plantations are one of the LULC types identified by the Proteus team in the larger EAD project.
In the coastal Arabian Gulf, Proteus is delivering seabed classifications to depths of 15-20 meters. Deliverables for each phase of the Abu Dhabi mapping project include bathymetric analysis, orthorectified mosaic, LULC/habitat ecological classifications, geospatial models, printed maps at multiple scales, and knowledge transfer.
Since 2011, Proteus has been delivering solutions for mapping and classification projects using multispectral satellite imagery. These mapping projects have been delivered for environmental, oil & gas, engineering and other coastal zone applications in Europe, the United States, the Middle East, and the Caribbean.
Corvallis Microtechnology, Inc., has released its Virtual Tree Bucking application software for use on an iPAD, iPhone or iPod touch device.
When segmenting a tree stem into log products, the important question to ask is how to maximize the income from the stem, the company explained. In some cases, it will be more profitable to divide the tree into a saw log segment and a pulpwood segment. In other cases, it may make more sense to sell the entire stem as pulpwood and not bother cutting it up. The logger will usually rely on past experience and also do some calculations to figure out the best way to utilize the tree stem for the current market. When there is the possibility of getting three different log products out of the same stem, the decision can be difficult to make.
The Virtual Tree Bucking app will help remove some of the guesswork. It will let the user set up the log merchandise grades, conversion factors and prices by volume or by weight. Before actually cutting up the stem, the user can divide up the stem on the screen of this app and try various scenarios to view the yield of wood quantity and potential revenue for each case. The user may enter up to three products per stem and the app will report the volume/weight and value for each log as well as the sum total for the stem.
The app provides the option to save the reported results to a PDF file for later review. It will work with both Metric and English units.
Also included are functions for precisely adding points, lines and areas to the screen, the ability to measure distances and areas as well as the ability to locate a point by address or by coordinates.
The app comes with a detailed built-in help document. It is available at the Apple App Store.
Trimble has introduced the next generation of its Trimble GeoExplorer data collection solution. The new Geo 7X includes an integrated laser rangefinder module, extended GNSS capabilities and improved hardware performance. Together with robust field and office software, the new Trimble Geo 7X handheld can enhance productivity in difficult physical conditions and challenging GNSS environments.
When faced with either obstructed satellites or inaccessible locations, GIS professionals now have the geospatial data collection tools they need in a single package, Trimble said. For times when occupying a position isn’t possible, users can take advantage of Trimble’s new Flightwave technology. With Flightwave technology, users can capture offset measurements from the Geo 7X’s rangefinder module for direct integration with Trimble data collection software. Users point and shoot to log the position, avoiding dangerous conditions or right-of-way challenges. In addition, Trimble’s field-proven Floodlight technology enhances field productivity when heavy overhead cover obstructs satellite signals.
The Geo 7X is compatible with existing and planned GNSS satellite systems — including GPS, GLONASS, Galileo, QZSS and BeiDou — to maximize productivity with additional satellites and ranging signals.
Featuring a new 1 GHz processor and 4 GB of memory running Microsoft Windows 6.5 Professional operating system, the Geo 7X offers enhanced computing performance. Other standard features include a 4.2 inch sunlight readable LED touch display and a 5 MP camera for geo-tagging assets. For wireless connectivity, the integrated modem allows users to send and receive data via GSM networks as well as Verizon’s CDMA network in the U.S. And with its IP65 rating, the rugged handheld GNSS receiver is sealed against water and dust.
With the introduction of the Geo 7X, Trimble also delivers updates to its field and office software portfolio to extend Trimble’s end-to-end data collection solutions with new software workflows and compatibility. In addition to the field-proven Trimble TerraSync and Positions software, the Geo 7X now supports the customizable data collection workflows of Trimble TerraFlex software. Consisting of mobile software and Cloud services, TerraFlex offers a fast and efficient way to collect, process and manage data. Field data is automatically synced with a central server to streamline office operations and drive higher productivity.
”We believe that true productivity is being able to map assets — the first time, every time and anywhere. We’ve built upon our productivity-enabling Floodlight technology and pushed it forward several steps,” said Alain Samaha, business area director of GIS and geospatial software solutions for Trimble’s Geospatial Division. “Users now can position themselves in the optimal location and accurately measure assets remotely with a single, integrated device together with simple software workflows. The Trimble Geo 7X allows mobile GIS users to be productive wherever they need to work.”
