One Galileo satellite has been reconfigured to emit a new signal component optimized to serve low-end receiver devices and internet of things (IoT) applications. According to the European Space Agency (ESA), GSAT0202, in elliptical orbit, was reconfigured in January to transmit the new signal, also known as the G1 E5 Quasi Pilot.
The G1 E5 Quasi Pilot in the E5 band lies along a narrow part of the overall Galileo signal, intended to enable streamlined positioning fixes requiring less calculation — without affecting the E1 and E6 signal bands, on which Galileo also transmits. The initial receiver test showed that the signal component has the potential to reduce the signal acquisition time by a factor of three compared to the current GPS L5 or Galileo E5a signals.
Image: ESA
Once GSAT0202 was reconfigured, signal measurements were collected using the high-gain antenna installations from the Galileo in-orbit test facility, which confirmed the stability of the augmented signal. After G1 E5 Quasi Pilot was broadcast, it was successfully acquired and tracked by a set of receivers.
Airbus Defense and Space, Thales Alenia Space Italy, the European Union Agency for the Space Programme (EUSPA), the European Commission, and Spaceopal supported this test.
The other elliptical Galileo satellite, GSAT0201, will also be reconfigured after further testing. Selected chipset manufacturers will be involved in the testing under supervision of EUSPA. The test results will be evaluated at the Galileo Programme level, to eventually introduce G1 E5 Quasi Pilot into the constellation.
In 2022, the Galileo GNSS continued to provide the world’s most precise satellite navigation information, to a user base that stands at more than 3.5 billion worldwide. Furthermore, provided services continue to improve and expand, with plans for high-accuracy positioning and signal authentication now reaching fruition.
The European Union Agency for the Space Programme (EUSPA) and the European Space Agency (ESA) continue to enjoy an effective collaboration on the many development, deployment, and evolution activities of the Galileo Programme — each according to their respective responsibilities for service provision and system development with the European Commission (EC) acting as the program manager.
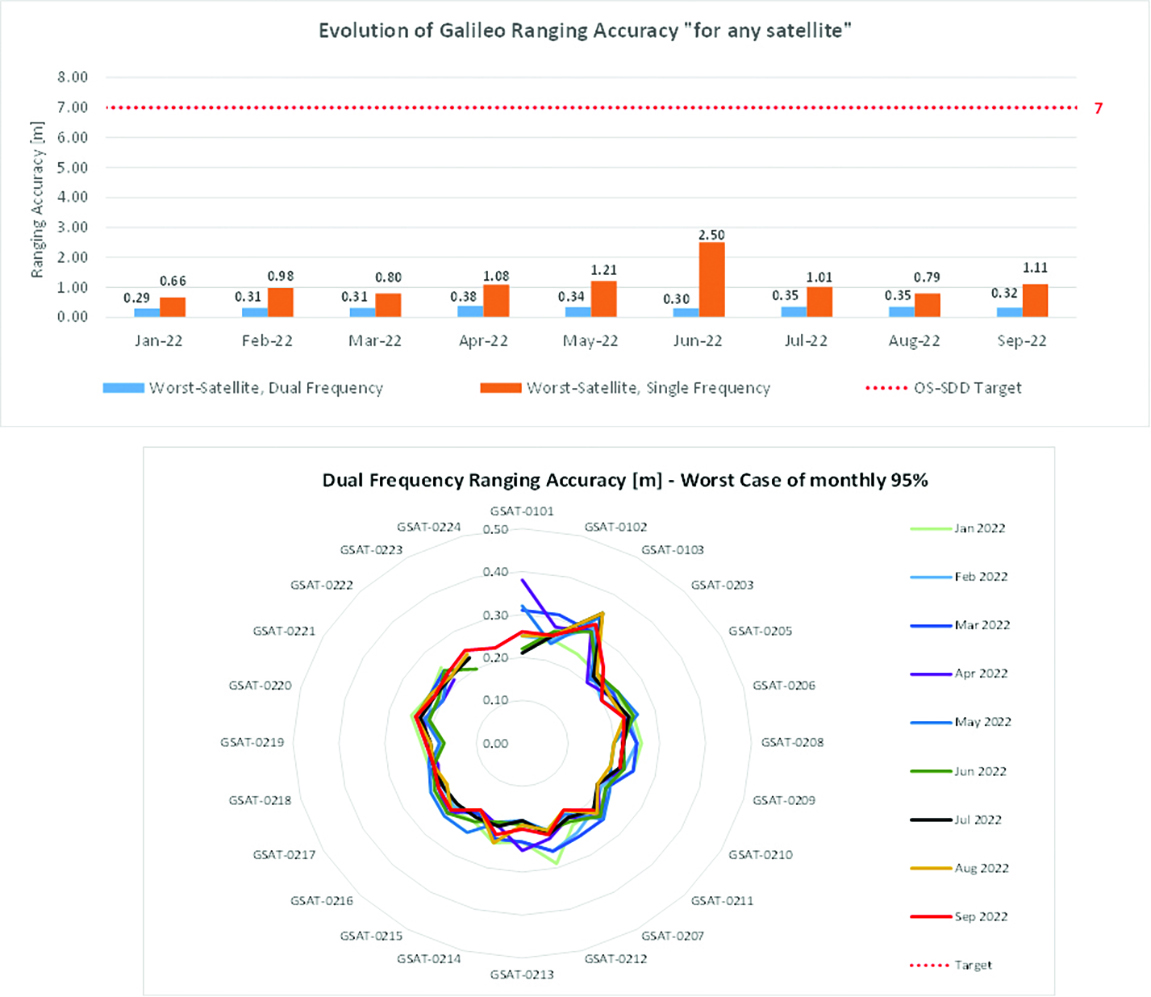
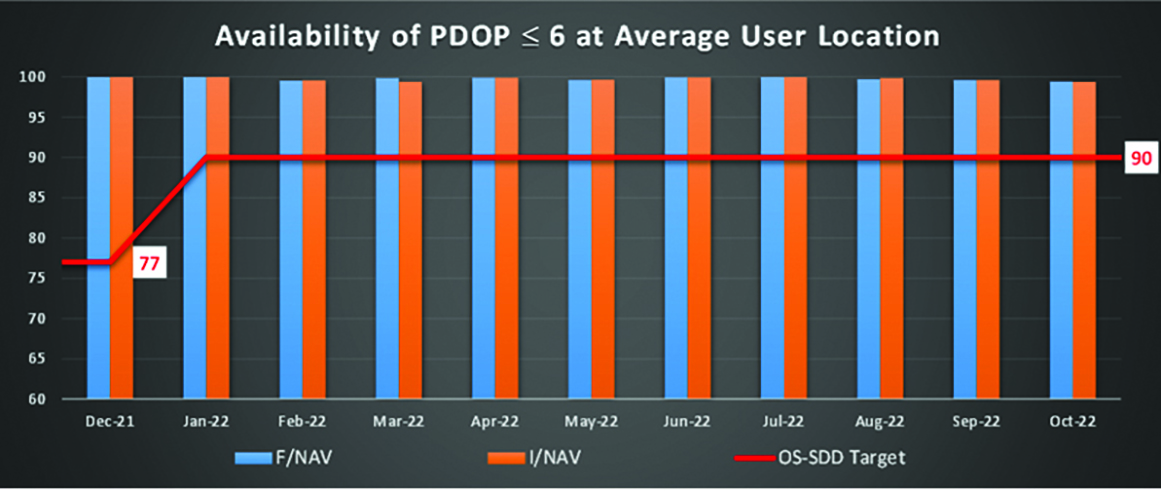
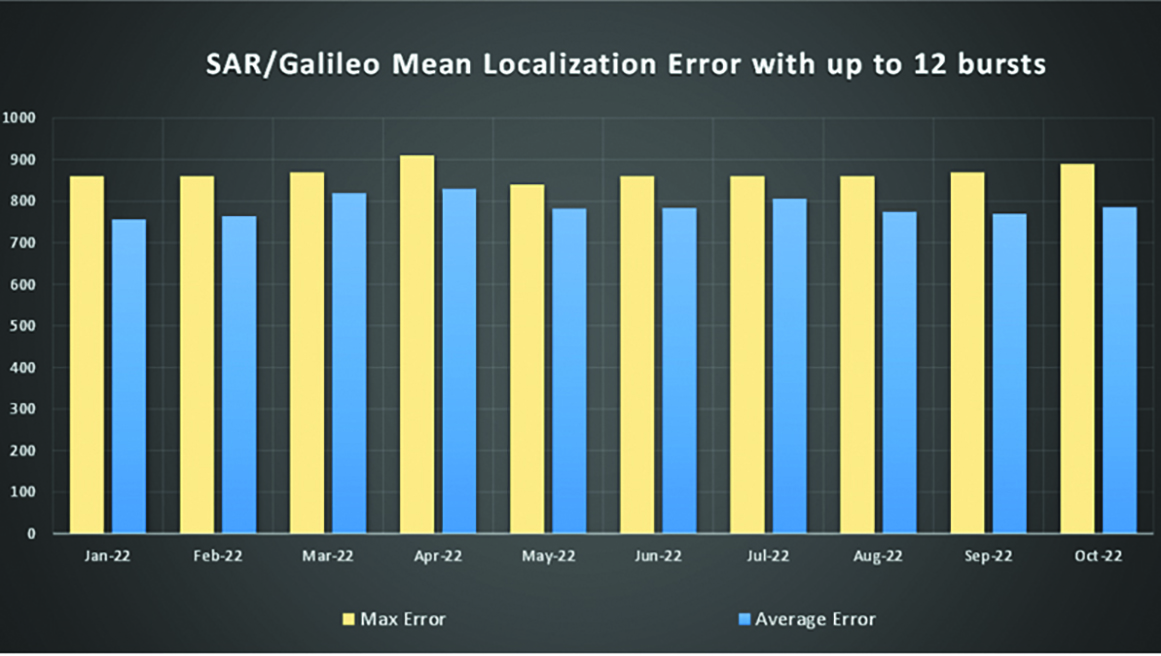
Ranging accuracy performance from January to September 2022.Positioning-related MPLS from January to October 2022.
New Services Launched in 2022
Excellent Performance