The Trimble Geo 7X and supporting software are expected to be available in fourth quarter of 2013 through Trimble’s authorized GIS Distribution Channel.
The iSXBlue II from Geneq works with the Apple iPad and iPhone.
Geneq Inc. announces the iSXBlue II GNSS, a sub-meter GNSS receiver that is Bluetooth-compatible with Apple iPads and iPhones.
Fully authorized and approved by Apple, the iSXBlue II GNSS implements an Apple proprietary Bluetooth authentication feature allowing the NMEA GNSS data to replace the internal GPS location of the iPad or iPhone. A free SDK (software development kit) is available from Geneq to further utilize all the features of the iSXBlue II GNSS.
The iSXBlue II GNSS uses both GPS and GLONASS with SBAS (WAAS/EGNOS/MSAS/GAGAN) to attain 30-cm/1-foot (RMS) accuracy in real time using free SBAS corrections. In addition to Apple iPads and iPhones, it connects wirelessly to any smartphone, handheld, tablet computer or notebook computer that is Bluetooth- compliant.
“The iSXBlue II GNSS is the first high-accuracy GNSS receiver in the world for the Apple iPad and iPhone,” said Jean-Yves Lauture, product engineer, “and by implementing both GPS and GLONASS with SBAS, it provides iPad and iPhone users real-time, sub-meter accuracy around the world.”
The iSXBlue II GNSS builds on the success of the proven SXBlue II GNSS that was designed to optimize SBAS performance under tree canopy and in rugged terrain. With the ability to track 55 satellites (31 operational GPS, 24 operational GLONASS), the SXBlue II GNSS uses between 12 and 19 satellites in view at any time, providing superior performance when working under and around tree canopy, buildings and rugged terrain.
The next-generation iSXBlue II GNSS is the same, small, palm-sized unit as the SXBlue II GNSS and utilizes a small 2.7” diameter GNSS antenna. The unit is waterproof (submersible), dustproof and ruggedized, with an IP-67 rating. Its Class 2 Bluetooth 2.0 has a typical range of 15 meters, and is Apple-approved. The internal, rechargeable, field replaceable Li-Ion battery has on-board LEDs let the user know how much battery life is left. The operating temperature range of the iSXBlue II GNSS is -40°C (-40°F) to 85°C (185°F).
In addition to the built-in long-range Bluetooth transceiver, the iSXBlue II GNSS also has a standard DE-9 RS-232 port and a USB Type B port whose outputs are fully programmable up to 10-Hz standard, and a 20-Hz option. Other optional features are L1 RTK for <2-cm real-time accuracy and base-station RTCM output.
There is no need for post-processing or other sources of differential corrections as the iSXBlue II GNSS uses WAAS (North America), EGNOS (Europe), MSAS (Japan) and GAGAN (India) satellite corrections. Users receive real-time, 30-cm/1-foot positioning all day long.
The iSXBlue II GNSS is targeted at GPS/GIS mapping professionals in industries such as forestry, utility, agriculture, environmental and other natural resource industries in addition to local, state and federal government users.
Today, Hemisphere GNSS announced an all-new series of rugged mobile handheld devices with application software options to support survey, GIS, and mapping professionals. GeoMapper handhelds are designed to work in harsh outdoor environments and features an intuitive and scalable software package.
The GeoMapper family of products (GM100, GM200, GM300, and GM500) offers a variety of features also suitable for forestry, public safety, asset management, utilities, meeting a variety of field data collection requirements. GeoMapper 100, GeoMapper 200, and GeoMapper 300 feature a Windows Mobile operating system. The GeoMapper 500 tablet offers added flexibility and functionality on the Android OS platform. All GeoMapper models provide high-resolution and direct-sunlight-readable display technology for ease of visibility in all situations.
The GeoMapper 300 has dual cameras and a unique built-in laser range capability for acquiring instant geo-referenced images and target location data. Both GeoMapper 300 and GeoMapper 500 feature Hemisphere’s high-accuracy, multi-GNSS, multi-frequency Eclipse RTK technology as standard. All GeoMapper handhelds are IP65 rating or higher for their enclosures to ensure durability in most outdoor environments.
All GeoMapper handhelds feature a newly developed, user-friendly, and scalable GeoMapper Mobile software package designed for professional Field Mapping and GIS applications. GeoMapper Mobile and GeoMapper Office products feature optional post-processing and RTK positioning capabilities to meet the needs of the most demanding professionals.
“Hemisphere has made substantial investments in expanding our Survey and GIS product portfolio, leveraging our unique capabilities of designing GNSS receivers, antennas, and handheld computing technology from our parent company, providing our customers with exceptional value,” said Phil Gabriel, president of Hemisphere GNSS. “Leveraging our 23 years of GNSS development experience with the latest in handheld technology is a natural and exciting next step for us.”
In February 2013, Hemisphere GPS changed its name to Hemisphere GNSS Inc. after parting ways with the Agriculture business unit (Now AgJunction Inc.). While both Hemisphere names are owned by the company, in order to reflect the company’s support of all Global Navigation Satellite Systems (GNSS) and update the company’s image, Hemisphere GNSS Inc. has adopted the use of a new logo and launched a new website.
Hemisphere GNSS will be introducing the new GeoMapper series at the annual Intergeo conference in Essen, Germany, October 8-10, 2013 at booth #A3.070.
F4 Devices has released the Forge Echo for forestry professionals.
“Shipping the first product out this week is a great milestone for us,” said Mark Milligan, president of F4 Tech. “We have been working for years to produce a rugged handheld specifically made by and for foresters and professionals who work in the natural resource community. Seeing the first product come out of manufacturing and into the hands of the customer is a dream come true.”
The Forge Echo offers high-accuracy GPS; high-performance ability under heavy tree canopy; and the capacity to measure distance and height through rugged terrain.
The Forge Echo series combines the most precise GPS technology with an integrated clinometer tool that measures slope and vertical angles. Paired with groundbreaking, patent-pending echolocation technology, the Forge Echo enables users to measure accurate data on elevation changes, distance and tree heights.
The Forge series of products has a fully ruggedized classification of IP67, and is shock-proof, dust-proof and waterproof. It comes standard with a Win Mobile 6.5 classic operating system, 3.5” display, 800-MHz processor, 512-MB SDRAM memory, 8-GB onboard storage, Bluetooth, Wi-Fi, 5 megapixel camera and an up to 32 GB micro SD expansion slot.
F4Devices, a subsidiary of F4 Tech and strategic partner with BAP Precisions, Taiwan, has introduced a new generation of high-precision GNSS devices for GIS field applications, the Flint rugged handheld. With the new Flint handheld, field workers requiring a rugged mobile handheld device have a unit that is lightweight, compact, rugged, and cost-effective, the company said. The Flint fits well into GIS field data collection markets such as municipalities, oil and gas and forestry, F4Devices said.
The Flint handheld offers a unique, one-of-a-kind combination of flexible GPS configurations, ranging from 1 to 3 meters to sub-meter accuracies, while supporting geotagging with the 5 megapixel autofocus camera as well as Wi-Fi, Bluetooth, and 3G data. There are two versions to choose from, the S812H (includes GPS, Bluetooth, Wi-Fi and 5 MP camera) and the S852H (includes GPS, Bluetooth, Wi-Fi, 5 MP camera and 3G data).
“The new Flint handheld impresses, from the first moment you see it. The ruggedness of the device, IP65, in this small of a package while achieving the GPS accuracies we have been able to achieve is something to acknowledge as a leader in its class,” said Brian Holley, director of Distribution for F4Devices. “Add in its high-resolution, sunlight-readable VGA screen, extendable data storage and Microsoft Office Mobile standard on all units, this makes it even more impressive.”
The Flint handheld is specifically designed for field professionals looking for a rugged, dependable feature-rich device, said F4Devices. The camera button is located as if the user was holding a camera. Combined with the GPS, it provides a powerful solution for precise geotagging. In tough environments, whether it is extreme weather or high multi-path, the Flint handheld is up to the challenge, the company said.
The F4Devices Flint is shock-proof, dust-proof, and waterproof. The battery supports the field users’ needs with at least 10 hours of performance.
F4Devices, along with BAP Precisions, is focused on supporting solutions providers by working with them directly to integrate their applications with the Flint handheld. Any feature or application in the Flint handheld is accessible to software engineers for full and complete integration, allowing a fully developed solution to be offered to their clients, the company said. API’s are available for solutions providers to access and communicate with the features they require.
The 3G data modem in the Flint handheld allows field users to stay in touch remotely, increasing productivity. This also allows real-time communications with the office for critical information upload. This also provides a level of safety for field users by easily staying in touch with supervisors or persons in charge.