Service delivery operations and maintenance of operational systems are managed by EUSPA, which supervises many contracts that carry out the day-to-day activities from dedicated control and monitoring centers throughout Europe. In 2022, Galileo timing, navigation, and SAR/Galileo services were delivered with excellent performances that continue to exceed the formal declarations for minimum performance levels (MPL), which were increased in January, both in terms of absolute accuracy and overall service availability. The entry into service of two additional satellites in May and August, have further consolidated the overall service availability to end users.
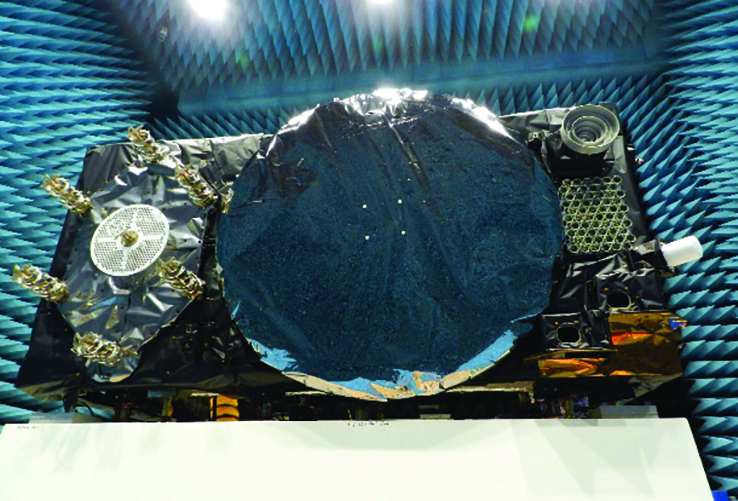
Galileo FOC Batch 3 satellite under testing.
Expansion of Service Portfolio
The service provision teams have been able to focus on improvements to, and expansion of, the service portfolio.
The I/NAV improvement will positively impact end users by enabling a faster time to first fix, and updates to the data validity status flags will lead to better protection of users against expired navigation data. These changes are implemented in updates of the onboard software of the satellites being rolled out across the constellation. At present, seven operational satellites have been successfully updated; the complete software upgrade campaign is planned to be completed this summer.
Galileo’s new High Accuracy Service will provide free precise point positioning (PPP) corrections, in the Galileo E6-B data component and by terrestrial means, for Galileo and GPS (single and multi-frequency) to achieve real-time user position improved by up to 10 times. The infrastructure to support an initial service (Phase 1) is nearing completion, and the formal declaration of the service capabilities is planned for early this year.
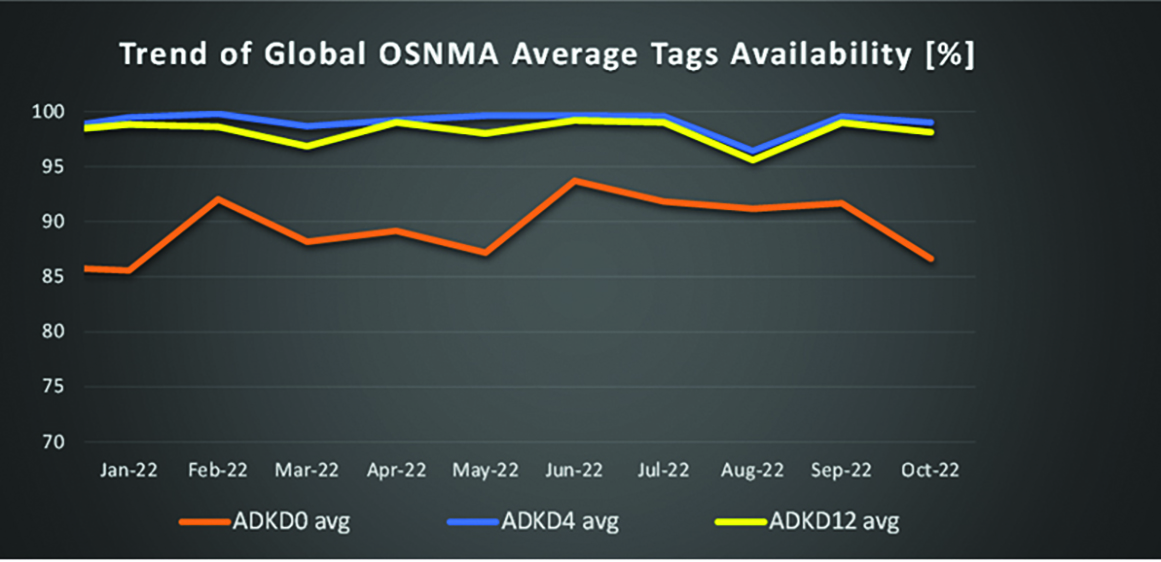
To provide users with a method of authenticating the received Galileo signals, especially the satellites ephemerides and the Galileo timing parameters, the new Open ServiceNavigation Message Authentication (OSNMA) service enables a receiver to confirm that a navigation message originated from the EU Galileo infrastructure. Many application areas are expected to benefit from this capability, including smart tachographs, telematics and logistics, UAVs, location-based services, and timing services. Having successfully demonstrated the technology behind the service in 2022, including a public observation phase, the roll-out of the Initial Service is planned to take place by the end of the year.
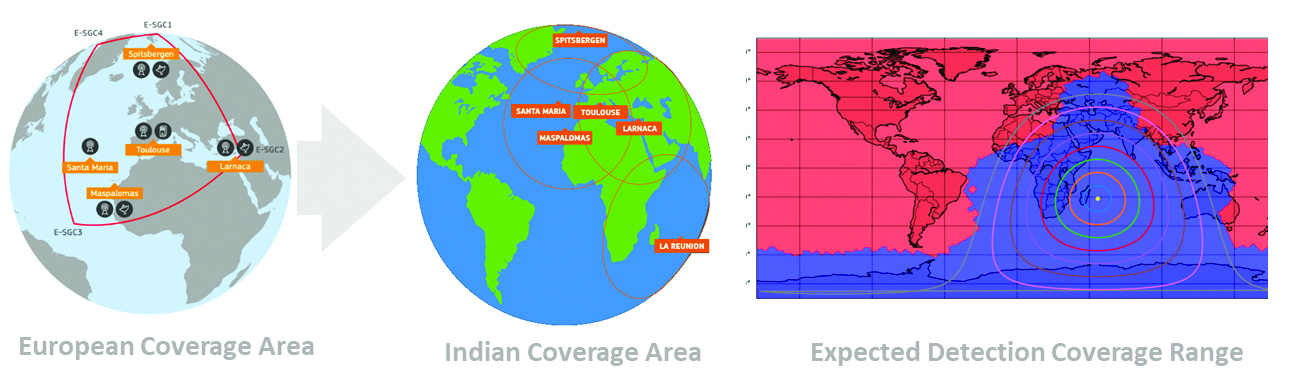
A fourth Medium Earth Orbit Local User Terminal (MEOLUT) in La Réunion will extend the SAR/Galileo Forward Link Service Coverage Area over the Indian Ocean as part of the SAR/Galileo full operational capability (FOC) declaration expected in the first quarter of 2023. The Cospas-Sarsat commissioning of this new station was completed in September 2022, and operational data is already being distributed to Cospas-Sarsat.
Reference documents for the above services can be found at the EUSPA European GNSS Service Centre website, including technical notes, interface control documents and service declaration documents.
SAR/Galileo-related metrics from January to October 2022.Extension of the SAR/Galileo Forward Link Service Coverage Area over the Indian Ocean.
FOC Infrastructure Development Nears Completion
Satellite Production
The production of the third batch of Galileo FOC satellites advanced further in 2022 with the completion of the environmental tests and the system compatibility test campaigns at the European Space Agency Test Centre in Noordwijk, The Netherlands. After 10 years of successful testing, on Oct.18, 2022, the last Galileo FOC satellite (flight model number 34) left the test center to return to the premises of the satellite manufacturer, OHB Systems, in Germany. Testing of the remaining 10 satellites has confirmed that they have been correctly built and will perform well in orbit. The acceptance review of the last couple of satellites will take place this summer.
At the beginning of 2023, the plan is to start in-orbit testing of a quasi-pilot signal on the E5 frequency using the Galileo GSAT201/202 satellites in elliptical orbit. The provision of a signal offering coarse acquisition in Galileo E5-A/GPS L5 can be a distinguishing feature for Galileo with respect to all other constellations to further improve the capability to acquire the E5 signal at low complexity. Following in-orbit testing, the strategy for roll-out of this capability will be assessed with the involvement of receiver manufacturers.
New SAR Galileo MEOLUT facility in Réunion island.
Access to Space
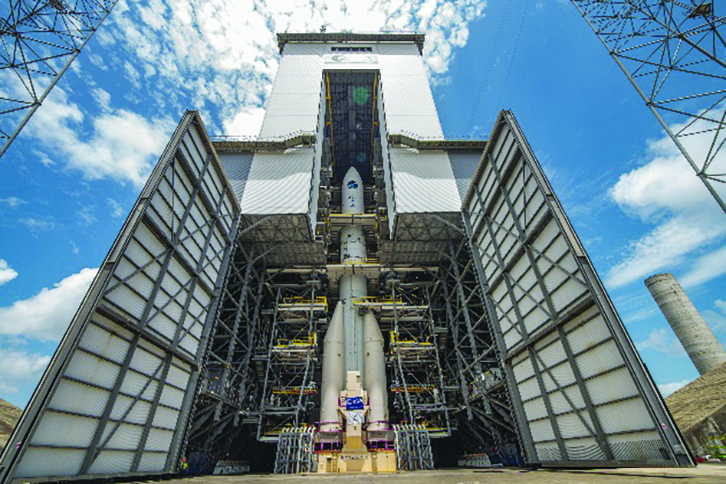
The discontinuation of Soyuz launch services from the Kourou Space Centre in French Guiana, because of the Russia-Ukraine conflict, has caused delays in the two Galileo launches that had been planned for 2022. The Launch 12 campaign had to be interrupted and in March 2022 the FM25 and 26 satellites were put in storage at the Kourou launch base, then returned to Europe in November.
Ariane 6 is the baseline launcher for Galileo satellites to ensure European independent access to space. The remaining Batch 3 satellites will be launched with the Ariane 62 launcher vehicle, the two strap-on solid booster variants of Ariane 6, now undergoing the final stages of development led by prime contractor Ariane Group. Ariane 6’s maiden flight is scheduled to take place in the fourth quarter of 2023.
Ground Segment
An upgrade of the ground control segment, in charge of command and control of the satellite constellation, is being developed by the industrial consortium led by GMV. The upgrades will address resolution of hardware and software obsolescence including cyber security, operability improvements, and a security monitoring overlay.
With the planned increase in the number of satellites in orbit, an additional telemetry tracking and control facility (TTCF) is being deployed in Kourou leading to seven operational TTCF stations in early 2023.
The ground mission segment, in charge of navigation control, is undergoing a complete technological refresh, including hardware/software virtualization performed by an industrial consortium led by Thales France. This upgrade will provide additional robustness, including a system extended contingency mode resilient to outages lasting up to seven days and a new state-of-the-art cyber security monitoring system. It will also provide ranging authentication through encrypted codes on the E6-C signal component for the implementation of the Commercial Authentication Service. Global coverage will be further increased with the introduction of two Galileo sensor stations in Wallis (Pacific Ocean) and Bonaire (Caribbean Sea), for a total of 15 sites around the globe.
OSNMA-related metrics from January to October 2022.
G2G Development Started
Galileo’s second generation (G2G) will introduce many innovative technologies to offer unprecedented precision, robustness, and flexibility.
2022 was a key year for the evolution of G2G activities with the fast development cycles of the first batch of G2 satellites, beginning development of the associated G2G in orbit validation (IOV) ground segment and system test beds, and the consolidation of the G2G final system capabilities — including the coordination of the mission/service roadmaps with the EC, EUSPA, and the EU Member States delegates.
Ariane 62 launcher.
G2G Satellite Manufacturing
From the satellite development point of view, the two parallel contracts to develop and manufacture each of the six G2G batch one (G2SB1) satellites are progressing in a fast development environment, with the first hardware units ready for integration and testing.
Following the completion of preliminary design review, these two contracts (for six satellites each) are preparing for unit-level validation/testing, which will lead to the critical design review.
These satellites will provide the following key innovations:
Reconfigurable fully digital navigation payload
Point-to-point connection between satellites by inter-satellite-link for command and control, and ranging functionalities
Electric propulsion for orbit-raising capabilities
Advanced jamming and spoofing protection mechanisms to safeguard.