By Jürgen Rossmann, Petra Krahwinkler, and Markus Emde
Modern machines such as wood harvesters can automatically cut trees and remove branches, but an expert is still needed to plan a thinning and to mark the trees to be felled. The process can be accelerated if the forest ranger can virtually mark trees to be cut, using geographic coordinates instead of colored crosses sprayed on the stems. This requires the robotic wood harvester to be able to locate itself accurately to enable automatic navigation to the next tree for cutting.
Absorption of the GPS signal in the forest canopy leads to poor results, however, with errors up to 50 meters and more. Furthermore, the canopy may cause interruptions and signal loss for several seconds. The performance can be even worse on a moving vehicle, where the signal may even get lost until the vehicle reaches an open area or stops.
Other approaches use differential GPS (DGPS) sensors as their main source of position information. However, our experiments using a high-precision DGPS sensor showed that its accuracy is not even close to sufficient for navigating to a single tree. As the DGPS suffers from the same canopy-related disturbances and shielding, it cannot benefit from its theoretical advantages. In pratice, the DGPS system did not update its position at all when signal reception became too weak.
A different approach was needed. We found it in the framework of the Virtual Forest, more precisely in the semantic modelling of forests, where techniques are being developed to delineate single trees from remote sensing data, such as airborne laser scanner data. Along with the trees and their geo-coordinates, the height and the diameter at breast-height are determined. This data can be used to generate a tree map, which can be used for navigation. The map has a mean error between 0.5 and 1.5 meters, which is still below the mean tree distance of about 2.5 meters.
Visual GPS. The idea of Visual GPS is to bring current developments in the field of robotics into the forest and combine them with information on forest inventory so that the result outperforms other navigation approaches. A matching algorithm is run based on a tree map, generated from remote sensing data, and the tree group, which was detected by one or more laser scanners.
We then implemented a particle filter algorithm, as it enables considering different kinds of distributions. Particles are also called random state samples, and each particle is a hypothesis as to what the true world state might be.
In the initialization, particles are distributed uniformly. An importance weight wt is calculated for each particle, incorporating the measurements as described below. A sampling step rejects particles with a low importance weight and replaces them with new particles, which are distributed according to the previous map. This process is repeated until the particle distribution concentrates at one point, and the particle with the highest weight is returned as the result (see Figure 1).
Figure 1. Particle concentration after resampling; wood harvester at center.
A single tree as a landmark cannot be associated with its corresponding tree in the map. However, patterns of tree positions can be matched. We chose a square area to guarantee even particle distribution and short calculation time. Each particle represents a hypothesis for the position of the vehicle and is tested for its probability to represent that position.
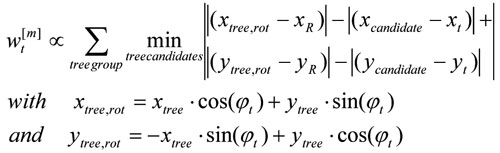
To make the approach more robust against faulty tree maps, we implemented a rotation variant approach, determining vehicle heading along with its position. This enhanced the probability measure used in the propagation step. Instead of embracing only the distances of the trees to the reference point, their relative position is used, considering the heading wt of the current particle:
This approach directly calculates vehicle heading, but the sensitivity towards rotation, which results from the new probability measure, leads to a higher number of particles that must be used during the initialization step.
Global Search. Experiments on a test area with about 22,700 trees proved that the algorithm worked reliably for tree groups containing 20 or more trees, and for position errors of the magnitude of the mean tree distance. Similar tree groups could not be found within the forest. However, the calculation time was too long to be used for navigation.
Local Search. To overcome the high calculation time, we reduced the number of particles. The initial position is estimated with an ordinary GPS sensor. Although the GPS measurement is faulty in the forest, it can limit the search to a restricted area. Machines most often start at the edge of a forest stand, at a forest road, or a canopy opening. At these spots the canopy usually is transparent, and GPS sensors work with higher precision. Therefore, they provide a good initialization for the algorithm.
Robotic wood harvester.
In the following steps, the previous position can be used instead of the output of the GPS sensor for determining the search area. The previous position provides a better initial pose estimation than the GPS sensor and therefore gives the opportunity to further decrease the search area.
To reduce the number of trees for which the distance has to be calculated, trees with a distance from the initial pose estimation smaller than the sum of the estimation of the maximal position error and the maximal distance of the trees in the scanned tree group from the reference position are extracted from the tree map.