The Galileo signals will improve with:
On-board authentication capabilities
Increased ground-to-space data rate
Improved time reference (number of clocks and advanced clock monitoring functions).
G2G IOV Procurements
2022 was also the year in which two key events took place with respect to G2G in-orbit validation (IOV) ground segment and system test bed procurements:
Finalization of the procurement cycle, now in the final evaluation/award phase, to be kicked off in the first quarter of this year
Confirmation of the IOV design through different coordinated actions with the EC and EUSPA, including the G2 system preliminary design review.
The contracts will provide Europe with the following capabilities:
G2SB1 satellite launch and early orbit phase, in-orbit testing and enhanced legacy services provision
G2 new capabilities in-orbit validation, including prototyping and validation of all the novel technologies that can exploit the full capabilities of the G2SB1 satellites.
Eleven contracts will be issued to manage in synchrony all the G1 and G2 assets for the coming years:
G2 IOV ground control segment (G2 GCS) for satellites monitoring and control
G2 IOV ground mission segment/secured facility (G2 GMS-GSF) for the production, dissemination and monitoring of all enhanced legacy services and the dissemination of new G2 advanced capabilities for validation
G2 IOV security monitoring (G2 SECMON), for the cyber/security monitoring of the system
G2 filling device (G2 FD), to ensure proper initialization of system assets
G2 system test bed (G2STB), to generate and monitor new G2 capabilities for validation of the G2G mission/services
G2 PRS test bed (G2PRSTB), similar to G2 system test bed but focused on advanced PRS capabilities for validation purposes
G2 security chain (G2SC), a test bed to ensure proper satellite-ground segment qualification before launch
Four system engineering support contracts (G2 SETA), where the main GNSS technical experts from different industries in Europe provide their support to ESA and EUSPA in their different fields of expertise.
These contracts are complemented by a significant set of system research and development and test tools, such as test user receivers and radio frequency constellation simulators.
G2G batch number one (G2SB1) satellites.
Galileo Second Generation System PDR
The Galileo Programme is not only focusing on short-term G2G development activities, but also looking forward to the future in terms of the consolidation and definition of G2G final operation capabilities. During the second half of 2022, more than 200 public representatives from the EC, EUSPA, ESA and Member States held countless meetings in the frame of the G2G system preliminary design review, which concluded in early December 2022.
As part of this review, the long-term implementation (G2G in orbit capability, or IOC, and final operational capability, or FOC) was reviewed and an agreement was reached on future steps. The evolution of Galileo capabilities will not only provide better services through advanced technical solutions, but will also ensure continuity of service and enhanced backward compatibility for first-generation legacy users.
Conclusions
The efforts of ESA and EUSPA continue with the aim of providing users continuous and stable services and evolving space and ground infrastructure to maintain Galileo competitiveness with the other global navigation satellite systems.
For analogous updates on the other three GNSS constellations, please see:
On Aug. 19, the U.S. Federal Communications Commission (FCC) granted a request for authorization from AT&T Services to use Galileo for emergency location purposes.
AT&T plans to use Galileo in conjunction with GPS to improve the accuracy of its E9-1-1 location services on mobile devices, and facilitate faster response from emergency services when wireless callers dial 9-1-1.
The request was approved by the FCC’s Public Safety and Homeland Security Bureau .
The FCC found that AT&T had satisfied the conditions for commercial mobile radio service (CMRS) providers to integrate foreign satellite signals into E9-1-1 services.
Under E9-1-1 requirements established in 2015, CMRS providers seeking to use foreign signals for E9-1-1 services must meet several conditions, including ensuring that integrating non-U.S. signals won’t cause interference with the E9-1-1 system.
Carriers also need to submit a signal integration plan including a mechanism to detect, mitigate and disable Galileo signals if they cause harmful interference.
Photo: Philipp Berezhnoy/iStock / Getty Images Plus/Getty Images
Access to the Galileo signal in a multi-constellation environment is providing benefits and opportunities for businesses, thanks to the enhanced performance and increased accuracy on offer, said the European GNSS Agency (GSA).
Swedish geographical information technology company SCIOR Geomanagement AB uses a variety of technology in its equipment, including drone aerial photography, terrestrial laser scanning, GNSS or combinations of these.
SCIOR, a measurement technology producer, incorporates RTK processing techniques into its approach. The company also uses Galileo-enabled receivers to increase the positioning accuracy of its solutions.
According to the company’s findings, which it presented at the 2019 Intergeo conference in Stuttgart, it has been achieving significantly enhanced performance and other benefits in its day-to-day activities from the use of Galileo-enabled equipment, GSA said.
“Our experience with Galileo has shown an improvement in the density of the constellation of visible satellites, and thus an improvement in the time needed to obtain centimeter-level accuracy,” said Javier Corral, an engineer at SCIOR Geomanagement AB. “From my personal point of view, I would recommend using this constellation in combination with the other existing ones, since it provides you with a better and quicker performance.”
According to GSA, the most significant performance improvements are observed at high latitudes and within forest environments. Even taking into account that better results can be obtained in open spaces, using multi-constellation GNSS with Galileo in the woods is sometimes the only way to obtain a satisfactory performance if there is no reference station close enough. performance will be even better in coming years as the number of Galileo satellites increases to reach full operation capability, allowing users to obtain their desired position accuracy and availability in a shorter period of time, GSA added.
The U.S. Federal Communications Commission (FCC) granted in part the European Commission’s request for a waiver of the commission’s rules so that non-federal devices in the United States may access specific Galileo signals. While private users were free to use the European GNSS, with this ruling entities such as telecommunications companies can now also use Galileo.
With today’s action, consumers and industry in the United States will now be permitted to access the E1 and E5 Galileo signals to augment GPS.
Since the debut of the first consumer handheld GPS device in 1989, consumers and industry in the United States have relied on the U.S. GPS to support satellite-based positioning, navigation, and timing (PNT) services that are integral to everyday applications ranging from driving directions to precision farming.
The order, approved Nov. 15, finds that Galileo is uniquely situated as a foreign GNSS system with respect to the U.S. GPS, since the two systems are interoperable and radiofrequency compatible pursuant to the 2004 European Union/United States Galileo-GPS Agreement.
Specifically, the order permits access to two of the Galileo system’s satellite signals — the E1 signal that is transmitted in the 1559-1591 MHz portion of the 1559-1610 MHz Radionavigation-Satellite Service (RNSS) frequency band, and the E5 signal that is transmitted in the 1164-1219 MHz portion of the 1164-1215 MHz and 1215-1240 MHz RNSS bands. These are the same RNSS bands in which the U.S. GPS satellite signals operate.
The order does not grant access to the Galileo E6 signal, which is transmitted over the 1260-1300 MHz frequency band, since this band is not allocated for RNSS in the United States or used by the U.S. GPS to provide PNT services.
The commission noted that granting access to the Galileo E6 signal could constrain U.S. spectrum management in the future in spectrum above 1300 MHz, where potential allocation changes are under consideration.
Researchers from the Department of Electrical Engineering at KU Leuven (University of Leuven, Belgium) have designed authentication features that will make it more difficult to send out false Galileo signals.
Professor Vincent Rijmen and doctoral student Tomer Ashur from the Department of Electrical Engineering (ESAT) at KU Leuven have advised the European Commission on ways to make Galileo signals more difficult to falsify. Their authentication method involves electronic signatures, similar to methods used for online banking.
Navigation systems are based on satellites that send out signals, including their location. The distance to four or more satellites makes it possible to determine someone’s geographical position and time. But this process may go wrong when hackers send out signals of their own that drown out the real ones. As the authentic signals are blocked, the position information for the navigation system is no longer correct.