Another way to reduce the search area is to estimate vehicle orientation. This is difficult for machines such as wood harvester, which moves slowly and stops frequently when cutting trees. Therefore, small lateral position differences result in large orientation deviances, as the difference vector does not directly point into the direction of the movement any more. Another approach is to use sensor fusion and mount a compass onto the vehicle. During particle initialization, the angle can be restricted to the domain of uncertainty around the compass orientation. However, mounting a compass onto a wood harvester proved to be a serious problem, as the harvester’s massive metal body disturbs the compass measurement.
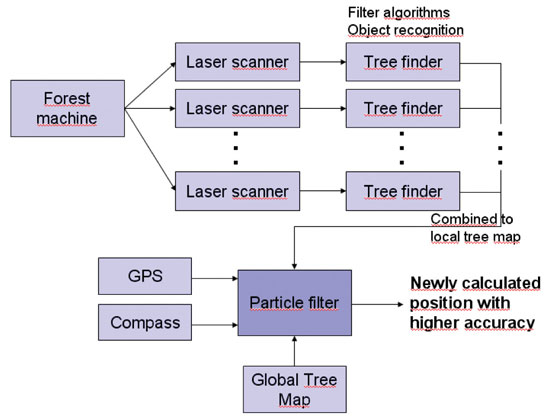
Figure 2 shows the workflow of the complete system.
Figure 2. Navigation system components.
Results
The simple criterion presented here proved to be reliable in the vast majority of cases. Problems can occur when the tree group contains trees that are not part of the tree map (false positive). This can happen due to missing trees in the tree map or faulty tree cognition in the local laser scanner measurement. In the first case, the understory might not have been detected in the airborne laser scanner data. In the second case, other objects like the harvester’s aggregate might have been mistaken for a tree.
The case of trees not detected in the local laser scanner measurements but contained in the tree map (false negative) does not create problems in the pose estimation step. The algorithm searches for a corresponding tree for each unit in the tree group. For a false positive, no corresponding tree can be found, whereas a false negative is simply not considered. However, if the size of the tree group is too small, the estimation errors grow. The minimum number of trees depends on the search area radius. A size of 20 trees proved to generate reliable pose estimations even during the global search. Dropping below 15 trees, the number of faulty position increases rapidly as more similar patterns can be found.
Single faulty positions can be filtered with respect to the movement constraints of a harvester. The velocity is very low, and the orientation cannot jump. In the experiments, cycle times of about 0.5 seconds were reached on a standard PC. As forest machines do not demand very short calculation time, the algorithm proved to run fast enough to allow identification of single felled trees onboard real machines. One application of the algorithm was to support a navigation assistant to the next tree, similar to navigation systems in cars.
To evaluate system accuracy on a real wood harvester, a surveyor’s office was instructed to measure the vehicle’s position at seven distinct locations. At each position, the sensor input data was written to file for several seconds. This data was evaluated, and for each location more than 45 pose estimations were calculated. The mean value of the position error amounted to approximately 0.55 meters.
Future Work
Reliability can be enhanced by using a detailed digital ground model and the cabin tilt in order to detect the area where the laser beams hit the ground, and therefore avoid the detection of false positives. Similarly, the position of the aggregate, which can be measured by integrating sensors in the hydraulic cylinders of the crane, can be cut from the laser scanner measurements and ignored during tree detection, further reducing the amount of false positives in the tree group. With the integration of an outlier rejection step for false positives in the detected tree groups that ignores trees for which no corresponding candidate tree can be found, a more accurate importance factor can be calculated.
Another task is the integration of the algorithm with a Kalman filter to allow real-time performance of the algorithm. Therefore, the Kalman filter is initialized with the pose estimation of the particle filter algorithm, which is also used for continuous checks of the current position estimate, thereby combining two algorithms with different advantages. The Kalman filter allows real-time execution and therefore speeds up the overall navigation algorithm. The particle filter algorithm can periodically check the position estimated by the Kalman filter and correct it. Furthermore, it provides a strong method to cope with two main problems in mobile robotics: the data association problem and the kidnapped robot problem.
Simultaneously, a mapping and map-correction algorithm could be integrated into the system so that understory trees, which cannot be detected using remote sensing data, and deciduous trees, which are more difficult to delineate in airborne laser scanner data, can be added to the tree map.
Jürgen Rossmann is head of the Institute of Man-Machine Interaction at the RWTH Aachen University, where Petra Krahwinkler and Markus Emde are research scientists.