To avoid delaying the launch of Galileo, the researchers could only use the remaining “bits” in the signals for authentication purposes.
“This is why we support the TESLA method for electronic signatures,” Rijmen says.
“TESLA (Timed Efficient Stream Loss-Tolerant Authentication) signatures fit into 100 bits,” he adds. “They quickly expire, but this is not a disadvantage in the case of satellite navigation because the location is authenticated every 30 seconds or less anyway.”
The method still needs to be tested and validated before it can be made available to the general public.
“The authentication service is scheduled to become publicly available on a number of Galileo satellites in 2018,” Rijmen says. “By 2020, the method will be fully operational. To use it, however, you will need a special receiver for Galileo signals that can also verify the electronic signatures. These receivers are currently in development.”
The European Union activated its Galileo satellite navigation system in December 2016.
Galileo satellites 13 and 14 have begun transmitting navigation signals as fully operational members of the constellation.
The pair were launched from Europe’s Spaceport in French Guiana on May 24.
After launch and maneuvers to reach their final orbital altitude, their navigation and search-and-rescue payloads were methodically switched on and checked out. Their performance was assessed in relation to the rest of Galileo system.
Europe’s 13th and 14th Galileo satellites being encapsulated inside their launcher fairing. (Photo: ESA)
This lengthy test phase saw the satellites being run from the second Galileo Control Centre in Oberpfaffenhofen, Germany, while their payloads’ output was assessed from the European Space Agency’s (ESA’s) Redu centre in Belgium, equipped for the tests with specialized antennas for receiving and uplinking signals.
The test campaign measured the accuracy and stability of the satellites’ atomic clocks — essential for the timing precision to within a billionth of a second as the basis of satellite navigation — as well as assessing the quality of the navigation signals.
Oberpfaffenhofen and Redu were linked for the entire campaign, allowing the team to compare Galileo signals with satellite telemetry in near-real time, according to ESA.
These two satellites were visible in the sky above Redu for a limited time each day, ranging from three to nine hours, so tests were scheduled accordingly.
Now that in-orbit testing is completed, the satellites are transmitting working navigation signals and are ready to relay any Cospas–Sarsat distress calls to emergency services.
The next four satellites, launched together on Nov. 17, are beginning the same in-orbit testing activity, with the aim of joining the network next spring.
Lime Microsystems and Airbus Defence and Space, with funding from Innovate UK (formerly the Technology Strategy Board), will jointly be developing robust GNSS products, according to a Lime Microsystems blog. Airbus D&S, using Lime’s Field Programmable RF (FPRF) transceiver technology, is developing a robust timing receiver that exploits signals from the new Galileo satellite navigation constellation.
A highly integrated Field Programmable RF (FPRF) solution based on Lime’s technology, and an innovative system implementation of the kind provided by Airbus D&S, will provide a high-performance GNSS product with the potential for integration with other wireless capabilities, the companies said.
“Lime FPRF transceiver matches our rigorous technical performance requirements and we are looking forward to be working alongside Lime in this strategic engagement,” said Mike Turner, Airbus D&S.
“We are delighted to be working with Airbus, supporting a complimentary technology that could impact variety of applications such as wireless infrastructure,” said Ebrahim Bushehri, CEO of Lime Microsystems.
Analysis of new Galileo signals at an experimental ground-based augmentation system (GBAS) compares noise and multipath in their performance to GPS L1 and L5. Raw noise and multipath level of the Galileo signals is shown to be smaller than those of GPS. Even after smoothing, Galileo signals perform somewhat better than GPS and are less sensitive to the smoothing time constant.
By Mihaela-Simona Circiu, Michael Felux, German Aerospace Center (DLR), and Sam Pullen, Stanford University
Several ground-based augmentation system (GBAS) stations have become operational in recent years and are used on a regular basis for approach guidance. These include airports at Sydney, Malaga, Frankfurt and Zurich. These stations are so-called GBAS Approach Service Type C (GAST C) stations and support approaches only under CAT-I weather conditions; that is, with a certain minimum visibility. Standards for stations supporting CAT-II/III operations (low visibility or automatic landing, called GAST D), are expected to be agreed upon by the International Civil Aviation Organization (ICAO) later this year. Stations could be commercially available as soon as 2018.
However, for both GAST C and D, the availability of the GBAS approach service can be significantly reduced under active ionospheric conditions. One potential solution is the use of two frequencies and multiple constellations in order to be able to correct for ionospheric impacts, detect and remove any compromised satellites, and improve the overall satellite geometry (and thus the availability) of the system.
A new multi-frequency and multi-constellation (MFMC) GBAS will have different potential error sources and failure modes that have to be considered and bounded. Thus, all performance and integrity assumptions of the existing single-frequency GBAS must be carefully reviewed before they can be applied to an MFMC system. A central element for ensuring the integrity of the estimated position solution is the calculation of protection levels. This is done by modeling all disturbances to the navigation signals in a conservative way and then estimating a bound on the resulting positioning errors that is valid at an allocated integrity risk probability.
One of the parameters that is different for the new signals and must be recharacterized is the residual uncertainty attributed to the corrections from the ground system (σpr_gnd). A method to assess the contribution of residual noise and multipath is by evaluating the B-values in GBAS, which give an estimate of the error contribution from a single reference receiver to a broadcast correction. Independent data samples over at least one day (for GPS) are collected and sorted by elevation angle. Then the mean and standard deviations for each elevation bin are determined.
Here, we evaluate the E1 and E5a signals broadcast by the operational Galileo satellites now in orbit. In the same manner as we did for GPS L5 in earlier research, we determine the σpr_gnd values for these Galileo signals. As for GPS L5, results show a lower level of noise and multipath in unsmoothed pseudorange measurements compared to GPS L1 C/A code.
DLR GBAS Facility
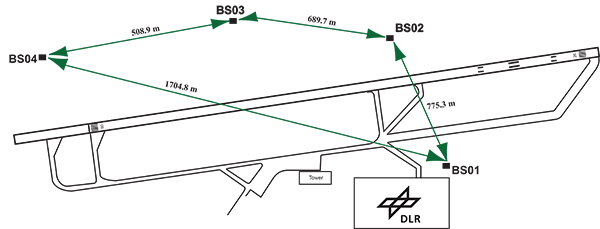
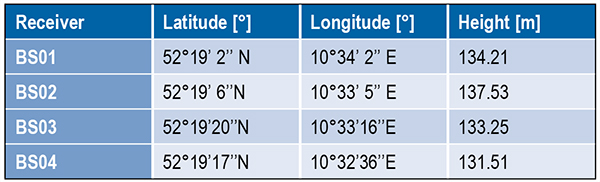
DLR has set up a GBAS prototype at the research airport in Braunschweig (ICAO identifier EDVE) near the DLR research facility there. This ground station has recently been updated and now consists of four GNSS receivers connected to choke ring antennas, which are mounted at heights between 2.5 meters and 7.5 meters above equipment shelters. All four receivers are capable of tracking GPS L5 (in addition to GPS L1 and L2 semi-codeless) and Galileo E1 and E5a signals. Figure 1 gives an overview of the current ground station layout, and Table 1 gives the coordinates of the antennas.
Figure 1. DLR ground facility near Braunschweig Airport, also shown in opening photo at left.Table 1. Ground receiver antenna coordinates.
Smoothing Techniques
The GBAS system corrects for the combined effects of multiple sources of measurement errors that are highly correlated between reference receivers and users, such as satellite clock, ephemeris error, ionospheric delay error, and tropospheric delay error, through the differential corrections broadcast by the GBAS ground subsystem. However, uncorrelated errors such as multipath and receiver noise can make a significant contribution to the remaining differential error. Multipath errors are introduced by the satellite signal reaching the antenna via both the direct path from the satellites and from other paths due to reflection. These errors affect both the ground and the airborne receivers, but are different at each and do not cancel out when differential corrections are applied.
To reduce these errors, GBAS performs carrier smoothing. Smoothing makes use of the less noisy but ambiguous carrier-phase measurements to suppress the noise and multipath from the noisy but unambiguous code measurements.
The current GBAS architecture is based on single-frequency GPS L1 C/A code measurements only. Single-frequency carrier smoothing reduces noise and multipath, but ionospheric disturbances can cause significant differential errors when the ground station and the airborne user are affected by different conditions. With the new available satellites (GPS Block IIF and Galileo) broadcasting in an additional aeronautical band (L5 / E5), this second frequency could be used in GBAS to overcome many current limitations of the single-frequency system.
Dual-frequency techniques have been investigated in previous work. Two dual-frequency smoothing algorithms, Divergence Free (Dfree) and Ionosphere Free (Ifree), have been proposed to mitigate the effect of ionosphere gradients.
The Dfree output removes the temporal ionospheric gradient that affects the single-frequency filter but is still affected by the absolute difference in delay created by spatial gradients. The main advantage of Dfree is that the output noise is similar to that of single-frequency smoothing, since only one single-frequency code measurement is used as the code input (recall that carrier phase noise on both frequencies is small and can be neglected).
Ifree smoothing completely removes the (first-order) effects of ionospheric delay by using ionosphere-free combinations of code and phase measurements from two frequencies as inputs to the smoothing filter. Unlike the Dfree, the Ifree outputs contain the combination of errors from two code measurements. This increases the standard deviation of the differential pseudorange error and thus also of the position solution.
Noise and Multipath in New GNSS Signals
GBAS users compute nominal protection levels (H0) under a fault-free assumption. These protection levels are conservative overbounds of the maximum position error after application of the differential corrections broadcast by the ground system, assuming that no faults or anomalies affect the position solution. In order to compute these error bounds, the total standard deviation of each differentially corrected pseudorange measurements has to be modeled. The standard deviation of the residual uncertainty (σn, for the nth satellite) consists of the root-sum-square of uncertainties introduced by atmospheric effects (ionosphere, troposphere) as well as of the contribution of the ground multipath and noise. In other words, these error components are combined to estimate σn2 as described in the following equation:
(1)
The ground broadcasts a value for σpr_gnd (described later in the section) associated with the pseudorange correction for each satellite. These broadcast values are based on combinations of theoretical models and actual measurements collected from the ground receivers that represent actual system characteristics. Unlike the ground, σpr_air is computed based entirely on a standardized error model. This is mainly to avoid the evaluation of multipath for each receiver and each aircraft during equipment approval.
In addition to the characteristics of nearby signal reflectors, multipath errors are mainly dependent on signal modulation and other signal characteristics (for example, power, chip rate). In earlier research, we showed that the newly available L5 signals broadcast by the GPS Block IIF satellites show better performance in terms of lower noise and multipath. This mainly results from an increased transmitted power and a 10 times higher chip rate on L5 compared to the L1 C/A code signal.
In this work, we extend this evaluation to the new Galileo signals and investigate their impact on a future multi-frequency, multi-constellation GBAS. Characterization of these new signals is based on ground subsystem measurements, since no flight data with GPS L5 or Galileo measurements are available at the moment. We assume that the improvements observed by ground receivers are also applicable to airborne measurements. This assumption will be validated as soon as flight data are available.
The measurements used were collected from the DLR GBAS test bed over 10 days (note that Galileo satellite ground track repeatability is 10 sidereal days) between the December 14 and 23, 2013. In that period, four Galileo and four Block IIF GPS satellites were operational and broadcast signals on both aeronautical bands E1 / L1 and E5a / L5.
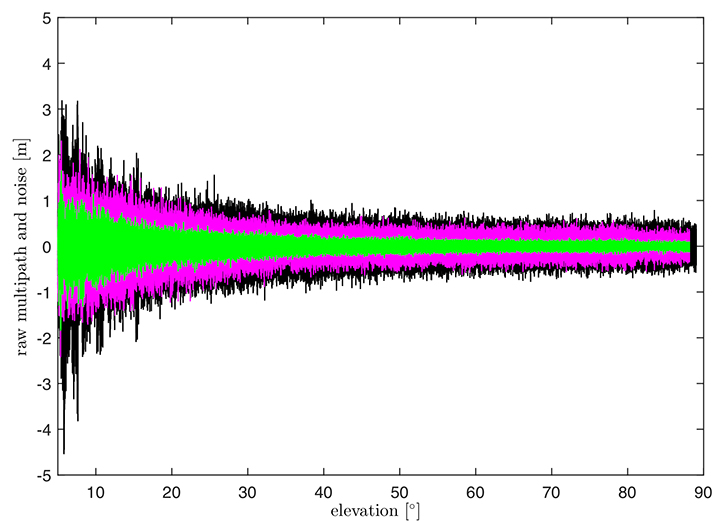
In Figure 2, the suppression of multipath and noise on the Galileo signals can be observed, where the code multipath and noise versus elevation for GPS L1 C/A BSPK(1), Galileo E1 (BOC (1,1)) and Galileo E5a (BPSK(10)) signals are shown. The code multipath and noise was estimated using the linear dual-frequency combination described in equation (2), where MPi represents the code multipath and noise on frequency i, ρi the code measurement, and ϕi,and ϕj represent the carrier-phase measurements on frequencies i and j, respectively. Carrier phase noises are small and can be neglected.
(2)
Figure 2. Raw multipath function of elevation for GPS L1, Galileo E1 (BOC (1,1)) and Galileo E5a (BPSK(10)) signals.
The multipath on the Galileo E1 (BOC(1,1)) signal (the magenta curve) is lower than the GPS L1 C/A (BPSK(1))(black curve), especially for low elevation, where the advantage of the E1 BOC(1,1) is more pronounced. The lower values can be explained by the wider transmission bandwidth on E1 and the structure of the BOC signal. Galileo E5a (green data in Figure 2) again shows a better performance than Galileo E1. This was expected due to the higher chip rate and higher signal power. A comparison of the raw multipath and noise standard deviations for GPS L1, L5 and Galileo E1, E5a signals is presented in Figure 3.
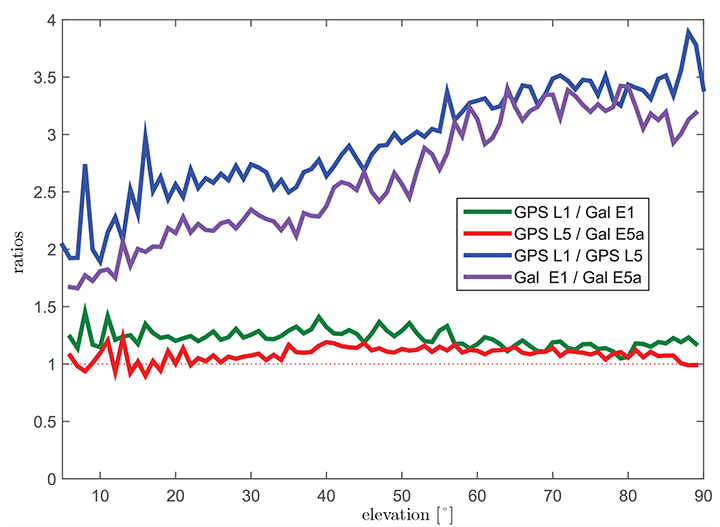
Figure 3. Ratios of the multipath and noise standard deviation function of elevation.
The curves there show the ratios of the standard deviations for each elevation bin. The values for GPS L1 are almost 1.5 times larger than those for Galileo E1 BOC(1,1) (green curve) for elevations below 20°. For high elevations, the ratio approaches 1.0. This corresponds to the observations in the raw multipath plot ( Figure 2). With the same signal modulation and the same chip rate, E5a and L5 have very similar results (red curve), and the ratio stays close to 1.0 for all elevations.
The blue and the purple curves in Figure 3 show the ratio of GPS L1 C/A (BPSK(1)) and GPS L5 (BPSK(10)), and Galileo E1 (BOC(1,1)) and Galileo E5a (BPSK(10)), respectively. The ratio of GPS L1 to GPS L5 (blue curve) increases with elevation from values around 2.5 for low elevations, reaching values above 3.5 for elevations higher than 60°. As Galileo E1 performs better, the ratio between Galileo E1 and Galileo E5a (purple curve) is smaller, from a value of 1.5 for elevations below 10 degrees to a value of 3.0 for high elevations.
Until now, we have presented the evaluation of raw code noise and multipath. However, in GBAS, carrier smoothing is performed to minimize the effect of code noise and multipath. The value that describes the noise introduced by the ground station is represented by a standard deviation called σpr_gnd and is computed based on the smoothed pseudoranges from the reference receivers. In the following section, we focus on the evaluation of σpr_gnd using different signals and different smoothing time constants. Note that, in this study, σpr_gnd contains only smoothed multipath and noise; no other contributions (for example, inflation due to signal deformation or geometry screening) are considered.
B-values and σpr_gnd
B-values represent estimates of the associated noise and multipath with the pseudorange corrections provided from each receiver for each satellite, as described in Eurocae ED-114A and RTCA DO-253C. They are used to detect faulty measurements in the ground system. For each satellite-receiver pair B(i,j), they are computed as:
(3)
where PRCTX represents the candidate transmitted pseudorange correction for satellite i (computed as an average over all M(i) receivers), and PRCSCA(i,k) represents the correction for satellite i from receiver k after smoothed clock adjustment, which is the process of removing the individual receiver clock bias from each reference receiver and all other common errors from the corrections. The summation computes the average correction over all M(k) receivers except receiver j. This allows detection and exclusion of receiver j if it is faulty. If all B-values are below their thresholds, the candidate pseudorange correction PRCTX is approved and transmitted. If not, a series of measurement exclusions and PRC and B-value recalculations takes place until all revised B-values are below threshold. Note that, under nominal conditions using only single-frequency measurements, the B-values are mainly affected by code multipath and noise.
Under the assumption that multipath errors are uncorrelated across reference receivers, nominal B-values can be used to assess the accuracy of the ground system. The standard deviation of the uncertainty associated with the contribution of the corrections (σpr_gnd) for each receiver m is related to the standard deviation of the B-values by:
(4)
where M represents the number of the receivers and N represents the number of satellites used. The final sigma takes into account the contribution from all receivers and is computed as the root mean square of the standard deviation of the uncertainties associated with each receiver (Equation 4).
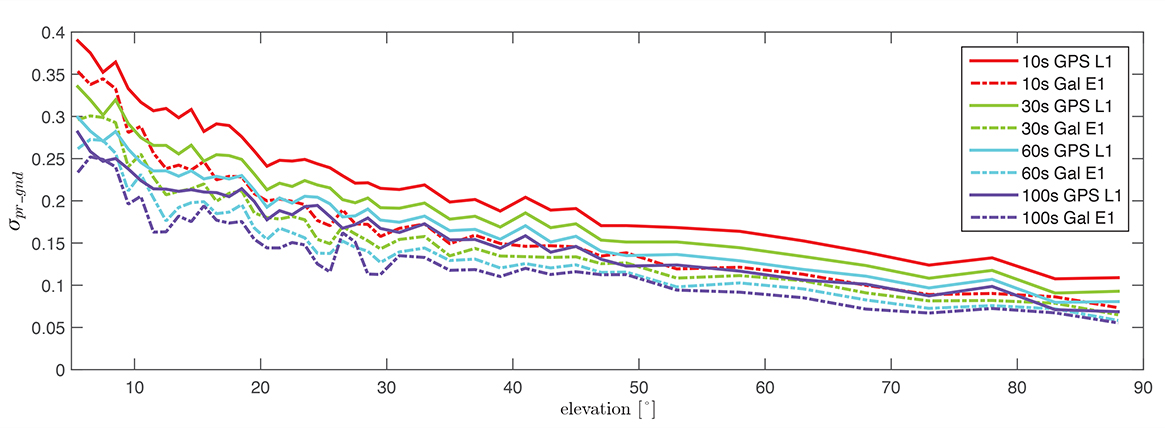
Figure 4 shows the evaluation of (σpr_gnd) for the Galileo E1, BOC(1,1) signal and the GPS L1 C/A signal for increasing smoothing time constants (10, 30, 60, and 100 seconds). Starting with a 10-second smoothing constant, Galileo E1 shows much better performance than GPS L1. The difference shrinks as the smoothing constant increases due to the effectiveness of smoothing in reducing noise and short-delay multipath. However, even with 100-second smoothing (the purple curves), Galileo E1 BOC(1,1) shows lower values of (σpr_gnd).
Figure 4. σ(pr_gnd) versus elevation for Galileo E1 (dotted lines) and GPS L1 (solid lines for different smoothing constants: red (10s), green (30s), cyan (60s), purple (100s).
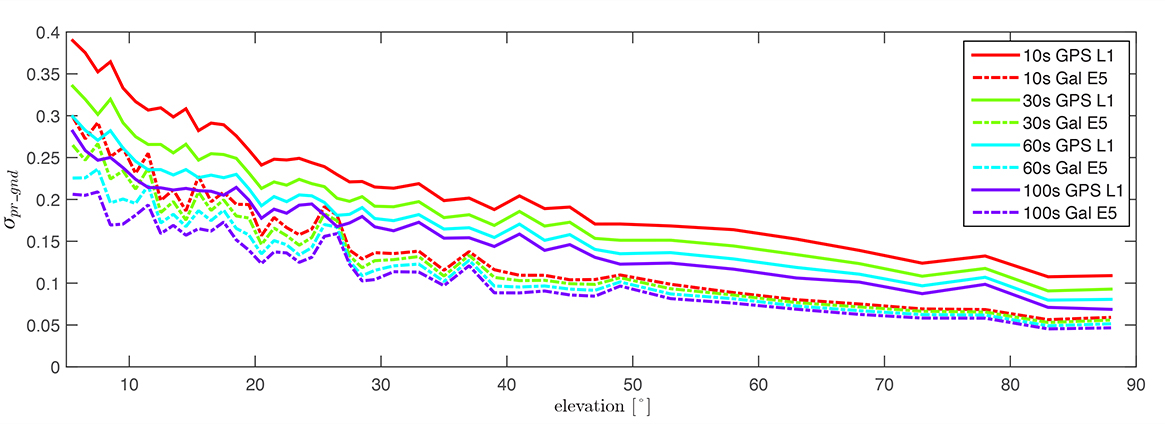
A similar comparison is presented in Figure 5, of the performance of GPS L1 and Galileo E5a. The Galileo E5a signal is significantly less affected by multipath, and the difference stays more pronounced than in the Galileo E1 – GPS L1, even with 100-second smoothing. It can be also observed that the Galileo signals have a lower sensitivity to the smoothing constant. The Galileo E1 signal shows an increase of sensitivity for low elevations (below 40°), while on E5a, a smoothing constant larger than 10 seconds has almost no impact on the residual error. Thus, a shorter smoothing constant on Galileo E5a generates approximately the same residual noise and multipath a 100-second smoothing constant on GPS L1.
Figure 5. σ(pr_gnd) versus elevation for Galileo E5a (dotted lines) and GPS L1 (solid lines) for different smoothing constants: red (10s), green (30s), cyan (60s), purple (100s).
The values for (σpr_gnd) are, however, impacted by the number of satellites which are used to determine a correction. Since only a very limited number of satellites broadcasting L5 and Galileo signals are currently available, these results should be considered preliminary. The first evaluations strongly indicate that with the new signals, we get better ranging performance. Based on the performance advantage of the new signals, a decrease of the smoothing constant is one option for future application. This would reduce the time required (for smoothing to converge) before including a new satellite or re-including a satellite after it was lost.
In the current GAST-D implementation, based on GPS L1 only, guidance is developed based on a 30-second smoothing time constant. A second solution, one with 100 seconds of smoothing, is used for deriving the Dv and Dl parameters from the DSIGMA monitor and thus for protection level bounding (it is also used for guidance in GAST-C). During the flight, different flight maneuvers or the blockage by the airframe can lead to the loss of the satellite signal.
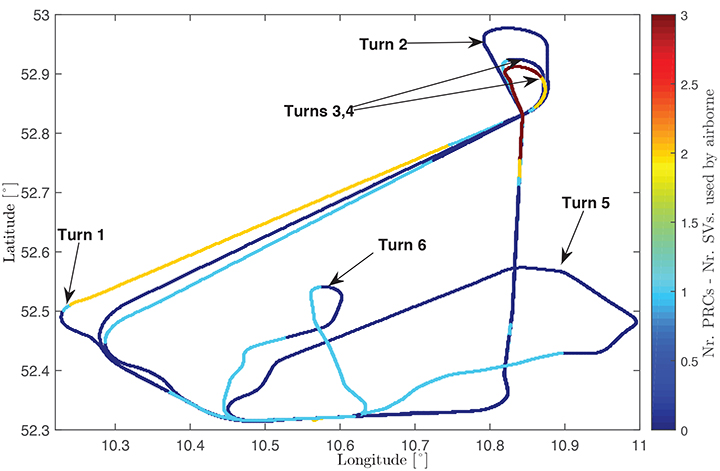
Figure 6 shows the ground track of a recent flight trial conducted by DLR in November 2014. The colors represent the difference between the number of satellites used by the ground subsystem (with available corrections) and the number of satellites used by the airborne subsystem in the GAST-D position solution. One of the purposes of the flight was to characterize the loss of satellite signals in turns. In turns with a steeper bank angle, up to 3 satellites are lost (Turns 1, 3, and 4), while on a wide turn with a small bank angle (Turn 2), no loss of satellite lock occurred. It is also possible for airframe to block satellite signals, leading to a different number of satellites between ground and airborne even without turns.
Figure 6. Ground track of a flight trial conducted by DLR. The colors represent difference between number of SVs used by the ground system and number of SVs used by the airborne.
With this in mind, a shorter smoothing constant would allow the satellites lost to turns or to airframe blockage to be re-included more rapidly in the position solution. However, a new smoothing constant would have to be validated with a larger amount of data. Data from flights trials has to be evaluated as well to confirm that similar levels of performance are reresentative of the air multipath and noise.
In a future dual-frequency GBAS implementation, an important advantage of lower multipath and noise is to improve the Ifree position solution. In earlier research, we demonstrated that the error level of the Dfree solution is almost the same as for single-frequency, but an increase in error by a factor of 2.33 was computed for the Ifree standard deviation based on L1 C/A code and L2 semi-codeless measurements.
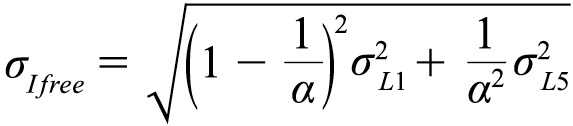
If the errors on L1 (E1) and L5 (E5a) code and carrier phase measurements are statistically independent the standard deviation of the σIfree can be written as,
(5)
where α=1−f 21 ∕ f 25, and σL1,σL5 represent the standard deviations of the smoothed noise and multipath for L1 (E1) and L5 (E5a), respectively. Considering σpr_gnd,L1(E1)) = σpr_gnd,L5(E5a)) in equation (5), the noise and multipath error on Ifree (σIfree) increases by a factor of 2.59.
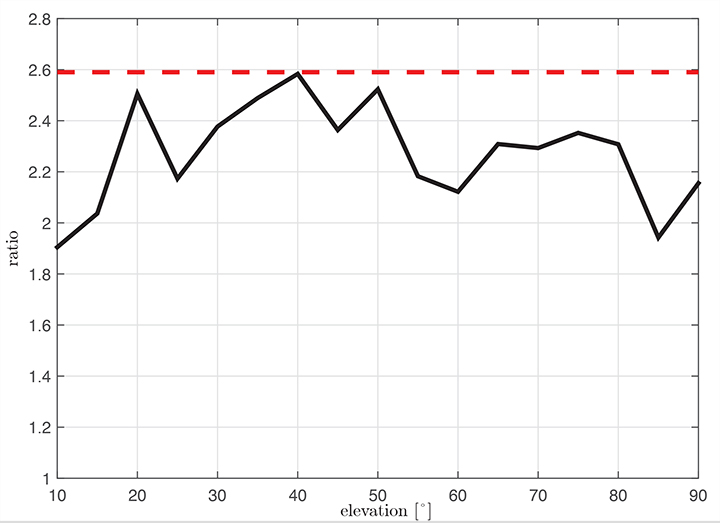
Figure 7 shows the ratio σIfree/σL1 using measured data. We observe that the measured ratio (the black curve) is below the theoretical ratio computed based on the assumption of statistically independent samples (the constant value of 2.59). This is explained by the fact that the multipath errors in the measurements are not independent but have some degree of statistical correlation. The standard deviations are computed based on the same data set used in the raw multipath and noise assessment using 100-second smoothed measurements sorted into elevation bins of 10° spacing.
Figure 7. Measured ratio σIfree/σL1 function of elevation.
Conclusion
We have shown how GBAS can benefit from the new signals provided by the latest generation of GPS and Galileo satellites. We have demonstrated improved performance in terms of lower noise and multipath in data collected in our GBAS test bed. When GBAS is extended to a multi-frequency and multi-constellation system, these improvements can be leveraged for improved availability and better robustness of GBAS against ionospheric and other disturbances.
Acknowledgment
Large portions of this work were conducted in the framework of the DLR internal project, GRETA.
Manufacturers
The ground facility consists of four JAVAD GNSS Delta receivers, all connected to Leica AR 25choke ring antennas.
Mihaela-Simona Circiu is is a research associate at the German Aerospace Center (DLR). Her research focuses on multi-frequency multi-constellation Ground Based Augmentation System. She obtained a 2nd level Specialized Master in Navigation and Related Applications from Politecnico di Torino.
MIchael Felux is is a research associate at the German Aerospace Center (DLR). He is coordinating research in the field of ground-based augmentation systems and pursuing a Ph.D. in Aerospace Engineering at the Technische Universität München.
Sam Pullen is a senior research engineer at Stanford University, where he is the director of the Local Area Augmentation System (LAAS) research effort. He has supported the FAA and others in developing GNSS system concepts, requirements, integrity algorithms, and performance models since obtaining his Ph.D. from Stanford in Aeronautics and Astronautics.